JP2007188155A - 内燃機関又は電動モータの回転数積算計 - Google Patents
内燃機関又は電動モータの回転数積算計 Download PDFInfo
- Publication number
- JP2007188155A JP2007188155A JP2006003677A JP2006003677A JP2007188155A JP 2007188155 A JP2007188155 A JP 2007188155A JP 2006003677 A JP2006003677 A JP 2006003677A JP 2006003677 A JP2006003677 A JP 2006003677A JP 2007188155 A JP2007188155 A JP 2007188155A
- Authority
- JP
- Japan
- Prior art keywords
- integrated value
- value
- total
- unit
- maintenance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Time Recorders, Dirve Recorders, Access Control (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Instrument Panels (AREA)
Abstract
【課題】
本発明の目的は内燃機関又は電動モータの稼動状況をより正確に把握することにある。多くの自動車の場合、タコメータと呼ばれる内燃機関や電動モータの回転速度計が装備されている。しかし、この装置は単位時間における回転数を表示する計器である為、回転数の積算値を確認できないという問題があった。エンジン、各種ベルト及びオイル類の劣化は実際にエンジンがどれだけ駆動したかに比例すると考えられるため、エンジンの累積回転数を基準に適切なメンテナスを行うことを目的とする。
【解決手段】
本発明は回転数検出部A1で検出した内燃機関又は電動モータの回転数を累積計算部A2で累積して計算し、積算値表示部A3を通じてユーザが容易に認識できるため、各種メンテナンスをより適切に行うことを可能とする。
【選択図】 図1
本発明の目的は内燃機関又は電動モータの稼動状況をより正確に把握することにある。多くの自動車の場合、タコメータと呼ばれる内燃機関や電動モータの回転速度計が装備されている。しかし、この装置は単位時間における回転数を表示する計器である為、回転数の積算値を確認できないという問題があった。エンジン、各種ベルト及びオイル類の劣化は実際にエンジンがどれだけ駆動したかに比例すると考えられるため、エンジンの累積回転数を基準に適切なメンテナスを行うことを目的とする。
【解決手段】
本発明は回転数検出部A1で検出した内燃機関又は電動モータの回転数を累積計算部A2で累積して計算し、積算値表示部A3を通じてユーザが容易に認識できるため、各種メンテナンスをより適切に行うことを可能とする。
【選択図】 図1
Description
本発明は、内燃機関又は電動モータの回転数の積算値を表示する内燃機関又は電動モータの回転数積算計に関するものである。
自動車や自動二輪車の中で、最も重要な役割を担う動力装置は内燃機関(エンジン)や電動モータが挙げられる。そして、内燃機関又は電動モータの累積稼動状況の判断は主に走行距離が目安となっている。この走行距離の確認手段としてオドメータと呼ばれる総走行距離積算計及びトリップメータと呼ばれる積算された距離数を随時ゼロに戻す操作のできる区間距離計があり、回転式ドラムを用いた機械式による表示又は電子式(デジタル)で表示している装置である。そして、ユーザはエンジンオイルの交換や各種ベルトの交換を行う時期、また、中古車の購入を検討するときにも走行距離を目安にしている。
しかし、実際には走行距離と内燃機関又は電動モータの回転数の累積稼動状況は比例しないことが考えられる。これは、時速60Kmの速度を1速のギヤで走行した場合と5速のギヤで走行した場合ではギヤ比が異なる為、同じ走行距離でもギヤポジションによって内燃機関又は電動モータの回転数には差が生じる為である。
つまり、走行距離では本来の内燃機関又は電動モータの累積稼動状況を把握できないことが考えられる。
つまり、走行距離では本来の内燃機関又は電動モータの累積稼動状況を把握できないことが考えられる。
したがって、本発明の目的は内燃機関又は電動モータの累積稼動状況をより正確に把握することにある。多くの自動車の場合、運転席の計器板(インストルメントパネル)にはタコメータと呼ばれる内燃機関又は電動モータの回転速度計が装備されている。しかし、この装置は単位時間(1分間)における内燃機関又は電動モータの回転数を表示する計器である為、回転数の積算値つまり累積稼動状況を、確認できないという問題があった。
請求項1の発明は内燃機関又は電動モータの回転数Rのパルス信号を検出する回転数検出部と、該回転数検出部が検出したパルス信号を累積して計算する総積算値計算部と、該総積算値計算部の累積計算結果を積算値として表示する積算値表示部とを有することを特徴とする内燃機関又は電動モータの回転数積算計である。
請求項2の発明は請求項1に記載の内燃機関又は電動モータの回転数積算計において前記積算値表示部に表示する積算値の値をゼロに戻すことを不可能とすることを特徴として構成するものである。
請求項3の発明は請求項1に記載の内燃機関又は電動モータの回転数積算計において前記積算値表示部に表示する積算値の値を随時ゼロ表示にすることを可能とするゼロ戻し操作部を有することを特徴として構成するものである。
請求項4の発明は請求項1に記載の内燃機関又は電動モータの回転数積算計において前記積算値表示部を電子式表示とする場合、これを、入力された積算値をゼロに戻すことを不可能とする積算値、以後総積算値と呼ぶ、として記憶する総積算値記億部と該総積算値記憶部が記憶する総積算値TRを表示する積算値デジタル表示部とで構成し、更に該積算値表示部に、前記総積算値記億部の保持する総積算値TRをリセットポイント値RPとして記憶するリセットポイント記憶部と、前記総積算値記億部の保持する総積算値TRとリセットポイント記億部の保持するリセットポイント値RPとの差を求める積算値差算出部とを有することを特徴として構成するものである。尚、概積算値差算出部で求めた値を以後可変積算値と呼ぶ。
