JP2007187568A - 自動分析装置 - Google Patents
自動分析装置 Download PDFInfo
- Publication number
- JP2007187568A JP2007187568A JP2006006290A JP2006006290A JP2007187568A JP 2007187568 A JP2007187568 A JP 2007187568A JP 2006006290 A JP2006006290 A JP 2006006290A JP 2006006290 A JP2006006290 A JP 2006006290A JP 2007187568 A JP2007187568 A JP 2007187568A
- Authority
- JP
- Japan
- Prior art keywords
- sound wave
- liquid
- reaction
- wall
- thickness
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000006243 chemical reaction Methods 0.000 claims abstract description 102
- 239000007788 liquid Substances 0.000 claims abstract description 66
- 239000003153 chemical reaction reagent Substances 0.000 claims abstract description 36
- 238000000034 method Methods 0.000 claims abstract description 8
- 239000012295 chemical reaction liquid Substances 0.000 claims abstract description 4
- 230000001678 irradiating effect Effects 0.000 claims abstract description 3
- 238000010897 surface acoustic wave method Methods 0.000 claims description 31
- 238000003756 stirring Methods 0.000 claims description 26
- 230000000717 retained effect Effects 0.000 claims description 4
- 238000004519 manufacturing process Methods 0.000 abstract description 15
- 238000004458 analytical method Methods 0.000 description 16
- 238000002834 transmittance Methods 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 9
- 238000003860 storage Methods 0.000 description 8
- 230000010355 oscillation Effects 0.000 description 7
- 238000004088 simulation Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000004140 cleaning Methods 0.000 description 5
- 239000011343 solid material Substances 0.000 description 5
- 238000013019 agitation Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 238000004506 ultrasonic cleaning Methods 0.000 description 3
- 238000010521 absorption reaction Methods 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 229910003327 LiNbO3 Inorganic materials 0.000 description 1
- 239000004793 Polystyrene Substances 0.000 description 1
- 229920001800 Shellac Polymers 0.000 description 1
- 238000002835 absorbance Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- -1 cyclic olefin Chemical class 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- JRZJOMJEPLMPRA-UHFFFAOYSA-N olefin Natural products CCCCCCCC=C JRZJOMJEPLMPRA-UHFFFAOYSA-N 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 229920002223 polystyrene Polymers 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004208 shellac Substances 0.000 description 1
- ZLGIYFNHBLSMPS-ATJNOEHPSA-N shellac Chemical compound OCCCCCC(O)C(O)CCCCCCCC(O)=O.C1C23[C@H](C(O)=O)CCC2[C@](C)(CO)[C@@H]1C(C(O)=O)=C[C@@H]3O ZLGIYFNHBLSMPS-ATJNOEHPSA-N 0.000 description 1
- 229940113147 shellac Drugs 0.000 description 1
- 235000013874 shellac Nutrition 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images



Landscapes
- Automatic Analysis And Handling Materials Therefor (AREA)
Abstract
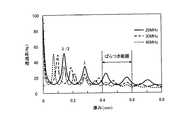
【解決手段】音波を利用して試料又は試薬を含む液体を非接触で攪拌又は混合して反応させ、反応液を分析する自動分析装置。音波が透過する壁7bを有し、液体を保持する複数の反応容器7と、各反応容器の壁外面に接触して配置され、壁7bを介して液体に音波を照射する表面弾性波素子21とを備え、複数の反応容器7は、音波の伝搬経路に沿った壁の肉厚tが壁を透過する音波の波長以上であり、使用する総ての反応容器における肉厚のばらつきが壁を透過する音波の波長の二分の一以上である。
【選択図】 図4
Description

Vc=(Er+j・Eim)1/2/ρ={Er(1+j・tanδ)}1/2/ρ
=V(1+j・tanδ)1/2………………(3)
Z0=ρ×Vc=Z(1+j・tanδ)1/2………………(4)
α=ω/2V×tanδ………………(5)
tanδ=αV/πF…………………(6)
F0=At×Zl+Bt………………(7)
F0/Fl=(At×Zl+Bt)/Zl=At+Bt/Zl………(8)
T=|F1/F0|=|1/(At+Bt/Zl)|……………(9)
上記の発明によれば、以下の付記に挙げる各項及びそれらの項を任意に組み合わせた発明が得られる。
音波を透過し、所定の肉厚を有する固体材料で構成されると共に、前記液体を保持する複数の容器と、
