JP2007155472A - 形状測定装置,形状測定方法 - Google Patents
形状測定装置,形状測定方法 Download PDFInfo
- Publication number
- JP2007155472A JP2007155472A JP2005350378A JP2005350378A JP2007155472A JP 2007155472 A JP2007155472 A JP 2007155472A JP 2005350378 A JP2005350378 A JP 2005350378A JP 2005350378 A JP2005350378 A JP 2005350378A JP 2007155472 A JP2007155472 A JP 2007155472A
- Authority
- JP
- Japan
- Prior art keywords
- light
- measurement
- shape
- sample
- condenser lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
【課題】形状測定対象の試料の大きさにかかわらず,高い分解能での形状測定を行うことが可能な形状測定装置,及び形状測定方法を提供すること
【解決手段】所定の基準平面Cに沿って試料11に対向配置された第1の集光レンズ13,前記基準平面からの距離が各々異なる複数の出射位置から複数の測定光を前記第1の集光レンズ13に向けて出射するLEDアレイ12,前記試料11により反射された反射光を集光する第2の集光レンズ13,前記第2の集光レンズ13に集光される前記反射光の強度を検出する受光素子アレイ9の相互の位置関係を保持して光学系βとして形成し,前記光学系βと前記試料11との前記基準平面Cに略平行な方向(走査方向)に相対位置を変位させる。
【選択図】図3
【解決手段】所定の基準平面Cに沿って試料11に対向配置された第1の集光レンズ13,前記基準平面からの距離が各々異なる複数の出射位置から複数の測定光を前記第1の集光レンズ13に向けて出射するLEDアレイ12,前記試料11により反射された反射光を集光する第2の集光レンズ13,前記第2の集光レンズ13に集光される前記反射光の強度を検出する受光素子アレイ9の相互の位置関係を保持して光学系βとして形成し,前記光学系βと前記試料11との前記基準平面Cに略平行な方向(走査方向)に相対位置を変位させる。
【選択図】図3
Description
本発明は,共焦点法を用いて被測定物の試料に照射された反射光を線状の受光部で検出することにより,前記試料の形状を測定する形状測定装置,及び形状測定方法に関するものである。
試料の形状を測定する方法として,例えば特許文献1に記載のような共焦点法が知られている。共焦点法とは,測定光が通過するレンズによる焦点付近に試料を設置し,試料の表面と前記焦点の位置とが一致した場合に,前記試料の表面で反射される反射光の強度が大きくなることを利用した形状測定の方法である。
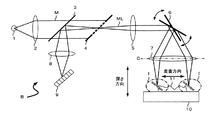
共焦点法を用いて前記試料の2次元的形状を測定するための構成として,例えば非特許文献1に記載の構成が知られている。図3は,非特許文献1に記載の,共焦点法が用いられた形状測定装置の概略構成図である。以下,図3を参照しつつ,従来例における形状測定装置の概略構成について説明する。
共焦点法を用いて前記試料の2次元的形状を測定するための構成として,例えば非特許文献1に記載の構成が知られている。図3は,非特許文献1に記載の,共焦点法が用いられた形状測定装置の概略構成図である。以下,図3を参照しつつ,従来例における形状測定装置の概略構成について説明する。
図3に示されるように,従来例における形状測定装置Bは,光源1,レンズ2,ビームスプリッタ3,ピンホールアレイ4,レンズ5,走査ミラー6,結像レンズ7,集光レンズ8,受光素子アレイ9等を有して概略構成される。
Xeランプ等からなる前記光源1より形状測定用の光(以下,測定光Mという)が出力される。前記測定光Mは前記レンズ2により偏向されつつ,前記ビームスプリッタ3を通過して前記ピンホールアレイ4に入射する。
前記ピンホールアレイ4は等間隔でピンホールが形成された板状部材である。前記測定光Mは,前記ピンホールアレイ4における前記ピンホールを通過する際に光線列化(以下,前記ピンホールを通過した前記測定光Mを測定光線MLという)される(尚,前記測定光線MLは図3には1つしか描かれていないが,実際には各ピンホールから照射される)。前記ピンホール各々で光線列化された前記測定光線ML各々は回折により径を拡大しつつ前記レンズ5に入射して偏向される。更に前記測定光線MLは,所定の角度で往復回動される前記走査ミラー6により走査光に変換され,前記形状測定装置B内において予め定められた平面である基準平面Cに沿って配置された前記結像レンズ7に入射される。
前記測定光線ML各々は,前記ピンホール各々と前記基準変面Cとの光学距離,及び前記測定光線MLの波長により定められる焦点位置において,前記結像レンズ7により結像される。前記ピンホールアレイ4は前記測定光線ML各々の光路において前記基準平面Cから傾けられて配置されており,従って前記ピンホール各々から前記基準平面Cへの光学距離は異なっている。これにより,前記検出光線DL各々の焦点位置(ピンホールの像Iが形成される位置)も,前記基準平面Cに対して傾いた線状に形成される。
以下,前記基準平面Cに直交する方向を深さ方向という。また,前記深さ方向における前記基準平面との距離を深さと表現する。更に,前記深さ方向に直交する方向を走査方向という。上述のように,前記測定光線ML各々では前記焦点位置の深さが異なっている。これにより,前記測定光線MLと深さとは一対一に対応し,前記走査ミラー6の往復回動に伴って前記測定光線ML各々の焦点位置(ピンホールの像I)はそれに対応する深さにおいて前記走査方向に走査する。
Xeランプ等からなる前記光源1より形状測定用の光(以下,測定光Mという)が出力される。前記測定光Mは前記レンズ2により偏向されつつ,前記ビームスプリッタ3を通過して前記ピンホールアレイ4に入射する。
