JP2007236602A - 磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置 - Google Patents
磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置 Download PDFInfo
- Publication number
- JP2007236602A JP2007236602A JP2006062659A JP2006062659A JP2007236602A JP 2007236602 A JP2007236602 A JP 2007236602A JP 2006062659 A JP2006062659 A JP 2006062659A JP 2006062659 A JP2006062659 A JP 2006062659A JP 2007236602 A JP2007236602 A JP 2007236602A
- Authority
- JP
- Japan
- Prior art keywords
- sensors
- transmitter
- motion capture
- fingers
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 title claims abstract description 36
- 238000000034 method Methods 0.000 claims description 5
- 238000004804 winding Methods 0.000 abstract 1
- 230000003287 optical effect Effects 0.000 description 5
- 230000036544 posture Effects 0.000 description 5
- 210000004247 hand Anatomy 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 210000002411 hand bone Anatomy 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images


Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
【解決手段】磁気式三次元位置姿勢システム(Liberty 16 system)は、1個のトランスミッタ(Transmitter)と16個のセンサ(sensors)で構成されており、トランスミッタに対するセンサの相対的な位置(X,Y,Z)および角度(Az,El,Ro)を計測することができる。それぞれのセンサは指に装着し易いようにモールドしており、1本の指に3個のセンサを装着できる。片手あたり手掌部の1個を加え計16個のセンサで手指のモーションキャプチャ(MoCap)を構成しており、あらゆる手の動きを計測することができる。また、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造である。
【選択図】図1
Description
また、ピアノなどのように手指によって演奏される楽器については、その演奏教習時に実際の手指の運指状態を目視で確認させることは重要な教習方法であり、楽器演奏時の運指を表示してその演奏教習を支援する運指データ作成装置及び運指表示装置が知られている(特許文献2を参照)。
現在、手指のモーションキャプチャ(MoCap)としては、グローブに埋め込まれた光ファイバーが曲がる時に光伝送率が減衰することを機序として手指の動きを測定する製品が主流であるが、手の動きの85%程度しか測定できないし、手の大きさに合わせて買い揃えなければならないなど、精度と汎用性の点で問題が残っていた。
さらに、大きさの異なる手指でもトランスミッタおよび16個のセンサを装着するため、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造である。
本発明のキャリブレーション手法は、16個のセンサ装着時の位置及び角度のズレを補正するため、トランスミッタの位置と姿勢を固定し、それよりy0離れた位置に平行な直線Lを描き、指を直線Lの左右に揃えることで装着者の手指の形状を測定するものである。
本発明の磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置は、小型軽量のトランスミッタと16個のセンサに加え、センサケーブルの細線化により指先などの小さな部位への装着を可能にした。
さらに、手指に16個のセンサを一定の姿勢で安定して装着するために解剖学的知見を踏まえた装着ユニットの技術開発により,汎用性の高い手指のモーションキャプチャを実現した。
また、左右両方の手を同時に測定できるキャプチャ用ソフトウェアの開発,また,リアルタイムで3D-CGを描画するソフトウェアの開発により手指用モーションキャプチャシステムを実現している。
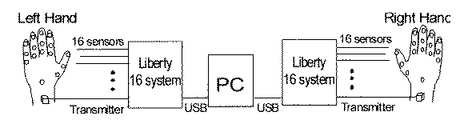
図1に示すように、磁気式三次元位置姿勢システム(Liberty 16 system)は、1個のトランスミッタ(Transmitter)と16個のセンサ(sensors)で構成されており、トランスミッタに対するセンサの相対的な位置(X,Y,Z)および角度(Az,El,Ro)を計測することができる。
それぞれのセンサは指に装着し易いようにモールドしており、1本の指に3個のセンサを装着できる。
片手あたり手掌部の1個を加え計16個のセンサで手指のモーションキャプチャ(MoCap)を構成しており、あらゆる手の動きを計測することができる。
また、手の大きさに関わらず装着できることを重視し、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造である。
指先に装着するセンサと爪との間には液状プラスチックを介することでズレを防ぎ、伸縮性がありべたつかない接着剤(商品名:Kinesiotex)で固体する。
磁気式三次元位置姿勢システムはUSBケーブル経由でコンピュータと接続し、16chを240Hzのサンプリングレートで計測する。
さらに、16個のセンサを多チャンネル化することで,両手の手指を同時に計測することが出来る。
また、トランスミッタと16個のセンサの最適な配置を検討し、16個のセンサおよびケーブルの小型軽量化により,従来は不可能であった指先にも装着できるように改良した。
指1本あたり3カ所、片手あたり計15カ所と手掌部1カ所の16カ所の位置(x,y,z)および姿勢(Az,El,Ro)の同時計測を可能にした。
また、16個のセンサを手指に装着するための装着ユニットを開発し,大きさの異なる手でも同一の装着ユニットを着用できるようにした.