請求項5の発明は請求項1に記載の内燃機関又は電動モータの回転数積算計において前記積算値表示部を電子式表示とする場合、これを、入力された積算値をゼロに戻すことを不可能とする積算値として記憶する総積算値記億部と該総積算値記憶部が記憶する総積算値TRを表示する積算値デジタル表示部とで構成し、更に概総積算値記憶部に、複数のメンテナンスポイント値を記憶するメンテナンスポイント記憶部と、前記総積算値記億部の保持する総積算値TRが、メンテナンスポイント記億部の保持する複数のメンテナンスポイント値の各々の内、メンテナンス処理済みでないそれらの値以上か否かを判断する判断部と、該総積算値がいずれかのメンテナンスポイント値以上であると該判断部が判断した場合に、該当するメンテナンスポイント値に関して警告を発するように構成した警告部とを有することを特徴として構成するものである。
請求項1の発明によれば、内燃機関又は電動モータの回転数積算計により、暖気運転の時間や無用な空ふかし等ユーザによる使用方法の違いや交通渋滞による環境の違いが生じても内燃機関又は電動モータの累積稼動状況が把握しやすくなり、走行距離よりも正確に把握できる。
また、中古車市場で売買される車において走行距離だけではなく内燃機関又は電動モータの回転数積算計の積算値と併せることによって累積稼動状況が把握しやすくなり、評価の目安にすることもできる。
請求項2の発明によれば、これまでに使用してきた内燃機関又は電動モータの総累積稼動状況を確認することができる。
請求項3の発明によれば、ある区間又は期間走行した場合において内燃機関又は電動モータの累積稼動状況を容易に確認することができる。
請求項4の発明によれば、内燃機関又は電動モータの回転数積算計の積算値を利用者の目的に応じて使い分けることができる。例えばある区間、または、期間走行した場合においての稼動状況を確認することができる。また給油毎にゼロにリセットを行い燃料消費計算として利用する等目的に応じて使い分けることができる。
請求項5の発明によれば、各種メンテナンスの時期を各々のメンテナンス項目に応じて走行距離よりも適切に警告することができる。これによりオイルやベルト等の交換時期が早すぎる無駄なメンテナンスを防いだり、逆に交換時期が遅くなり、自動車の性能、耐久性を損なうおそれを避けることができる。
また、これらの発明については、自動車、自動二輪車、船舶、航空機、原動機付自転車、特殊車両及び発電機等の内燃機関や電動モータを動力としているものに使用することを可能とする。
また、これらの発明において予め当該機能を有していない場合でも同様の機能を有した付属品として、本発明を追加することを可能とする。
(第1の実施形態)
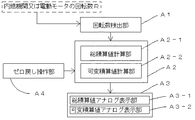
図1は、第1の実施形態の内燃機関又は電動モータの回転数積算計を示すブロック図であり、回転式ドラムによる表示とする。
回転式ドラムによる表示の詳細については、後述するものとする。
図1は、第1の実施形態の内燃機関又は電動モータの回転数積算計を示すブロック図であり、回転式ドラムによる表示とする。
回転式ドラムによる表示の詳細については、後述するものとする。
この回転数積算計は、回転数検出部A1、累積計算部A2(総積算値計算部A2−1、可変積算値計算部A2−2を含む)、積算値表示部A3(総積算値アナログ表示部A3−1、可変積算値アナログ表示部A3−2を含む)、ゼロ戻し操作部A4を有している。
回転数検出部A1は内燃機関又は電動モータの回転数Rを検出する。
この内燃機関の回転数Rの検出は、内燃機関の回転数に比例したイグナイタの信号をパルス信号として発生するものを利用する。ここで、内燃機関の1回転あたりのパルス数は搭載の気筒数により異なる。電動モータの回転数Rを検出する場合は、4極に外周着磁されたマグネットとMRE(Magnetic Resistance Element:磁気抵抗素子)を組み合わせ、さらにMRE出力処理回路を加え、最終的に1回転に4パルスの信号を発生するものを利用する。この技術は周知の技術を利用する為、詳細説明は省略する。
この内燃機関の回転数Rの検出は、内燃機関の回転数に比例したイグナイタの信号をパルス信号として発生するものを利用する。ここで、内燃機関の1回転あたりのパルス数は搭載の気筒数により異なる。電動モータの回転数Rを検出する場合は、4極に外周着磁されたマグネットとMRE(Magnetic Resistance Element:磁気抵抗素子)を組み合わせ、さらにMRE出力処理回路を加え、最終的に1回転に4パルスの信号を発生するものを利用する。この技術は周知の技術を利用する為、詳細説明は省略する。
総積算値計算部A2−1は回転式ドラムを用いた機械式の構成であり、パルスモータ部分とパルスモータの回転と連動するギヤ部分とギヤ部から回転の伝達を受けて回転表示する積算メータ部分で構成され、回転数検出部A1から出力される内燃機関又は電動モータのパルス信号を元にパルスモータを駆動し、ギヤを介して積算メータを回転させ累積計算する。
つまり、ここで求められる計算結果が内燃機関又は電動モータの回転数の総積算値となる。
つまり、ここで求められる計算結果が内燃機関又は電動モータの回転数の総積算値となる。
積算メータ部分は1つの数字につき36度ずつ回転し、桁上がりの際には直下の桁が9から0に戻る際に直上の桁を36度回転させ数字を一つ回転させる仕組みを利用する。
つまり、36度ずつ10回回転し、最後の0に戻った時には360度回転したことになり、直上の桁を動かし、桁が上がっていく仕組みである。この技術は周知の技術を利用する為、詳細説明は省略する。
つまり、36度ずつ10回回転し、最後の0に戻った時には360度回転したことになり、直上の桁を動かし、桁が上がっていく仕組みである。この技術は周知の技術を利用する為、詳細説明は省略する。
