JP2007183121A - 回転角およびトルク検出装置 - Google Patents
回転角およびトルク検出装置 Download PDFInfo
- Publication number
- JP2007183121A JP2007183121A JP2006000342A JP2006000342A JP2007183121A JP 2007183121 A JP2007183121 A JP 2007183121A JP 2006000342 A JP2006000342 A JP 2006000342A JP 2006000342 A JP2006000342 A JP 2006000342A JP 2007183121 A JP2007183121 A JP 2007183121A
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- rotating body
- target
- detection means
- detection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/104—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving permanent magnets
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】着磁極の寸法の細分化やコード板のバックラッシなどにより検知精度の向上が困難で、相対回転角検知しか出来ないものに対し、高精度・高分解能なトルク検知と多回転角検知を行える装置の提供を目的とする。
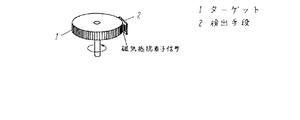
【解決手段】外周面に等間隔をなして交互に極性の異なる磁極が着磁してある多回転可能なターゲット1と、前記ターゲット1の半径方向にある一定距離を設けると共に前記ターゲットの軸方向の中心からも一定距離ずらし、かつ前記ターゲット1の半径方向と垂直な面に配置された検出手段2を含む磁気的センサを対として構成された回転角およびトルク検出装置で、トルク検知と多回転角検知を高分解能/高精度にできるという作用効果が得られる。
【選択図】図1
【解決手段】外周面に等間隔をなして交互に極性の異なる磁極が着磁してある多回転可能なターゲット1と、前記ターゲット1の半径方向にある一定距離を設けると共に前記ターゲットの軸方向の中心からも一定距離ずらし、かつ前記ターゲット1の半径方向と垂直な面に配置された検出手段2を含む磁気的センサを対として構成された回転角およびトルク検出装置で、トルク検知と多回転角検知を高分解能/高精度にできるという作用効果が得られる。
【選択図】図1
Description
本発明は、車両のパワーステアリング等に用いられる絶対回転角及びトルク検出装置に関わるものであり、特にステアリングの回転角とトルク検出を同時に可能にする回転角及びトルク検出装置に関するものである。
従来、トルク及び回転角を検知する方式として、例えば特許文献1に示されたような方式が知られている。図12において、38は歯車部であり、回転角を検知したい回転軸(図示せず)に、係合バネ39を介して固定して取り付けられる。この歯車部38は、外周端面に複数個の磁極を着磁したコード板40が取り付けられた歯車部41と噛み合っており、検知する回転軸の回転にしたがって、コード板40に設けられた磁極が移動する。この磁極の数を、外周端面に対向して設けられた検知素子42でカウントすることにより、回転角を検知する。また、この構成による機構を、トーションバーを介して連結された2本の軸に各々取り付けることにより、2本の軸間にトルクが作用して、軸間のねじれが発生した時、各々の軸の回転角を比較することによって、作用したトルクの量を検知する。
特開平11−194007号公報
しかしながら、このように構成された回転角センサ或いはトルク検知センサにおいては、軸の回転角をコード板40の外周端面に配置された複数の磁極の移動数をカウントすることにより検知するため、検知角の分解能を向上させるためには、着磁磁極間の距離を小さくする必要があるという課題があった。また、コード板40の回転と軸の回転とは歯車を介しているため、バックラッシ等により検知精度の向上が困難であるという課題があった。またこの回転センサは相対回転角検知しかできなく多回転の回転角検知ができないという課題があった。
本発明は、上記のような課題を解決するもので、高精度・高分解能にトルク検知及び多回転の回転角検知を行う回転角およびトルク検出装置の提供を目的とするものである。
上記目的を達成するために、本発明の回転角およびトルク検出装置は以下の構成を有するものである。
本発明の請求項1に記載の発明は、外周面に等間隔をなして交互に極性の異なる磁極が着磁してある多回転可能なターゲットと、前記ターゲットの半径方向にある一定距離を設けると共に前記ターゲットの軸方向の中心からも一定距離ずらし、かつ前記ターゲットの半径方向と垂直な面に配置された検出手段を含む磁気的センサを対として構成されており、ターゲットの回転角を高分解能/高精度に検知できるという作用効果が得られる。