手指の動きを再現するためには装着している手指の手骨の大きさ・形状を正確に計測した後,16個のセンサの位置・姿勢に関するキャプチャ・データから変換写像を用いて手骨の位置・姿勢を再現しなければならない。
手首にトランスミッタ、手指にセンサを装着する際、センサの位置は指の中心からずれており、センサと指骨の間の角度に差が生じてしまうため、実物の手指の姿勢・動きの情報と異なったものが計測データとして得られる。
磁気式三次元位置姿勢システムを用いた手指のモーションキャプチャ(MoCap)で記録したデータを3D-CGで再現するとき、指の個々の要素を実際のヒトのそれと一致させる作業、つまりキャリブレーションが必要となる。
図1にある各センサの中心に原点を仮定すると、トランスミッタから見た時それらの位置座標(X,Y,Z)および姿勢を示すオイラー角(Azimuth,Elevation,Roll;Az,El,Ro)の情報が得られ、パソコンにリアルタイムで記録される。
センサにより計測可能なデータは、図2(a)に示しており、X、Y、Zはトランスミッタの座標系を表し、x’、y’、z’はセンサの座標系を示している。
前述のセンサ装着時の位置及び角度のズレをキャリブレーションするため、図2(b)にあるように、トランスミッタの位置と姿勢を固定し、それよりy0離れた位置に平行な直線Lを描き、指を直線Lの左右に揃えることでキャリブレーションを試みた。
ここでは、右手の人差し指の1センサを例に説明する。
指が直線Lの右にあるときのセンサのY座標をYR、左にある場合をYLとするとY座標は指の幅の中心をとり、Y+y0−(YR+YL)/2と変換できる。
ここで、(YR−YL)は指の幅を示す。
同様に、全てのセンサのY座標を修正する。
図2(b)の方法でZ座標およびAz、El、Roのキャリブレーションも可能である。
図3には、手を開いた状態から握るまでの右手センサ位置の変位を3次元空間に描画したCGを示す。
Claims (3)
- ケーブルを細線化した小型軽量のトランスミッタと16個のセンサを用いた磁気式3次元位置姿勢センサを用いて手指の動きを計測することを特徴とするモーションキャプチャ装置。
- 大きさの異なる手指でもトランスミッタおよび16個のセンサを装着するため、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造であることを特徴とする請求項1記載のモーションキャプチャ装置。
- 16個のセンサ装着時の位置及び角度のズレを補正するため、トランスミッタの位置と姿勢を固定し、それよりy0離れた位置に平行な直線Lを描き、指を直線Lの左右に揃えることで装着者の手指の形状を測定することを特徴とするキャリブレーション手法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006062659A JP4465476B2 (ja) | 2006-03-08 | 2006-03-08 | 磁気式位置姿勢センサを用いた手指用モーションキャプチャ計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006062659A JP4465476B2 (ja) | 2006-03-08 | 2006-03-08 | 磁気式位置姿勢センサを用いた手指用モーションキャプチャ計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007236602A true JP2007236602A (ja) | 2007-09-20 |
| JP4465476B2 JP4465476B2 (ja) | 2010-05-19 |
Family
ID=38582740
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006062659A Expired - Lifetime JP4465476B2 (ja) | 2006-03-08 | 2006-03-08 | 磁気式位置姿勢センサを用いた手指用モーションキャプチャ計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4465476B2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2037710A2 (en) | 2007-09-12 | 2009-03-18 | Kabushiki Kaisha Toshiba | Mobile communication system, base station control apparatus, mobile terminal and method for controlling handover |
| JP2010117886A (ja) * | 2008-11-13 | 2010-05-27 | Kanto Auto Works Ltd | 仮想試作システム及び仮想試作における動作情報の処理方法並びに該処理方法を記録した記録媒体 |
| JP2010131085A (ja) * | 2008-12-02 | 2010-06-17 | Waseda Univ | 歩行計測装置 |
| JP2010271927A (ja) * | 2009-05-21 | 2010-12-02 | Kanto Auto Works Ltd | 作業判定システム及び作業判定方法並びに該作業判定方法を記録した記録媒体 |
| EP2354897A1 (en) * | 2010-02-02 | 2011-08-10 | Deutsche Telekom AG | Around device interaction for controlling an electronic device, for controlling a computer game and for user verification |