可変積算値計算部A2−2は回転式ドラムを用いた機械式の構成であり、パルスモータ部分とパルスモータの回転と連動するギヤ部分とギヤ部から回転の伝達を受けて回転表示する積算メータ部分で構成され、回転数検出部A1から出力される内燃機関又は電動モータのパルス信号を元にパルスモータを駆動し、ギヤを介して積算メータを回転させ累積計算する。
つまり、ここで求められる計算結果が内燃機関又は電動モータの回転数の可変積算値となる。
つまり、ここで求められる計算結果が内燃機関又は電動モータの回転数の可変積算値となる。
積算メータ部分は1つの数字につき36度ずつ回転し、桁上がりの際には直下の桁が9から0に戻る際に直上の桁を36度回転させ数字を一つ回転させる仕組みを利用する。
つまり、36度ずつ10回回転し、最後の0に戻った時には360度回転したことになり、直上の桁を動かし、桁が上がっていく仕組みである。この技術は周知の技術を利用する為、詳細説明は省略する。
つまり、36度ずつ10回回転し、最後の0に戻った時には360度回転したことになり、直上の桁を動かし、桁が上がっていく仕組みである。この技術は周知の技術を利用する為、詳細説明は省略する。
総積算値アナログ表示部A3−1は総積算値計算部A2−1で累積計算する結果、つまり総積算値を直接回転表示する。また、表示する総積算値はゼロに戻すことを不可能とする。この技術は既存の回転式ドラムによる表示である走行距離の総走行距離積算計と同様の技術を利用する為、詳細説明は省略する。
可変積算値アナログ表示部A3−2は可変積算値計算部A2−2で累積計算する結果、つまり可変積算値を直接回転表示する。また、表示する可変積算値はゼロにすることを可能とする。この技術は既存の回転式ドラムによる表示である走行距離の区間距離計と同様の技術を利用する為、詳細説明は省略する。
ゼロ戻し操作部A4は、ゼロ戻し機構で構成され、人為的な操作によってゼロ戻し機構を動かし可変積算値計算部A2−2の累積値をゼロにする。これにより可変積算値アナログ表示部A3−2に表示する可変積算値を随時ゼロ表示にすることを可能とする。但し、総積算値アナログ表示部A3−1に表示する総積算値はゼロ表示にすることを不可能とする。尚、このゼロ戻し機構は走行距離の区間距離計で用いている既存の技術を利用する為、詳細説明は省略する。
以上の第1の実施形態を図6の外観図を用いて別の観点から説明する。
総積算値アナログ表示部Y1は、総積算値の表示部であり、前述の回転式ドラムによる表示である。
また、回転表示を×1000回転の表示倍率としてもよいものとする。
また、回転表示を×1000回転の表示倍率としてもよいものとする。
可変積算値アナログ表示部Y2は、可変積算値の表示部であり、前述の回転式ドラムによる表示である。
また、回転表示を×1000回転の表示倍率としてもよいものとし、さらに小数点以下第一位を表示するようにしてもよい。
また、回転表示を×1000回転の表示倍率としてもよいものとし、さらに小数点以下第一位を表示するようにしてもよい。
ゼロ戻し操作部Y3は、先に記載した既存のゼロ戻し機構により可変積算値アナログ表示部Y2に表示する可変積算値をゼロにする為の操作ボタンである。
この実施形態ではゼロ戻し操作部Y3の押下操作により可変積算値アナログ表示部Y2に示す値はゼロへリセットされるものとする。
この実施形態ではゼロ戻し操作部Y3の押下操作により可変積算値アナログ表示部Y2に示す値はゼロへリセットされるものとする。
(第2の実施形態)
図2は、第2の実施形態の内燃機関又は電動モータの回転数積算計を示すブロック図であり、積算値表示部A3が電子式による表示、例えばLED表示器、液晶表示器、蛍光表示器等によるデジタル表示の場合を示す。
図2は、第2の実施形態の内燃機関又は電動モータの回転数積算計を示すブロック図であり、積算値表示部A3が電子式による表示、例えばLED表示器、液晶表示器、蛍光表示器等によるデジタル表示の場合を示す。
この回転数積算計は実施形態として、回転数検出部A1、累積計算部A2(総積算値計算部A2−3,積算値差算出部A2−4を含む)、積算値表示部A3(積算値デジタル表示部A3−3、積算値種類名表示部A3−4を含む)、ゼロ戻し操作部D4、記憶部D5(総積算値記憶部D5−1,リセットポイント記憶部D5−2を含む)、切り替え操作部D6を有している。
尚、回転数検出部A1は、第1の実施形態と同様の構成である為、第1の実施形態と同一の符号を付して詳細な説明を省略する。
総積算値計算部A2−3は回転数検出部A1から出力される内燃機関又は電動モータの回転数に比例するパルス信号を元にCPUにより累積計算し、総積算値を算出する。
尚、計算するタイミングはある単位時間、例えば1秒毎で行われるもとのする。
尚、計算するタイミングはある単位時間、例えば1秒毎で行われるもとのする。
ここで、前述のCPUとはCentral Processing Unit(中央処理装置)の略で各装置の制御や演算を行ったりする機能を備えており、累積計算部A2に含むものとする。
総積算値記憶部D5−1は、図10の左側の枠内に示す総積算値名TN及び右側の枠内に示す総積算値TRをレコード単位で記憶する領域が存在するものとする。
総積算値名TNは、総積算値の種類名を記憶する領域とし、総積算値TRは、総積算値計算部A2−3で算出する総積算値を記憶する領域とする。総積算値TRに記憶する総積算値はゼロに戻すことを不可能とする。
尚、総積算値を記憶するタイミングはある単位時間、例えば1秒毎で更新し記憶する。
尚、総積算値を記憶するタイミングはある単位時間、例えば1秒毎で更新し記憶する。
また、総積算値記憶部D5−1は、バッテリーがはずされても記憶内容が消去されないように、EEPROM(不揮発性メモリ)を用いている。この技術は既存のものを利用する為、詳細説明は省略する。
ここで、前述のEEPROM(不揮発性メモリ)は実施形態として記憶部D5に含むものとする。
積算値差算出部A2−4は、総積算値記憶部D5−1の総積算値TRと後述するリセットポイント記憶部D5−2のリセットポイント値RPの差を求める計算を行う。この計算で求められる結果が可変積算値となる。
この可変積算値の利用例としては、ある区間、又は、期間走行した時の稼動状況の確認用としたり、給油毎にゼロにリセットを行い燃料消費計算としたりする。つまり、利用者の目的に応じて使い分けることができる。