本発明の請求項2に記載の発明は、入力軸ないし出力軸と嵌合連結し請求項1記載のターゲットと同様の構造をもつ第1のターゲットを保持した多回転可能な第1の回転体と、請求項1記載の検出手段と同様の位置に配置され同様の構造をもつ第1の検出手段と、出力軸ないし入力軸と嵌合連結し請求項1記載のターゲットと同様の構造をもつ第2のターゲットを保持した多回転可能な第2の回転体と、請求項1記載の検出手段と同様の位置に配置され同様の構造をもつ第2の検出手段と、入力軸ないし出力軸と嵌合連結され、歯車を持つ第3の回転体と、前記第3の回転体の歯車に接続され、中心部に第3のターゲットが配置された歯車を持つ第4の回転体と、前記第4の回転体の回転角を検出する第3の検出手段と、前記第4の回転体の歯車に接続され、中心部に第4のターゲットが配置された歯車を持つ第5の回転体と、前記第5の回転体の回転角を検出する第4の検出手段とを配置した構成を有しており、前記第1ないし第2の検出手段により検出された前記第1ないし第2の回転体の回転角と、前記第3、第4の検出手段により検出された第4、第5の回転体の回転角から算出された第3の回転体の多回転角とを組み合わせることにより前記第1ないし第2の回転体の多回転角検知を高分解能/高精度に行うことができるという作用効果が得られる。
以上のように本発明によれば、外周面に等間隔をなして交互に極性の異なる磁極が着磁してある多回転可能なターゲットと、前記ターゲットの半径方向にある一定距離を設けると共に前記ターゲットの軸方向の中心からも一定距離ずらし、かつ前記ターゲットの半径方向と垂直な面に配置された検出手段を含む磁気的センサを対として構成された回転角およびトルク検出装置を提供するものであり、このターゲットと検出手段の構成を入出力軸に設けることにより高分解能/高精度にトルク検知ができると共に歯数の異なる歯車を持った回転体の回転角差より求めた多回転回転角と組み合わせることにより前記ターゲットの多回転角を高分解能/高精度に検知でき、検出手段を磁気検出素子にすることにより非接触でターゲットの回転角を検知できるため、装置の耐久性、信頼性の向上が図れ、前記多極着磁されたターゲットの回転角と歯車の回転角とを比較することにより装置の異常検知ができるという効果を奏するものである。
以下、本発明の実施の形態について、図1から図11を用いて説明する。
図1は実施の形態1におけるターゲットと検出手段の基本構成図、図2(a)、(b)はターゲットに対する検出手段の相対位置を示す図、図3はターゲット軸方向の中心に対向する位置で、半径方向と垂直な面に形成された磁界方向を示す図、図4はターゲットのエッジ付近に対向する位置で半径方向と垂直な面に形成された磁界方向を示す図、図5(a)、(b)、(c)は回転角およびトルク検出装置の基本構成図、図6は回転角及びトルク検出装置の回路ブロック図、図7(a)、(b)は第1、第2の検出手段の出力信号を示す図、図8(a)、(b)は第3の検出手段の出力信号を示す図、図9(a)、(b)は第4の検出手段の出力信号を示す図、図10はトルク検出に使われる第1、第2の回転体の回転角と第3の回転体の回転角検出に使われる第4、第5の回転体の回転角を示す図、図11はトルク検出特性図である。
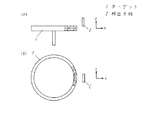
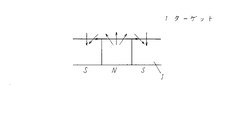
図1において、1は外周面に等間隔をなして交互に極性の異なる磁極が着磁されているターゲット、2はターゲット1に対向する位置に配置されこの磁界方向を検出する検出手段(磁気検出素子)である。図2に示すように検出手段2(磁気検出素子)はターゲット1の半径方向(X方向)に一定距離を離し、ターゲット1の軸方向(Z方向)にも中心から一定距離ずらし、しかも前記ターゲット1の半径方向(X方向)と垂直な面(YZ面)に配置されている。図3に示すようにターゲット1の軸方向中心において円周面に対向する位置の磁界方向はYZ面において直線的に変化する。これは磁界方向を検出する検出手段2(磁気検出素子)が2方向の信号(0deg或いは180deg)しか得ることができないことを意味しており前記ターゲット1の回転角を検出できない。しかし検出手段2をターゲット1の軸方向(Z方向)の中心から一定距離ずらすと図4に示すように円周面に対向する位置の磁界方向はYZ面において回転する。故に検出手段2(磁気検出素子)は前記ターゲット1の回転角に応じて変化する磁界方向を検出できる。
図5において、3は入力軸4に嵌合した多回転可能な第1の回転体、5は第1の回転体3に保持され、外周面に等間隔をなして交互に極性の異なる磁極が着磁されている第1のターゲット、6は出力軸7に嵌合した多回転可能な第2の回転体、8は第2の回転体6に保持され、外周面に等間隔をなして交互に極性の異なる磁極が着磁されている第2のターゲット、9は入力軸4と出力軸7の間の同心軸上に配置されたトーションバー、10は第1の回転体3に嵌合した多回転可能な歯車を有する第3の回転体、11は第3の回転体10の歯車と係合した第4の回転体、12は第4の回転体11の中央部に配置された第3のターゲット(単極磁石)、13は第3のターゲット12に対向する位置に配置され、この磁界方向を検出する第3の検出手段(磁気検出素子)、14は第4の回転体11の歯車と係合した第5の回転体、15は第5の回転体14の中央部に配置された第4のターゲット(単極磁石)、16は第4のターゲット15に対向する位置に配置されこの磁界方向を検出する第4の検出手段(磁気検出素子)、17は第1のターゲット5に対向する位置に配置されこの磁界方向を検出する第1の検出手段(磁気検出素子)、18は第2のターゲット8に対向する位置に配置されこの磁界方向を検出する第2の検出手段(磁気検出素子)、19は第1、第2の検出手段17、18(磁気検出素子)が配置される基板、20は第3、第4の検出手段13、16(磁気検出素子)が配置される基板である。
ここで、第1、第2の回転体3、6に設けた第1、第2のターゲット5、8に対向配置された第1、第2の検出手段17、18は、図1、図2において説明したと同様に第1、第2のターゲット5、8に対し、特定位置の関係を持って配置されていることは言うまでもない。
