JP2007176307A - 車両の衝突位置検出装置 - Google Patents
車両の衝突位置検出装置 Download PDFInfo
- Publication number
- JP2007176307A JP2007176307A JP2005376902A JP2005376902A JP2007176307A JP 2007176307 A JP2007176307 A JP 2007176307A JP 2005376902 A JP2005376902 A JP 2005376902A JP 2005376902 A JP2005376902 A JP 2005376902A JP 2007176307 A JP2007176307 A JP 2007176307A
- Authority
- JP
- Japan
- Prior art keywords
- collision
- vehicle
- impact force
- input position
- detection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
- Air Bags (AREA)
Abstract
【課題】 衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる車両の衝突位置検出装置を提供すること。
【解決手段】 衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサ501,502,503を備え、前記少なくとも3個の衝突センサ501,502,503は、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、衝突時、前記少なくとも3個の衝突センサ501,502,503からの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段(ステップS2)を設けた。
【選択図】 図2
【解決手段】 衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサ501,502,503を備え、前記少なくとも3個の衝突センサ501,502,503は、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、衝突時、前記少なくとも3個の衝突センサ501,502,503からの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段(ステップS2)を設けた。
【選択図】 図2
Description
本発明は、衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置の技術分野に属する。
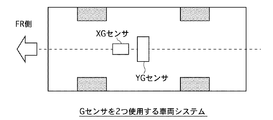
従来、車両の前後方向の減速度を検出するXGセンサと、車両の左右方向の減速度を検出するYGセンサと、を備え、衝突時、XGセンサからの出力信号を時間について積分し、前後方向の減速度ベクトルを演算し、また、YGセンサからの出力信号を時間について積分し、左右方向の減速度ベクトルを演算し、前後方向の減速度ベクトルと左右方向の減速度ベクトルとの合力ベクトルを求め、衝突の大きさと方向を特定するものが知られている(例えば、特許文献1参照。)。
特開平5−193439号公報
しかしながら、従来の車両の衝突方向検出装置にあっては、XGセンサとYGセンサからの出力信号を時間について積分演算処理を必要とするものであるため、演算量が多く、演算時間が長くなってしまい、演算時間を短時間に設定すれば衝突方向の検出精度が低くなるし、演算時間を長時間に設定すれば衝突方向を特定するまでに時間がかかってしまい、衝突方向情報に基づいて作動するエアバック等の展開タイミングが遅れてしまう、という問題があった。
本発明は、上記問題に着目してなされたもので、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる車両の衝突位置検出装置を提供することを目的とする。
上記目的を達成するため、本発明では、衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、
自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサを備え、
前記少なくとも3個の衝突センサは、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、
自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサを備え、
前記少なくとも3個の衝突センサは、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、
衝突時、前記少なくとも3個の衝突センサからの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段を設けたことを特徴とする。
よって、本発明の車両の衝突位置検出装置にあっては、少なくとも3個の衝突センサが、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置される。そして、衝突時、衝撃入力位置特定手段において、少なくとも3個の衝突センサからの衝撃力の検出順序により自車への衝撃力の入力位置が特定される。
すなわち、自車への衝撃力の入力位置を特定するにあたって、衝突センサからの衝撃力の検出順序を用いた判別処理によるものであるため、積分演算等による演算処理時間を要さず、例えば、3個の衝突センサを配置した場合、2個目の衝突センサによる衝撃力の検出開始時点で3個の衝撃センサの検出順序が決定され、入力位置を特定することが可能である。したがって、衝突時、自車に対する衝撃力の入力位置が応答良く検出される。
例えば、前後方向の減速度ベクトルと左右方向の減速度ベクトルとの合力ベクトルにより衝突方向を検出する場合、2つのベクトルが確定するまでは検出される衝突方向がふらつき、応答良く衝突方向を検出しようとすると、衝突方向の検出精度が低くなる。
これに対し、本発明では、自車への衝撃力の入力位置を特定するにあたって、衝突センサからの衝撃力の検出順序により衝撃力の入力位置を特定するため、検出順序が確定した時点で衝撃力の入力位置を分けられた1つ領域に特定することができる。したがって、衝突時、自車に対する衝撃力の入力位置が精度良く検出される。
この結果、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる。
すなわち、自車への衝撃力の入力位置を特定するにあたって、衝突センサからの衝撃力の検出順序を用いた判別処理によるものであるため、積分演算等による演算処理時間を要さず、例えば、3個の衝突センサを配置した場合、2個目の衝突センサによる衝撃力の検出開始時点で3個の衝撃センサの検出順序が決定され、入力位置を特定することが可能である。したがって、衝突時、自車に対する衝撃力の入力位置が応答良く検出される。
例えば、前後方向の減速度ベクトルと左右方向の減速度ベクトルとの合力ベクトルにより衝突方向を検出する場合、2つのベクトルが確定するまでは検出される衝突方向がふらつき、応答良く衝突方向を検出しようとすると、衝突方向の検出精度が低くなる。
これに対し、本発明では、自車への衝撃力の入力位置を特定するにあたって、衝突センサからの衝撃力の検出順序により衝撃力の入力位置を特定するため、検出順序が確定した時点で衝撃力の入力位置を分けられた1つ領域に特定することができる。したがって、衝突時、自車に対する衝撃力の入力位置が精度良く検出される。
この結果、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる。