リセットポイント記憶部D5−2は、図9の左側の枠内に示す可変積算値名RN及び右側の枠内に示すリセットポイント値RPをレコード単位で記憶する領域が存在するものとする。
可変積算値名RNは、可変積算値の種類名を記憶する領域とし、図9の実施形態では、“Rev A”を可変積算値の種類名としている。
リセットポイント値RPは、総積算値記憶部D5−1の総積算値TRをリセットポイント値として記憶する領域とし、図9の実施形態では、“11111”をリセットポイント値RPとしている。尚、総積算値TRを記憶するタイミングは後述するゼロ戻し操作部D4のゼロ戻し操作時に行われるものとする。
つまり、図9の実施形態では、可変積算値名RNを“Rev A”とし、それに対応するリセットポイント値RPには“11111”としている。
ここで、可変積算値名RNに記憶する可変積算値の種類名は、予めメーカーで設定しているものとする。
尚、リセットポイント記憶部D5−2に可変積算値名RN及びリセットポイント値RPが複数のレコード領域として存在するようにしてもよいものとする。
複数記憶するレコード領域が2つの場合の実施形態として、可変積算値名RN[1]に“Rev A”とし、それに対応するリセットポイント値RPをリセットポイント値RP[1]とする。また、可変積算値名RN[2]に“Rev B”とし、それに対応するリセットポイント値RPをリセットポイント値RP[2]とする。
尚、可変積算値名RN[1]及び可変積算値名RN[2]は、後述の積算値種類名表示部A3−4へ選択的に切り替え表示することを可能とし、ゼロ戻し操作時には、総積算値記憶部D5−1の総積算値TRを、積算値種類名表示部A3−4へ選択表示された可変積算値名RN[n]に対応するリセットポイント値RP[n]へ、記憶するものとする。
これにより、可変積算値が複数存在するものとしている。この技術は走行距離の区間距離計である“Trip A”や“Trip B”と同様の技術を用いるものとする。
尚、可変積算値の利用例としては、ある区間、又は、期間走行した時の稼動状況の確認用としたり、給油毎にゼロにリセットを行い燃料消費計算としたりする。つまり、利用者の目的に応じて使い分けることができる。
尚、可変積算値の利用例としては、ある区間、又は、期間走行した時の稼動状況の確認用としたり、給油毎にゼロにリセットを行い燃料消費計算としたりする。つまり、利用者の目的に応じて使い分けることができる。
リセットポイント記憶部D5−2は、バッテリーがはずされても記憶内容が消去されないように、EEPROM(不揮発性メモリ)を用いている。この技術は既存のものを利用する為、詳細説明は省略する。
ゼロ戻し操作部D4は、人為的な操作によって後述の積算値デジタル表示部A3−3に表示する可変積算値を随時ゼロ表示にすることを可能とする操作部である。
また、この操作は総積算値には動作しないものとする。つまり、総積算値はゼロにすることを不可能とする。
また、この操作は総積算値には動作しないものとする。つまり、総積算値はゼロにすることを不可能とする。
可変積算値のゼロ表示は、ゼロ戻し操作部D4のゼロ戻し操作時に総積算値記憶部D5−1の総積算値TRをリセットポイント記憶部D5−2のリセットポイント値RPに記憶する。
その後、積算値差算出部A2−4で総積算値記憶部D5−1の総積算値TRとリセットポイント記憶部D5−2のリセットポイント値RPの差を求める計算を行う。
その後、積算値差算出部A2−4で総積算値記憶部D5−1の総積算値TRとリセットポイント記憶部D5−2のリセットポイント値RPの差を求める計算を行う。
つまり、ゼロ戻し操作時には総積算値記憶部D5−1の総積算値TRとリセットポイント値RPが同じ値になる為、表示する積算値すなわち可変積算値がゼロとなる。その後引き続き積算値差算出部A2−4で差を求める計算を単位時間毎に継続し総積算値記憶部D5−1の総積算値TRが累積されることで可変積算値も累積していく表示となる。
可変積算値を求める計算は後述の積算値デジタル表示部A3−3に可変積算値が表示されている時に行われ、計算するタイミングはある単位時間、例えば1秒毎で行われるものとする。
また、総積算値は後述の積算値デジタル表示部A3−3に総積算値が表示されているときに総積算値記憶部D5−1の総積算値TRを呼び出すものとし、呼び出すタイミングはある単位時間、例えば1秒毎で行われるものとする。
積算値デジタル表示部A3−3は、電子式による表示、例えば液晶表示器、LED表示器、蛍光表示器等によるデジタル表示で構成し、総積算値又は可変積算値を表示する。表示は、ある単位時間毎、例えば1秒毎のタイミングで更新表示する。
つまり、総積算値の表示は総積算値記憶部D5−1の総積算値TRを呼び出した値とし、可変積算値の表示は総積算値記憶部D5−1の総積算値TRとリセットポイント記憶部D5−2のリセットポイント値RPの差を積算値差算出部A2−4で求めた値とする。
積算値種類名表示部A3−4は、電子式による表示、例えば液晶表示器、LED表示器、蛍光表示器等によるデジタル表示で構成し、積算値デジタル表示部A3−3に表示されている積算値の種類名を常時表示する。
尚、積算値の種類名は、表示内容に応じて、総積算値記憶部D5−1の総積算値名TN又はリセットポイント記憶部D5−2の可変積算値名RNから呼び出されるものとする。
尚、積算値の種類名は、表示内容に応じて、総積算値記憶部D5−1の総積算値名TN又はリセットポイント記憶部D5−2の可変積算値名RNから呼び出されるものとする。
切り替え操作部D6は、積算値デジタル表示部A3−3に表示する積算値の切り替えを行う操作部である。この操作を行うことによって積算値デジタル表示部A3−3及び積算値種類名表示部A3−4の表示を選択的に切り替えることを可能としている。この技術は既存のものを利用する為、詳細説明は省略する。
以上の第2の実施形態について図7の外観図を用いて別の観点から説明する。
積算値デジタル表示部Z1−2は、同一の表示部で総積算値又は可変積算値の切り替え表示を可能とする表示部である。
これにより、表示するスペースの有効化を図り無駄を省くことができる。また、必要な積算値を選択的に表示することを可能とする。
これにより、表示するスペースの有効化を図り無駄を省くことができる。また、必要な積算値を選択的に表示することを可能とする。