前記第1のターゲット5と第2のターゲット8の着磁極数は同数とする。その磁極数は最大トルク検出量やトーションバー定数によって決まる。たとえば、最大トルク検出を±8N・m、トーションバー定数を2N・m/degとした時最大捩れ角は±4degとなる。余裕をみて磁極数は30極(N極15、S極15)と決定している。この場合、1極当り12degになる。
第1、第2、第3、第4の検出手段17、18、13、16について、磁気抵抗素子(以下MR素子とする)を用いた場合について説明する。各MR素子は磁界方向を検知し正弦波信号と余弦波信号としてアナログ出力する。
第1、第2の検出手段17、18で第1、第2のターゲット5、8の磁界方向の変化を検知する場合、磁極1極に対し、1周期の正弦波および余弦波信号が出力されるため、第1、第2のターゲット5、8を1回転させると、着磁極数分の正弦波および余弦波信号を得ることができる。図6に示すようにこれらの信号は増幅部21、22にて規定の振幅に増幅し、マイクロコンピュータ23(以下CPUとする)内のA/Dコンバータ(図示せず)に入力し演算処理して、第1、第2のターゲット5、8すなわち第1、第2の回転体3、6の回転角を算出する。図7にその波形を示す。図7(a)において、横軸は入力軸4および出力軸7に嵌合した第1、第2の回転体3、6の回転角を示しており、縦軸は第1、第2の検出手段17、18からの正弦波信号24および余弦波信号25を示している。図7(b)において、横軸は第1、第2の回転体3、6の回転角を示しており、縦軸は前記正弦波信号24および余弦波信号25よりCPU23で算出した第1、第2の回転体3、6の回転角を示している。
一方、第4の回転体11の歯車は第3の回転体10の歯車と連結されており、第4の回転体11と第3の回転体10の歯数比による速比で回転する。
第3の検出手段13は、第4の回転体11の中心部に配置された第3のターゲット(単極磁石)12の磁界方向を検知し、第3のターゲット(単極磁石)12の0.5回転に対し、1周期の正弦波および余弦波信号が出力する。この出力をCPU23にて演算処理し、第4の回転体11の回転角を算出することができる。図8にその波形を示す。図8(a)において、横軸は第3の回転体10の回転角を示しており、縦軸は第3の検出手段13からの正弦波信号26および余弦波信号27を示している。図8(b)において、横軸は第3の回転体10の回転角を示しており、縦軸は、第4の回転体11の回転角を前記正弦波信号26および余弦波信号27よりCPU23で演算したものを示している。
第5の回転体14の歯車は第4の回転体11の歯車を介して第3の回転体10と連結されており、第5の回転体14は第3の回転体10が回転すると各歯車の歯数の比による速比で回転する。
第4の検出手段16は、第5の回転体14の中心部に配置された第4のターゲット(単極磁石)15の磁界方向を検知し、第4のターゲット(単極磁石)15の0.5回転に対し、1周期の正弦波および余弦波信号が出力する。この出力をCPU23にて演算処理し、第5の回転体14の回転角を算出する。図9にその波形を示す。図9(a)において、横軸は第3の回転体10の回転角を示しており、縦軸は第4の検出手段16からの正弦波信号28および余弦波信号29を示している。図9(b)において、横軸は第3の回転体10の回転角を示しており、縦軸は、第5の回転体14の回転角を前記正弦波信号28および余弦波信号29よりCPU23で演算したものを示している。
図6において、前記第3、第4の検出手段13、16は増幅部30、31を介してCPU23に接続されている。一方、CPU23で算出された回転角とトルクは出力信号線32より出力する。
図10(a)において、横軸は入力軸4に嵌合された第3の回転体10の回転角を示しており、縦軸は第3の検出手段13から得た信号より算出した第4の回転体11の回転角を示している。
図10(b)において、横軸は入力軸4に嵌合された第3の回転体10の回転角を示しており、縦軸は第4の検出手段16から得た信号より算出した第5の回転体14の回転角を示している。第4の回転体11に搭載されている歯車の歯数と第5の回転体14に搭載されている歯車の歯数が違うため第3の回転体10の回転角に対する回転周期は異なる。
図10(c)において、横軸は入力軸4に嵌合された第3の回転体10の回転角を示しており、縦軸は第3の検出手段13から得た信号と第4の検出手段16から得た信号とより算出した第4の回転体11と第5の回転体14の回転角差を示している。
図10(d)において、横軸は入力軸4に嵌合された第1の回転体3の回転角を示しており、縦軸は第1の検出手段17から得た信号より算出した第1のターゲット5の回転角を示している。
図10(e)において、横軸は出力軸7に嵌合された第2の回転体6の回転角を示しており、縦軸は第2の検出手段18から得た信号より算出した第2のターゲット8の回転角を示している。
図11はトルク検出特性図を示しており、横軸は入力軸4或いは出力軸7の回転角を示している。縦軸は第1の回転体3に保持された第1のターゲット5と第2の回転体6に保持された第2のターゲット8の回転角差より算出されたトーションバー9のねじり角から得られるトルクを示している。第1の回転体3の回転角をX、第2の回転体6の回転角をY、トーションバー定数をTとすると、検出トルクは(X−Y)×Tで算出することが出来る。
次に、以上の構成によりトーションバーにかかるトルクの算出方法について説明する。
