JP2007238251A - 記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置 - Google Patents
記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置 Download PDFInfo
- Publication number
- JP2007238251A JP2007238251A JP2006061886A JP2006061886A JP2007238251A JP 2007238251 A JP2007238251 A JP 2007238251A JP 2006061886 A JP2006061886 A JP 2006061886A JP 2006061886 A JP2006061886 A JP 2006061886A JP 2007238251 A JP2007238251 A JP 2007238251A
- Authority
- JP
- Japan
- Prior art keywords
- recording medium
- roller
- moving
- moving means
- recording
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000011144 upstream manufacturing Methods 0.000 claims abstract description 8
- 230000004044 response Effects 0.000 claims abstract description 3
- 238000001514 detection method Methods 0.000 claims description 83
- 238000003825 pressing Methods 0.000 claims description 59
- 230000008859 change Effects 0.000 claims description 3
- 230000032258 transport Effects 0.000 description 54
- 230000000694 effects Effects 0.000 description 10
- 238000000034 method Methods 0.000 description 6
- 238000003708 edge detection Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000003746 surface roughness Effects 0.000 description 3
- 239000000919 ceramic Substances 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
Images







Landscapes
- Controlling Sheets Or Webs (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
Abstract
【課題】端部検出センサがなくても長さ検出を可能にして装置の低廉化を図る。
【解決手段】記録媒体を一対のローラ間で移動させる第1の移動手段と、第1の上流側の第2の移動手段と、第1の下流側の第3の移動手段と、第1の移動手段のいずれかのローラの回転量に応じてパルス信号を発信する回転量検出手段と、第1、第2及び第3の移動手段の駆動を制御し、先端検出の時点から後端検出の時点までの回転量検出手段のパルス信号数に基づいて記録媒体の長さを検出する制御手段とを有し、制御手段は、第2の移動手段によって記録媒体を第1の移動手段に移動させた後、第1の移動手段のローラが回転して回転量検出手段からパルス信号の受信を開始した時点で先端と判断し、第1の移動手段を経由した記録媒体の移動を第3の移動手段で開始させた後、第1の移動手段のローラが回転停止して回転量検出手段からパルス信号を受信しなくなった時点で後端と判断する。
【選択図】図1
【解決手段】記録媒体を一対のローラ間で移動させる第1の移動手段と、第1の上流側の第2の移動手段と、第1の下流側の第3の移動手段と、第1の移動手段のいずれかのローラの回転量に応じてパルス信号を発信する回転量検出手段と、第1、第2及び第3の移動手段の駆動を制御し、先端検出の時点から後端検出の時点までの回転量検出手段のパルス信号数に基づいて記録媒体の長さを検出する制御手段とを有し、制御手段は、第2の移動手段によって記録媒体を第1の移動手段に移動させた後、第1の移動手段のローラが回転して回転量検出手段からパルス信号の受信を開始した時点で先端と判断し、第1の移動手段を経由した記録媒体の移動を第3の移動手段で開始させた後、第1の移動手段のローラが回転停止して回転量検出手段からパルス信号を受信しなくなった時点で後端と判断する。