積算値種類名表示部Z1−1は、積算値デジタル表示部Z1−2に表示する積算値に対応する種類名を、表示する機能を備える表示部である。
これにより、積算値デジタル表示部Z1−2に表示される積算値の種類名が把握しやすくなる。
これにより、積算値デジタル表示部Z1−2に表示される積算値の種類名が把握しやすくなる。
ゼロ戻し操作部Z2は、積算値デジタル表示部Z1−2が可変積算値を表示する場合に、ゼロ表示にすることを可能とする操作ボタンである。ボタンを押下操作することにより積算値デジタル表示部Z1−2に表示する可変積算値をゼロ表示にする。
尚、ゼロ戻し操作は総積算値の表示時には動作しないものとする。
この技術は周知の技術を利用する為、詳細説明は省略する。
尚、ゼロ戻し操作は総積算値の表示時には動作しないものとする。
この技術は周知の技術を利用する為、詳細説明は省略する。
切り替え操作部Z3は、積算値種類名表示部Z1−1に表示する積算値の種類名の切り替え表示を行うと共に積算値デジタル表示部Z1−2に表示する総積算値又は可変積算値の切り替え表示を行う為の操作ボタンである。つまり、積算値種類名表示部Z1−1に表示する積算値の種類名が切り替え表示された場合には、それに対応する積算値デジタル表示部Z1−2の積算値も同時に切り替え表示する。
尚、前述のゼロ戻し操作部Z2及び切り替え操作部Z3の双方の機能を有する1つの操作ボタンとすることも可能とする。
この場合の実施形態として、双方の機能を有する1つの操作ボタンを単位時間以上、例えば2秒以上の押下操作をすることによりゼロ戻し操作として機能し、単位時間未満、例えば2秒未満の押下操作をすることにより切り替え表示操作として機能する方法で操作を分けるものとする。
尚、ゼロ戻し操作は総積算値表示時には動作しないものとする。
この場合の実施形態として、双方の機能を有する1つの操作ボタンを単位時間以上、例えば2秒以上の押下操作をすることによりゼロ戻し操作として機能し、単位時間未満、例えば2秒未満の押下操作をすることにより切り替え表示操作として機能する方法で操作を分けるものとする。
尚、ゼロ戻し操作は総積算値表示時には動作しないものとする。
図5で、切り替え操作部Z3の操作による積算値種類名表示部Z1−1及び積算値デジタル表示部Z1−2の切り替え表示の実施形態を示す。
図5(1)の積算値種類名表示部Z1−1に示す“Total”は、総積算値の種類名とし、積算値デジタル表示部Z1−2に示す値は総積算値とする。また、積算値デジタル表示部Z1−2の表示を×1000回転の表示倍率としてもよいものとする。
図5(2)の積算値種類名表示部Z1−1に示す“Rev A”は、可変積算値の種類名とし、積算値デジタル表示部Z1−2に示す値は可変積算値とする。また、積算値デジタル表示部Z1−2の表示を×1000回転の表示倍率としてもよいものとし、さらに小数点以下第一位を表示するようにしてもよい。
ここで、前記“Rev A”のRevの表記はRevolutionの省略表記としている。
まず、図5(1)の積算値種類名表示部Z1−1に示す表示例を“Total”とし、積算値デジタル表示部Z1−2に示す値は“123456”とする。
切り替え操作部Z3の操作によって積算値種類名表示部Z1−1に示す表示は、“Total”から、図5(2)の積算値種類名表示部Z1−1に示す“Rev A”に表示が切り替えられ、積算値デジタル表示部Z1−2に示す値は“123456”から図5(2)の積算値デジタル表示部Z1−2に示す“1234”に切り替わるものとする。
さらに切り替え操作部Z3の操作を行った場合には、積算値種類名表示部Z1−1に示す表示が“Rev A”から図5(1)の積算値種類名表示部Z1−1に示す“Total”に表示が戻るものとし、積算値デジタル表示部Z1−2に示す値も“123456”に戻るものとする。引き続き切り替え操作部Z3の操作を行うことでこれらを繰り返し表示する。ここで、積算値デジタル表示部Z1−2に示す値は累積していないときに行ったものとする。つまり内燃機関又は電動モータが稼動していない状態で操作を行った場合とする。
また、この技術は走行距離の切り替え表示を行う既存の技術を利用する為、詳細説明は省略する。
また、この技術は走行距離の切り替え表示を行う既存の技術を利用する為、詳細説明は省略する。
ここで、上記の実施形態では、積算値種類名表示部Z1−1に示す表示項目を2項目としているが、かかる実施形態に限定されるものではなく、表示項目を2項目以上としてもよい。
また、上記の実施形態では、積算値種類名表示部Z1−1の表示を文字としているが、かかる実施形態に限定されるものではなく、把握することが可能であれば文字による表示に限定することはないとする。
(第3の実施形態)
図3は、第3の実施形態の内燃機関又は電動モータの回転数積算計のメンテナンス警告装置を示すブロック図である。
図3は、第3の実施形態の内燃機関又は電動モータの回転数積算計のメンテナンス警告装置を示すブロック図である。
この内燃機関又は電動モータの回転数積算計は、回転数検出部A1、累積計算部A2(総積算値計算部A2−3、変数値計算部A2−5を含む。)、記憶部D5(総積算値記憶部D5−1、メンテナンスポイント記憶部D5−3を含む。)、判断部D7(メンテナンス警告判断部D7−1、メンテナンス照合確認判断部D7−2を含む)、警告部D8を有している。
尚、回転数検出部A1、累積計算部A2のうち総積算値計算部A2−3、記憶部D5のうち総積算値記憶部D5−1については、第2の実施形態と同様の構成である為、第2の実施形態と同一の符号を付して詳細な説明を省略する。
変数値計算部A2−5は、変数値nを用いて、複数種類のメンテナンス項目を順次呼び出す為にカウントをする為の計算処理を行う。
つまり、変数値nに初期値1を代入し、その後、変数値nは1を加算していく変数値とし、後述のメンテナンステーブルに記憶されたメンテナンス項目名MI[n]と、それに対応するメンテナンスポイント値MP[n]を順次呼び出す。また、後述のメンテナンス照合確認判断部D7−2でメンテナンスポイント値MP[n]が最終項目を終えたと判断した後、変数値nを初期値1に戻し、最初のメンテナンス項目を呼び出すための設定をする。以後この動作を繰り返すものとする。