図5において、同一剛体である入力軸4とトーションバー9と出力軸7が回転したとき、この入力軸4と嵌合している第1の回転体3が回転する。この第1の回転体3が回転すると、この第1の回転体3に保持されている第1のターゲット5が回転する。これにより、第1のターゲット5に対向する位置に配置された第1の検出手段17が多極リング磁石である第1のターゲット5の磁界方向を検知し、その出力をCPU23にて演算処理して第1の回転体3の回転角を算出する。一方、前記出力軸7と嵌合している第2の回転体6も回転する。この第2の回転体6が回転すると、この第2の回転体6に保持されている第2のターゲット8が回転する。これにより、第2のターゲット8に対向する位置に配置された第2の検出手段18が多極リング磁石である第2のターゲット8の磁界方向を検知し、その出力をCPU23にて演算処理して、第2の回転体6の回転角を算出する。この第1、第2の回転体3、6の回転角の差をとり、これにトーションバー定数を乗することでトルクを算出することができる。図10(d)、(e)にCPU23で各検出手段の出力信号より算出した回転角を示す。33は第1の回転体に保持された第1のターゲット5の回転角、34は第2の回転体に保持された第2のターゲット8の回転角を示す。この回転角差より求めたトルクを図11に示す。
次に、回転体の多回転角検出の方法について説明する。
図5において、第1の回転体3に嵌合された第3の回転体10が回転したとき、その第3の回転体10の歯車に接続された第4の回転体11の歯車によって第4の回転体11を回転させる。同時に第4の回転体11の歯車に接続された第5の回転体14の歯車によって第5の回転体14を回転させる。第3の回転体10の歯車の歯数をa、第4の回転体11の歯車の歯数をb、第5の回転体14の歯車の歯数をcとすると、第4の回転体11は、第3の回転体10に対して、a/b倍の速さで回転し、第5の回転体14は第3の回転体10に対して、a/c倍の速さで回転する。
この際、歯車の歯数a、b、cを適切に選択することにより、第4の回転体11と第5の回転体14の回転角差から第3の回転体10の多回転角を得ることができる。
第4の回転体11の中心部に配置された第3のターゲット(単極磁石)12に対向するように配置された第3の検出手段13は、第3の検出手段13を貫く磁界方向を検知して第4の回転体11の回転角を検出する。
一方第5の回転体14の中心部に配置された第4のターゲット(単極磁石)15に対向して配置された第4の検出手段16は、第4の検出手段16を貫く磁界方向を検知して第5の回転体14の回転角を検知する。第3の検出手段13と第4の検出手段16の出力信号はCPU23内のA/Dコンバータを介して入力される。第3の検出手段13と第4の検出手段16の出力信号から算出される回転角差から第3の回転体10の多回転角を算出し、この多回転角から第1或いは第2のターゲット5、8の磁極の位置を推定して、第1或いは第2のターゲット5、8の多回転角を高精度に算出する。図10に第1、第2、第3、第4の検出手段17、18、13、16の信号に基づいてCPU23で算出された回転角を示す。35は第3の検出手段13の出力信号より演算した第4の回転体11の回転角を、36は第4の検出手段16の出力信号より演算した第5の回転体14の回転角をそれぞれ示している。37は第3、第4の検出手段13、16の出力信号より算出した第4、第5の回転体11、14の回転角差を示している。回転角差37は第3の回転体10の回転検出範囲0deg〜1800degにおいて電気角が0degから180deg直線的に変化する。これは回転角差37でもって第3の回転体10の多回転角を回転検出範囲0deg〜1800degにおいて一意的に確定できることを意味する。
一方第1の検出手段17の信号に基づいて算出された第1のターゲット5(多極リング磁石)の回転角33は着磁された極間の回転角(この例の場合12deg)において電気角が0degから180deg直線的に変化する。これは回転角33でもって第1のターゲット5を保持している第1の回転体3の回転角を着磁された極間の回転角において一意的に確定できることを意味する。前記第3の回転体10と第1或いは第2のターゲット5、8が保持されている第1、第2の回転体3、6は同一軸に嵌合されているため前記第3の回転体10の多回転角から第1或いは第2のターゲット5、8の磁極の位置を推定して、第1或いは第2のターゲット5、8の多回転角を高精度に算出することができる。
次に第1の回転体3と第2の回転体6の絶対回転角を常に比較して装置の異常を検知する方法について図5、図7、図10より説明する。
図5において、第1の回転体3が回転すると第2の回転体6もトーションバー9を介して回転する。しかし最大トルク以上がかからない構造になっているため第1の回転体3と第2の回転体6の回転角差が規定値以上になると機構上の異常あるいは素子回路上の異常と判断できる。第1の回転体3が回転すると第1のターゲット5も回転する。この第1のターゲット5の回転と共に磁界方向も変化し、この磁界方向の変化を第1の検出手段17で検出する。第1の検出手段17からは、この磁界方向の変化に対して正弦波信号24と余弦波信号25を出力する。図7(a)にこれらの出力信号を示す。横軸に第1の回転体3の回転角をとってそれぞれの信号を示している。これらの信号は増幅器21を介してCPU23に入力され正弦波信号24と余弦波信号25より逆正接信号を算出して第1の回転体3の回転角を求める。
同様に第2の回転体6が回転すると第2のターゲット8も回転する。この第2のターゲット8の回転と共に磁界方向も変化し、この磁界方向の変化を第2の検出手段18で検出する。第2の検出手段18からは、この磁界方向の変化に対して正弦波信号24と余弦波信号25を出力する。図7(a)にこれらの出力信号を示す。横軸に第2の回転体6の回転角をとってそれぞれの信号を示している。これらの信号は増幅器22を介してCPU23に入力され正弦波信号24と余弦波信号25より逆正接信号を算出して第2の回転体6の回転角を求める。図10(d)、(e)において第1の回転体3(すなわち第1のターゲット5)の回転角33と第2の回転体6(すなわち第2のターゲット8)の回転角との差は回転角の原点を一致させておけば異常がない限り規定値以下の値となる。