前記ピンホールアレイ4は等間隔でピンホールが形成された板状部材である。前記測定光Mは,前記ピンホールアレイ4における前記ピンホールを通過する際に光線列化(以下,前記ピンホールを通過した前記測定光Mを測定光線MLという)される(尚,前記測定光線MLは図3には1つしか描かれていないが,実際には各ピンホールから照射される)。前記ピンホール各々で光線列化された前記測定光線ML各々は回折により径を拡大しつつ前記レンズ5に入射して偏向される。更に前記測定光線MLは,所定の角度で往復回動される前記走査ミラー6により走査光に変換され,前記形状測定装置B内において予め定められた平面である基準平面Cに沿って配置された前記結像レンズ7に入射される。
前記測定光線ML各々は,前記ピンホール各々と前記基準変面Cとの光学距離,及び前記測定光線MLの波長により定められる焦点位置において,前記結像レンズ7により結像される。前記ピンホールアレイ4は前記測定光線ML各々の光路において前記基準平面Cから傾けられて配置されており,従って前記ピンホール各々から前記基準平面Cへの光学距離は異なっている。これにより,前記検出光線DL各々の焦点位置(ピンホールの像Iが形成される位置)も,前記基準平面Cに対して傾いた線状に形成される。
以下,前記基準平面Cに直交する方向を深さ方向という。また,前記深さ方向における前記基準平面との距離を深さと表現する。更に,前記深さ方向に直交する方向を走査方向という。上述のように,前記測定光線ML各々では前記焦点位置の深さが異なっている。これにより,前記測定光線MLと深さとは一対一に対応し,前記走査ミラー6の往復回動に伴って前記測定光線ML各々の焦点位置(ピンホールの像I)はそれに対応する深さにおいて前記走査方向に走査する。
一方,前記測定光線ML各々の焦点位置付近には試料設置台10が設けられており,前記試料設置台10上には形状測定対象の試料11(被測定物)が設置されている。前記試料11により前記測定光線ML各々は反射され,前記測定光線MLの入射時の光路を逆行する。以下,前記試料11により反射された光を反射光という。また,前記反射光各々は前記ピンホールアレイ4設けられた前記ピンホールを通過する。更に,前記反射光各々は前記ビームスプリッタ3により反射され,前記集光レンズ8により集光される。
前記受光素子アレイ9は複数の受光素子(CCD)からなるものである。前記受光素子各々は,前記集光レンズ8を通過した前記反射光各々の(即ち,複数の)焦点位置に設けられたものであり,前記測定光線ML及び前記深さと一対一の対応関係を有する。
記受光素子アレイ9は,自身に入射された前記反射光をその強度に応じた信号レベルの電気信号に変換し,これにより前記反射光の強度を検出する機能を有している。
前記受光素子アレイ9は複数の受光素子(CCD)からなるものである。前記受光素子各々は,前記集光レンズ8を通過した前記反射光各々の(即ち,複数の)焦点位置に設けられたものであり,前記測定光線ML及び前記深さと一対一の対応関係を有する。
記受光素子アレイ9は,自身に入射された前記反射光をその強度に応じた信号レベルの電気信号に変換し,これにより前記反射光の強度を検出する機能を有している。
図4は,前記形状測定装置Bで用いられている,共焦点法による形状測定の方法を説明するための概念図である。以下,図4を参照しつつ,共焦点法による形状測定の方法について説明する。
図4(a),(b),(c)は前記走査ミラー6により前記測定光線MLの焦点位置(前記ピンホールの像I)が前記基準平面Cに沿って前記走査方向に走査される様子を表している。以下,前記ピンホール各々の像Iのうちの特定の像I1に着目する。
図4(a)の時点では,前記試料11の表面における特定箇所αは前記像Iのいずれとも一致していない。図4(b)の時点では,前記像Iのうちの特定の像I1と前記特定箇所αとが一致している。図4(c)の時点では,前記特定の像I1は前記特定箇所αから再び離れている。
このような場合,前記特定の像I1を形成する前記測定光線MLが前記試料11により反射され,その反射光が前記受光素子アレイ9の有する複数の受光素子のうちの当該測定光線MLに対応する受光素子に入射されたときの光量は,前記測定光線MLの(前記結像レンズ7による)焦点位置において前記試料11により反射される図4(b)のときに際立って大きくなる。
従って,前記受光素子による反射光の強度の検出結果が大きくなったときに,それらの受光素子に対応する前記測定光線MLが,その焦点位置において前記試料11に反射されたと判別することが可能である。これは,その前記受光素子に対応する深さの位置に前記試料11の表面があるとの判別に相当する。
前記測定光線MLの走査中において,前記受光素子個々による前記検出強度の時間変化の観測は,前記走査方向において前記表面と前記深さとが一致した位置をピックアップする意味を持つ。前述の如く,受光素子各々は深さ毎における前記検出強度の時間変化を観測するものであり,それらの検出結果の集計は,前記走査方向と前記深さ方向とに沿う平面内における前記表面の軌跡,言い換えると,前記走査方向の変化に対して前記表面が前記深さ方向に変位する様子の観測と等価な意味を持つ。
特開平10−9827号公報
宮崎大介ほか,「傾斜面走査による共焦点三次元形状計測」,Optics Japan’99 講演予稿集,p.259−260(1999)
図4(a),(b),(c)は前記走査ミラー6により前記測定光線MLの焦点位置(前記ピンホールの像I)が前記基準平面Cに沿って前記走査方向に走査される様子を表している。以下,前記ピンホール各々の像Iのうちの特定の像I1に着目する。
図4(a)の時点では,前記試料11の表面における特定箇所αは前記像Iのいずれとも一致していない。図4(b)の時点では,前記像Iのうちの特定の像I1と前記特定箇所αとが一致している。図4(c)の時点では,前記特定の像I1は前記特定箇所αから再び離れている。
このような場合,前記特定の像I1を形成する前記測定光線MLが前記試料11により反射され,その反射光が前記受光素子アレイ9の有する複数の受光素子のうちの当該測定光線MLに対応する受光素子に入射されたときの光量は,前記測定光線MLの(前記結像レンズ7による)焦点位置において前記試料11により反射される図4(b)のときに際立って大きくなる。
従って,前記受光素子による反射光の強度の検出結果が大きくなったときに,それらの受光素子に対応する前記測定光線MLが,その焦点位置において前記試料11に反射されたと判別することが可能である。これは,その前記受光素子に対応する深さの位置に前記試料11の表面があるとの判別に相当する。