メンテナンスポイント記憶部D5−3は、メンテナンスの警告対象となる項目名として複数のメンテナンス項目名MI[n]、及びメンテナンスの警告対象となる値として複数のメンテナンスポイント値MP[n]を記憶する記憶部である。
このメンテナンスの警告対象となる値とは、総積算値である。
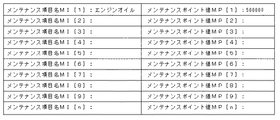
図8は、メンテナンス対象となるメンテナンステーブルを示しており、左側はメンテナンス項目名MI[n]とし、右側にはメンテナンスポイント値MP[n]としている。
メンテナンス項目名MI[n]とそれに対応するメンテナンスポイント値MP[n]は、1つのレコード単位とする。つまり、図8を用いて説明すると、左側のメンテナンス項目名MI[1]と右側のメンテナンスポイント値MP[1]で一対となり、これをレコード単位とする。図8の実施形態ではこのレコードが複数存在するものとする。
メンテナンス項目名MI[n]には、エンジンオイル、ファンベルト、タイミングベルト、スパークプラグ等をそれぞれメンテナンス項目名として登録することを可能とする。
メンテナンスポイント値MP[n]には、メンテナンス項目名毎にメンテナンスの警告対象となる値を登録することを可能とする。
図8の実施形態では、メンテナンス項目名MI[1]にはエンジンオイルとして登録し、メンテナンスポイント値MP[1]には500000として登録している。
メンテナンス警告判断部D7−1は、総積算値記憶部D5−1の総積算値TRが、前述のメンテナンスポイント記憶部D5−3のメンテナンスポイント値MP[n]で予め記憶する値以上か否かを判断する。
ここで、メンテナンス警告判断部D7−1には、予めメンテナンスの警告対象であるメンテナンス項目名MI[n]とメンテナンスポイント値MP[n]を呼び出し記憶しているものとする。
メンテナンス照合確認判断部D7−2は、メンテナンスポイント値MP[n]に対して照合が全て行なわれたか否かの判断をする。
警告部D8は、前述のメンテナンス警告判断部D7−1で、総積算値記憶部D5−1の総積算値TRがメンテナンスポイント値MP[n]で記憶した値以上であると判断した場合に、メンテナンスの警告を発する。
つまり図8の実施形態では、メンテナンス項目名MI[1]とメンテナンスポイント値MP[1]が1レコードとする為、メンテナンス項目名MI[1]で記憶するエンジンオイルに対して総積算値記憶部D5−1の総積算値TRの値が、メンテナンスポイント値MP[1]で記憶した値、500000以上であると判断した場合にエンジンオイルを対象とする警告を発する。この警告は利用者にエンジンオイルの交換を呼びかけているものとする。
この警告は、内燃機関又は電動モータの始動時から停止時まで常時発することも可能であるが、内燃機関又は電動モータの始動時からある一定時間警告を発するようにしてもよい。
また、警告だけではなく注意と警告の2段階に分けた警告レベルを設定し、ユーザにメンテナンスを促すようにしてもよい。
この注意と警告の2段階に分けてユーザにメンテナンスを促す例としては、メンテナンスポイント値MP[n]に記憶した値の10%を差し引いた値以上であると判断した場合にメンテナンスの注意を発し、メンテナンスポイント値MP[n]に記憶した値以上であると判断した場合にメンテナンスの警告を発する。
メンテナンス項目名MI[n]の登録及びメンテナンスポイント値MP[n]の登録については、ディーラー又は整備工場で整備担当者が端末で設定することを可能とする。尚、警告の対象となるメンテナンス項目に対し、メンテナンスを行った後は、メンテナンスポイント値MP[n]に次回実施する値を設定するものとする。
また、メンテナンスポイント値MP[n]が記憶する設定値については、予め実験等により求められているものとする。
警告部D8の実施形態を図7の外観図を用いて説明する。
警告部Z4は、ユーザにメンテナンスを促す為の警告を表示する。
この実施形態では、ユーザにエンジンオイルの交換を促す警告表示としている。尚、警告部Z4へ文字による警告表示としているが、かかる実施形態に限定されるものではなく、絵による警告表示、あるいは音声手段から音声等により行うようにしてもよい。また、色の異なる警告ランプとしてもよい。
第3の実施形態を図4のフローチャートを用いて説明する。
この実施形態では、ステップS1において、内燃機関又は電動モータの回転数Rのパルス信号を回転数検出部A1が検出する。
次にステップS2において、検出したパルス信号を元に総積算値計算部A2−3で累積計算し、計算結果として求められた総積算値を総積算値記憶部D5−1の総積算値TRへ記憶する。
次にステップS3において、メンテナンスポイント記憶部D5−3のメンテナンステーブルから、メンテナンス項目名MI[n]とメンテナンスポイント値MP[n]を呼び出す為の初期設定を行う。
ここでは、変数値計算部A2−5の変数値nに1を代入、つまりn=1とするものとし、第1番目のメンテナンス項目を呼び出す為の初期設定とする。尚、この呼び出しはメンテナンスポイント記憶部D5−3のメンテナンステーブルからレコード単位とするメンテナンス項目名MI[n]とメンテナンスポイント値MP[n]を呼び出すものとする。
ここでは、変数値計算部A2−5の変数値nに1を代入、つまりn=1とするものとし、第1番目のメンテナンス項目を呼び出す為の初期設定とする。尚、この呼び出しはメンテナンスポイント記憶部D5−3のメンテナンステーブルからレコード単位とするメンテナンス項目名MI[n]とメンテナンスポイント値MP[n]を呼び出すものとする。
次にステップS4において、メンテナンスポイント記憶部D5−3のメンテナンステーブルより、予め設定したメンテナンス項目名MI[n]及びメンテナンスポイント値MP[n]と総積算値記憶部D5−1の総積算値TRを、メンテナンス警告判断部D7−1で呼び出す。
次にステップS5において、ステップS4で呼び出したメンテナンスポイント記憶部D5−3のメンテナンスポイント値MP[n]と総積算値記憶部D5−1の総積算値TRの値を比較し、総積算値TRの値がメンテナンスポイント値MP[n]で記憶した値以上か否かをメンテナンス警告判断部D7−1で判断する。