前記固体材料に接触して前記容器の外部に配置されると共に、前記固体材料を介して前記液体に所定周波数の音波を照射する音波発生手段と、
を有し、
以下の2式の関係を有することを特徴とする自動分析装置。
λ≦t
λ/2≦Δt
ただし、
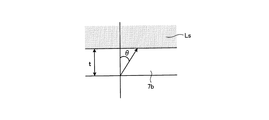
λ: 前記音波発生手段から照射される音波の前記固体材料中における波長
t: 前記音波発生手段の接触する点から前記液体までの前記音波の伝達経路
に沿った前記固体材料の肉厚
Δt: 自動分析装置において使用される複数の容器における肉厚tのばらつき
とする。
音波発生手段が発生した音波が透過する壁を有すると共に、前記音波の伝搬経路に沿った前記壁の肉厚が前記壁を透過する音波の波長以上であり、前記複数用いられる反応容器の前記肉厚のばらつきが前記壁を透過する音波の波長の二分の一以上であることを特徴とする反応容器。
2 作業テーブル
3 検体テーブル
4 検体容器
5 検体分注機構
6 反応テーブル
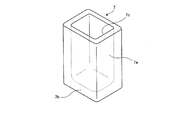
7 反応容器
8 光源
9 受光素子
11 排出装置
12 試薬分注機構
13 試薬テーブル
14 試薬容器
15 読取装置
16 制御部
17 分析部
18 入力部
19 表示部
7a 側壁
7b 底壁
7c 開口
20 攪拌装置
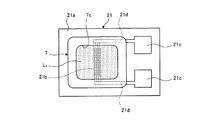
21 表面弾性波素子
22 駆動制御回路
23 攪拌制御部
24 発振部
25 増幅部
27 恒温板
28 音響整合層
Claims (6)
- 音波を利用して試料又は試薬を含む液体を非接触で攪拌又は混合して反応させ、反応液を分析する自動分析装置であって、
音波が透過する壁を有し、前記液体を保持する複数の反応容器と、
前記各反応容器の壁外面に接触して配置され、前記壁を介して前記液体に音波を照射する音波発生手段と、
を備え、
前記複数の反応容器は、前記音波の伝搬経路に沿った前記壁の肉厚が前記壁を透過する音波の波長以上であり、使用する総ての反応容器における前記肉厚のばらつきが前記壁を透過する音波の波長の二分の一以上であることを特徴とする自動分析装置。 - 前記肉厚のばらつきは、前記反応容器の肉厚に関する設計上の公差であることを特徴とする請求項1に記載の自動分析装置。
- 前記肉厚のばらつきは、前記複数の反応容器における肉厚の最大値と最小値との差であることを特徴とする請求項1に記載の自動分析装置。
- 前記音波発生手段は、表面弾性波素子であることを特徴とする請求項1に記載の自動分析装置。
- さらに、前記複数の音波発生手段の駆動を制御する共通の駆動制御手段を有することを特徴とする請求項1に記載の自動分析装置。
- さらに、前記反応容器及び前記反応容器に保持された液体をドライバス方式によって一定温度に保温する保温手段を有することを特徴とする請求項1に記載の自動分析装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006006290A JP2007187568A (ja) | 2006-01-13 | 2006-01-13 | 自動分析装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006006290A JP2007187568A (ja) | 2006-01-13 | 2006-01-13 | 自動分析装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007187568A true JP2007187568A (ja) | 2007-07-26 |
Family
ID=38342832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006006290A Pending JP2007187568A (ja) | 2006-01-13 | 2006-01-13 | 自動分析装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007187568A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101388771B1 (ko) * | 2012-03-19 | 2014-04-23 | 주식회사 흥성엔지니어링 | 배수공 타공장치 |
-
2006
- 2006-01-13 JP JP2006006290A patent/JP2007187568A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101388771B1 (ko) * | 2012-03-19 | 2014-04-23 | 주식회사 흥성엔지니어링 | 배수공 타공장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7808631B2 (en) | Stirrer and analyzer | |
| US20080170463A1 (en) | Agitation apparatus and analyzing apparatus provided with agitation apparatus | |
| CN102308218B (zh) | 搅拌装置和分析装置 | |
| WO2007108238A1 (ja) | 攪拌装置及び分析装置 | |
| WO2006134777A1 (ja) | 攪拌容器及び分析装置 | |
| JP4746924B2 (ja) | 攪拌装置、攪拌方法、反応容器及び攪拌装置を備えた分析装置 | |
| US20080240995A1 (en) | Reaction vessel and analyzer | |
| JP2007010345A (ja) | 攪拌装置、攪拌方法及び攪拌装置を備えた分析装置 | |
| JP6966337B2 (ja) | 化学分析装置、及び、当該化学分析装置に用いる音波攪拌機構 | |
| JP2007187568A (ja) | 自動分析装置 | |
| WO2009001950A1 (ja) | 音波発生体、攪拌装置及び自動分析装置 | |
| WO2007108179A1 (ja) | 攪拌装置及び分析装置 | |
| JP4861664B2 (ja) | 攪拌装置及び攪拌装置を備えた分析装置 | |
| JP2007303964A (ja) | 表面弾性波素子、攪拌装置及び分析装置 | |
| WO2010106998A1 (ja) | 攪拌装置、自動分析装置及び攪拌方法 | |
| JP2008268078A (ja) | 攪拌装置及び自動分析装置 | |
| JP2008268079A (ja) | 液面検知装置及び自動分析装置 | |
| JP2008170379A (ja) | 攪拌装置及び自動分析装置 | |
| WO2007097174A1 (ja) | 攪拌装置と分析装置 | |
| JP2007040847A (ja) | 攪拌装置及び攪拌装置を備えた分析装置 | |
| JP2008256565A (ja) | 撹拌装置および分析装置 | |
| JP2007198796A (ja) | 攪拌装置及び分析装置 | |
| JP2007232521A (ja) | 攪拌装置と分析装置 | |
| JP2007040846A (ja) | 攪拌装置及び攪拌装置を備えた分析装置 | |
| JP2007232523A (ja) | 攪拌装置と分析装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090428 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091104 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20100210 |
|
| A02 | Decision of refusal |
Effective date: 20100310 Free format text: JAPANESE INTERMEDIATE CODE: A02 |