JP2007185014A - モータ制御装置の制御パラメータ算出方法、算出プログラムおよびモータ制御装置 - Google Patents
モータ制御装置の制御パラメータ算出方法、算出プログラムおよびモータ制御装置 Download PDFInfo
- Publication number
- JP2007185014A JP2007185014A JP2006000352A JP2006000352A JP2007185014A JP 2007185014 A JP2007185014 A JP 2007185014A JP 2006000352 A JP2006000352 A JP 2006000352A JP 2006000352 A JP2006000352 A JP 2006000352A JP 2007185014 A JP2007185014 A JP 2007185014A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- motor
- load
- frequency
- torque command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Control Of Electric Motors In General (AREA)
- Control Of Position Or Direction (AREA)
Abstract
【解決手段】負荷状態の異なる2つ以上の負荷周波数特性を用い、前記負荷周波数特性の位相が−180+α[deg](αは0以上の値)以下になる周波数領域での最大ゲインに基づいて、速度制御器の制御パラメータである速度応答周波数を算出する。負荷状態によって変化する共振周波数を1つの共振周波数と考えノッチフィルタの最適設定も同時に算出する。
【選択図】図1
Description
算出する(ステップS513〜S516)。
前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得、前記負荷周波数特性を用いて共振周波数を算出し、得られた前記共振周波数のうち、負荷状態の変化により変化した共振周波数群を1つの共振周波数とみなし、この共振周波数を中心周波数とするノッチフィルタの設定パターンを算出し、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記ノッチフィルタの設定パターンを算出する機能を有する。
負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得、
得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パ
ラメータおよび前記フィルタの制御パラメータを算出する機能を有する。これにより負荷状態が変化し周波数特性が変化しても算出された制御パラメータを用いることにより常に安定した制御を行うことができる。
前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得、
前記負荷周波数特性を用いて共振周波数を算出し、
得られた前記共振周波数のうち、負荷状態の変化により変化した共振周波数群を1つの共振周波数とみなし、この共振周波数を中心周波数とするノッチフィルタの設定パターンを算出し、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記ノッチフィルタの設定パターンを算出する機能を有する。

において、位相余裕α[deg]を用いて、位相が−180+α[deg]以下となる周波数領域を求める。図4においては区間Aと区間Bとなる。そしてその区間における最大ゲインGmax[dB]を求める。最大ゲインGmaxを求める区間を必要最低限としているため、位相が−180+α[deg]となる最も低い周波数より高い領域を用いるより処理時間を短くできる。前述したように、一巡伝達関数のゲイン特性はKvによって上下するが、正であるゲイン余裕β[dB]を用いて、次(数7)を満たすようにKvを求めれば、速度フィードバックループの一巡伝達関数の周波数特性において、位相が−180+α[deg]以下となる周波数領域でゲインが−β[dB]以下となり安定性は保証される。
波数ωvと総イナーシャJaが算出されたかをチェックする。もしまだ算出されていない負荷周波数特性があればその負荷周波数特性に対しステップS2、ステップS3を行う。もし、すべての負荷周波数特性に対し速度応答周波数が算出されたらステップS5に進む。
で算出された共振周波数の近いものを1つにまとめることにより、共振周波数変化を考慮したノッチフィルタの付加ができる。
2 負荷
3 位置検出器
4 機械系
5 モータ駆動装置
6 速度算出器
7 位置制御器
8 速度制御器
9 スイッチ部
10 第1のフィルタ部
11 トルク制御器
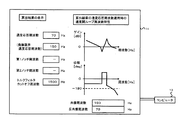
12 周波数特性測定用トルク指令作成器
13 コンピュータ
14 ディスプレイ
15 制御パラメータ調整部
Claims (7)
- 負荷が接続されたモータの検出速度と速度指令が一致するよう第1のトルク指令を生成する速度制御器と、前記第1のトルク指令、もしくは前記第1のトルク指令を1つ以上のフィルタを通した結果である第2のトルク指令に応じて前記モータを駆動するトルク制御器を有するモータ制御装置の制御パラメータ算出方法であって、前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記フィルタの制御パラメータを算出するモータ制御装置の制御パラメータ算出方法。
- 負荷が接続されたモータの検出速度と速度指令が一致するよう第1のトルク指令を生成する速度制御器と、前記第1のトルク指令、もしくは前記第1のトルク指令を1つ以上のフィルタを通した結果である第2のトルク指令に応じて前記モータを駆動するトルク制御器を有するモータ制御装置の制御パラメータ算出方法であって、前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得、前記負荷周波数特性を用いて共振周波数を算出し、得られた前記共振周波数のうち、負荷状態の変化により変化した共振周波数群を1つの共振周波数とみなし、この共振周波数を中心周波数とするノッチフィルタの設定パターンを算出し、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記ノッチフィルタの設定パターンを算出するモータ制御装置の制御パラメータ算出方法。
- 負荷が接続されたモータの検出速度と速度指令が一致するよう第1のトルク指令を生成する速度制御器と、前記第1のトルク指令、もしくは前記第1のトルク指令を1つ以上のフィルタを通した結果である第2のトルク指令に応じて前記モータを駆動するトルク制御器を有するモータ制御装置の制御パラメータ算出プログラムであって、コンピュータに、前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得るステップと、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記フィルタの制御パラメータを算出するステップと、を実行させるためのモータ制御装置の制御パラメータ算出プログラム。