次に第1の回転体3と第4の回転体11の回転角を常に比較して装置の異常を検知する方法について図5、図7、図8、図10より説明する。
図5において、第1の回転体3が回転するとこの第1の回転体3に保持されている第1のターゲット5が回転する。第1のターゲット5の表面に30極が着磁してあるとすると図7(a)に示すような出力信号が第1検出手段17より得られる。第1の回転体3が12deg回転する毎に正弦波信号24と余弦波信号25が1周期変化しこれらの信号より算出される電気角が180deg変化する。すなわち第1の回転体3の回転角を12degの範囲において一意的に得ることができる。第3の回転体10の歯車と第4の回転体11の歯車の歯数比を1/3とすると図8(a)に示すように第3の回転体10が60deg回転する毎に正弦波信号26と余弦波信号27が1周期変化しこれらの信号より算出される電気角が180deg変化する。図10において第1の検出手段17より算出した第1のターゲット5の回転角33と第3の検出手段13より算出した第4の回転体11の回転角35との差はある回転角を原点にして回転角33と回転角35の勾配を1周期の回転角比(12:60=1:5)にて補正すれば装置に異常がない限り規定値以下の値となる。すなわち回転角35の値を5倍したものと回転角33との差を求めて異常判定を行う。
次に前記第1、第2、第3、第4の検出手段(磁気検出素子)17、18、13、16および増幅部21、22、30、31等の感度バラツキによる回転検出誤差発生を防止する方法について図5、図6、図7、図8、図9、図13より説明する。
図5において、第1回転体3が回転すると第1のターゲット5も回転する。この第1のターゲット5の回転と共に磁界方向が変化し、この磁界方向の変化を第1の検出手段17で検出する。第1の検出手段17からは、この磁界方向の変化に対して正弦波信号24と余弦波信号25を出力する。図7(a)にこれらの出力信号を示す。横軸に第1の回転体3の回転角をとってそれぞれの信号出力を示している。これらの信号は増幅部21を介してCPU23に入力され前記正弦波信号24と前記余弦波信号25より逆正接信号を算出する。しかし図13に示すように正弦波信号レベル45と余弦波信号レベル46が、磁気検出素子や増幅部の感度バラツキにより微妙に異なると、算出された逆正接信号の精度が落ちてくる。そこで図6に示すスイッチ信号50をONして感度記憶モードにした時のみ、第1の回転体3を12deg以上回転させ、正弦波信号44と余弦波信号43の信号レベル(感度)45、46を算出し、不揮発性のメモリ(EEPROM)51に記憶する。同様に第2の回転体6に保持されている第2のターゲット8の回転角を検出する第2の検出手段18の信号レベルについても不揮発性のメモリ(EEPROM)51に記憶する。回転角の算出時にはスイッチ信号50をOFFにし、記憶した信号レベル(感度)45、46により正弦波信号44と余弦波信号43の最大、最小レベルが一致するように補正したものから逆正接信号を算出して回転角を求める。
また図5に示す第4、第5の回転体11、14が180deg以上回転するように第3の回転体10を回転させ、図8、図9に示す正弦波信号26、28と余弦波信号27、29の信号レベル(感度)を算出し不揮発性のメモリ(EEPROM)51に記憶し、図13に示したように記憶した信号レベル(感度)45、46により正弦波信号44と余弦波信号43の最大、最小レベルが一致するように補正したものから逆正接信号を算出して回転角を求める。
また、図13の第1、第2、第3、第4の検出手段17、18、13、16の出力の最大値、最小値が基準範囲内47に無い場合、温度特性などによって出力が変化しなくなったり、必要な分解能が得られないことが発生する。そこで、出力が基準範囲47内に最大値、最小値があることを比較確認する手段(図示せず)で確認することにより回転角の検出誤差拡大の防止が可能になる。なお、第1、第2、第3、第4の検出手段17、18、13、16の出力の振幅中心48、49を比較確認する手段(図示せず)で、ある範囲に入っているか否かを確認することにより、また前記振幅中心48、49を一致させる補正をすることにより、算出された回転角の検出誤差拡大の防止が可能になる。さらに、このとき複数回ずつ入力を行い、平均値を取る、もしくは最大値、最小値を除いた平均値を取るなどすればより高い精度で回転角検出が可能となる。
また、任意の特定位置での第1、第2、第3、第4の検出手段17、18、13、16の信号出力又はこれらの信号出力より算出される回転角を記憶することにより任意の位置からの回転角を一意的に検出できる。またトルクをかけない状態でこれらの値を記憶することによりトルクの原点も設定できる。またこのとき、図6の特定位置決定用信号線52のように電気信号で特定位置であることを送信すれば機械的な動作無しで特定位置の確定ができる。さらに、電気信号を複数回読み込みチェックする、または、シリアル信号などで送るようにすれば、ノイズなどにより誤った信号が入った場合除去することができる。なお、特定位置決定用信号線52は出力信号線32の入出力を切り替えて、同じ端子を使っても同様の効果が得られる。
本発明の回転角及びトルク検出装置は、車両のパワーステアリング等で使用され、簡単な構成で高精度・高分解能にトルク検知及び多回転角検知を行うことができるという作用効果を有する。
1 ターゲット
2 検出手段
3 第1の回転体
4 入力軸
5 第1のターゲット
6 第2の回転体
7 出力軸
8 第2のターゲット
9 トーションバー
10 第3の回転体
11 第4の回転体
12 第3のターゲット
13 第3の検出手段