前記測定光線MLの走査中において,前記受光素子個々による前記検出強度の時間変化の観測は,前記走査方向において前記表面と前記深さとが一致した位置をピックアップする意味を持つ。前述の如く,受光素子各々は深さ毎における前記検出強度の時間変化を観測するものであり,それらの検出結果の集計は,前記走査方向と前記深さ方向とに沿う平面内における前記表面の軌跡,言い換えると,前記走査方向の変化に対して前記表面が前記深さ方向に変位する様子の観測と等価な意味を持つ。
しかしながら,上述の非特許文献1に記載の技術では,形状測定対象の試料の大きさは,走査ミラー6による像Iの走査範囲若しくは結像レンズ7が測定光線MLを集光可能な範囲内に限られてしまい,測定対象がその大きさによる制限を受けるという問題点がある。
このような問題点は,前記結像レンズ7の径を大きくすることで解決されるが,前記結像レンズ7の径が大きくなると,開口率NAが小さくなり,以下の式(1)に従って測定光線MLの焦点位置が基準平面Cから離れた位置に形成される(いわゆる,焦点深度dが深くなる状態)。
d=nλ/2(NA)2 …(1)
前記焦点深度dが深くなると,ピンホールアレイ4における前記ピンホールの像I各々の(焦点位置の),深さ方向における間隔が広くなり,形状測定の分解能が低下する。
以上のように,従来例に示される技術では,形状測定対象の試料の大きさによる制限を緩和することと,形状測定の分解能を高めることとの両立は不可能であった。
従って,本発明は上記事情に鑑みてなされたものであり,その目的とするところは,形状測定対象の試料の大きさにかかわらず,高い分解能での形状測定を行うことが可能な形状測定装置,及び形状測定方法を提供することにある。
このような問題点は,前記結像レンズ7の径を大きくすることで解決されるが,前記結像レンズ7の径が大きくなると,開口率NAが小さくなり,以下の式(1)に従って測定光線MLの焦点位置が基準平面Cから離れた位置に形成される(いわゆる,焦点深度dが深くなる状態)。
d=nλ/2(NA)2 …(1)
前記焦点深度dが深くなると,ピンホールアレイ4における前記ピンホールの像I各々の(焦点位置の),深さ方向における間隔が広くなり,形状測定の分解能が低下する。
以上のように,従来例に示される技術では,形状測定対象の試料の大きさによる制限を緩和することと,形状測定の分解能を高めることとの両立は不可能であった。
従って,本発明は上記事情に鑑みてなされたものであり,その目的とするところは,形状測定対象の試料の大きさにかかわらず,高い分解能での形状測定を行うことが可能な形状測定装置,及び形状測定方法を提供することにある。
上記目的を達成するために本発明は,被測定物(以下,試料という)に測定光を照射し,その反射光に基づいて前記試料の形状を測定する際に用いられる形状測定装置であって,所定の基準平面に沿って前記試料に対向配置された第一の集光レンズ,前記基準平面からの距離が各々異なる複数の出射位置から複数の測定光を前記第1の集光レンズに向けて出射する測定光出射部,前記試料により反射された反射光を集光する第2の集光レンズ及び前記第2の集光レンズに集光される前記反射光の強度を検出する光検出部各々の相互の位置関係を保持して光学系として形成し,前記光学系と前記試料との前記基準平面に略平行な方向(図1,図3における走査方向)に相対位置を変位させることが可能な形状測定装置として構成される。
このような構成により,形状の測定は前記試料若しくは前記光学系を変位させつつ行うことが可能であるため,前記試料の大きさが前記測定光を集光する前記第1の集光レンズの幅に限定されない。従って,前記第1の集光レンズとして径の小さいものも用いることが可能であるため,十分大きな開口率を得ることが可能であり,前記基準平面に直交する深さ方向の高い分可能を得ることが可能である。
尚,前記光検出部は前記第2の集光レンズの焦点付近において前記反射光を検出するのが望ましい。
ここで,前記第1の集光レンズと前記第2の集光レンズとを,同一のレンズにより兼用させることが可能であり,この場合には構成の部品数及び装置のコストを低下させることが可能である。
このような構成により,形状の測定は前記試料若しくは前記光学系を変位させつつ行うことが可能であるため,前記試料の大きさが前記測定光を集光する前記第1の集光レンズの幅に限定されない。従って,前記第1の集光レンズとして径の小さいものも用いることが可能であるため,十分大きな開口率を得ることが可能であり,前記基準平面に直交する深さ方向の高い分可能を得ることが可能である。
尚,前記光検出部は前記第2の集光レンズの焦点付近において前記反射光を検出するのが望ましい。
ここで,前記第1の集光レンズと前記第2の集光レンズとを,同一のレンズにより兼用させることが可能であり,この場合には構成の部品数及び装置のコストを低下させることが可能である。
実際に形状測定を行う際には,例えばアクチュエータにより前記試料,若しくは前記光学系を一定速度で走査し,前記光検出部の検出結果を所定の取得周期で取得することが考えられる。その場合,前記試料の測定方向に対して特定のピッチの間隔を有する読み取り箇所毎に前記反射光の光強度が取得される。
このとき,前記第1の集光レンズにより集光される前記測定光の焦点位置の前記走査方向における間隔と前記ピッチとが,一方が他方の自然数倍となる関係であることが望ましい。このようにすることで,前記試料の前記走査方向における読み取り箇所を前記受光素子毎(言い換えると,深さ毎)に統一することが可能であるため,データの補完等の作業を行う必要が無く,データ処理,集計が簡易になる。
また,前記試料若しくは前記光学系を走査する場合には,走査の真直度誤差(厳密な理想直線に対する略直線状の走査路の形状誤差)により検出結果に誤差が生じる可能性がある。このような場合には,既知の形状を有する所定の試料に対する前記反射光の強度を検出して,その検出結果と既知の形状との差分を誤差成分とみなし,測定対象の試料についての形状測定結果を補正することが考えられる。これにより,前記真直度誤差による誤差成分が除去され,形状測定の精度が向上される。
尚,本発明は形状測定装置における形状測定方法として捉えることも可能である。