- 負荷が接続されたモータの検出速度と速度指令が一致するよう第1のトルク指令を生成する速度制御器と、前記第1のトルク指令、もしくは前記第1のトルク指令を1つ以上のフィルタを通した結果である第2のトルク指令に応じて前記モータを駆動するトルク制御器を有するモータ制御装置の制御パラメータ算出プログラムであって、コンピュータに、前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得るステップと、前記負荷周波数特性を用いて共振周波数を算出するステップと、得られた前記共振周波数のうち、負荷状態の変化により変化した共振周波数群を1つの共振周波数とみなし、この共振周波数を中心周波数とするノッチフィルタの設定パターンを算出するステップと、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記ノッチフィルタの設定パターンを算出するステップと、を実行させるためのモータ制御装置の制御パラメータ算出プログラム。
- 請求項3から請求項4いずれかに記載のプログラムを記録した媒体。
- 負荷が接続されたモータの検出速度と速度指令が一致するよう第1のトルク指令を生成する速度制御器と、前記第1のトルク指令、もしくは前記第1のトルク指令を1つ以上のフ
ィルタを通した結果である第2のトルク指令に応じて前記モータを駆動するトルク制御器を有するモータ制御装置であって、前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得る機能と、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記フィルタの制御パラメータを算出し、算出された制御パラメータに基づいて調整する機能と、を有するモータ制御装置。 - 負荷が接続されたモータの検出速度と速度指令が一致するよう第1のトルク指令を生成する速度制御器と、前記第1のトルク指令、もしくは前記第1のトルク指令を1つ以上のフィルタを通した結果である第2のトルク指令に応じて前記モータを駆動するトルク制御器を有するモータ制御装置であって、前記負荷の状態が異なる少なくとも2つ以上の状態における前記トルク制御器の入力端からモータ速度までの周波数特性である負荷周波数特性を得る機能と、前記負荷周波数特性を用いて共振周波数を算出する機能と、得られた前記共振周波数のうち、負荷状態の変化により変化した共振周波数群を1つの共振周波数とみなし、この共振周波数を中心周波数とするノッチフィルタの設定パターンを算出する機能と、得られた全ての負荷周波数特性に対し速度制御系が安定となる前記速度制御器の制御パラメータおよび前記ノッチフィルタの制御パターンを算出し、算出された制御パラメータにおよびおよび前記ノッチフィルタの設定パターンに基づいて調整する機能と、を有するモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006000352A JP2007185014A (ja) | 2006-01-05 | 2006-01-05 | モータ制御装置の制御パラメータ算出方法、算出プログラムおよびモータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006000352A JP2007185014A (ja) | 2006-01-05 | 2006-01-05 | モータ制御装置の制御パラメータ算出方法、算出プログラムおよびモータ制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007185014A true JP2007185014A (ja) | 2007-07-19 |
Family
ID=38340640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006000352A Pending JP2007185014A (ja) | 2006-01-05 | 2006-01-05 | モータ制御装置の制御パラメータ算出方法、算出プログラムおよびモータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007185014A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009268292A (ja) * | 2008-04-28 | 2009-11-12 | Panasonic Corp | モータ駆動装置 |
| JP2012249342A (ja) * | 2011-05-25 | 2012-12-13 | Hitachi Ltd | 電動機駆動システムおよび方法 |
| CN107024617A (zh) * | 2017-04-21 | 2017-08-08 | 上海电气集团股份有限公司 | 一种电机转矩振荡频率辨识方法 |
| JP2017174180A (ja) * | 2016-03-24 | 2017-09-28 | ファナック株式会社 | サーボ制御装置、サーボ制御方法及びサーボ制御プログラム |
| JP2018171665A (ja) * | 2017-03-31 | 2018-11-08 | セイコーエプソン株式会社 | 装置、ロボット、およびロボットシステム |
| CN109941855A (zh) * | 2017-12-21 | 2019-06-28 | 株式会社日立制作所 | 电梯装置的控制装置及控制方法 |
| KR20230154976A (ko) * | 2021-04-21 | 2023-11-09 | 미쓰비시덴키 가부시키가이샤 | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 |
| WO2024185790A1 (ja) * | 2023-03-07 | 2024-09-12 | オムロン株式会社 | サーボパラメータの調整方法、および調整装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08253950A (ja) * | 1995-03-15 | 1996-10-01 | Yanmar Diesel Engine Co Ltd | バックホーの制御方法 |
| JP2005245051A (ja) * | 2004-02-24 | 2005-09-08 | Matsushita Electric Ind Co Ltd | モータ制御装置の制御パラメータ算出方法およびモータ制御装置 |
| JP2005328607A (ja) * | 2004-05-13 | 2005-11-24 | Mitsubishi Electric Corp | モータ制御装置 |
-
2006
- 2006-01-05 JP JP2006000352A patent/JP2007185014A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08253950A (ja) * | 1995-03-15 | 1996-10-01 | Yanmar Diesel Engine Co Ltd | バックホーの制御方法 |