以下、本発明の車両の衝突位置検出装置を実施するための最良の形態を、図面に示す実施例1に基づいて説明する。
まず、構成を説明する。
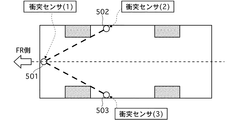
図1は実施例1の衝突位置検出装置が適用されたハイブリッド車両(車両の一例)を示す全体システム図、図2は実施例1の衝突位置検出装置における3個の衝突センサの車両への設定位置を示す配置レイアウト図である。
図1は実施例1の衝突位置検出装置が適用されたハイブリッド車両(車両の一例)を示す全体システム図、図2は実施例1の衝突位置検出装置における3個の衝突センサの車両への設定位置を示す配置レイアウト図である。
実施例1のハイブリッド車両は、図1に示すように、CPU101と、補助バッテリ102と、ブレーキアクチュエータ201と、機械ブレーキ202と、強電バッテリ301と、インバータ302と、モータ303と、発電機304と、エンジン305と、動力分割機構306と、アクセルセンサ401と、ブレーキセンサ402と、DC/DCコンバータ403と、前方衝突センサ501(第1衝突センサ)と、右側方衝突センサ502(第2衝突センサ)と、左側方衝突センサ503(第3衝突センサ)と、ヨーレートセンサ504(車両挙動検出手段)と、乗員保護装置505と、GPS601と、外部発信器602と、を備えている。
前記CPU101は、強電バッテリ301をモニタし、SOCや温度や劣化状態に応じて入出力可能電力量を算出し、これを基にインバータ302を制御することにより、モータ303(フロント駆動用)と発電機304を動作させると共に、エンジン305を制御する(モータ−エンジン間の駆動力配分含む)。
また、CPU101は、モータ303による回生制動力を考慮し、機械ブレーキ202により発生する制動力演算指令値(前後制動力配分を含む)をブレーキアクチュエータ201へと送信する。
前記前方衝突センサ501と、前記右側方衝突センサ502と、前記左側方衝突センサ503の検出順序を確認し、2つのセンサ間の検出タイミングのずれ量(位相差)の大小を比較することにより、衝突時、衝撃力の車体入力位置を特定する。
上記衝撃力の入力位置情報に、GPS601により検出した事故箇所を加え、外部発信器602により、消防署などのレスキュー部隊へ情報を送信する。
なお、自車速度は、モータ303の回転数により把握することを基本とする。
また、CPU101は、モータ303による回生制動力を考慮し、機械ブレーキ202により発生する制動力演算指令値(前後制動力配分を含む)をブレーキアクチュエータ201へと送信する。
前記前方衝突センサ501と、前記右側方衝突センサ502と、前記左側方衝突センサ503の検出順序を確認し、2つのセンサ間の検出タイミングのずれ量(位相差)の大小を比較することにより、衝突時、衝撃力の車体入力位置を特定する。
上記衝撃力の入力位置情報に、GPS601により検出した事故箇所を加え、外部発信器602により、消防署などのレスキュー部隊へ情報を送信する。
なお、自車速度は、モータ303の回転数により把握することを基本とする。
前記補助バッテリ102は、CPU101の動作電源を提供する役目を有する。本システムでは、強電バッテリ301を電源としたDC/DCコンバータ403により電力を供給することとする。
前記ブレーキアクチュエータ201は、CPU101により演算された機械ブレーキ202で発生させるべき摩擦制動力演算指令値を受信し、それに応じ、機械ブレーキ202に対し必要な油圧をかける。
前記機械ブレーキ202は、ブレーキアクチュエータ201により発生された油圧に応じ、制動力を発生させる。
前記強電バッテリ301は、モータ303に対し、インバータ302を経由して電力を供給することで車両走行をアシストすると共に、モータ303及び発電機304が発電した電力をインバータ302を経由して回収する役目を有する。
前記インバータ302は、CPU101により直接制御されている。エンジン305の発生トルク及び回転数に応じて強電バッテリ301の電気エネルギーをモータ303へ供給すること、及び発電機304を動作させて発生した電気エネルギーを強電バッテリ301へと戻す役目を有する。なお、モータ303と発電機304とエンジン305は、遊星歯車機構(動力分割機構306に内蔵)に直結しているため、トルク及び回転数のバランスを保つように制御しないと車両を正常に作動させることができない。
前記モータ303は、車速が低い場合は単独で駆動トルクを発生させる。また、車速が高い場合は、エンジン305の駆動トルクをアシストしている。さらに、減速時は発電作用(回生制動)することにより電気エネルギーを発生させ、これをインバータ302を経由して強電バッテリ301へ戻す役目を有する。
前記発電機304は、ハイブリッド電気自動車は基本的にスタータを持たない。本システムを適用した車両始動時は、強電バッテリ301から電力を供給し、モータとして動作することでエンジン305の始動をサポートする。通常走行時は、モータ303とエンジン305とをバランスさせることで電気エネルギーを発生(発電)し、これを強電バッテリ301へ戻す。時には直接、モータ303へ供給することにより、急激な加速に対応することも可能である。
前記エンジン305は、CPU101により直接制御されている。具体的には、車速が高い場合、車両駆動のためにトルクを発生させている(車速が低い場合はモータ走行となるため、制御不要:強いて挙げれば起動させない制御を適用している)。
前記動力分割機構306は、遊星歯車機構を有し、キャリアにはエンジン305、リングギヤにはモータ303、サンギヤには発電機304が直接接続している。従来システムのトランスミッション相当も内部に構成されている。
前記アクセルセンサ401は、ドライバーが加速時に踏み込んだアクセルペダルストローク量をCPU101へ送信する。
前記ブレーキセンサ402は、ドライバーが減速時時に踏み込んだブレーキペダルストローク量をCPU101へ送信する。
前記DC/DCコンバータ403は、強電バッテリ301からのエネルギーを12Vへと変換し、補助バッテリ102へと供給する。すなわち、従来のエンジン車両におけるオルタネータと同様の機能を有する。
前記前方衝突センサ501と右側方衝突センサ502と左側方衝突センサ503は、図2に示すように、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置している(図4参照)。
前記前方衝突センサ501は、車両フロントの中央位置に配置し、主に前方からの衝撃を検出するために使用される。
前記右側方衝突センサ502は、車両中央部の右側位置に配置し、主に右側方からの衝撃を検出するために使用される。
前記左側方衝突センサ503は、車両中央部の左側位置に配置し、主に左側方からの衝撃を検出するために使用される。
これらの衝突センサ501,502,503としては、加減速を検出するような精度の高いGセンサを要さないことで、例えば、エアバックシステムで用いられる作動スイッチのような、自車への所定値以上の衝撃力の入力に対しパルス信号を出力するオン/オフスイッチが用いられる。
前記前方衝突センサ501は、車両フロントの中央位置に配置し、主に前方からの衝撃を検出するために使用される。
前記右側方衝突センサ502は、車両中央部の右側位置に配置し、主に右側方からの衝撃を検出するために使用される。
前記左側方衝突センサ503は、車両中央部の左側位置に配置し、主に左側方からの衝撃を検出するために使用される。
これらの衝突センサ501,502,503としては、加減速を検出するような精度の高いGセンサを要さないことで、例えば、エアバックシステムで用いられる作動スイッチのような、自車への所定値以上の衝撃力の入力に対しパルス信号を出力するオン/オフスイッチが用いられる。
前記ヨーレートセンサ504は、前記前方衝突センサ501と右側方衝突センサ502と左側方衝突センサ503により検出された衝突信号と、事故によるヨーモーメント発生状況を照合し、情報の精度を高めるために活用される。また、検出値により衝突後の車両挙動に付いても把握し、外部レスキュー部隊へと情報展開できるようにする。