このとき,前記第1の集光レンズにより集光される前記測定光の焦点位置の前記走査方向における間隔と前記ピッチとが,一方が他方の自然数倍となる関係であることが望ましい。このようにすることで,前記試料の前記走査方向における読み取り箇所を前記受光素子毎(言い換えると,深さ毎)に統一することが可能であるため,データの補完等の作業を行う必要が無く,データ処理,集計が簡易になる。
また,前記試料若しくは前記光学系を走査する場合には,走査の真直度誤差(厳密な理想直線に対する略直線状の走査路の形状誤差)により検出結果に誤差が生じる可能性がある。このような場合には,既知の形状を有する所定の試料に対する前記反射光の強度を検出して,その検出結果と既知の形状との差分を誤差成分とみなし,測定対象の試料についての形状測定結果を補正することが考えられる。これにより,前記真直度誤差による誤差成分が除去され,形状測定の精度が向上される。
尚,本発明は形状測定装置における形状測定方法として捉えることも可能である。
本発明によれば,試料若しくは光学系が走査されるため,前記試料の大きさが,それに対向配置され測定光を集光する第1の集光レンズの径の大きさに限定されない。従って,前記第1の集光レンズとして径の小さいものを用いることが可能であり,これにより十分高い開口率を得ることが出来るため,形状測定の分解能が向上される。
以下添付図面を参照しながら,本発明の実施の形態について説明し,本発明の理解に供する。尚,以下の実施の形態は,本発明を具体化した一例であって,本発明の技術的範囲を限定する性格のものではない。
ここに,図1は本発明の実施形態に係る形状測定装置の概略構成図,図2は本発明の実施形態に係る形状測定装置による形状測定の原理を詳細に説明するための概念図,図3は従来例における形状測定装置の概略構成図,図4は共焦点法による形状測定の原理を説明するための概念図である。尚,従来例と同様の構成については同様の符号を用いるものとする。
ここに,図1は本発明の実施形態に係る形状測定装置の概略構成図,図2は本発明の実施形態に係る形状測定装置による形状測定の原理を詳細に説明するための概念図,図3は従来例における形状測定装置の概略構成図,図4は共焦点法による形状測定の原理を説明するための概念図である。尚,従来例と同様の構成については同様の符号を用いるものとする。
以下,図1を参照しつつ,本発明の実施形態に係る形状測定装置Aについて説明する。図1に示されるように,本発明の実施形態に係る形状測定装置Aは,被測定物である試料11に測定光線MLを照射してその反射光に基づいて前記試料11の形状を測定する装置であり,光学系β,PC14,アクチュエータ15等を有する。
前記PC14は当該形状測定装置Aの統括的な制御を行うものであり,演算部であるCPU,メモリ14a等からなるものである。前記PC14はアクチュエータ15と接続されており,前記PC14は前記アクチュエータ15の駆動制御を行うことが可能である。前記アクチュエータ15の駆動軸は前記試料11が設置された試料設置台10に接続されており,前記アクチュエータ15の駆動に伴って,前記試料設置台10は走査方向(図1参照)に変位する。より詳しくは,前記資料11の形状測定時には,前記アクチュエータ15は前記走査方向のうち,予め定められた上流側から下流側へと前記試料設置台10を走査する。
また,前記PC14は,前記光学系βに前記試料11の形状測定を行わせる制御を行うことが可能である。
前記PC14は当該形状測定装置Aの統括的な制御を行うものであり,演算部であるCPU,メモリ14a等からなるものである。前記PC14はアクチュエータ15と接続されており,前記PC14は前記アクチュエータ15の駆動制御を行うことが可能である。前記アクチュエータ15の駆動軸は前記試料11が設置された試料設置台10に接続されており,前記アクチュエータ15の駆動に伴って,前記試料設置台10は走査方向(図1参照)に変位する。より詳しくは,前記資料11の形状測定時には,前記アクチュエータ15は前記走査方向のうち,予め定められた上流側から下流側へと前記試料設置台10を走査する。
また,前記PC14は,前記光学系βに前記試料11の形状測定を行わせる制御を行うことが可能である。
前記光学系βは,LEDアレイ12,ビームスプリッタ3,集光レンズ13,受光素子アレイ9等からなるものである。詳しくは,前記集光レンズ13(第1の集光レンズ,第2の集光レンズの一例),前記LEDアレイ12(測定光出射手段の一例),前記ビームスプリッタ3,前記受光素子アレイ9(光検出手段の一例)は,その相対的な位置関係が保持されつつ一体形成された光学系支持部に組み込まれて支持されている。
前記受光素子アレイ9は,合計n個の受光素子が,予め定められたx軸(図1)方向に沿って等間隔かつ線状に設けられたものである。また,前記LEDアレイ12(測定光出射手段の一例)は,前記受光素子各々と一対一の対応関係を有する計n個のLED素子が等間隔かつ線状に設けられたものである。前記LED素子各々からは測定光線MLが前記集光レンズ13に向けて出射される。
前記集光レンズ13(第1の集光レンズの一例)は,当該形状測定装置Aに対して定められた平面である基準平面Cに沿って設けられており,前記試料11(被測定物の一例)に対向配置されている。前記集光レンズ13の集光作用により,前記LED素子からの測定光線ML各々は,前記試料11の近傍で結像し,言い換えると前記LED素子の像Iを形成する。
ここで,前記測定光線ML各々の出射位置(前記LED素子各々の位置)は前記基準平面Cに沿う方向及び直交方向に等間隔で分布している。従ってその焦点位置,即ち前記像Iの位置は,前記深さ方向及び前記走査方向に対して等間隔で分布する。
以下,前記像I各々を,前記走査方向の上流側に位置するものから像I1,I2…Inのように呼ぶことにする。また,前記像I1,I2…Inの前記深さ方向の位置をh1,h2…hnとする。更に,前記像I各々の前記走査方向に対する間隔をL1とする。
上述の如く,前記LED素子と前記受光素子とは一対一の対応関係を有することから,前記像I1,I2…Inと前記受光素子とも一対一の対応関係を有する。以下,前記像I1に対応する受光素子を受光素子J1,前記像I2に対応する受光素子を受光素子J2…のように呼ぶ。
尚,像I1,I2…Inを出来るだけ絞り込むように,前記LEDアレイ12におけるLED素子は極力小さいもの,即ち点光源とみなせるサイズのものを用いるのが望ましい。