| JP2005245051A (ja) * | 2004-02-24 | 2005-09-08 | Matsushita Electric Ind Co Ltd | モータ制御装置の制御パラメータ算出方法およびモータ制御装置 |
| JP2005328607A (ja) * | 2004-05-13 | 2005-11-24 | Mitsubishi Electric Corp | モータ制御装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009268292A (ja) * | 2008-04-28 | 2009-11-12 | Panasonic Corp | モータ駆動装置 |
| JP2012249342A (ja) * | 2011-05-25 | 2012-12-13 | Hitachi Ltd | 電動機駆動システムおよび方法 |
| JP2017174180A (ja) * | 2016-03-24 | 2017-09-28 | ファナック株式会社 | サーボ制御装置、サーボ制御方法及びサーボ制御プログラム |
| US10564658B2 (en) | 2016-03-24 | 2020-02-18 | Fanuc Corporation | Servo control apparatus, servo control method and computer-readable recording medium |
| CN116673950A (zh) * | 2017-03-31 | 2023-09-01 | 精工爱普生株式会社 | 机器人控制装置、机器人以及机器人系统 |
| JP2018171665A (ja) * | 2017-03-31 | 2018-11-08 | セイコーエプソン株式会社 | 装置、ロボット、およびロボットシステム |
| CN107024617B (zh) * | 2017-04-21 | 2019-11-05 | 上海电气集团股份有限公司 | 一种电机转矩振荡频率辨识方法 |
| CN107024617A (zh) * | 2017-04-21 | 2017-08-08 | 上海电气集团股份有限公司 | 一种电机转矩振荡频率辨识方法 |
| CN109941855A (zh) * | 2017-12-21 | 2019-06-28 | 株式会社日立制作所 | 电梯装置的控制装置及控制方法 |
| KR20230154976A (ko) * | 2021-04-21 | 2023-11-09 | 미쓰비시덴키 가부시키가이샤 | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 |
| KR102813145B1 (ko) * | 2021-04-21 | 2025-05-26 | 미쓰비시덴키 가부시키가이샤 | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 |
| WO2024185790A1 (ja) * | 2023-03-07 | 2024-09-12 | オムロン株式会社 | サーボパラメータの調整方法、および調整装置 |
| EP4661283A1 (en) | 2023-03-07 | 2025-12-10 | OMRON Corporation | Servo parameter adjustment method and adjustment device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6664107B2 (ja) | モータ駆動装置のサーボ調整方法およびモータ駆動装置のサーボ調整を行うサーボ調整装置 | |
| JP5127824B2 (ja) | 軸の位置制御方法、位置調節器およびデータ媒体 | |
| JP4779969B2 (ja) | 電動機制御装置 | |
| US10618164B2 (en) | Robot system having learning control function and learning control method | |
| JP5816826B2 (ja) | モータ駆動装置 | |
| JP5669986B1 (ja) | 数値制御装置および数値制御方法 | |
| CN105191116B (zh) | 电动机驱动装置 | |
| JP2009122779A (ja) | 制御システムおよび制御支援装置 | |
| US11507885B2 (en) | Machine learning device, control device, and machine learning search range setting method | |
| JP7022261B1 (ja) | 周波数特性予測装置及び周波数特性予測方法 | |
| CN109562518B (zh) | 并联连杆机构的控制装置 | |
| CN107196581B (zh) | 用于微调伺服马达的控制装置、方法及计算机可读介质 | |
| JP2007185014A (ja) | モータ制御装置の制御パラメータ算出方法、算出プログラムおよびモータ制御装置 | |
| JP4837558B2 (ja) | モータ制御装置 | |
| JP2018120399A (ja) | 制御装置、制御プログラムおよび制御システム | |
| Tenne et al. | Optimal design of/spl alpha/-/spl beta/-/spl gamma/(/spl gamma/) filters | |
| US10684594B2 (en) | Machine learning device, servo motor controller, servo motor control system, and machine learning method | |
| WO2009110368A1 (ja) | 移動体のフィードフォワード制御方法 | |
| CN115502977B (zh) | 机械臂随动控制方法、装置、机械臂及存储介质 | |
| JP2011224694A (ja) | 多関節型ロボットの速度指令プロファイルの生成方法 | |
| CN109067284B (zh) | 一种基于滤波误差的电机控制方法及装置 | |
| CN104126156B (zh) | 命令和控制自动化单元的电动机及所连接的系统的方法 | |
| JP5460371B2 (ja) | 数値制御装置 | |
| CN113805596A (zh) | 一种控制器的位置调控方法、装置、设备及介质 | |
| JP4200357B2 (ja) | 電動機制御装置の運転立上げ方法および電動機制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081128 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110525 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110823 |