【選択図】図1
Description
本発明は記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置に関し、詳しくは、記録媒体の端部を検出するための検出手段を削減しても記録媒体の長さ検出を可能にした記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置に関する。
情報を記録する記録装置では、記録媒体にユーザが望み得る全ての情報を記録するために、搬送される記録媒体の長さを検出する長さ検出装置が設けられている。
このような記録媒体の長さ検出装置を有する従来の記録装置の一例を図10に示す。
この記録装置は、記録媒体P上に情報を記録するための記録手段100に対して、上流側(図示右側)に搬送ローラ101、下流側(図示左側)に排出ローラ102が設けられている。搬送ローラ101の更に上流側には給送ローラ103が設けられている。給送ローラ103は多数の記録媒体Pが積層載置されている給送台104から、記録媒体Pを1枚ずつ給送するようになっている。
搬送ローラ101は図示しない駆動手段により自ら回転する駆動ローラであり、その回転に従動して回転する搬送押さえローラ105が搬送ローラ101に接するように設けられている。記録媒体Pはこれら搬送ローラ101と搬送押さえローラ105との間に挟み込まれ、搬送ローラ101の回転駆動によって搬送されるようになっている。
搬送ローラ101の回転軸には、該搬送ローラ101の回転量を検出するロータリーエンコーダ106が設けられていると共に、このロータリーエンコーダ106からパルスを検出するエンコーダセンサ107が設けられている。
また、記録手段100と対向する位置に記録媒体Pを支持する載置台108が設けられている。載置台108には穴が空いており、空いた穴には記録媒体Pの端部を検出するための反射式センサからなる端部検出センサ109が設けられている。
この記録装置では、給送ローラ103と搬送ローラ101が回転することにより、記録媒体Pは図の右から左の方向へ搬送される。そして、記録媒体Pの先端が端部検出センサ109の位置まで来ると、その先端が検出される。その後、エンコーダセンサ107のパルス検出によって所定量だけ搬送ローラ101を回転させて、記録媒体Pが記録手段100のノズルに対向する位置まで来ると、記録手段100が作動されて印刷が行われる。
更に、搬送ローラ101と給送ローラ103との間に記録媒体Pの種類を判別する種類判別センサ110が設けられている。記録媒体Pが搬送ローラ101を通過し、更に端部検出センサ109が記録媒体Pの先端を検出したときに、種類判別センサ110を動作させて、記録媒体Pの種類を判別する。
記録媒体Pは、給送ローラ103、搬送ローラ101、排出ローラ102に橋渡しされながら搬送される。そして、端部検出センサ109によって信号が検出されなくなった時、記録媒体Pの後端であると判断される。そして、記録媒体Pの長さは、端部検出センサ109が先端を検出した時点から後端を検出した時点までの間に受信されたエンコーダセンサ107のパルス数を計数することによって検出される。
なお、図中、111は排出ローラ102との間で記録媒体Pを挟む排出押さえローラ、112は排出された記録媒体Pを載置する排出台である。
特許第3663922号公報
特開2005−289642号公報
このような従来の記録装置では、記録媒体の長さを検出するために、端部検出センサの検出信号とエンコーダセンサからの検出信号とを利用している。センサによる検出には遅延が発生するので、このように複数のセンサを用いて検出を行うと、検出値と実際の値との誤差が大きくなり、記録媒体の長さを正確に検出できない問題がある。
しかも、複数のセンサを用いることはコストがかかるばかりでなく、それぞれのセンサを制御するときに負荷がかかることにより、制御速度の低下や制御の不安定化を招く問題もある。
更に、端部検出センサには、光を記録媒体に照射させて反射又は透過した光の量によって記録媒体の有無を検出する光学式センサが採用されている。光学式センサは、照射させる光の量が小さいと、紙粉や埃等によって記録媒体に照射する光が遮られた場合に記録媒体を正しく検出できなくなる問題がある。また、照射させる光の量が大きいと、光を照射させる発光体の寿命が短くなる。このため従来では、生産時や端部検出センサ交換時等に、照射させる光の量を高精度に調整しなければならないため、これもコスト上問題となっている。