| JP2011200997A (ja) * | 2010-03-26 | 2011-10-13 | Kanto Auto Works Ltd | ロボットのティーチング装置及びティーチング方法 |
| WO2016026440A1 (zh) * | 2014-08-20 | 2016-02-25 | 博世(中国)投资有限公司 | 用于采集手语识别用数据的手套 |
| WO2017029793A1 (ja) * | 2015-08-20 | 2017-02-23 | 株式会社Jvcケンウッド | 頭外定位処理装置、及びフィルタ選択方法 |
| WO2018110925A1 (ko) * | 2016-12-17 | 2018-06-21 | 이양수 | 수면 중 뇌졸중 판단 장치 |
| JP2019101945A (ja) * | 2017-12-06 | 2019-06-24 | 国立大学法人秋田大学 | 入力システム |
| WO2020252856A1 (zh) * | 2019-06-21 | 2020-12-24 | 深圳岱仕科技有限公司 | 连接机构及手部外骨骼设备 |
| EP3910407A1 (en) | 2020-05-08 | 2021-11-17 | Topcon Corporation | Eyewear display system and eyewear display method |
| KR20230078500A (ko) * | 2021-11-26 | 2023-06-02 | 한국과학기술원 | 웨어러블 동작인식 시스템 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101563298B1 (ko) | 2014-07-23 | 2015-10-26 | 동서대학교산학협력단 | 수부 모션인식 기반의 수부 재활치료 시스템 |
-
2006
- 2006-03-08 JP JP2006062659A patent/JP4465476B2/ja not_active Expired - Lifetime
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2037710A2 (en) | 2007-09-12 | 2009-03-18 | Kabushiki Kaisha Toshiba | Mobile communication system, base station control apparatus, mobile terminal and method for controlling handover |
| JP2010117886A (ja) * | 2008-11-13 | 2010-05-27 | Kanto Auto Works Ltd | 仮想試作システム及び仮想試作における動作情報の処理方法並びに該処理方法を記録した記録媒体 |
| JP2010131085A (ja) * | 2008-12-02 | 2010-06-17 | Waseda Univ | 歩行計測装置 |
| JP2010271927A (ja) * | 2009-05-21 | 2010-12-02 | Kanto Auto Works Ltd | 作業判定システム及び作業判定方法並びに該作業判定方法を記録した記録媒体 |
| US8376854B2 (en) | 2010-02-02 | 2013-02-19 | Deutsche Telekom Ag | Around device interaction for controlling an electronic device, for controlling a computer game and for user verification |
| EP2354897A1 (en) * | 2010-02-02 | 2011-08-10 | Deutsche Telekom AG | Around device interaction for controlling an electronic device, for controlling a computer game and for user verification |
| JP2011200997A (ja) * | 2010-03-26 | 2011-10-13 | Kanto Auto Works Ltd | ロボットのティーチング装置及びティーチング方法 |
| WO2016026440A1 (zh) * | 2014-08-20 | 2016-02-25 | 博世(中国)投资有限公司 | 用于采集手语识别用数据的手套 |
| WO2017029793A1 (ja) * | 2015-08-20 | 2017-02-23 | 株式会社Jvcケンウッド | 頭外定位処理装置、及びフィルタ選択方法 |
| WO2018110925A1 (ko) * | 2016-12-17 | 2018-06-21 | 이양수 | 수면 중 뇌졸중 판단 장치 |
| JP2019101945A (ja) * | 2017-12-06 | 2019-06-24 | 国立大学法人秋田大学 | 入力システム |
| WO2020252856A1 (zh) * | 2019-06-21 | 2020-12-24 | 深圳岱仕科技有限公司 | 连接机构及手部外骨骼设备 |
| EP3910407A1 (en) | 2020-05-08 | 2021-11-17 | Topcon Corporation | Eyewear display system and eyewear display method |
| KR20230078500A (ko) * | 2021-11-26 | 2023-06-02 | 한국과학기술원 | 웨어러블 동작인식 시스템 |