前記乗員保護装置505は、エアバック、プリクラッシュシートベルトなど、衝突時に乗員への衝撃を低減させるアイテムの全てを示す。
実施例1では、乗員保護装置505として、運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDが搭載されている(図8(b)を参照)。
実施例1では、乗員保護装置505として、運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDが搭載されている(図8(b)を参照)。
前記GPS601(Global Positioning System)は、実施例1のシステムにおいて、事故現場を特定する際に活用する。
前記外部発信器602は、事故現場、事故状態(衝突方法、検出ダイアグ)などをまとめ、消防署などのレスキュー部隊へと情報送信し、レスキュー作業の効率化を図る。
図3は実施例1のCPU101にて実行される衝撃入力位置特定処理、エアバック作動制御処理、事故情報発信処理の流れを示すフローチャートであり、以下、各ステップについて説明する。
ステップS1では、前方衝突センサ501と右側方衝突センサ502と左側方衝突センサ503の何れかにより衝突センサ信号を受信したか否かを判断し、Yesの場合はステップS2へ移行し、Noの場合はステップS1の判断を繰り返す。
ステップS2では、ステップS1での衝突センサ信号の受信という判断に続き、2つ目のセンサ信号を入力した時点で3個の前方衝突センサ501と右側方衝突センサ502と左側方衝突センサ503からの衝撃力の検出順序を確認し、確認した検出順序により自車への衝撃力の入力位置(領域にてあらわされる)を特定し、ステップS3へ移行する(衝撃入力位置特定手段)。
ここで、センサ検出順序による入力位置は、図4に示すように、前方衝突センサ501を(1)、右側方衝突センサ502を(2)、左側方衝突センサ503を(3)であらわしたとき、下記のように特定される。
まず、車両全周の衝撃入力位置を、選択した2個の衝突センサ(2),(3)と等距離にある車両周上位置P1,P2と、選択した2個の衝突センサ(1),(2)と等距離にある車両周上位置P3,P4と、選択した2個の衝突センサ(1),(3)と等距離にある車両周上位置P5,P6と、を境として6つの領域に分ける。
このとき、P1〜P3の右前方領域FRでは、(1)→(2)→(3)の検出順序となり、P1〜P4の左前方領域FLでは、(1)→(3)→(2)の検出順序となる。
P3〜P5の右側方領域SRでは、(2)→(1)→(3)の検出順序となり、P2〜P5の右後方領域RRでは、(2)→(3)→(1)の検出順序となる。
P4〜P6の左側方領域SLでは、(3)→(1)→(2)の検出順序となり、P2〜P6の左後方領域RLでは、(3)→(2)→(1)の検出順序となる。
そして、車両周上位置P1では、(1)→(2),(3)の検出順序となり、車両周上位置P2では、(2),(3)→(1)の検出順序となり、車両周上位置P3では、(1),(2)→(3)の検出順序となり、車両周上位置P4では、(1),(3)→(2)の検出順序となり、車両周上位置P5では、(2)→(1),(3)の検出順序となり、車両周上位置P6では、(3)→(1),(2)の検出順序となる。
ここで、センサ検出順序による入力位置は、図4に示すように、前方衝突センサ501を(1)、右側方衝突センサ502を(2)、左側方衝突センサ503を(3)であらわしたとき、下記のように特定される。
まず、車両全周の衝撃入力位置を、選択した2個の衝突センサ(2),(3)と等距離にある車両周上位置P1,P2と、選択した2個の衝突センサ(1),(2)と等距離にある車両周上位置P3,P4と、選択した2個の衝突センサ(1),(3)と等距離にある車両周上位置P5,P6と、を境として6つの領域に分ける。
このとき、P1〜P3の右前方領域FRでは、(1)→(2)→(3)の検出順序となり、P1〜P4の左前方領域FLでは、(1)→(3)→(2)の検出順序となる。
P3〜P5の右側方領域SRでは、(2)→(1)→(3)の検出順序となり、P2〜P5の右後方領域RRでは、(2)→(3)→(1)の検出順序となる。
P4〜P6の左側方領域SLでは、(3)→(1)→(2)の検出順序となり、P2〜P6の左後方領域RLでは、(3)→(2)→(1)の検出順序となる。
そして、車両周上位置P1では、(1)→(2),(3)の検出順序となり、車両周上位置P2では、(2),(3)→(1)の検出順序となり、車両周上位置P3では、(1),(2)→(3)の検出順序となり、車両周上位置P4では、(1),(3)→(2)の検出順序となり、車両周上位置P5では、(2)→(1),(3)の検出順序となり、車両周上位置P6では、(3)→(1),(2)の検出順序となる。
ステップS3では、ステップS2での検出順序確認に続き、3つ目のセンサ信号を入力した時点でステップS2で決めた入力存在領域にてセンサ間の検出タイミングのずれ量である位相差により自車への衝撃力の入力位置を特定し、ステップS4へ移行する(衝撃入力位置特定手段)。
ここで、検出順序による領域特定(6領域)をさらに細分化して特定(12領域)するのが位相差による入力位置の特定であり、図5〜図7に示す入力位置特定マップにより、図8に示す領域I〜IXのいずれかが特定される。
すなわち、衝突センサ(1)がはじめに検出した場合、図5に示すように、P1〜P3の右前方領域FRでは、(2)→(3)の位相差の大小により、図8に示す領域Iと領域IIと領域IXとに特定される。P1〜P4の左前方領域FLでは、(3)→(2)の位相差の大小により、図8に示す領域Iと領域IIIと領域IVとに特定される。
衝突センサ(2)がはじめに検出した場合、図6に示すように、P3〜P5の右側方領域SRでは、(1)→(3)の位相差の大小により、図8に示す領域Iと領域IIと領域IXとに特定される。P2〜P5の右後方領域RRでは、(3)→(1)の位相差の大小により、図8に示す領域Iと領域VIIと領域VIIIとに特定される。
衝突センサ(3)がはじめに検出した場合、図7に示すように、P4〜P6の左側方領域SLでは、(1)→(2)の位相差の大小により、図8に示す領域Iと領域IIIと領域IVとに特定される。P2〜P6の左後方領域RLでは、(2)→(1)の位相差の大小により、図8に示す領域Iと領域VIと領域Vとに特定される。
ここで、検出順序による領域特定(6領域)をさらに細分化して特定(12領域)するのが位相差による入力位置の特定であり、図5〜図7に示す入力位置特定マップにより、図8に示す領域I〜IXのいずれかが特定される。
すなわち、衝突センサ(1)がはじめに検出した場合、図5に示すように、P1〜P3の右前方領域FRでは、(2)→(3)の位相差の大小により、図8に示す領域Iと領域IIと領域IXとに特定される。P1〜P4の左前方領域FLでは、(3)→(2)の位相差の大小により、図8に示す領域Iと領域IIIと領域IVとに特定される。
衝突センサ(2)がはじめに検出した場合、図6に示すように、P3〜P5の右側方領域SRでは、(1)→(3)の位相差の大小により、図8に示す領域Iと領域IIと領域IXとに特定される。P2〜P5の右後方領域RRでは、(3)→(1)の位相差の大小により、図8に示す領域Iと領域VIIと領域VIIIとに特定される。
衝突センサ(3)がはじめに検出した場合、図7に示すように、P4〜P6の左側方領域SLでは、(1)→(2)の位相差の大小により、図8に示す領域Iと領域IIIと領域IVとに特定される。P2〜P6の左後方領域RLでは、(2)→(1)の位相差の大小により、図8に示す領域Iと領域VIと領域Vとに特定される。
ステップS4では、ステップS3での入力位置の特定に続き、特定された入力位置に応じて乗員保護装置505である運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDの作動タイミングを決定し、ステップS5へ移行する。