14 第5の回転体
15 第4のターゲット
16 第4の検出手段
17 第1の検出手段
18 第2の検出手段
19 基板
20 基板
2 検出手段
3 第1の回転体
4 入力軸
5 第1のターゲット
6 第2の回転体
7 出力軸
8 第2のターゲット
9 トーションバー
10 第3の回転体
11 第4の回転体
12 第3のターゲット
13 第3の検出手段
14 第5の回転体
15 第4のターゲット
16 第4の検出手段
17 第1の検出手段
18 第2の検出手段
19 基板
20 基板
Claims (15)
- 外周面に等間隔をなして交互に極性の異なる磁極が着磁してある多回転可能なターゲットと、前記ターゲットの半径方向にある一定距離を設けると共に前記ターゲットの軸方向の中心からも一定距離ずらし、かつ前記ターゲットの半径方向と垂直な面に配置された検出手段を含む磁気的センサを対として構成されたことを特徴とする回転角およびトルク検出装置。
- 入力軸ないし出力軸と嵌合連結し請求項1記載のターゲットと同様の構造をもつ第1のターゲットを保持した多回転可能な第1の回転体と、請求項1記載の検出手段と同様の位置に配置され同様の構造をもつ第1の検出手段と、出力軸ないし入力軸と嵌合連結し請求項1記載のターゲットと同様の構造をもつ第2のターゲットを保持した多回転可能な第2の回転体と、請求項1記載の検出手段と同様の位置に配置され同様の構造をもつ第2の検出手段と、入力軸ないし出力軸と嵌合連結され、歯車を持つ第3の回転体と、前記第3の回転体の歯車に接続され、中心部に第3のターゲットが配置された歯車を持つ第4の回転体と、前記第4の回転体の回転角を検出する第3の検出手段と、前記第4の回転体の歯車に接続され、中心部に第4のターゲットが配置された歯車を持つ第5の回転体と、前記第5の回転体の回転角を検出する第4の検出手段とを配置したことを特徴とする回転角およびトルク検出装置。
- 第1のターゲットと第2のターゲットの着磁極数を同一にし、第1の回転体の回転角と第2の回転体の回転角を前記第1、第2のターゲットの磁界方向変化として第1、第2の検出手段より検出し、前記第1、第2の回転体の回転角差よりトルク算出する請求項2に記載の回転角およびトルク検出装置。
- 第1、第2、第3、第4の検出手段は磁気検出素子からなり、第3、第4のターゲットは単極磁石からなる請求項2に記載の回転角およびトルク検出装置。
- 第3の回転体の歯車に順次接続され、歯数がそれぞれ異なる歯車を有する第4の回転体及び第5の回転体の回転角差と前記第4の回転体ないし前記第5の回転体の回転角を組合わせて前記第3の回転体の多回転角を算出する請求項2に記載の回転角およびトルク検出装置。
- 第3の回転体の歯車に順次接続され、歯数がそれぞれ異なる歯車を有する第4の回転体及び第5の回転体の回転角差と前記第4の回転体ないし前記第5の回転体の回転角と第1のターゲットより求められた第1の回転体の回転角を組合わせて前記第1の回転体の多回転角を算出する請求項2に記載の回転角およびトルク検出装置。
- 入力軸と出力軸の間にトーションバーを設けた請求項2に記載の回転角およびトルク検出装置。
- 第1、第2の検出手段より算出した回転角を常に比較して回転角差が規定値内であるか否かを確認する手段を有することを特徴とする請求項2に記載の回転角およびトルク検出装置。
- 第1ないし第2の検出手段より算出補正した回転角と第3ないし第4の検出手段より算出補正した回転角を常に比較して回転角差が規定値内であるか否かを確認する手段を有することを特徴とする請求項2に記載の回転角およびトルク検出装置。
- 第1、第2、第3、第4の回転体を組込み後、第1、第2、第3、第4の検出手段から出力される正弦波信号と余弦波信号の感度を記憶する不揮発性のメモリを有し、電源投入時毎に各感度にて前記正弦波信号と余弦波信号の補正を行うことを特徴とする請求項2に記載の回転角およびトルク検出装置。
- 第1ないし第4の検出手段としての各磁気検出素子の感度を記憶するときに感度が規定値内であるか否かを確認する手段を有することを特徴とする請求項10に記載の回転角およびトルク検出装置。
- 第1ないし第4の検出手段としての各磁気検出素子の信号出力の振幅中心を記憶する不揮発性のメモリを有し、電源投入時毎に各振幅中心にて正弦波信号と余弦波信号の補正を行うことを特徴とする請求項2に記載の絶対回転角およびトルク検出装置。
- 第1ないし第4の検出手段としての各磁気検出素子の信号出力の振幅中心が規定値内であるか否かを確認する手段を有することを特徴とする請求項2に記載の回転角およびトルク検出装置。
- 第1ないし第4の検出手段としての各磁気検出素子の任意の特定位置を判断する手段を有し、その位置での正弦波信号、余弦波信号の値を記憶し、特定位置からの絶対回転角を検出することを特徴とする請求項2に記載の回転角およびトルク検出装置。
- 第1ないし第4の検出手段としての各磁気検出素子の任意の特定位置を判断する手段を有し、その位置での正弦波信号、余弦波信号より算出される絶対回転角を記憶し、特定位置からの絶対回転角を検出することを特徴とする請求項2に記載の回転角およびトルク検出装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006000342A JP2007183121A (ja) | 2006-01-05 | 2006-01-05 | 回転角およびトルク検出装置 |
| US11/815,472 US20090211374A1 (en) | 2006-01-05 | 2006-12-28 | Rotation angle and torque detection apparatus |