そこで、本発明は、記録媒体の端部検出のための専用のセンサを設けなくても、記録媒体の長さ検出を可能にして装置の低廉化を図り、制御対象の削減により制御を高速、安定化させ、検出値と実際の値との誤差を低減することができる記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置を提供することを課題とする。
更に、本発明の他の課題は、以下の記載により明らかになる。
上記課題は、以下の各発明によって解決される。
請求項1記載の発明は、記録媒体を一対のローラ間に挟み込んで移動させる第1の移動手段と、前記第1の移動手段の上流側に位置し、前記記録媒体を前記第1の移動手段まで移動させる第2の移動手段と、前記第1の移動手段の下流側に位置し、前記第1の移動手段を経由した前記記録媒体を移動させる第3の移動手段と、前記第1の移動手段のいずれかのローラの回転量に応じてパルス信号を発信する回転量検出手段と、前記第1の移動手段、前記第2の移動手段及び前記第3の移動手段の駆動をそれぞれ制御すると共に、前記記録媒体の先端を検出した時点から後端を検出した時点までの前記回転量検出手段からのパルス信号の数に基づいて、前記記録媒体の長さを検出するようにした制御手段とを有し、前記制御手段は、前記第2の移動手段によって前記記録媒体を前記第1の移動手段に向けて移動させた後、前記第1の移動手段のローラが前記記録媒体の移動に応じて回転して前記回転量検出手段からのパルス信号の受信を開始した時点で、前記記録媒体の先端であると判断し、前記第1の移動手段を経由した前記記録媒体の移動を前記第3の移動手段によって開始させた後、前記第1の移動手段のローラが前記記録媒体の通過により回転停止して前記回転量検出手段からのパルス信号を受信しなくなった時点で、前記記録媒体の後端であると判断することを特徴とする記録媒体の長さ検出装置である。
請求項2記載の発明は、前記第1の移動手段は、駆動手段によって駆動される駆動ローラと該駆動ローラの回転に従動して回転する従動ローラからなり、回転停止している前記駆動ローラと前記従動ローラとの間に前記記録媒体の端部が進入した時に、前記駆動ローラが前記記録媒体の進入に応じて回転可能な構成を有していることを特徴とする請求項1記載の記録媒体の長さ検出装置である。
請求項3記載の発明は、前記第1の移動手段は、前記駆動手段の前記駆動ローラへの駆動力の伝達を接続する状態と、該駆動力の伝達を切断して前記駆動ローラを回転自由な状態とに切り替える切替手段を有し、前記制御手段は、前記回転量検出手段からのパルス信号の受信を開始するまでは、前記切替手段によって前記駆動ローラを回転自由な状態に切り替えることにより、前記記録媒体の進入に応じて前記駆動ローラが回転可能な構成であることを特徴とする請求項2記載の記録媒体の長さ検出装置である。
請求項4記載の発明は、前記第1の移動手段は、前記従動ローラの前記駆動ローラに対する押圧力を強い状態と弱い状態とに変更する押圧力変更手段を有し、前記制御手段は、前記回転量検出手段からのパルス信号の受信を開始するまでは、前記押圧力変更手段によって前記従動ローラの前記駆動ローラに対する押圧力を弱い状態に変更することを特徴とする請求項1、2又は3記載の記録媒体の長さ検出装置である。
請求項5記載の発明は、前記第2の移動手段と前記第1の移動手段との間の移動経路に、前記制御手段によって通電制御され、前記記録媒体の種類を判別するための種類判別手段を有し、前記制御手段は、前記記録媒体の先端であると判断した場合に、前記種類判別手段に通電して種類の判別を行うことを特徴とする請求項1〜4のいずれかに記載の記録媒体の長さ検出装置である。
請求項6記載の発明は、前記第2の移動手段と前記第1の移動手段との間の移動経路に、前記記録媒体のJAMを検出し、その検出信号を前記制御手段に送信するJAM検出手段を有し、前記制御手段は、前記第2の移動手段により前記記録媒体の移動を開始してから所定時間経過しても、前記回転量検出手段からのパルス信号を受信していない場合、前記JAM検出手段による検出信号を受信しているか否かを参照し、前記JAM検出手段による検出信号を受信している場合、JAMが発生していると判断し、前記第2の移動手段による前記記録媒体の移動を停止することを特徴とする請求項1〜5のいずれかに記載の記録媒体の長さ検出装置である。