ここで、エアバックA,B,C,Dの作動タイミングは、図8に示す各領域毎に下記のように決定される。
領域I :A=B=C=D
領域II :A⇒B⇒D⇒C
領域III :B⇒A⇒C⇒D
領域IV :D⇒C⇒A=B
領域V :D⇒C⇒A=B(=領域IV)
領域VI :A=B⇒C=D
領域VII :A=B⇒C=D(=領域VI)
領域VIII:C⇒D⇒A=B
領域IX :C⇒D⇒A=B(=領域VIII)
すなわち、車両のコーナー側へのオフセット衝突の場合は、エアバックを同時展開とするが、基本的に、特定された入力位置に近い位置のエアバックの展開を優先する展開順序により作動タイミングが設定される。
ここで、エアバックA,B,C,Dの作動タイミングは、図8に示す各領域毎に下記のように決定される。
領域I :A=B=C=D
領域II :A⇒B⇒D⇒C
領域III :B⇒A⇒C⇒D
領域IV :D⇒C⇒A=B
領域V :D⇒C⇒A=B(=領域IV)
領域VI :A=B⇒C=D
領域VII :A=B⇒C=D(=領域VI)
領域VIII:C⇒D⇒A=B
領域IX :C⇒D⇒A=B(=領域VIII)
すなわち、車両のコーナー側へのオフセット衝突の場合は、エアバックを同時展開とするが、基本的に、特定された入力位置に近い位置のエアバックの展開を優先する展開順序により作動タイミングが設定される。
ステップS5では、ステップS4での乗員保護装置作動タイミングの決定に続き、決定されたタイミングにて4個のエアバックA,B,C,Dの作動を制御し、ステップS6へ移行する。なお、ステップS4及びステップS5は、乗員保護装置作動制御手段に相当する。
ステップS6では、ステップS5での乗員保護装置の作動に続き、モータ303の回転数を確認し、回転数がゼロ、つまり、車速がゼロ(=衝突が終了)となったか否かを判断し、Yesの場合はステップS7へ移行し、Noの場合はステップS6での判断を繰り返す。
ステップS7では、ステップS6での車速ゼロとの判断に続き、衝突開始時から衝突完了までのヨーレートセンサ504による車両挙動検出結果に基づき、衝撃力の大きさ(事故の程度)を把握し、ステップS8へ移行する。
ステップS8では、ステップS7での衝突後挙動確認に続き、GPS601からの情報と照合し、事故の発生場所及び事故後の車両が存在する場所を特定し、ステップS9へ移行する(事故位置特定手段)。なお、事故発生場所は、ログファイルの確認により特定することができる。
ステップS9では、ステップS8での事故位置確認に続き、衝突程度を切り分けられるダイアグ確認方法(自己診断コードの確認方法)に基づき、自車システムのダイアグ発生状況を確認し、ステップS10へ移行する(ダイアグ確認手段)。
ステップS10では、ステップS9でのダイアグ確認に続き、ダイアグ発生状況と事故位置を含む事故情報を整理し、外部発信器602を用いて外部レスキュー部隊へと発信し、終了へ移行する(事故情報発信手段)。
次に、作用を説明する。
[背景技術]
衝突時の乗員の安全性を確保する観点から乗員保護装置として、複数のエアバックやプリクラッシュシートベルトなどが車両に採用されている。しかし、例えば、衝突方向がどの方向であるかにかかわらず衝突時に複数のエアバックを同時タイミングで作動させるようにした場合、衝突方向によってはエアバックの同時展開が必ずしも適切であるとは限らない。このように、複数のエアバックの展開順序を適切に規定するため、衝突方向の情報を得たいという要求がある。
[背景技術]
衝突時の乗員の安全性を確保する観点から乗員保護装置として、複数のエアバックやプリクラッシュシートベルトなどが車両に採用されている。しかし、例えば、衝突方向がどの方向であるかにかかわらず衝突時に複数のエアバックを同時タイミングで作動させるようにした場合、衝突方向によってはエアバックの同時展開が必ずしも適切であるとは限らない。このように、複数のエアバックの展開順序を適切に規定するため、衝突方向の情報を得たいという要求がある。
これに対し、特開平5−193439号公報には、図9に示すように、車両の前後方向の減速度を検出するXGセンサと、車両の左右方向の減速度を検出するYGセンサと、を備え、衝突時、XGセンサからの出力信号を時間について積分し、前後方向の減速度ベクトルを演算し、また、YGセンサからの出力信号を時間について積分し、左右方向の減速度ベクトルを演算し、前後方向の減速度ベクトルと左右方向の減速度ベクトルとの合力ベクトルを求め、衝突の大きさと方向を特定するものが記載されている。
しかしながら、上記衝突方向検出装置にあっては、XGセンサとYGセンサからの出力信号を時間について積分演算処理を必要とするものであるため、図10に示すように、衝突方向を特定するためのベクトル計算に長い時間を要し、衝突方向を特定するまでに時間がかかってしまう。
このため、エアバックシステムに上記衝突方向検出装置を採用し、十分な演算処理時間を待って衝突方向を特定した場合、複数のエアバックの展開順序を規定すると、エアバックの展開タイミングが遅れてしまう。このため、例えば、図10に示すように、同時タイミングによるエアバックの展開作動にせざるを得ない。
また、演算処理時間を短くして応答良く衝突方向を特定すれば、衝突方向の検出精度が低くなり、衝突方向を確認できず、複数のエアバックの展開順序を適切に規定できない。
また、演算処理時間を短くして応答良く衝突方向を特定すれば、衝突方向の検出精度が低くなり、衝突方向を確認できず、複数のエアバックの展開順序を適切に規定できない。
[衝突時の衝撃力の入力位置特定作用]
これに対し、実施例1の衝突位置検出装置では、少なくとも3個以上の衝突センサを適切に車両に配置し、積分演算処理などを用いず、位置検出手法として迅速なセンサ検出順序の判別処理を採用することで、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができるようにした。
これに対し、実施例1の衝突位置検出装置では、少なくとも3個以上の衝突センサを適切に車両に配置し、積分演算処理などを用いず、位置検出手法として迅速なセンサ検出順序の判別処理を採用することで、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができるようにした。
すなわち、衝突時には、図3のフローチャートにおいて、ステップS1→ステップS2→ステップS3へと進み、ステップS2では、ステップS1での衝突センサ信号の受信という判断に続き、2つ目のセンサ信号を入力した時点で3個の衝突センサ501,502,503からの衝撃力の検出順序を確認し、確認した検出順序により自車への衝撃力の入力位置を特定する。
例えば、図11に示すように、時刻t1にて前方衝突センサ501(1)を検出し、時刻t2にて右側方衝突センサ502(2)を検出し、時刻t3にて左側方衝突センサ503(3)を検出した場合、(1)→(2)→(3)の検出順序であるため、図4に示すように、自車への衝撃力の入力位置がP1〜P3の右前方領域FRであると特定される。
例えば、図11に示すように、時刻t1にて前方衝突センサ501(1)を検出し、時刻t2にて右側方衝突センサ502(2)を検出し、時刻t3にて左側方衝突センサ503(3)を検出した場合、(1)→(2)→(3)の検出順序であるため、図4に示すように、自車への衝撃力の入力位置がP1〜P3の右前方領域FRであると特定される。
そして、ステップS3では、ステップS2での検出順序確認に続き、3つ目のセンサ信号を入力した時点でステップS2で決めた入力存在領域にてセンサ間の検出タイミングのずれ量である位相差により自車への衝撃力の入力位置を特定する。
例えば、図11に示すように、P1〜P3の右前方領域FRで、かつ、衝突センサ(1)がはじめに検出した場合、図5に示すように、(2)→(3)の位相差Δtの大小により、図8に示す領域IIに特定される。