次にステップS6において、ステップS5で総積算値記憶部D5−1の総積算値TRで記憶した値がメンテナンスポイント記憶部D5−3のメンテナンスポイント値MP[n]で記憶した値以上と判断した場合には、メンテナンスポイント記憶部D5−3のメンテナンス項目名MI[n]で記憶するメンテナンス項目名に対しての警告が利用者に発せられ、ステップS7の処理が行われる。
一方、ステップS5で判断した総積算値記憶部D5−1の総積算値TRで記憶した値が、メンテナンスポイント記憶部D5−3のメンテナンスポイント値MP[n]で記憶した値未満の場合には、ステップS7の処理が行われる。
次にステップS7において、メンテナンスポイント記憶部D5−3から、次のメンテナンス項目の対象となるメンテナンス項目名MI[n]及びメンテナンスポイント値MP[n]を呼び出すための設定を行う。
ここでは、変数値計算部A2−5の変数値nに1を加算、つまりn=n+1とするものとし、次のメンテナンス項目名MI[n]及びメンテナンスポイント値MP[n]を呼び出す為の設定とする。
ここでは、変数値計算部A2−5の変数値nに1を加算、つまりn=n+1とするものとし、次のメンテナンス項目名MI[n]及びメンテナンスポイント値MP[n]を呼び出す為の設定とする。
次にステップS8において、メンテナンスポイント記憶部D5−3の全てのメンテナンスポイント値MP[n]に対して照合が全て行われているかをメンテナンス照合確認判断部D7−2で判断し、照合が全て行われた場合、ステップS1へ戻りこれまでの処理が繰り返される。
一方、ステップS8において、メンテナンス照合確認判断部D7−2でメンテナンスポイント記憶部D5−3の全てのメンテナンスポイント値MP[n]に対して照合が全て行われていないと判断した場合には、上記ステップS4からステップS8までの処理が繰り返される。
以上、本発明の実施形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
A1 回転数検出部
A2 累積計算部
A2−1 総積算値計算部
A2−2 可変積算値計算部
A2−3 総積算値計算部
A2−4 積算値差算出部
A2−5 変数値計算部
A3 積算値表示部
A3−1 総積算値アナログ表示部
A3−2 可変積算値アナログ表示部
A3−3 積算値デジタル表示部
A3−4 積算値種類名表示部
A4 ゼロ戻し操作部
D4 ゼロ戻し操作部
D5 記憶部
D5−1 総積算値記憶部
D5−2 リセットポイント記憶部
D5−3 メンテナンスポイント記憶部
D6 切り替え操作部
D7 判断部
D7−1 メンテナンス警告判断部
D7−2 メンテナンス照合確認判断部
D8 警告部
Y1 総積算値アナログ表示部
Y2 可変積算値アナログ表示部
Y3 ゼロ戻し操作部
Z1−1 積算値種類名表示部
Z1−2 積算値デジタル表示部
Z2 ゼロ戻し操作部
Z3 切り替え操作部
Z4 警告部
S1 ステップS1
S2 ステップS2
S3 ステップS3
S4 ステップS4
S5 ステップS5
S6 ステップS6
S7 ステップS7
S8 ステップS8
MI[n] メンテナンス項目名
MP[n] メンテナンスポイント値
RN 可変積算値名
RP リセットポイント値
TN 総積算値名
TR 総積算値
n 変数値
R 回転数
A2 累積計算部
A2−1 総積算値計算部
A2−2 可変積算値計算部
A2−3 総積算値計算部
A2−4 積算値差算出部
A2−5 変数値計算部
A3 積算値表示部
A3−1 総積算値アナログ表示部
A3−2 可変積算値アナログ表示部
A3−3 積算値デジタル表示部
A3−4 積算値種類名表示部
A4 ゼロ戻し操作部
D4 ゼロ戻し操作部
D5 記憶部
D5−1 総積算値記憶部
D5−2 リセットポイント記憶部
D5−3 メンテナンスポイント記憶部
D6 切り替え操作部
D7 判断部
D7−1 メンテナンス警告判断部
D7−2 メンテナンス照合確認判断部
D8 警告部
Y1 総積算値アナログ表示部
Y2 可変積算値アナログ表示部
Y3 ゼロ戻し操作部
Z1−1 積算値種類名表示部
Z1−2 積算値デジタル表示部
Z2 ゼロ戻し操作部
Z3 切り替え操作部
Z4 警告部
S1 ステップS1
S2 ステップS2
S3 ステップS3
S4 ステップS4
S5 ステップS5
S6 ステップS6
S7 ステップS7
S8 ステップS8
MI[n] メンテナンス項目名
MP[n] メンテナンスポイント値
RN 可変積算値名
RP リセットポイント値
TN 総積算値名
TR 総積算値
n 変数値
R 回転数
Claims (5)
- 内燃機関又は電動モータの回転数のパルス信号を検出する回転数検出部と、該回転数検出部が検出したパルス信号を累積して計算する総積算値計算部と、該総積算値計算部の累積計算結果を積算値として表示する積算値表示部とを有することを特徴とする内燃機関又は電動モータの回転数積算計。
- 前記積算値表示部に表示する積算値の値をゼロに戻すことを不可能とすることを特徴とする請求項1に記載の回転数積算計。
- 前記積算値表示部に表示する積算値の値を随時ゼロ表示にすることを可能とするゼロ戻し操作部を有することを特徴とする請求項1に記載の回転数積算計。
- 前記積算値表示部を電子式表示とする場合、これを、入力された積算値をゼロに戻すことを不可能とする積算値として記憶する総積算値記億部と該総積算値記憶部が記憶する総積算値(TR)を表示する積算値デジタル表示部とで構成し、更に該積算値表示部に、前記総積算値記億部の保持する総積算値(TR)をリセットポイント値(RP)として記憶するリセットポイント記憶部と、前記総積算値記億部の保持する総積算値(TR)とリセットポイント記億部の保持するリセットポイント値(RP)との差を求める積算値差算出部とを付設した請求項1の回転数積算計。
- 前記積算値表示部を電子式表示とする場合、これを、入力された積算値をゼロに戻すことを不可能とする積算値として記憶する総積算値記億部と該総積算値記憶部が記憶する総積算値(TR)を表示する積算値デジタル表示部とで構成し、更に概総積算値記憶部に、複数のメンテナンスポイント値を記憶するメンテナンスポイント記憶部と、前記総積算値記億部の保持する総積算値(TR)が、メンテナンスポイント記億部の保持する複数のメンテナンスポイント値の各々の内、メンテナンス処理済みでないそれらの値以上か否かを判断する判断部と、該総積算値がいずれかのメンテナンスポイント値以上であると該判断部が判断した場合に、該当するメンテナンスポイント値に関して警告を発するように構成した警告部とを付設した請求項1の回転数積算計。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006003677A JP2007188155A (ja) | 2006-01-11 | 2006-01-11 | 内燃機関又は電動モータの回転数積算計 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006003677A JP2007188155A (ja) | 2006-01-11 | 2006-01-11 | 内燃機関又は電動モータの回転数積算計 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007188155A true JP2007188155A (ja) | 2007-07-26 |
Family
ID=38343302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006003677A Pending JP2007188155A (ja) | 2006-01-11 | 2006-01-11 | 内燃機関又は電動モータの回転数積算計 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007188155A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010282073A (ja) * | 2009-06-05 | 2010-12-16 | Hoya Corp | 電子内視鏡のレンズ位置制御装置 |
| JP2014159957A (ja) * | 2014-06-09 | 2014-09-04 | Max Co Ltd | 設備機器 |
| JP2019112192A (ja) * | 2017-12-22 | 2019-07-11 | 株式会社クボタ | アシスト器具 |
-
2006
- 2006-01-11 JP JP2006003677A patent/JP2007188155A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010282073A (ja) * | 2009-06-05 | 2010-12-16 | Hoya Corp | 電子内視鏡のレンズ位置制御装置 |
| JP2014159957A (ja) * | 2014-06-09 | 2014-09-04 | Max Co Ltd | 設備機器 |
| JP2019112192A (ja) * | 2017-12-22 | 2019-07-11 | 株式会社クボタ | アシスト器具 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102099840B (zh) | 驾驶诊断信息提供装置和系统 | |
| JP3528707B2 (ja) | 車両の燃費計測装置 | |
| JP5081042B2 (ja) | 車両用表示装置 | |
| JPS5820916A (ja) | エンジンオイル交換指示装置 | |
| JP2007107527A (ja) | 内燃機関の惰性回転時にスタータのスタータピニオンを内燃機関のリングギヤに噛み合わせるための方法および内燃機関のスタータ制御装置 | |
| US8749364B2 (en) | In-vehicle display apparatus, server, vehicle information display system, and communication method | |
| JP2007188155A (ja) | 内燃機関又は電動モータの回転数積算計 | |
| US7212107B2 (en) | Odometer system and method for a vehicle | |
| US6640762B2 (en) | System for indicating the level of fuel contained in the tank of a motor vehicle | |
| JP2004224269A (ja) | 車両用の表示装置および表示方法 | |
| JP2012250628A (ja) | 車両用表示装置 | |
| JP5636992B2 (ja) | 車両用表示装置 | |
| JP5872229B2 (ja) | 情報端末 | |
| JP2003072419A (ja) | 自動車用計器 | |
| CN100538021C (zh) | 用于调节凸轮轴相对于曲轴的转角位置的装置 | |
| US7557695B2 (en) | Meter driving device | |
| JP2010175508A (ja) | 走行距離演算方法 | |
| JP2012245896A (ja) | 車両用表示装置 | |
| JPH08170938A (ja) | ドライバーズエイド装置 | |
| KR100754891B1 (ko) | 연비 산출에 기초한 주행 상태 진단 시스템 및 그 방법 | |
| US20230315941A1 (en) | Simulation device | |
| JP3846343B2 (ja) | 車両用指針計器 | |
| JP3755441B2 (ja) | 自動車用計器 | |
| JP2012224094A (ja) | 車両用環境負荷表示方法 | |
| JP2008247391A (ja) | 車両用の表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090224 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090714 |