| KR102883918B1 (ko) * | 2021-11-26 | 2025-11-11 | 한국과학기술원 | 웨어러블 동작인식 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4465476B2 (ja) | 2010-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3707584B1 (en) | Method for tracking hand pose and electronic device thereof | |
| JP4465476B2 (ja) | 磁気式位置姿勢センサを用いた手指用モーションキャプチャ計測方法 | |
| CN100489833C (zh) | 位置姿势测量方法、位置姿势测量装置 | |
| CN106679651B (zh) | 声源定位方法、装置和电子设备 | |
| US20180143696A1 (en) | Body posture detection system, suit and method | |
| Lin et al. | Novel assembled sensorized glove platform for comprehensive hand function assessment by using inertial sensors and force sensing resistors | |
| JP6852673B2 (ja) | センサ装置、センサシステム及び情報処理装置 | |
| US10433725B2 (en) | System and method for capturing spatially and temporally coherent eye gaze and hand data during performance of a manual task | |
| US20130158946A1 (en) | Modelling of hand and arm position and orientation | |
| CN115023732B (zh) | 信息处理装置、信息处理方法和信息处理程序 | |
| Maestre et al. | Acquisition of violin instrumental gestures using a commercial EMF tracking device | |
| US20120251991A1 (en) | Peripheral Probe with Six Degrees of Freedom Plus Compressive Force Feedback | |
| TW201308218A (zh) | 移動軌跡校正方法及移動軌跡產生方法 | |
| US10884505B1 (en) | Systems and methods for transitioning to higher order degree-of-freedom tracking | |
| Moreira et al. | Real-time hand tracking for rehabilitation and character animation | |
| KR20210093866A (ko) | 정보 처리 장치, 정보 처리 방법 및 프로그램 | |
| CN114840079B (zh) | 一种基于手势识别的高铁模拟驾驶动作虚实交互方法 | |
| EP4119308A1 (en) | Information processing device, information processing method, and information processing program | |
| Shenoy et al. | Design and validation of an IMU based full hand kinematic measurement system | |
| CN112486331A (zh) | 基于imu的三维空间手写输入方法和装置 | |
| CN118787449A (zh) | 基于多模态数据融合的手术器械导航装置及导航方法 | |
| US20180216959A1 (en) | A Combined Motion Capture System | |
| JP5540583B2 (ja) | 位置計測システム、位置計測用演算装置およびプログラム | |
| JP2002336282A (ja) | 剛体運動測定方法、剛体運動測定装置、剛体運動測定プログラム、顎運動測定方法、顎運動測定装置および顎運動測定プログラム | |
| JP2014117409A (ja) | 身体関節位置の計測方法および装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090127 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20090127 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20090226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090309 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090423 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090806 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091001 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100121 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |