JP2007183155A - 回転角度検出装置および回転角度検出装置付き軸受 - Google Patents
回転角度検出装置および回転角度検出装置付き軸受 Download PDFInfo
- Publication number
- JP2007183155A JP2007183155A JP2006001233A JP2006001233A JP2007183155A JP 2007183155 A JP2007183155 A JP 2007183155A JP 2006001233 A JP2006001233 A JP 2006001233A JP 2006001233 A JP2006001233 A JP 2006001233A JP 2007183155 A JP2007183155 A JP 2007183155A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic sensor
- rotation angle
- rotation
- sensor array
- pixels
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 87
- 230000005389 magnetism Effects 0.000 claims description 29
- 238000012935 Averaging Methods 0.000 claims description 9
- 230000010354 integration Effects 0.000 claims description 8
- 238000003491 array Methods 0.000 abstract description 39
- 238000005096 rolling process Methods 0.000 description 9
- 239000004065 semiconductor Substances 0.000 description 9
- 230000000694 effects Effects 0.000 description 7
- 238000010187 selection method Methods 0.000 description 7
- 230000003321 amplification Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000003199 nucleic acid amplification method Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 238000009826 distribution Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
Images




Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
- Rolling Contact Bearings (AREA)
Abstract
【課題】 検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置、およびその回転角度検出装置を備えた軸受を提供する。
【解決手段】 磁気発生手段4にその回転中心Oの軸方向に対向して非回転側部材2に配置された磁気センサアレイ5A〜5Dと、これら磁気センサアレイ5A〜5Dの出力から磁気発生手段4の回転角度を算出する角度計算手段17とを備える。磁気センサアレイ5A〜5Dを走査するスキャン回路10は、磁気センサアレイ5A〜5Dの信号読み出し時に、隣合う複数の画素を同時に選択することが可能な画素選択回路19を有し、複数の画素を同時に選択しながら、順次走査するものとする。
【選択図】 図3
【解決手段】 磁気発生手段4にその回転中心Oの軸方向に対向して非回転側部材2に配置された磁気センサアレイ5A〜5Dと、これら磁気センサアレイ5A〜5Dの出力から磁気発生手段4の回転角度を算出する角度計算手段17とを備える。磁気センサアレイ5A〜5Dを走査するスキャン回路10は、磁気センサアレイ5A〜5Dの信号読み出し時に、隣合う複数の画素を同時に選択することが可能な画素選択回路19を有し、複数の画素を同時に選択しながら、順次走査するものとする。
【選択図】 図3
Description
この発明は、各種の機器における回転検出、例えば小型モータの回転制御のための回転検出や、事務機器の位置検出のための回転検出に用いられる回転角度検出装置、およびその回転角度検出装置を備えた軸受に関する。
小型の機器に組み込み可能で、かつ高精度の回転角度検出が可能な回転角度検出装置として、磁気センサアレイを用いるものが提案されている(例えば特許文献1)。これは、磁気センサ素子(MAGFET)を多数並べた磁気センサアレイを、信号増幅回路、AD変換回路、およびデジタル信号処理回路とともにシリコンチップ等のセンサチップに集積し、このセンサチップを、回転側部材に配置される磁石に対向配置したものである。この場合、磁石は回転中心回りの円周方向異方性を有するものとされ、前記センサチップ上では、仮想の矩形の4辺における各辺に沿ってライン状の4個の磁気センサアレイが配置される。
このように構成された回転角度検出装置では、各磁気センサアレイでセンサチップに垂直な磁界分布を検出し、これら磁気センサアレイの出力を信号増幅回路およびAD変換回路を経てデジタル信号処理回路に読み出し、デジタル信号処理回路により、各磁気センサアレイ上での前記磁界分布のNS境界線に相当するゼロクロス位置を検出して磁石の回転角度を算出する。
このように構成された回転角度検出装置では、各磁気センサアレイでセンサチップに垂直な磁界分布を検出し、これら磁気センサアレイの出力を信号増幅回路およびAD変換回路を経てデジタル信号処理回路に読み出し、デジタル信号処理回路により、各磁気センサアレイ上での前記磁界分布のNS境界線に相当するゼロクロス位置を検出して磁石の回転角度を算出する。
この場合、センサチップの大きさは磁気センサアレイの大きさに左右されるため、磁気センサアレイを小さくすることで回転角度検出装置全体を小型化できる。また、磁気センサアレイを小さくすると、センサチップの使用面積を縮小できるので、製造コストを低減できる効果も得られる。
特開2003−37133号公報
ところで、上記構成の回転角度検出装置では、磁気センサアレイ上で検出される2つのゼロクロス位置間の距離に角度検出精度が依存するため、上記したように磁気センサアレイを小さくすることで2つのゼロクロス位置間の距離が短くなると検出精度が悪化してしまうという問題を有する。
この問題を解決する対策として、例えば磁気センサアレイから読み出されるセンサ信号を積算したり、平均値をとることによりノイズの影響を抑えることも考えられるが、この場合には角度検出レートが低下してしまうことになる。
この問題を解決する対策として、例えば磁気センサアレイから読み出されるセンサ信号を積算したり、平均値をとることによりノイズの影響を抑えることも考えられるが、この場合には角度検出レートが低下してしまうことになる。
このような理由により、検出速度を落とさず、かつ高い検出精度を保ちつつ、センサチップの小型化を図ることで、製造コストを低減できる技術が望まれている。また、1つの回転角度検出装置を様々な用途に適用可能とするために、必要に応じて、検出速度を優先するか、検出精度を優先するかを選択できる機能を有する回転角度検出装置も望まれている。
この発明の目的は、検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置、およびその回転角度検出装置を備えた軸受を提供することである。
この発明の他の目的は、必要に応じて、検出速度を優先するか、検出精度を優先するかを選択できる回転角度検出装置を提供することである。
この発明の他の目的は、必要に応じて、検出速度を優先するか、検出精度を優先するかを選択できる回転角度検出装置を提供することである。
この発明の回転角度検出装置は、回転側部材に配置され回転中心回りの円周方向異方性を有する磁気発生手段と、この磁気発生手段に回転中心の軸方向に対向して非回転側部材に配置された磁気センサアレイと、この磁気センサアレイの出力から磁気発生手段の回転角度を算出する角度計算手段とを備えた回転角度検出装置において、前記磁気センサアレイを走査するスキャン回路は、磁気センサアレイの信号読み出し時に、隣合う複数の画素を同時に選択することが可能な画素選択回路を有し、複数の画素を同時に選択しながら、順次走査するものとしたことを特徴とする。
この構成によると、スキャン回路による磁気センサアレイの信号読み出し時に、画素選択回路で複数の画素を同時に選択することで、複数の画素を同時に選択しながら、順次走査することができるようにしているので、信号読み出し時間を短縮して検出速度を上げることができる。また、順次走査における前後の画素選択において一部の画素が重複するような画素選択動作を画素選択回路に行わせる場合には、センサノイズの影響を減らして安定した検出を行うことができる。さらに、複数の画素を同時に選択して順次走査すると信号読み出し時間を短縮できることを利用して、複数回の走査を行う場合には、そのセンサノイズ低減効果により、磁気センサアレイのサイズを小さくしたことによる角度分解能の劣化分を補うことができる。そのため、角度分解能を保ったまま小型化が可能となり、その結果、検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置とすることができる。
この構成によると、スキャン回路による磁気センサアレイの信号読み出し時に、画素選択回路で複数の画素を同時に選択することで、複数の画素を同時に選択しながら、順次走査することができるようにしているので、信号読み出し時間を短縮して検出速度を上げることができる。また、順次走査における前後の画素選択において一部の画素が重複するような画素選択動作を画素選択回路に行わせる場合には、センサノイズの影響を減らして安定した検出を行うことができる。さらに、複数の画素を同時に選択して順次走査すると信号読み出し時間を短縮できることを利用して、複数回の走査を行う場合には、そのセンサノイズ低減効果により、磁気センサアレイのサイズを小さくしたことによる角度分解能の劣化分を補うことができる。そのため、角度分解能を保ったまま小型化が可能となり、その結果、検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置とすることができる。
この発明において、前記磁気センサアレイは、前記画素となる磁気センサ素子をライン状に並べたものであって、上記回転中心に垂直な平面内で仮想の矩形の4辺における各辺に配置して4個設けたものであっても良い。この構成の場合、矩形に配置された磁気センサアレイで囲まれた内部に、磁気センサアレイの出力を処理して回転角度を算出する信号処理回路を配置できるので、センサチップ上に磁気センサアレイと信号処理回路を共に集積する場合にコンパクトに構成でき、センサチップの回路面積を小さくできる。
この発明において、前記スキャン回路に対して、同時に選択する画素数を外部から設定するための手段を設けても良い。この構成の場合、信号読み出し時間を短縮して検出速度を上げたい場合に、外部から選択する画素数を容易に設定できる。
この発明において、前記スキャン回路に対して、走査パターンを外部から設定するための手段を設けても良い。この構成の場合、ノイズの影響を減らして安定した検出を行いたい場合に、そのような走査パターンとなるように外部から容易に設定することができる。このように、適用する目的によって、選択画素数と走査パターンを可変設定できることから、1つの回転角度検出装置を様々な用途に使用することが可能となる。
この発明において、磁気センサアレイの順次走査を繰り返した複数回のセンサ出力信号を積算または平均化処理する手段を設け、角度計算手段は、この積算または平均化した結果を元に回転角度を算出するものとしても良い。このように複数回の走査を行い、その複数回分のセンサ信号を積算あるいは平均化することにより、読み出されるセンサ信号のノイズを低減できる。
この発明の回転角度検出装置付き軸受は、この発明における上記いずれかの構成の回転角度検出装置を軸受に取付けたものである。その場合に、磁気発生手段は、回転側部材である回転側軌道輪に配置する、磁気アレイセンサは、非回転側部材である静止側軌道輪に配置する。
このように、軸受に回転角度検出装置を一体化することで、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れる。その場合に、回転角度検出装置は、検出速度が早く、かつ高い検出精度が得られ、小型化も可能であるため、高速回転する機器の軸受、高速応答が求められる制御システム等での軸受、あるいは小型機器の軸受に適用できて、高精度の回転角度検出が可能となる。
このように、軸受に回転角度検出装置を一体化することで、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れる。その場合に、回転角度検出装置は、検出速度が早く、かつ高い検出精度が得られ、小型化も可能であるため、高速回転する機器の軸受、高速応答が求められる制御システム等での軸受、あるいは小型機器の軸受に適用できて、高精度の回転角度検出が可能となる。
この発明の回転角度検出装置は、回転側部材に配置され回転中心回りの円周方向異方性を有する磁気発生手段と、この磁気発生手段に回転中心の軸方向に対向して非回転側部材に配置された磁気センサアレイと、この磁気センサアレイの出力から磁気発生手段の回転角度を算出する角度計算手段とを備えた回転角度検出装置において、前記磁気センサアレイを走査するスキャン回路は、磁気センサアレイの信号読み出し時に、隣合う複数の画素を同時に選択することが可能な画素選択回路を有し、複数の画素を同時に選択しながら、順次走査するものとしたため、検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置とすることができる。
この発明の回転角度検出装置付き軸受は、この発明の回転角度検出装置を軸受に取付けたため、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れ、高速回転する機器の軸受、高速応答が求められる制御システム等での軸受、あるいは小型機器の軸受に適用できて、高精度の回転角度検出が可能となる。
この発明の回転角度検出装置付き軸受は、この発明の回転角度検出装置を軸受に取付けたため、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れ、高速回転する機器の軸受、高速応答が求められる制御システム等での軸受、あるいは小型機器の軸受に適用できて、高精度の回転角度検出が可能となる。
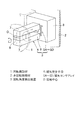
この発明の一実施形態を図面と共に説明する。図1は、この実施形態の回転角度検出装置の原理構成を示す。回転側部材1および非回転側部材2は、相対的に回転する回転側および非回転側の部材のことである。この回転角度検出装置3は、回転側部材1に配置された磁気発生手段4と、非回転側部材2に配置された4個のライン状の磁気センサアレイ5A〜5Dと、その出力を処理して回転角度を算出する信号処理回路9(図2)とを備える。
磁気発生手段4は、発生する磁気が回転側部材1の回転中心O回りの円周方向異方性を有するものであり、永久磁石の単体、あるいは永久磁石と磁性材の複合体からなる。ここでは、磁気発生手段4は、1つの永久磁石6を2つの磁性体ヨーク7,7で挟んで一体化し概形が二叉のフォーク状とされ、一方の磁性体ヨーク7の一端がN磁極、他方の磁性体ヨーク7の一端がS磁極となる。磁気発生手段4をこのような構造とすることにより、シンプルでかつ堅牢に構成できる。この磁気発生手段4は、回転側部材1の回転中心Oが磁気発生手段4の中心と一致するように回転側部材1に取付けられ、回転側部材1の回転によって上記回転中心Oの回りをN磁極およびS磁極が旋回移動する。
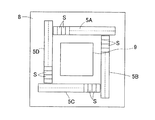
磁気センサアレイ5A〜5Dは磁気発生手段4の磁気を検出するセンサであって、回転側部材1の回転中心Oの軸方向に向けて磁気発生手段4と対向するように、非回転側部材2に配置される。図2に示すように、各磁気センサアレイ5A〜5Dは、その画素となる複数の磁気センサ素子Sをそれぞれライン状に並べて構成され、上記回転中心Oに垂直な平面内で仮想の矩形の4辺における各辺に沿って配置される。この場合、前記矩形の中心は、回転側部材1の回転中心Oに一致する。このように構成される各磁気センサアレイ5A〜5Dは、非回転側部材2に取付けられる一つの半導体チップ8の前記磁気発生手段4と対向する面上に形成される。半導体チップ8は、例えばシリコンチップである。
図3には、磁気センサアレイ5A〜5Dと、その出力を処理して回転角度を算出する信号処理回路9の概略構成をブロック図で示す。信号処理回路9は、磁気センサアレイ5A〜5Dと共に、前記半導体チップ8の上に集積される。この場合、矩形に配置された磁気センサアレイ5A〜5Dで囲まれた内部に信号処理回路9が配置される。これにより、半導体チップ8の上に磁気センサアレイ5A〜5Dと信号処理回路9をコンパクトに配置でき、半導体チップ8の回路面積を小さくできる。同図において、スキャン回路10、信号増幅回路11、AD変換回路12、データ積算・平均化処理手段13、メモリ14および座標カウンタ15は、各磁気センサアレイ5A〜5Dに対して個別に設けられる。スキャン回路10は、磁気センサアレイ5A〜5Dの出力を走査して読み出すものである。信号増幅回路11は読み出された磁気センサアレイ5A〜5Dの出力を増幅するものであり、AD変換回路12は信号増幅回路11で増幅された信号をデジタル信号に変換するものである。データ積算・平均化処理手段13およびメモリ14は、必要に応じて設けられる回路部分であり、その説明はここでは省略する。
例えば、磁気センサアレイ5Aの出力は、対応するスキャン回路10で走査して順次読み出され、さらに対応する信号増幅回路11で増幅され、その増幅信号が対応するAD変換回路12でデジタル信号に変換され、データ積算・平均化処理手段13が設けられる場合にはこの回路部分での処理を経てゼロクロス位置検出手段16に入力される。また、スキャン回路10は磁気センサアレイ5Aの出力の走査において、選択した磁気センサ素子Sの配列位置情報を座標カウンタ15に送信し、これに応答して座標カウンタ15から選択された磁気センサ素子Sの座標情報が前記ゼロクロス位置検出手段16に入力される。これにより、ゼロクロス位置検出手段16では、AD変換回路12からデジタル信号として順次入力されてくる各磁気センサ素子Sのセンサ信号と、座標カウンタ15から入力されてくる座標情報とが関連づけられる。ゼロクロス位置検出手段16は各磁気センサアレイ5A〜5Dに対して共通のものであり、他の磁気センサアレイ5B〜5Dの出力も同様にゼロクロス位置検出手段16に入力されて座標情報と関連づけられる。ゼロクロス位置検出手段16は、前記各磁気センサアレイ5A〜5Dの出力から前記磁気発生手段4による磁界分布のゼロクロス位置を検出するものである。角度計算手段17は、ゼロクロス位置検出手段16で検出されたゼロクロス位置に基づき、磁気発生手段4の回転角度を算出するものである。
前記スキャン回路10は、その走査を制御するスキャン制御回路18と、磁気センサアレイ5A〜5Dの信号読み出し時に複数の画素(磁気センサ素子S)を同時に選択する走査方法を可能とする画素選択回路19とを有する。図4には、このスキャン回路10と磁気センサアレイ5A〜5Dの接続構成を概略的に示す。具体的には、画素選択回路19は、例えば1回の画素選択動作において、磁気センサアレイ5A〜5Dにおける隣接する2つの画素を同時に選択し、その選択情報に基づいてスキャン制御回路18を動作させる。これにより、スキャン回路10は、S1+S2,S3+S4,S5+S6,…という順序で磁気センサアレイ5A〜5Dの画素Sを走査することができる。つまり、磁気センサアレイ5A〜5Dの構成画素として並ぶ磁気センサ素子Sの隣接する複数個(この場合は2個)を並列接続された画素組とし、信号読み出しにおいて各画素組を順次走査することになる。1回ごとに同時選択された複数画素の出力信号は加算され、その合計信号が信号増幅回路11に入力され、AD変換回路12でデジタル数値に変換され、さらにデータ積算・平均化処理手段13が設けられる場合にはこの回路部分での処理を経てゼロクロス位置検出手段16に入力される。
このように、スキャン回路10による磁気センサアレイ5A〜5Dの信号読み出し走査で、同時に複数の画素を選択することは、磁気センサ素子Sの並列接続個数を増やすことになるので、各磁気センサ素子Sの発生するノイズが平均化され、ノイズ低減の効果が得られる。
画素選択回路19による画素選択例としては、このほか、S1+S2+S3,S4+S5+S6,…のように隣接する3画素を同時に読み出すものであっても良い。この場合には、磁気センサ素子Sの並列接続個数がさらに多くなるので、ノイズ低減効果がさらに大きくなる。また、読み出す画素数は1/3に減少する。
さらに、画素選択回路19による他の画素選択例として、S1+S2,S2+S3,S3+S4,…のように前回の選択に含まれる画素と、次回の選択に含まれる画素とが一部重複するようにしても良い。この場合も、磁気センサ素子Sの並列接続個数が増えるのでノイズ低減効果があるが、読み出す画素数はほとんど変わらない。
このように、画素選択回路19による画素選択方法によって、信号読み出し時間を短縮して検出速度を上げられる場合と、信号読み出し時間の短縮はできないがノイズの影響を減らして安定した検出が行える場合とがあるので、この実施形態では、画素選択回路19による画素選択方法を外部から通信などによって設定可能な画素数設定手段31と走査パターン設定手段32とを、信号処理回路9の外側に設けている。画素数設定手段31は同時に読み出す画素数を設定するものであり、走査パターン設定手段32は、上記した画素の重複選択や重複度合い等の選択設定を行うものである。これらの設定は、例えば画素選択回路19の内部の不揮発メモリに記憶させておくことにより、電源オン時の画素選択回路19の画素選択方法を事前に設定することができる。なお、画素選択回路19の画素選択方法が変わると読み出されるセンサ信号と座標との関係が変化するので、画素選択回路19は座標カウンタ15の動作も対応させて制御するようにしている。
これにより、信号読み出し時間を短縮して検出速度を上げたい場合には、画素数設定手段31により複数画素を同時選択して読み出す画素選択方法を画素選択回路19に設定し、ノイズの影響を減らして安定した検出を行いたい場合には、画素を重複選択して読み出す画素選択方法を画素選択回路19に設定することができる。このように、適用する目的によって、選択画素数と走査パターンを可変設定できるので、1つの回転角度検出装置3を様々な用途に使用することが可能となる。
これにより、信号読み出し時間を短縮して検出速度を上げたい場合には、画素数設定手段31により複数画素を同時選択して読み出す画素選択方法を画素選択回路19に設定し、ノイズの影響を減らして安定した検出を行いたい場合には、画素を重複選択して読み出す画素選択方法を画素選択回路19に設定することができる。このように、適用する目的によって、選択画素数と走査パターンを可変設定できるので、1つの回転角度検出装置3を様々な用途に使用することが可能となる。
また、前記画素選択回路19による画素選択方法において、同時に複数画素を選択して順次走査を行うと、読み出し時間を短縮できるので、その短縮できた時間の分を、さらに複数回の走査に使用しても良い。すなわち、例えば、S1+S2,S3+S4,S5+S6,…という複数画素同時選択において、S1+S2,S1+S2,S3+S4,S3+S4,…のように読み出しても良い。図3の信号処理回路9におけるデータ積算・平均化処理手段13は、このように複数回の走査を行う場合に、複数回分のセンサ信号を積算あるいは平均化する回路である。メモリ14は、複数回の走査による各センサ信号を一時的に記憶しておくためのものである。このように複数回分のセンサ信号を積算あるいは平均化することにより、読み出されるセンサ信号のノイズを低減できる。
この回転角度検出装置3のように、4個の磁気センサアレイ5A〜5Dを仮想の矩形の各辺に沿わせて配置した構成の場合、磁気センサアレイ5A〜5Dのサイズを小さくすると、半導体チップ8の面積が小さくなり製造コストを低減できる。しかし、この場合に、前記矩形の対向する2辺に沿う例えば磁気センサアレイ5B,5Dの上に検出される2つのゼロクロス位置の間隔が小さくなるので、角度分解能は劣化する。ところが、上記したように複数回の走査を行うものとすれば、そのセンサノイズ低減効果により、磁気センサアレイ5A〜5Dのサイズを小さくしたことによる角度分解能の劣化分を補うことができるので、サイズを小さくしない場合と同等の角度分解能を保ったまま、半導体チップ8の面積を小さくすることができる。
図5および図6は、角度計算手段17による角度算出処理の説明図である。図5(A)〜(D)は、回転側部材1が回転している時の磁気センサアレイ5A〜5Dの出力波形図を示し、それらの横軸は各磁気センサアレイ5A〜5Dにおける磁気センサ素子Sの並び位置を、縦軸は検出磁界の強度をそれぞれ示す。
いま、図6に示す位置X1とX2に磁気発生手段4のN磁極とS磁極の境界であるゼロクロス位置があるとする。この状態で、各磁気センサアレイ5A〜5Dの出力が、図5(A)〜(D)に示す信号波形となる。したがって、ゼロクロス位置X1,X2は、磁気センサアレイ5A〜5Dの出力から直線近似することで算出できる。
角度計算は、次式(1)で行うことができる。
θ=tan-1(2L/b) ……(1)
ここで、θは、磁気発生手段4の回転角度を絶対角度で示した値である。2Lは、矩形に並べられる各磁気センサアレイ5A〜5Dの1辺の長さである。bは、ゼロクロス位置X1,X2間の横方向長さである。
ゼロクロス位置X1,X2が磁気センサアレイ5B,5Dにある場合には、それらの出力から得られるゼロクロス位置データにより、上記と同様にして回転角度θが算出される。
このように、この回転角度検出装置3では、磁界分布のゼロクロスから回転角度を算出するので、検出精度を向上させることができる。また、磁界パターンから角度情報を取得するので、回転角度検出装置3の軸合わせが不要となり、取付けが容易となる。
いま、図6に示す位置X1とX2に磁気発生手段4のN磁極とS磁極の境界であるゼロクロス位置があるとする。この状態で、各磁気センサアレイ5A〜5Dの出力が、図5(A)〜(D)に示す信号波形となる。したがって、ゼロクロス位置X1,X2は、磁気センサアレイ5A〜5Dの出力から直線近似することで算出できる。
角度計算は、次式(1)で行うことができる。
θ=tan-1(2L/b) ……(1)
ここで、θは、磁気発生手段4の回転角度を絶対角度で示した値である。2Lは、矩形に並べられる各磁気センサアレイ5A〜5Dの1辺の長さである。bは、ゼロクロス位置X1,X2間の横方向長さである。
ゼロクロス位置X1,X2が磁気センサアレイ5B,5Dにある場合には、それらの出力から得られるゼロクロス位置データにより、上記と同様にして回転角度θが算出される。
このように、この回転角度検出装置3では、磁界分布のゼロクロスから回転角度を算出するので、検出精度を向上させることができる。また、磁界パターンから角度情報を取得するので、回転角度検出装置3の軸合わせが不要となり、取付けが容易となる。
とくに、この回転角度検出装置3では、スキャン回路10による磁気センサアレイ5A〜5Dの信号読み出し時に、画素選択回路19で複数の画素を同時に選択することで、複数の画素を同時に選択しながら、順次走査することができるようにしているので、信号読み出し時間を短縮して検出速度を上げることができる。また、順次走査における前後の画素選択において一部の画素が重複するような画素選択動作を画素選択回路19に行わせる場合には、センサノイズの影響を減らして安定した検出を行うことができる。さらに、複数の画素を同時に選択して順次走査すると信号読み出し時間を短縮できることを利用して、複数回の走査を行う場合には、そのセンサノイズ低減効果により、磁気センサアレイ5A〜5Dのサイズを小さくしたことによる角度分解能の劣化分を補うことができるので、角度分解能を保ったまま小型化が可能となる。その結果、検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置3とすることができる。
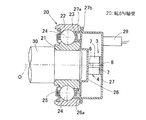
図7は、この実施形態の回転角度検出装置3を転がり軸受に組み込んだ例を示す。この転がり軸受20は、内輪21と外輪22の転走面間に、保持器23に保持された転動体24を介在させたものである。転動体24はボールからなり、この転がり軸受20は深溝玉軸受とされている。また、軸受空間の一端を覆うシール25が、外輪22に取付けられている。回転軸30が嵌合する内輪21は、転動体24を介して外輪22に支持されている。外輪22は、軸受使用機器のハウジング(図示せず)に設置されている。
内輪21には、磁気発生手段取付部材26が取付けられ、この磁気発生手段取付部材26に磁気発生手段4が取付けられている。磁気発生手段取付部材26は、内輪21の一端の内径孔を覆うように設けられ、外周縁に設けられた円筒部26aを、内輪21の肩部外周面に嵌合させることにより、内輪21に取付けられている。また、円筒部26aの近傍の側板部が内輪21の幅面に係合して軸方向の位置決めがなされている。
外輪22にはセンサ取付部材27が取付けられ、このセンサ取付部材27に、磁気センサアレイ5A〜5Dと信号処理回路9の集積された半導体チップ8が取付けられている。また、このセンサ取付部材27に、角度算出手段17の出力を取り出すための出力ケーブル29も取付けられている。センサ取付部材27は、外周部の先端円筒部27aを外輪22の内径面に嵌合させ、この先端円筒部27aの近傍に形成した鍔部27bを外輪22の幅面に係合させて軸方向の位置決めがなされている。
外輪22にはセンサ取付部材27が取付けられ、このセンサ取付部材27に、磁気センサアレイ5A〜5Dと信号処理回路9の集積された半導体チップ8が取付けられている。また、このセンサ取付部材27に、角度算出手段17の出力を取り出すための出力ケーブル29も取付けられている。センサ取付部材27は、外周部の先端円筒部27aを外輪22の内径面に嵌合させ、この先端円筒部27aの近傍に形成した鍔部27bを外輪22の幅面に係合させて軸方向の位置決めがなされている。
このように、軸受20に回転角度検出装置3を一体化することで、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れる。その場合に、回転角度検出装置3は、検出速度が早く、かつ高い検出精度が得られ、小型化も可能であるため、高速回転する機器の軸受、高速応答が求められる制御システム等での軸受、あるいは小型機器の軸受に適用できて、高精度の回転角度検出が可能となる。
1…回転側部材
2…非回転側部材
3…回転角度検出装置
4…磁気発生手段
5A〜5D…磁気センサアレイ
10…スキャン回路
13…データ積算・平均化処理手段
16…ゼロクロス位置検出手段
17…角度計算手段
19…画素選択回路
20…転がり軸受
31…画素数設定手段
32…走査パターン設定手段
O…回転中心
2…非回転側部材
3…回転角度検出装置
4…磁気発生手段
5A〜5D…磁気センサアレイ
10…スキャン回路
13…データ積算・平均化処理手段
16…ゼロクロス位置検出手段
17…角度計算手段
19…画素選択回路
20…転がり軸受
31…画素数設定手段
32…走査パターン設定手段
O…回転中心
Claims (6)
- 回転側部材に配置され回転中心回りの円周方向異方性を有する磁気発生手段と、この磁気発生手段に回転中心の軸方向に対向して非回転側部材に配置された磁気センサアレイと、この磁気センサアレイの出力から磁気発生手段の回転角度を算出する角度計算手段とを備えた回転角度検出装置において、
前記磁気センサアレイを走査するスキャン回路は、磁気センサアレイの信号読み出し時に、隣合う複数の画素を同時に選択することが可能な画素選択回路を有し、複数の画素を同時に選択しながら、順次走査するものとしたことを特徴とする回転角度検出装置。 - 請求項1において、前記磁気センサアレイは、前記画素となる磁気センサ素子をライン状に並べたものであって、上記回転中心に垂直な平面内で仮想の矩形の4辺における各辺に配置して4個設けた回転角度検出装置。
- 請求項1または請求項2において、前記スキャン回路に対して、同時に選択する画素数を外部から設定するための手段を設けた回転角度検出装置。
- 請求項1または請求項2において、前記スキャン回路に対して、走査パターンを外部から設定するための手段を設けた回転角度検出装置。
- 請求項1または請求項2において、磁気センサアレイの順次走査を繰り返した複数回のセンサ出力信号を積算または平均化処理する手段を設け、角度計算手段は、この積算または平均化した結果を元に回転角度を算出するものとした回転角度検出装置。
- 請求項1ないし請求項5のいずれか1項に記載の回転角度検出装置を備えた回転角度検出装置付き軸受。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006001233A JP2007183155A (ja) | 2006-01-06 | 2006-01-06 | 回転角度検出装置および回転角度検出装置付き軸受 |
| US11/521,561 US7609057B2 (en) | 2005-09-22 | 2006-09-15 | Rotation angle detector and bearing assembly using the same |
| DE602006010639T DE602006010639D1 (de) | 2005-09-22 | 2006-09-22 | Rotationswinkelmesser und Lageranordnung damit |
| EP09013563A EP2154485A2 (en) | 2005-09-22 | 2006-09-22 | Rotation angle detector andbearing assembly using the same |
| EP06019919A EP1767903B1 (en) | 2005-09-22 | 2006-09-22 | Rotation angle detector and bearing assembly using the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006001233A JP2007183155A (ja) | 2006-01-06 | 2006-01-06 | 回転角度検出装置および回転角度検出装置付き軸受 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007183155A true JP2007183155A (ja) | 2007-07-19 |
Family
ID=38339385
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006001233A Pending JP2007183155A (ja) | 2005-09-22 | 2006-01-06 | 回転角度検出装置および回転角度検出装置付き軸受 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007183155A (ja) |
-
2006
- 2006-01-06 JP JP2006001233A patent/JP2007183155A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3973983B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP2009080058A (ja) | 回転検出装置および回転検出装置付き軸受 | |
| US7797127B2 (en) | Method for determining two pseudo-sinusoidal signals in quadrature | |
| JP4883959B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| US7884600B2 (en) | Rotation angle detector and bearing with rotation angle detector | |
| US7615993B2 (en) | Magnetic line-type position-angle detecting device | |
| JP2003148999A (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP2008116291A (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP2007183155A (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| JP4845513B2 (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| JP2007089312A (ja) | モータ回転軸の角度検出装置 | |
| JP4869760B2 (ja) | 回転検出装置付き軸受 | |
| JP2007078402A (ja) | スロットルバルブの回転角度検出装置 | |
| JP4794219B2 (ja) | 磁気アレイセンサ回路およびこれを用いた回転検出装置 | |
| JP2008151803A (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP2007183198A (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| JP2007178267A (ja) | 磁気ラインセンサ式回転検出装置および回転検出装置付き軸受 | |
| JP2007256034A (ja) | 回転角度検出装置および検出装置付き軸受 | |
| JP2007183156A (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| JP5042510B2 (ja) | 回転速度信号出力付き回転角度検出装置および検出装置付き軸受 | |
| JP2007183199A (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| JP2007078552A (ja) | 多回転角度検出装置および多回転角度検出装置付き軸受 | |
| JP4553714B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP2007085890A (ja) | 事務機器のローラ回転検出装置付き軸受およびローラ駆動装置 | |
| JP2007315765A (ja) | 回転センサおよび回転センサ付き軸受 |