例えば、図11に示すように、P1〜P3の右前方領域FRで、かつ、衝突センサ(1)がはじめに検出した場合、図5に示すように、(2)→(3)の位相差Δtの大小により、図8に示す領域IIに特定される。
このように、自車への衝撃力の入力位置を特定するにあたって、衝突センサ(1),(2),(3)からの衝撃力の検出順序を用いた判別処理によるものであるため、積分演算等による演算処理時間を要さず、実施例1のように、3個の衝突センサ(1),(2),(3)を配置した場合、2個目の衝突センサによる衝撃力の検出開始時点で3個の衝撃センサの検出順序が決定され、入力位置を特定することが可能である。したがって、衝突時、自車に対する衝撃力の入力位置が応答良く検出される。
例えば、従来技術のように、前後方向の減速度ベクトルと左右方向の減速度ベクトルとの合力ベクトルにより衝突方向を検出する場合、2つのベクトルが確定するまでは検出される衝突方向がふらつき、応答良く衝突方向を検出しようとすると、衝突方向の検出精度が低くなる。
これに対し、実施例1では、自車への衝撃力の入力位置を特定するにあたって、衝突センサ(1),(2),(3)からの衝撃力の検出順序により衝撃力の入力位置を特定するため、検出順序が確定した時点で衝撃力の入力位置を、分けられた6領域の中から1つの領域に特定することができる。
これに対し、実施例1では、自車への衝撃力の入力位置を特定するにあたって、衝突センサ(1),(2),(3)からの衝撃力の検出順序により衝撃力の入力位置を特定するため、検出順序が確定した時点で衝撃力の入力位置を、分けられた6領域の中から1つの領域に特定することができる。
さらに、実施例1では、自車への衝撃力の入力位置を特定するにあたって、衝突センサ(1),(2),(3)からの衝撃力の検出順序により衝撃入力位置の存在領域(6領域のうち1領域)を決め、かつ、決めた存在領域にて位相差により衝撃力の入力位置を特定(12領域のうち1領域)するというように、「入力位置の存在領域決定」と「存在領域内での入力位置の細分特定」という2段階絞りによる入力位置検出手法を採用したため、衝突時、自車に対する衝撃力の入力位置が高精度に検出される。
上記のように、実施例1では、衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサ501,502,503を備え、前記少なくとも3個の衝突センサ501,502,503は、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、衝突時、前記少なくとも3個の衝突センサ501,502,503からの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段(ステップS2)を設けた。
このため、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる。
このため、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる。
実施例1の衝突位置検出装置において、前記衝撃入力位置特定手段(ステップS2,ステップS3)は、衝突時、前記少なくとも3個の衝突センサ501,502,503からの衝撃力の検出順序により自車への衝撃力の入力存在領域を決め、決めた入力存在領域にてセンサ間の検出タイミングのずれ量である位相差により自車への衝撃力の入力位置を特定する。
例えば、衝突センサの検出順序のみにより衝撃力の入力位置を特定する場合、3個の衝突センサ501,502,503を用いると、入力位置は6領域のいずれかという特定となり、粗い特定となる。
これに対し、位相差による衝撃力の入力位置の特定手法を加えることで、3個の衝突センサ501,502,503を用いると、入力位置は6領域から12領域に細分化された特定となり、高精度にて自車に対する衝撃力の入力位置を特定することができる。
例えば、衝突センサの検出順序のみにより衝撃力の入力位置を特定する場合、3個の衝突センサ501,502,503を用いると、入力位置は6領域のいずれかという特定となり、粗い特定となる。
これに対し、位相差による衝撃力の入力位置の特定手法を加えることで、3個の衝突センサ501,502,503を用いると、入力位置は6領域から12領域に細分化された特定となり、高精度にて自車に対する衝撃力の入力位置を特定することができる。
実施例1の衝突位置検出装置において、前記衝突センサとして、車両フロントの中央位置に配置した第1衝突センサ501と、車両中央部の右側位置に配置した第2衝突センサ502と、車両中央部の左側位置に配置した第3衝突センサ503と、を用いた。
これによって、図4に示すように、車両全周のうち、車両前半分を右前方領域FRと、左前方領域FLと、右側方領域SRと、右後方領域RRと、の4つの領域に分け、車両後半分を左側方領域SLと、左後方領域RLと、の2つの領域に分けることができる。
このように、最小数である3個の衝突センサ501,502,503を用いながら、車両前半分への衝突を重視した領域分けとなり、自車の前方部や左右側部への衝突時、運転席及び助手席乗員を主体として搭載される乗員保護装置505の作動順序を適切に決めることができる。
これによって、図4に示すように、車両全周のうち、車両前半分を右前方領域FRと、左前方領域FLと、右側方領域SRと、右後方領域RRと、の4つの領域に分け、車両後半分を左側方領域SLと、左後方領域RLと、の2つの領域に分けることができる。
このように、最小数である3個の衝突センサ501,502,503を用いながら、車両前半分への衝突を重視した領域分けとなり、自車の前方部や左右側部への衝突時、運転席及び助手席乗員を主体として搭載される乗員保護装置505の作動順序を適切に決めることができる。
実施例1の衝突位置検出装置において、前記第1衝突センサ501、第2衝突センサ502、第3衝突センサ503は、自車への所定値以上の衝撃力の入力に対しパルス信号を出力するオン/オフスイッチである。
例えば、衝突センサとして、従来技術のように、減速度を精度良く検出するようなGセンサを用いた場合、1個のセンサ単価が高価となり、システムのコストアップとなる。
これに対し、3個の衝突センサ501,502,503をオン/オフスイッチとしたことで、低コストのシステムにて、衝突時、応答良く、かつ、高精度に自車に対する衝撃力の入力位置情報を取得することができる。
例えば、衝突センサとして、従来技術のように、減速度を精度良く検出するようなGセンサを用いた場合、1個のセンサ単価が高価となり、システムのコストアップとなる。
これに対し、3個の衝突センサ501,502,503をオン/オフスイッチとしたことで、低コストのシステムにて、衝突時、応答良く、かつ、高精度に自車に対する衝撃力の入力位置情報を取得することができる。
[エアバック作動制御作用]
自車に対する衝撃力の入力位置が特定されると、図3のフロートチャートにおいて、ステップS3からステップS4→ステップS5へと進む流れとなる。ステップS4では、特定された入力位置に応じて乗員保護装置505である運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDの作動タイミングを決定し、ステップS5では、決定されたタイミングにて4個のエアバックA,B,C,Dの作動が制御される。
自車に対する衝撃力の入力位置が特定されると、図3のフロートチャートにおいて、ステップS3からステップS4→ステップS5へと進む流れとなる。ステップS4では、特定された入力位置に応じて乗員保護装置505である運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDの作動タイミングを決定し、ステップS5では、決定されたタイミングにて4個のエアバックA,B,C,Dの作動が制御される。