前記受光素子アレイ9は,合計n個の受光素子が,予め定められたx軸(図1)方向に沿って等間隔かつ線状に設けられたものである。また,前記LEDアレイ12(測定光出射手段の一例)は,前記受光素子各々と一対一の対応関係を有する計n個のLED素子が等間隔かつ線状に設けられたものである。前記LED素子各々からは測定光線MLが前記集光レンズ13に向けて出射される。
前記集光レンズ13(第1の集光レンズの一例)は,当該形状測定装置Aに対して定められた平面である基準平面Cに沿って設けられており,前記試料11(被測定物の一例)に対向配置されている。前記集光レンズ13の集光作用により,前記LED素子からの測定光線ML各々は,前記試料11の近傍で結像し,言い換えると前記LED素子の像Iを形成する。
ここで,前記測定光線ML各々の出射位置(前記LED素子各々の位置)は前記基準平面Cに沿う方向及び直交方向に等間隔で分布している。従ってその焦点位置,即ち前記像Iの位置は,前記深さ方向及び前記走査方向に対して等間隔で分布する。
以下,前記像I各々を,前記走査方向の上流側に位置するものから像I1,I2…Inのように呼ぶことにする。また,前記像I1,I2…Inの前記深さ方向の位置をh1,h2…hnとする。更に,前記像I各々の前記走査方向に対する間隔をL1とする。
上述の如く,前記LED素子と前記受光素子とは一対一の対応関係を有することから,前記像I1,I2…Inと前記受光素子とも一対一の対応関係を有する。以下,前記像I1に対応する受光素子を受光素子J1,前記像I2に対応する受光素子を受光素子J2…のように呼ぶ。
尚,像I1,I2…Inを出来るだけ絞り込むように,前記LEDアレイ12におけるLED素子は極力小さいもの,即ち点光源とみなせるサイズのものを用いるのが望ましい。
前記PC14に接続された操作部より,前記試料11の形状測定を要求する所定の操作入力がなされた際には,前記PC14は前記光学系βに前記試料11の形状測定を行わせるとともに,前記アクチュエータ15を制御して前記試料設置台10を前記基準平面Cに沿う(つまり,前記基準平面Cと略平行な)走査方向に駆動し,つまり前記光学系β(前記光学系支持部を含む)と前記試料11(被測定物の一例)との相対位置を変位させる。前記PC14及び前記アクチュエータ15が変位手段の一例である。尚,前記試料設置台10の駆動速度V1(所定速度の一例)は前記PC14に予め設定されている。
以下,前記光学系βの機能について説明する。
前記PC14の制御により,前記光学系βの有する前記LEDアレイ12は,前記LED素子各々から測定光線MLを出力する。前記測定光線MLは,前記集光レンズ13(第1の集光レンズの一例)により集光されつつ前記試料11に照射される。前記測定光線ML各々は前記試料11により反射され(以下,反射された測定光を反射光という),再び前記集光レンズ13(第2の集光レンズの一例)を通過する際に集光される。また,前記反射光各々は前記ビームスプリッタ3に反射され,前記受光素子アレイ9に入射される。
前記受光素子アレイ9(光検出手段の一例)の有する前記受光素子J1,J2…Jnの位置は,前記反射光各々の(複数の)前記集光レンズ13(第2の集光レンズの一例)の焦点位置若しくはその略近傍に定められている。言い換えると,前記受光素子各々の位置と前記像I1,I2…Inの位置とは前記集光レンズ13により共役関係に定められており,前記受光素子は前記集光レンズ13を通過してかつ前記ビームスプリッタ3に反射された前記反射光各々を受光し,その強度を検出する。
尚,本構成において前記集光レンズ13が第1の集光レンズの役割と前記第2の集光レンズとの役割を兼ねている。
以下,前記光学系βの機能について説明する。
前記PC14の制御により,前記光学系βの有する前記LEDアレイ12は,前記LED素子各々から測定光線MLを出力する。前記測定光線MLは,前記集光レンズ13(第1の集光レンズの一例)により集光されつつ前記試料11に照射される。前記測定光線ML各々は前記試料11により反射され(以下,反射された測定光を反射光という),再び前記集光レンズ13(第2の集光レンズの一例)を通過する際に集光される。また,前記反射光各々は前記ビームスプリッタ3に反射され,前記受光素子アレイ9に入射される。
前記受光素子アレイ9(光検出手段の一例)の有する前記受光素子J1,J2…Jnの位置は,前記反射光各々の(複数の)前記集光レンズ13(第2の集光レンズの一例)の焦点位置若しくはその略近傍に定められている。言い換えると,前記受光素子各々の位置と前記像I1,I2…Inの位置とは前記集光レンズ13により共役関係に定められており,前記受光素子は前記集光レンズ13を通過してかつ前記ビームスプリッタ3に反射された前記反射光各々を受光し,その強度を検出する。
尚,本構成において前記集光レンズ13が第1の集光レンズの役割と前記第2の集光レンズとの役割を兼ねている。
前記受光素子アレイ9(光検出手段)の有する受光素子(CCD)各々による前記反射光の強度の検出結果は,前記PC14により設定される取得周期に基づいて電気信号に変換され,該電気信号は前記PC14に入力される。また,前記PC14はその電気信号から前記反射光の強度の測定情報(以下,強度測定情報という)を読み取り,前記受光素子毎の識別情報,読取られた時刻,前記強度測定情報の各々を対応付けて前記メモリ14aに記憶する。前記PC14が光強度取得手段の一例である。
もちろん,前記アクチュエータ15による前記試料設置台10の走査は,前記前記受光素子アレイ9が前記反射光の強度を検出する際に継続して行われる。
前記PC14は,以上のような前記光学系β,前記アクチュエータ15に対する制御を,予め定められた前記試料11の形状測定対象領域の全域に対する前記反射光の強度測定情報が前記メモリ14aに蓄積されるまで継続する。その後前記PC14は,前記メモリ14aに蓄積記憶されている前記強度測定情報に集計処理を施し,前記試料11の形状に換算する。つまり,前記強度測定情報,それに対応付けられた前記受光素子の識別情報,前記時刻情報各々に基づいて,前記走査方向及び該走査方向に直交する深さ方向に沿った平面における前記試料11の表面の軌跡をプロットする。このようなプロットが可能である原理については後述する。これを前記試料11の形状測定結果として,例えば前記PC14に接続されたディスプレイ等に表示させる。