請求項7記載の発明は、前記第2の移動手段と前記第1の移動手段との間の移動経路に、前記記録媒体のJAMを検出し、その検出信号を前記制御手段に送信するJAM検出手段を有し、前記制御手段は、前記第2の移動手段により前記記録媒体の移動を開始してから所定時間経過しても、前記回転量検出手段からのパルス信号を受信していない場合、前記JAM検出手段による検出信号を受信しているか否かを参照し、前記JAM検出手段による検出信号を受信していない場合、記録媒体が無いと判断し、前記第2の移動手段の駆動を停止することを特徴とする請求項1〜6のいずれかに記載の記録媒体の長さ検出装置である。
請求項8記載の発明は、請求項1〜7のいずれかに記載の記録媒体の長さ検出装置を有することを特徴とする記録媒体搬送装置である。
請求項9記載の発明は、請求項1〜7のいずれかに記載の記録媒体の長さ検出装置を有することを特徴とする記録装置である。
請求項1記載の発明によれば、記録媒体の端部検出のための専用のセンサを設けなくても、ローラの回転量を検出するための構成を利用して端部検出が可能となり、それによって記録媒体の長さを検出することができる。従って、装置の低廉化を図り、制御対象の削減により制御を高速、安定化させ、制御値と実際の値との誤差を低減することができる記録媒体の長さ検出装置を提供することができる。
請求項2記載の発明によれば、以上の効果に加えて、記録媒体の端部が駆動ローラと従動ローラとの間に突き当たった際に、駆動ローラが記録媒体の進入に応じて回転できるので、記録媒体の端部を両ローラ間に円滑に挟み込ませることができ、詰まりを発生させるおそれがない。
請求項3記載の発明によれば、以上の効果に加えて、回転量検出手段が記録媒体を検出するまでは、駆動ローラを回転自由な状態にするので、記録媒体の先端が駆動ローラと従動ローラとの間に突き当たっても、両ローラが共に回転して記録媒体を両ローラ間に円滑に挟み込ませて通過させることができるので、詰まりを発生させるおそれがない。
請求項4記載の発明によれば、以上の効果に加えて、回転量検出手段が記録媒体を検出するまでは、従動ローラの駆動ローラに対する押圧力を弱い状態に変更するので、記録媒体の先端が駆動ローラと従動ローラとの間に突き当たっても、従動ローラが円滑に回転するので、詰まりを発生させるおそれが少ない。
請求項5記載の発明によれば、以上の効果に加えて、記録媒体の先端が第1の移動手段まで来た時点で、種類判別手段による種類判別が可能となるため、記録媒体の移動を開始してから種類を判別するまでにかかる時間を短縮することができる。
請求項6記載の発明によれば、以上の効果に加えて、JAM検出手段に加えて、第1の移動手段の駆動ローラ又は従動ローラの回転量を検出することで記録媒体の移動量を検出するための移動量検出手段を利用することによって、JAMの発生を正確に検出することができる。
請求項7記載の発明によれば、以上の効果に加えて、JAM検出手段に加えて、第1の移動手段の駆動ローラ又は従動ローラの回転量を検出することで記録媒体の移動量を検出するための移動量検出手段を利用することによって、記録媒体無しの発生を正確に検出することができる。
請求項8記載の発明によれば、以上の効果を奏する長さ検出装置を有する記録媒体搬送装置を提供することができる。
請求項9記載の発明によれば、以上の効果を奏する長さ検出装置を有する記録装置を提供することができる。
以下、本発明の実施の形態を図面を参照して詳細に説明する。
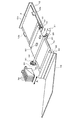
図1は本発明に係る記録媒体の長さ検出装置を、記録媒体を搬送するための搬送装置として搭載した記録装置の主要部を示す斜視図である。
この記録装置は図示しない筐体に覆われており、各手段は図示しない左右両側板により支持されている。
記録媒体Pは複数枚が積層されて給送台12に載置されている。ここで使用される記録媒体Pとしては、紙、OHTシート等が挙げられるが、記録装置によって記録可能であれば特に問わない。
給送台12は3辺を側板12a、12b、12cによって記録媒体Pを載置する位置を規定している。3辺の側板12a、12b、12cのうちの少なくともいずれか1辺の側板は記録媒体Pの幅に対応してスライド可能になっており、どの幅の記録媒体Pに対しても所定の位置に記録媒体Pを規定できるようになっている。
給送台12に積層載置された記録媒体Pの先端側は、給送ローラ10と給送板13との間に挟持されている。給送板13はコイルばね等からなる弾圧部材14によって記録媒体Pを給送ローラ10側に向けて圧着している。
給送ローラ10は表面が表面粗さの大きいゴムによって覆われており、記録媒体Pとの摩擦係数が大きくなっている。また、給送板13の表面にはゴムシートが貼られており、記録媒体Pとの摩擦係数が大きくなっている。