例えば、(1)→(2)→(3)の検出順序で、自車への衝撃力の入力位置がP1〜P3の右前方領域FRのうち、領域IIであると特定された場合、図11に示すように、時刻t3のタイミングにて運転席エアバックAが展開され、時刻t4のタイミングにて助手席エアバックBが展開され、時刻t5のタイミングにて左サイドエアバックDが展開され、時刻t6のタイミングにて右サイドエアバックCが展開される。
すなわち、特定された入力位置である領域IIに最も近い運転席エアバックAが最初に展開され、次に近い助手席エアバックBが展開され、その後、左サイドエアバックDと右サイドエアバックCが展開されるというように、衝撃力の入力位置に近い位置のエアバックの展開を優先する展開順序により作動タイミングが設定される。これによって、エアバックA,B,C,Dによる乗員保護機能を最大限に引き出すことができる。
上記のように、実施例1の衝突位置検出装置において、車両に衝突時に乗員を保護する複数の乗員保護装置505と、前記衝撃入力位置特定手段(ステップS2,S3)により自車への衝撃力の入力位置が特定された場合、特定された入力位置に応じて複数の乗員保護装置505の作動タイミングを設定し、設定されたタイミングにて複数の乗員保護装置の作動を制御する乗員保護装置作動制御手段(ステップS4,S5)と、を設けた。
このため、応答良く、かつ、精度良く特定された入力位置に応じ、最適のタイミングにて乗員保護装置505を作動させることができる。
このため、応答良く、かつ、精度良く特定された入力位置に応じ、最適のタイミングにて乗員保護装置505を作動させることができる。
実施例1の衝突位置検出装置において、前記複数の乗員保護装置505は、運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDであり、前記乗員保護装置作動制御手段(ステップS4,S5)は、前記衝撃入力位置特定手段(ステップS2,S3)により自車への衝撃力の入力位置が特定された場合、特定された入力位置に近い位置のエアバックの展開を優先する展開順序により作動タイミングを設定し、設定されたタイミングにて複数のエアバックA,B,C,Dの作動を制御する。
このため、衝突時、乗員保護機能を最大限に引き出しながら、効果的にエアバックA,B,C,Dを展開作動させることができる。
このため、衝突時、乗員保護機能を最大限に引き出しながら、効果的にエアバックA,B,C,Dを展開作動させることができる。
[事故情報発信作用]
エアバックA,B,C,Dが展開作動されると、図3のフローチャートにおいて、ステップS5からステップS6へと進み、ステップS6では、車速がゼロ(=衝突が終了)となったか否かが判断される。そして、衝突終了と判断されると、ステップS6からステップS7→ステップS8→ステップS9→ステップS10へと進む。ステップS7では、衝突開始時から衝突完了までのヨーレートセンサ504による車両挙動検出結果に基づき、衝撃力の大きさ(事故の程度)が把握される。ステップS8では、GPS601からの情報と照合し、事故の発生場所及び事故後の車両が存在する場所が特定される。テップS9では、衝突程度を切り分けられるダイアグ確認方法に基づき、自車システムのダイアグ発生状況が確認される。ステップS10では、ダイアグ発生状況と事故位置を含む事故情報を整理し、外部発信器602を用いて外部レスキュー部隊へと発信される。
エアバックA,B,C,Dが展開作動されると、図3のフローチャートにおいて、ステップS5からステップS6へと進み、ステップS6では、車速がゼロ(=衝突が終了)となったか否かが判断される。そして、衝突終了と判断されると、ステップS6からステップS7→ステップS8→ステップS9→ステップS10へと進む。ステップS7では、衝突開始時から衝突完了までのヨーレートセンサ504による車両挙動検出結果に基づき、衝撃力の大きさ(事故の程度)が把握される。ステップS8では、GPS601からの情報と照合し、事故の発生場所及び事故後の車両が存在する場所が特定される。テップS9では、衝突程度を切り分けられるダイアグ確認方法に基づき、自車システムのダイアグ発生状況が確認される。ステップS10では、ダイアグ発生状況と事故位置を含む事故情報を整理し、外部発信器602を用いて外部レスキュー部隊へと発信される。
例えば、図11の時刻t7にて車速がゼロ(=衝突が終了)と判定された場合、直後の時刻t8にて検出情報が確定し、時刻t8から時刻t9にて確定した検出情報に基づきヨーレート情報とGPS情報が確認される。そして、時刻t9にてダイアグチェックが開始され、時刻t10にてダイアグチェックが終了し、時刻t11から時刻t12まで情報が発信されることになる。
このように、事故状況を詳細にまとめ、外部へと伝達できるようにしたため、事故現場に来てから事故情報を特定するのではなく、事前に事故情報収集することが可能となり、レスキュー作業の効率化を図ることができる。
上記のように、実施例1の衝突位置検出装置において、車両挙動を検出するヨーレートセンサ504(車両挙動検出手段)と、前記衝撃入力位置特定手段(ステップS2,S3)により自車への衝撃力の入力位置が特定された場合、衝突開始時から衝突完了までの前記ヨーレートセンサ504による車両挙動検出結果に基づき、衝撃力の大きさを把握する衝撃力把握手段(ステップS7)と、を設けた。
このため、ヨーレートセンサ504が予め搭載されている車両では、このヨーレートセンサ504からの検出値を活用して衝撃力の大きさである事故程度を把握することができる。
このため、ヨーレートセンサ504が予め搭載されている車両では、このヨーレートセンサ504からの検出値を活用して衝撃力の大きさである事故程度を把握することができる。
実施例1の衝突位置検出装置において、衝突完了後、事故発生場所及び事故後に車両が存在する場所を特定する事故位置特定手段(ステップS8)と、前記衝撃力把握手段により把握された衝撃力の大きさに応じて衝突程度を決め、衝突程度を切り分けられるダイアグ確認方法に基づき、自車システムのダイアグ発生状況を確認するダイアグ確認手段(ステップS9)と、確認したダイアグ発生状況と事故位置を含む事故情報を外部レスキュー部隊へと発信する事故情報発信手段(ステップS10)と、を設けた。
このように、事故状況を詳細にまとめ、外部へと伝達されるため、事故現場に来てから事故情報を特定するのではなく、事前に事故情報収集することが可能となり、レスキュー部隊が素早く事故現場へと到着し、直ちに適切な対応処理を開始することができるというように、レスキュー作業の効率化を図ることができる。
このように、事故状況を詳細にまとめ、外部へと伝達されるため、事故現場に来てから事故情報を特定するのではなく、事前に事故情報収集することが可能となり、レスキュー部隊が素早く事故現場へと到着し、直ちに適切な対応処理を開始することができるというように、レスキュー作業の効率化を図ることができる。
次に、効果を説明する。
実施例1のハイブリッド車両の衝突位置検出装置にあっては、下記に列挙する効果を得ることができる。
実施例1のハイブリッド車両の衝突位置検出装置にあっては、下記に列挙する効果を得ることができる。
(1) 衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサ501,502,503を備え、前記少なくとも3個の衝突センサ501,502,503は、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、衝突時、前記少なくとも3個の衝突センサ501,502,503からの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段(ステップS2)を設けたため、衝突時、自車に対する衝撃力の入力位置を、応答良く、かつ、精度良く検出することができる。
(2) 前記衝撃入力位置特定手段(ステップS2,ステップS3)は、衝突時、前記少なくとも3個の衝突センサ501,502,503からの衝撃力の検出順序により自車への衝撃力の入力存在領域を決め、決めた入力存在領域にてセンサ間の検出タイミングのずれ量である位相差により自車への衝撃力の入力位置を特定するため、検出順序のみの特定に比べ、入力位置が細分化された特定となり、高精度にて自車に対する衝撃力の入力位置を特定することができる。