もちろん,前記アクチュエータ15による前記試料設置台10の走査は,前記前記受光素子アレイ9が前記反射光の強度を検出する際に継続して行われる。
前記PC14は,以上のような前記光学系β,前記アクチュエータ15に対する制御を,予め定められた前記試料11の形状測定対象領域の全域に対する前記反射光の強度測定情報が前記メモリ14aに蓄積されるまで継続する。その後前記PC14は,前記メモリ14aに蓄積記憶されている前記強度測定情報に集計処理を施し,前記試料11の形状に換算する。つまり,前記強度測定情報,それに対応付けられた前記受光素子の識別情報,前記時刻情報各々に基づいて,前記走査方向及び該走査方向に直交する深さ方向に沿った平面における前記試料11の表面の軌跡をプロットする。このようなプロットが可能である原理については後述する。これを前記試料11の形状測定結果として,例えば前記PC14に接続されたディスプレイ等に表示させる。
尚,前記PC14(光強度取得手段の一例)より設定され前記受光素子アレイ9が前記反射光を電気信号に変換する取得周期Δt,前記アクチュエータ15(変位手段の一部)による前記試料設置台10の駆動速度(変位速度)V1,及び前記集光レンズ13(第1の集光レンズの一例)により集光される複数の前記測定光線MLの焦点位置(若しくは,像Iの位置)各々の前記走査方向における間隔L1は,以下の式(2)を満たすように前記PC14により設定されている。
Δt×V1=L1 …(2)
尚,左辺は前記試料11における読み取り箇所の間隔(ピッチ)である。このように,前記ピッチを前記間隔L1に相当させることで,前記受光素子各々は前記試料11の同一箇所からの反射光を受光する。
このようにすることで,前記PC14が前記メモリ14aに蓄積記憶された前記強度測定情報の集計処理が,前記受光素子毎の前記強度測定情報を前記読み取りピッチ分だけ変位させるという簡単な処理になり,例えばデータの補完等の余計な作業を行う必要が無い。
尚,上記の式(2)において,右辺が左辺の自然数倍,もしくは自然数分の1である場合にも同様のメリットを発揮する。
Δt×V1=L1 …(2)
尚,左辺は前記試料11における読み取り箇所の間隔(ピッチ)である。このように,前記ピッチを前記間隔L1に相当させることで,前記受光素子各々は前記試料11の同一箇所からの反射光を受光する。
このようにすることで,前記PC14が前記メモリ14aに蓄積記憶された前記強度測定情報の集計処理が,前記受光素子毎の前記強度測定情報を前記読み取りピッチ分だけ変位させるという簡単な処理になり,例えばデータの補完等の余計な作業を行う必要が無い。
尚,上記の式(2)において,右辺が左辺の自然数倍,もしくは自然数分の1である場合にも同様のメリットを発揮する。
図2は,本発明の実施形態に係る形状測定装置Aによる前記試料11の形状測定原理及び方法を詳細に説明するための概念図である。以下,図1を適宜参照しつつ,図2を用いて当該形状測定装置Aによる前記試料11の形状測定原理及び方法について詳述する。
以下,前記試料11のうち特定箇所αに着目する。前記特定箇所αは,ある基準時刻t0において,前記走査方向の位置が前記像Iのうち前記走査方向最上流の像I1と一致しているものとする。言い換えると,前記基準時刻t0において,前記特定点αにおける輝度は前記受光素子のうち前記像I1に対応する前記受光素子J1により検出される状態である。
前記基準時刻t0において前記特定点αの輝度が前記受光素子J1により検出された以降,前記上述の(2)式の成立条件下では,図2(a)に示されるように,前記試料設置台10の走査に伴って,時刻t0+Δtには前記受光素子J2により輝度が検出され,時刻t0+2Δtには受光素子J3に輝度が検出される。このような各受光素子による前記特定点αにおける輝度は前記PC14により集計され,この結果,図2(b)のように単一のピークを有する輝度のグラフが得られる。そのグラフからピークとなった輝度を得た受光素子及び前記像Iのうち対応する像が前記PC14により直ちに判別され,またその像Iに対応する深さも判別される。その深さの判別結果が前記特定点αの深さの測定結果である。
以上のような深さの測定結果を,前記試料11における前記走査方向の任意の箇所について得ることにより,深さの測定結果を前記走査方向にプロットすることが可能となり,これにより前記試料11の断面形状を測定することが可能である。
以下,前記試料11のうち特定箇所αに着目する。前記特定箇所αは,ある基準時刻t0において,前記走査方向の位置が前記像Iのうち前記走査方向最上流の像I1と一致しているものとする。言い換えると,前記基準時刻t0において,前記特定点αにおける輝度は前記受光素子のうち前記像I1に対応する前記受光素子J1により検出される状態である。
前記基準時刻t0において前記特定点αの輝度が前記受光素子J1により検出された以降,前記上述の(2)式の成立条件下では,図2(a)に示されるように,前記試料設置台10の走査に伴って,時刻t0+Δtには前記受光素子J2により輝度が検出され,時刻t0+2Δtには受光素子J3に輝度が検出される。このような各受光素子による前記特定点αにおける輝度は前記PC14により集計され,この結果,図2(b)のように単一のピークを有する輝度のグラフが得られる。そのグラフからピークとなった輝度を得た受光素子及び前記像Iのうち対応する像が前記PC14により直ちに判別され,またその像Iに対応する深さも判別される。その深さの判別結果が前記特定点αの深さの測定結果である。
以上のような深さの測定結果を,前記試料11における前記走査方向の任意の箇所について得ることにより,深さの測定結果を前記走査方向にプロットすることが可能となり,これにより前記試料11の断面形状を測定することが可能である。
以上のように,前記試料11の形状測定の際には,前記試料11が前記走査方向に沿って前記測定光線MLの結像位置を通過しつつ駆動されるため,従来例のように前記試料11の大きさは前記集光レンズ13の幅(径)に限定されない。また,前記集光レンズ13として径が小さく,十分大きな開口率のレンズを用いることが可能であり,前記深さ方向の高い分可能を得ることが可能である。