| EP06843563A EP1845352A1 (en) | 2006-01-05 | 2006-12-28 | Device for detecting rotation angle and torque |
| PCT/JP2006/326185 WO2007077910A1 (ja) | 2006-01-05 | 2006-12-28 | 回転角およびトルク検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006000342A JP2007183121A (ja) | 2006-01-05 | 2006-01-05 | 回転角およびトルク検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007183121A true JP2007183121A (ja) | 2007-07-19 |
Family
ID=38228259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006000342A Withdrawn JP2007183121A (ja) | 2006-01-05 | 2006-01-05 | 回転角およびトルク検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20090211374A1 (ja) |
| EP (1) | EP1845352A1 (ja) |
| JP (1) | JP2007183121A (ja) |
| WO (1) | WO2007077910A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021113692A (ja) * | 2020-01-16 | 2021-08-05 | 株式会社ジェイテクト | 回転角度検出装置 |
| JP2023164393A (ja) * | 2022-04-29 | 2023-11-10 | メソード・エレクトロニクス・マルタ・リミテッド | 回転位置センサ |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006085499A1 (ja) * | 2005-02-10 | 2006-08-17 | Matsushita Electric Industrial Co., Ltd. | 回転角度およびトルク検出装置 |
| US7775129B2 (en) * | 2006-04-10 | 2010-08-17 | Panasonic Corporation | Rotation angle sensor |
| DE102009021081B4 (de) * | 2008-07-18 | 2017-07-06 | Asm Automation Sensorik Messtechnik Gmbh | Magnetischer Winkelsensor |
| US20110121823A1 (en) * | 2009-11-24 | 2011-05-26 | Gm Global Encoder Gear And Sensor Assembly | Meshing encoder gear and sensor assembly |
| US8810237B2 (en) * | 2009-12-28 | 2014-08-19 | Showa Corporation | Relative angle detection device, rotation angle detection device, relative angle detection method, and rotation angle detection method |
| JP6239342B2 (ja) * | 2013-10-24 | 2017-11-29 | 日立金属株式会社 | 車両用検出装置 |
| US10151650B2 (en) * | 2016-04-12 | 2018-12-11 | Honeywell International Inc. | Torque measurement assemblies |
| JP7005341B2 (ja) * | 2017-12-27 | 2022-01-21 | 株式会社Soken | トルク検出装置 |
| DE102019119670A1 (de) * | 2019-07-19 | 2021-01-21 | Infineon Technologies Ag | Umdrehungszähler und Abtasten eines Drehwinkels |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2936684B2 (ja) * | 1990-09-27 | 1999-08-23 | アイシン精機株式会社 | 回転センサ |
| JP2002213944A (ja) * | 2001-01-18 | 2002-07-31 | Niles Parts Co Ltd | 回転角測定装置 |
| JP2003114103A (ja) * | 2001-10-02 | 2003-04-18 | Koyo Seiko Co Ltd | 回転角検出装置、トルク検出装置及び舵取装置 |
| JP2003270062A (ja) * | 2002-03-13 | 2003-09-25 | Koyo Seiko Co Ltd | 回転角度検出装置、トルク検出装置及び舵取装置 |
| JP4474872B2 (ja) * | 2003-09-02 | 2010-06-09 | パナソニック株式会社 | 絶対回転角およびトルク検出装置 |