(3) 前記衝突センサとして、車両フロントの中央位置に配置した第1衝突センサ501と、車両中央部の右側位置に配置した第2衝突センサ502と、車両中央部の左側位置に配置した第3衝突センサ503と、を用いたため、最小数である3個の衝突センサ501,502,503を用いながら、車両前半分への衝突を重視した領域分けとなり、自車の前方部や左右側部への衝突時、運転席及び助手席乗員を主体として搭載される乗員保護装置505の作動順序を適切に決めることができる。
(4) 前記第1衝突センサ501、第2衝突センサ502、第3衝突センサ503は、自車への所定値以上の衝撃力の入力に対しパルス信号を出力するオン/オフスイッチであるため、低コストのシステムにて、衝突時、応答良く、かつ、高精度に自車に対する衝撃力の入力位置情報を取得することができる。
(5) 車両に衝突時に乗員を保護する複数の乗員保護装置505と、前記衝撃入力位置特定手段(ステップS2,S3)により自車への衝撃力の入力位置が特定された場合、特定された入力位置に応じて複数の乗員保護装置505の作動タイミングを設定し、設定されたタイミングにて複数の乗員保護装置の作動を制御する乗員保護装置作動制御手段(ステップS4,S5)と、を設けたため、応答良く、かつ、精度良く特定された入力位置に応じ、最適のタイミングにて乗員保護装置505を作動させることができる。
(6) 前記複数の乗員保護装置505は、運転席エアバックAと、助手席エアバックBと、右サイドエアバックCと、左サイドエアバックDであり、前記乗員保護装置作動制御手段(ステップS4,S5)は、前記衝撃入力位置特定手段(ステップS2,S3)により自車への衝撃力の入力位置が特定された場合、特定された入力位置に近い位置のエアバックの展開を優先する展開順序により作動タイミングを設定し、設定されたタイミングにて複数のエアバックA,B,C,Dの作動を制御するため、衝突時、乗員保護機能を最大限に引き出しながら、効果的にエアバックA,B,C,Dを展開作動させることができる。
(7) 車両挙動を検出するヨーレートセンサ504(車両挙動検出手段)と、前記衝撃入力位置特定手段(ステップS2,S3)により自車への衝撃力の入力位置が特定された場合、衝突開始時から衝突完了までの前記ヨーレートセンサ504による車両挙動検出結果に基づき、衝撃力の大きさを把握する衝撃力把握手段(ステップS7)と、を設けたため、ヨーレートセンサ504が予め搭載されている車両では、このヨーレートセンサ504からの検出値を活用して衝撃力の大きさである事故程度を把握することができる。
(8) 衝突完了後、事故発生場所及び事故後に車両が存在する場所を特定する事故位置特定手段(ステップS8)と、前記衝撃力把握手段により把握された衝撃力の大きさに応じて衝突程度を決め、衝突程度を切り分けられるダイアグ確認方法に基づき、自車システムのダイアグ発生状況を確認するダイアグ確認手段(ステップS9)と、確認したダイアグ発生状況と事故位置を含む事故情報を外部レスキュー部隊へと発信する事故情報発信手段(ステップS10)と、を設けたため、事故現場に来てから事故情報を特定するのではなく、事前に事故情報収集することが可能となり、レスキュー作業の効率化を図ることができる。
以上、本発明の車両の衝突位置検出装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
実施例1では、3個の衝突センサを用い、各センサを結んだ線にて二等辺三角形が描かれる例を示したが、例えば、図12に示すように、4個の衝突センサを用い、各センサを結んだ線にて四角形が描かれる例としても良い。この図12に示す例の場合、2個の衝突センサと等距離にある車両周上位置が8つの位置(黒丸にて示す)となり、検出順序が異なる領域として車両周上が8つの領域に分けられる。
実施例1では、検出順序により特定された入力位置を、2つの衝突センサでの位相差により細分化する好ましい例を示したが、検出順序のみにより衝撃力の入力位置を特定するようにしても良い。要するに、衝突時、少なくとも3個の衝突センサからの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段を設けたものであれば、本発明に含まれる。
実施例1では、衝突センサとして衝撃力を検出するスイッチを用いる例を示したが、衝撃力の入力位置からの設定距離に応じ時間差を持って衝撃の入力を検出することができるものであれば、例えば、衝撃音を検出する音センサや衝撃振動を検出する振動センサ等を用いても良い。
実施例1では、前輪駆動ベースによるハイブリッド車両への適用例を示したが、後輪駆動ベースによるハイブリッド車両やハイブリッド四輪駆動車にも適用することができるし、さらに、エンジン車や電気自動車や燃料電池車等にも適用することができる。
101 CPU
102 補助バッテリ
201 ブレーキアクチュエータ
202 機械ブレーキ
301 強電バッテリ
302 インバータ
303 モータ
304 発電機
305 エンジン
306 動力分割機構
401 アクセルセンサ
402 ブレーキセンサ
403 DC/DCコンバータ
501 前方衝突センサ(第1衝突センサ)
502 右側方衝突センサ(第2衝突センサ)
503 左側方衝突センサ(第3衝突センサ)
504 ヨーレートセンサ(車両挙動検出手段)
505 乗員保護装置
601 GPS
602 外部発信器
102 補助バッテリ
201 ブレーキアクチュエータ
202 機械ブレーキ
301 強電バッテリ
302 インバータ
303 モータ
304 発電機
305 エンジン
306 動力分割機構
401 アクセルセンサ
402 ブレーキセンサ
403 DC/DCコンバータ
501 前方衝突センサ(第1衝突センサ)
502 右側方衝突センサ(第2衝突センサ)
503 左側方衝突センサ(第3衝突センサ)
504 ヨーレートセンサ(車両挙動検出手段)
505 乗員保護装置
601 GPS
602 外部発信器
Claims (9)
- 衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、
自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサを備え、
前記少なくとも3個の衝突センサは、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、
衝突時、前記少なくとも3個の衝突センサからの衝撃力の検出順序により自車への衝撃力の入力位置を特定する衝撃入力位置特定手段を設けたことを特徴とする車両の衝突位置検出装置。 - 請求項1に記載された車両の衝突位置検出装置において、
前記衝撃入力位置特定手段は、衝突時、前記少なくとも3個の衝突センサからの衝撃力の検出順序により自車への衝撃力の入力存在領域を決め、決めた入力存在領域にてセンサ間の検出タイミングのずれ量である位相差により自車への衝撃力の入力位置を特定することを特徴とする車両の衝突位置検出装置。 - 請求項1または2に記載された車両の衝突位置検出装置において、
前記衝突センサとして、車両フロントの中央位置に配置した第1衝突センサと、車両中央部の右側位置に配置した第2衝突センサと、車両中央部の左側位置に配置した第3衝突センサと、を用いたことを特徴とする車両の衝突位置検出装置。 - 請求項1乃至3の何れか1項に記載された車両の衝突位置検出装置において、
前記第1衝突センサ、第2衝突センサ、第3衝突センサは、自車への所定値以上の衝撃力の入力に対しパルス信号を出力するオン/オフスイッチであることを特徴とする車両の衝突位置検出装置。 - 請求項1乃至4の何れか1項に記載された車両の衝突位置検出装置において、
車両に衝突時に乗員を保護する複数の乗員保護装置と、