上述の実施形態では,複数のLED素子からなるLEDアレイ12を用いたが,これに限られるものではなく,従来例のように単一の光源とピンホールアレイを用いて複数の点光源を擬似的に構成しても良い。また,受光素子アレイ9で用いる受光素子はCCDに限られるものではなく,CMOSラインセンサ等を用いることも可能である。また,受光素子として前記反射光の強度のピーク位置及びを判別可能なPSD素子を使用することも可能である。
また,上述の実施例では,前記試料11が設置された試料設置台10が走査されるものとしたが,アクチュエータ15の駆動軸を光学系βに接続し,前記光学系βを前記走査方向に駆動することも考えられる。
また,上述の実施例では,前記試料11が設置された試料設置台10が走査されるものとしたが,アクチュエータ15の駆動軸を光学系βに接続し,前記光学系βを前記走査方向に駆動することも考えられる。
前記試料設置台10(図1参照)若しくは前記光学系βを駆動する際に,その際の走査路を厳密な直線に保つことは困難であるため(所謂,真直度誤差が生じる),反射光の強度の検出結果に誤差が生じることが考えられる。このような場合に対応するものとして,以下のように前記光学系βを2つ並列に設ける(以下,光学系β1,光学系β2と呼び区別する)実施例も考えられる。
片方の前記光学系β1は,形状測定対象の試料11の形状を測定するための光学系である。もう片方の光学系β2(基準光検出手段の一例である受光素子アレイを含む)は,前記光学系β1(光検出手段である受光素子アレイ9を含む)による形状の測定結果の補正に用いられる補正情報を得るための光学系である。
前記光学系β1で形状測定対象の試料11からの反射光の強度情報を得るのと同時に,前記光学系β2の有する受光素子アレイ(基準光検出手段の一例)により,既知の形状を有する基準試料に対する前記反射光の強度を検出する。また,PC14の有するメモリ14aには,前記基準試料の形状が予め入力されている。前記PC14は,前記反射光の検出結果から求められた前記基準試料の形状と,予め記憶されている形状との差分を計算し,その結果を誤差成分とする。
また,前記PC14(検出結果補正手段の一例)は,前記光学系β1により得られた反射光の強度情報に基づく前記試料11の形状測定結果は前記誤差成分を含むものとして,前記形状測定結果から前記誤差成分を除去する(補正の一例)演算を行う。これにより,前記真直度誤差による誤差成分が除去され,形状測定の精度が向上される。
片方の前記光学系β1は,形状測定対象の試料11の形状を測定するための光学系である。もう片方の光学系β2(基準光検出手段の一例である受光素子アレイを含む)は,前記光学系β1(光検出手段である受光素子アレイ9を含む)による形状の測定結果の補正に用いられる補正情報を得るための光学系である。
前記光学系β1で形状測定対象の試料11からの反射光の強度情報を得るのと同時に,前記光学系β2の有する受光素子アレイ(基準光検出手段の一例)により,既知の形状を有する基準試料に対する前記反射光の強度を検出する。また,PC14の有するメモリ14aには,前記基準試料の形状が予め入力されている。前記PC14は,前記反射光の検出結果から求められた前記基準試料の形状と,予め記憶されている形状との差分を計算し,その結果を誤差成分とする。
また,前記PC14(検出結果補正手段の一例)は,前記光学系β1により得られた反射光の強度情報に基づく前記試料11の形状測定結果は前記誤差成分を含むものとして,前記形状測定結果から前記誤差成分を除去する(補正の一例)演算を行う。これにより,前記真直度誤差による誤差成分が除去され,形状測定の精度が向上される。
1…光源
2…レンズ
3…ビームスプリッタ
4…ピンホールアレイ
5…レンズ
6…走査ミラー
7…結像レンズ
8…集光レンズ
9…受光素子アレイ(光検出手段の一例)
10…試料設置台
11…試料(被測定物)
12…LEDアレイ
13…集光レンズ(第1の集光レンズ,第2の集光レンズの一例)
14…PC
15…アクチュエータ
2…レンズ
3…ビームスプリッタ
4…ピンホールアレイ
5…レンズ
6…走査ミラー
7…結像レンズ
8…集光レンズ
9…受光素子アレイ(光検出手段の一例)
10…試料設置台
11…試料(被測定物)
12…LEDアレイ
13…集光レンズ(第1の集光レンズ,第2の集光レンズの一例)
14…PC
15…アクチュエータ
Claims (6)
- 被測定物に測定光を照射し,その反射光に基づいて前記被測定物の形状を測定する際に用いられる形状測定装置であって,
所定の基準平面に沿って前記被測定物に対向配置された第1の集光レンズと,
前記基準平面からの距離が各々異なる複数の出射位置から複数の前記測定光を前記第1の集光レンズに向けて出射する測定光出射手段と,
前記第1の集光レンズを通過して前記被測定物に照射された前記複数の測定光の反射光を集光する第2の集光レンズと,
前記第2の集光レンズを通過して集光される前記反射光の強度を検出する光検出手段と,
前記第1の集光レンズ,前記第2の集光レンズ,前記測定光出射手段及び前記光検出手段をそれら相互の位置関係を保持して支持する光学系支持手段と,
前記光学系支持手段と前記被測定物との前記基準平面に略平行な方向における相対位置を変位させる変位手段と,
を具備してなることを特徴とする形状測定装置。 - 前記光検出手段が,前記第2の集光レンズによる焦点付近において前記反射光の強度を検出するものである請求項1に記載の形状測定装置。
- 前記第1の集光レンズと前記第2の集光レンズとが同一のレンズからなるものである請求項1又は2のいずれかに記載の形状測定装置。
- 前記変位手段により前記光学系支持手段と前記被測定物との相対位置が所定速度で変位中に前記光検出手段の検出結果を所定の取得周期で取得する光強度取得手段を具備し,
前記第1の集光レンズにより集光される複数の前記測定光の焦点位置各々の前記相対位置の変位方向における間隔と,前記変位手段による変位速度及び前記光強度取得手段の前記取得周期の積とが,その一方が他方の自然数倍となる関係である請求項1〜3のいずれかに記載の形状測定装置。 - 既知の形状を有する所定の試料に対する前記反射光の強度を検出する基準光検出手段と,
前記基準光検出手段による検出結果に基づいて前記光検出手段による検出結果を補正する検出結果補正手段と,
を具備してなる請求項1〜4のいずれかに記載の形状測定装置。 - 被測定物に測定光を照射し,その反射光に基づいて前記被測定物の形状を測定する形状測定方法であって,
所定の基準平面からの距離が各々異なる複数の出射位置から複数の前記測定光を,前記基準平面に沿って前記被測定物に対向配置された第1の集光レンズに向けて出射する測定光出射工程と,