| JP2005106613A (ja) * | 2003-09-30 | 2005-04-21 | Koyo Seiko Co Ltd | 回転角度検出装置及びトルク検出装置 |
| JP2005257364A (ja) * | 2004-03-10 | 2005-09-22 | Matsushita Electric Ind Co Ltd | 回転角度・トルク検出装置 |
| JP2006275558A (ja) * | 2005-03-28 | 2006-10-12 | Matsushita Electric Ind Co Ltd | 絶対回転角検出機能付きトルク検出装置 |
-
2006
- 2006-01-05 JP JP2006000342A patent/JP2007183121A/ja not_active Withdrawn
- 2006-12-28 WO PCT/JP2006/326185 patent/WO2007077910A1/ja not_active Ceased
- 2006-12-28 EP EP06843563A patent/EP1845352A1/en not_active Withdrawn
- 2006-12-28 US US11/815,472 patent/US20090211374A1/en not_active Abandoned
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021113692A (ja) * | 2020-01-16 | 2021-08-05 | 株式会社ジェイテクト | 回転角度検出装置 |
| JP7400485B2 (ja) | 2020-01-16 | 2023-12-19 | 株式会社ジェイテクト | 回転角度検出装置 |
| JP2023164393A (ja) * | 2022-04-29 | 2023-11-10 | メソード・エレクトロニクス・マルタ・リミテッド | 回転位置センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1845352A1 (en) | 2007-10-17 |
| US20090211374A1 (en) | 2009-08-27 |
| WO2007077910A1 (ja) | 2007-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7583080B2 (en) | Rotation angle detection device and rotation angle correction method | |
| JP2006220530A (ja) | 絶対回転角度検出装置 | |
| JP5081553B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| US7775129B2 (en) | Rotation angle sensor | |
| KR100807179B1 (ko) | 회전각도 검출장치, 토크 검출장치 및 스티어링 장치 | |
| JP6877170B2 (ja) | ロータリエンコーダ及びその絶対角度位置検出方法 | |
| CN108426587B (zh) | 旋转编码器 | |
| KR102195533B1 (ko) | 로터리 인코더 및 로터리 인코더의 각도 보정 방법 | |
| US7202659B2 (en) | Rotation angle-detecting device | |
| JP2006220529A (ja) | 絶対回転角度およびトルク検出装置 | |
| US8810239B2 (en) | Angle sensor | |
| US20110303001A1 (en) | Rotary angle and rotary torque sensing device | |
| JP2007183121A (ja) | 回転角およびトルク検出装置 | |
| US20090320613A1 (en) | Rotation angle and torque detection device | |
| JP4982925B2 (ja) | 回転角度検出装置 | |
| EP4100701A1 (en) | Position sensor system using equidistantly spaced magnetic sensor arrays | |
| JP2023538316A (ja) | 磁気ターンカウンタエラーを検出するためのシステム及び方法 | |
| JP4759845B2 (ja) | 回転角度検出装置 | |
| JP2005315696A (ja) | 回転体の回転角度検出装置 | |
| WO2007094196A1 (ja) | トルク検出装置および回転角度検出装置 | |
| JP6959133B2 (ja) | トルクセンサ | |
| JP2006275558A (ja) | 絶対回転角検出機能付きトルク検出装置 | |
| JP2007187500A (ja) | 回転角検出装置 | |
| JP5193930B2 (ja) | 微小角度検出センサ | |
| CN117897602A (zh) | 扭矩测定装置、扭矩测定装置用的磁场产生装置以及扭矩测定装置用的磁场检测装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081113 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091127 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20100716 |