前記衝撃入力位置特定手段により自車への衝撃力の入力位置が特定された場合、特定された入力位置に応じて複数の乗員保護装置の作動タイミングを設定し、設定されたタイミングにて複数の乗員保護装置の作動を制御する乗員保護装置作動制御手段と、
を設けたことを特徴とする車の衝突位置検出装置。 - 請求項5に記載された車両の衝突位置検出装置において、
前記複数の乗員保護装置は、運転席エアバックと、助手席エアバックと、右サイドエアバックと、左サイドエアバックであり、
前記乗員保護装置作動制御手段は、前記衝撃入力位置特定手段により自車への衝撃力の入力位置が特定された場合、特定された入力位置に近い位置のエアバックの展開を優先する展開順序により作動タイミングを設定し、設定されたタイミングにて複数のエアバックの作動を制御することを特徴とする車の衝突位置検出装置。 - 請求項1乃至6の何れか1項に記載された車両の衝突位置検出装置において、
車両挙動を検出する車両挙動検出手段と、
前記衝撃入力位置特定手段により自車への衝撃力の入力位置が特定された場合、衝突開始時から衝突完了までの前記車両挙動検出手段による車両挙動検出結果に基づき、衝撃力の大きさを把握する衝撃力把握手段と、
を設けたことを特徴とする車両の衝突位置検出装置。 - 請求項7に記載された車両の衝突位置検出装置において、
衝突完了後、事故発生場所及び事故後に車両が存在する場所を特定する事故位置特定手段と、
前記衝撃力把握手段により把握された衝撃力の大きさに応じて衝突程度を決め、衝突程度を切り分けられるダイアグ確認方法に基づき、自車システムのダイアグ発生状況を確認するダイアグ確認手段と、
確認したダイアグ発生状況と事故位置を含む事故情報を外部レスキュー部隊へと発信する事故情報発信手段と、
を設けたことを特徴とする車両の衝突位置検出装置。 - 衝突時、自車に対する衝撃力の入力位置を検出する車両の衝突位置検出装置であって、
自車への衝撃力を検出して信号を出力する少なくとも3個の衝突センサを備え、
前記少なくとも3個の衝突センサは、車両全周の衝撃入力位置を、選択した2個の衝突センサと等距離にある車両周上位置を境として複数の領域に分けたとき、各領域で異なる検出順序となる車両位置に配置し、
衝突時、前記少なくとも3個の衝突センサからの衝撃力の検出順序により自車への衝撃力の入力存在領域を決めることで自車への衝撃力の入力位置を特定することを特徴とする車両の衝突位置検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005376902A JP2007176307A (ja) | 2005-12-28 | 2005-12-28 | 車両の衝突位置検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005376902A JP2007176307A (ja) | 2005-12-28 | 2005-12-28 | 車両の衝突位置検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007176307A true JP2007176307A (ja) | 2007-07-12 |
Family
ID=38301913
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005376902A Pending JP2007176307A (ja) | 2005-12-28 | 2005-12-28 | 車両の衝突位置検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007176307A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014133478A (ja) * | 2013-01-10 | 2014-07-24 | Denso Corp | 車両情報記録装置 |
| US8996199B2 (en) | 2013-01-17 | 2015-03-31 | Denso Corporation | Vehicle accident history recorder |
| CN117182920A (zh) * | 2023-10-09 | 2023-12-08 | 苏州灵动佳芯科技有限公司 | 机器人碰撞检测装置、方法及机器人 |
-
2005
- 2005-12-28 JP JP2005376902A patent/JP2007176307A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014133478A (ja) * | 2013-01-10 | 2014-07-24 | Denso Corp | 車両情報記録装置 |
| US8996199B2 (en) | 2013-01-17 | 2015-03-31 | Denso Corporation | Vehicle accident history recorder |
| CN117182920A (zh) * | 2023-10-09 | 2023-12-08 | 苏州灵动佳芯科技有限公司 | 机器人碰撞检测装置、方法及机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3075594B1 (en) | Drive control device for movable body | |
| CN105216713B (zh) | 车辆控制系统及其使用方法 | |
| CN104781108A (zh) | 用于控制具有预见性碰撞识别单元的车辆的、与安全带连接的安全带装置的方法和装置 | |
| CN102837698A (zh) | 车辆碰撞损伤缓解系统及其控制方法 | |
| US20240149863A1 (en) | Method of controlling towing mode of eco-friendly vehicle | |
| JPH08169297A (ja) | 車両の衝突状態制御システム | |
| CN107776567A (zh) | 混合动力车辆的控制装置 | |
| CN102905936A (zh) | 用于保护和保持乘员的方法和装置以及保护与保持装置的分析与控制单元 | |
| JP2007129827A (ja) | ハイブリッド車両のインテリジェントブレーキアシストシステム | |
| JP6079278B2 (ja) | 車両の走行モータ制御システム | |
| JP2007125997A (ja) | 車両のインテリジェントブレーキアシストシステム | |
| JP2007176307A (ja) | 車両の衝突位置検出装置 | |
| KR20240084327A (ko) | 차량용 에어백장치 | |
| JP2005113760A (ja) | 衝突衝撃軽減装置および衝突衝撃軽減方法 | |
| JP4440708B2 (ja) | 車両の制御装置 | |
| CN112193196B (zh) | 车辆 | |
| JP5492677B2 (ja) | 車両の制御システム | |
| JP4674569B2 (ja) | 電気自動車の電力供給制御装置 | |
| US12344182B2 (en) | Airbag apparatus for vehicle and method of controlling operation of the same | |
| CN111942283A (zh) | 车辆 | |
| JP4614183B2 (ja) | 車両のシートベルト装置 | |
| JP2008174054A (ja) | 車両用安全装置 | |
| KR20150061784A (ko) | 스마트 부스터를 이용한 차량 제동 시스템 및 방법 | |
| CN115891901A (zh) | 车辆以及马达安全带控制方法 | |
| JP6848478B2 (ja) | 二次衝突抑制装置 |