前記第1の集光レンズを通過して前記被測定物に照射された前記複数の測定光の反射光を集光するレンズである第2の集光レンズを通過して集光される前記反射光の強度を検出する光検出工程と,
を有し,
前記測定光出射工程及び前記光検出工程の際に,
前記第1の集光レンズ,前記第2の集光レンズ,前記測定光出射工程において前記測定光を出射する測定光出射手段及び前記光検出工程において前記反射光の強度を検出する光検出手段を有してかつそれらの相対位置関係が保持された光学系と,前記被測定物と,の前記基準平面に略平行な方向における相対位置を変位させることを特徴とする形状測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005350378A JP2007155472A (ja) | 2005-12-05 | 2005-12-05 | 形状測定装置,形状測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005350378A JP2007155472A (ja) | 2005-12-05 | 2005-12-05 | 形状測定装置,形状測定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007155472A true JP2007155472A (ja) | 2007-06-21 |
Family
ID=38240048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005350378A Pending JP2007155472A (ja) | 2005-12-05 | 2005-12-05 | 形状測定装置,形状測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007155472A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009031169A (ja) * | 2007-07-28 | 2009-02-12 | Nikon Corp | 位置検出装置、露光装置、及びデバイスの製造方法 |
| JP2012132740A (ja) * | 2010-12-21 | 2012-07-12 | Ricoh Co Ltd | 光学センサ及び画像形成装置 |
| JP2013007645A (ja) * | 2011-06-24 | 2013-01-10 | Nikon Corp | 測定装置、形状測定装置、形状測定方法、及び構造物の製造方法 |
-
2005
- 2005-12-05 JP JP2005350378A patent/JP2007155472A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009031169A (ja) * | 2007-07-28 | 2009-02-12 | Nikon Corp | 位置検出装置、露光装置、及びデバイスの製造方法 |
| JP2012132740A (ja) * | 2010-12-21 | 2012-07-12 | Ricoh Co Ltd | 光学センサ及び画像形成装置 |
| JP2013007645A (ja) * | 2011-06-24 | 2013-01-10 | Nikon Corp | 測定装置、形状測定装置、形状測定方法、及び構造物の製造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6553631B2 (ja) | 光シート顕微鏡検査のための方法および装置 | |
| US10007100B2 (en) | Light sheet illumination microscope and light sheet illumination method | |
| US7726573B2 (en) | Compact autofocus bar code reader with moving mirror | |
| JP6662529B2 (ja) | 光学機器の連続非同期オートフォーカスのためのシステムおよび方法 | |
| CN104515469A (zh) | 用于检查微观样本的光显微镜和显微镜学方法 | |
| JPWO2019017243A1 (ja) | 光学装置 | |
| JP2019120506A (ja) | 検出方法、検査方法、検出装置及び検査装置 | |
| JP6087792B2 (ja) | 形状測定装置 | |
| JP6552043B2 (ja) | シート照明顕微鏡 | |
| KR101745797B1 (ko) | 광학 현미경 장치 | |
| JP2015108582A (ja) | 3次元計測方法と装置 | |
| JP2007155472A (ja) | 形状測定装置,形状測定方法 | |
| JPH11173821A (ja) | 光学式検査装置 | |
| JP6524357B1 (ja) | 波面センサ、波面計測装置および波面計測方法 | |
| JP2013088570A (ja) | 顕微鏡装置 | |
| JP2001165625A (ja) | 高さ測定装置、焦点検出装置、焦点検出ユニット、および、合焦機能を備えた光学装置 | |
| KR101391837B1 (ko) | 웨이퍼의 워프(Warp) 인스펙션 장치 | |
| JP2000509825A (ja) | 光走査デバイス | |
| JP6519860B2 (ja) | 非接触形状測定装置及び走査レンズ収差補正方法 | |
| JP2009042128A (ja) | 高さ測定装置 | |
| JP2006118944A (ja) | レンズの評価装置 | |
| JP2021105603A (ja) | 光学的な位置測定装置 | |
| JP4834363B2 (ja) | 表面検査装置 | |
| KR102772833B1 (ko) | 초점 거리 측정 장치 및 방법 | |
| US12007545B2 (en) | Light sheet microscope and method for light sheet microscopy |