給送ローラ10は、図1では示されていない駆動源である給送モータ11(図3参照)によって自ら回転可能になっている。これにより給送ローラ10を回転させると、給送台12に積層載置された複数枚の記録媒体Pの上から1枚目だけが搬送されるようになっている。
なお、ここで、記録媒体Pが給送台12から搬送されていく際の搬送方向先頭側の端部を記録媒体Pの先端といい、その反対側の端部を記録媒体Pの後端という。また、記録媒体Pが給送台12から搬送されていく際の搬送方向を順方向といい、その反対の搬送方向を逆方向という。
給送モータ11は供給される電圧を正負に切り替えることにより正逆方向に回転できるので、正電圧を供給して正回転させることにより給送ローラ10を正回転させ、記録媒体Pを上流から下流へ(図1における右上方向から左下方向へ)と順方向に搬送可能とし、また負電圧を供給して逆回転させることにより給送ローラ10を逆回転させ、記録媒体Pを逆方向に搬送可能としている。
これら給送ローラ10及び給送モータ11は、本発明における第2の移動手段に相当する。
給送ローラ10の下流側には搬送ローラ20が設けられている。搬送ローラ20は、駆動源である搬送モータ21によって自ら回転可能な駆動ローラである。搬送ローラ20には、図示しない転がり軸受けによって支持された搬送押さえローラ22が弾圧部材によって圧着されている。この搬送押さえローラ22は、搬送ローラ20の回転や記録媒体Pの搬送に従動して回転する従動ローラである。記録媒体Pは、これら搬送ローラ20及び搬送押さえローラ22の間に挟み込まれて押圧されながら、搬送モータ21の駆動によって搬送ローラ20が回転することによって搬送される。
搬送ローラ20の表面は、表面粗さが大きくなっており、記録媒体Pとの摩擦係数を大きくしている。また、搬送ローラ20の表面を記録媒体Pとの摩擦係数が大きくなるような材料(ゴム、セラミック等)によって覆う構成でもよい。
この搬送ローラ20は、回転停止した状態で搬送押さえローラ22との間に記録媒体Pの端部が進入してきた時、その記録媒体Pの詰まりの発生を防止して、搬送ローラ20と搬送押さえローラ22との間に円滑に挟み込ませることができるようにするため、記録媒体Pの移動に応じて回転可能な構成を有していることが好ましい。
この一例としては、搬送ローラ20と搬送モータ21との間に、電磁力によって搬送モータ21の動力伝達を接続状態と非接続状態とに切り替えるクラッチ23を設けることが挙げられる。
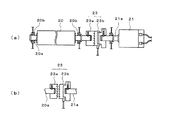
このクラッチ23を含む搬送ローラ20の詳細を図2に示す。
クラッチ23は、対向する一対のクラッチ板23a、23bを有している。一方のクラッチ板23aは搬送ローラ20の回転軸20aの一端に設けられ、他方のクラッチ板23bは搬送モータ21の駆動軸21aの先端に設けられている。このクラッチ23に電流を流すと、図2(a)に示すように、対向するクラッチ板23a、23bが衝合して接続され、搬送ローラ20に搬送モータ21からの動力伝達が行われる。また、クラッチ23に電流を流さない場合は、図2(b)に示すように、クラッチ板23a、23bは互いに離間して接続されず、搬送ローラ20に搬送モータ21からの動力伝達は行われない。
搬送ローラ20は軸受け20b、20bによって支持され、小さい外力によって回転可能になっている。
クラッチ23に電流を流さないで給送ローラ10を回転させた場合、搬送ローラ20は、給送ローラ10によって記録媒体Pが搬送されてきたとき等に、その記録媒体Pの搬送に従動して自由に回転できるようになっている。これによって記録媒体Pの円滑な搬送が停滞するおそれはない。
このように、搬送ローラ20は、クラッチ23の接続により、搬送モータ21から動力伝達されて自ら回転する駆動状態と、クラッチ23の非接続により、給送ローラ10による記録媒体Pの搬送に従動して回転する回転自由な状態とに切り替えられるようになっており、本発明における切替手段を構成している。
搬送モータ21は供給される電圧を正負に切り替えることにより正逆方向に回転できるので、クラッチ23が接続された状態で、正電圧を供給して正回転させることにより搬送ローラ20を正回転させ、記録媒体Pを上流から下流へと順方向に搬送可能とし、また負電圧を供給して逆回転させることにより搬送ローラ20を逆回転させ、記録媒体Pを逆方向へと搬送可能としている。
これら搬送ローラ20、搬送モータ21、搬送押さえローラ22及びクラッチ23は、本発明における第1の移動手段に相当する。
搬送押さえローラ22の回転軸には円板に放射状の目盛が形成されたロータリーエンコーダ30が設けられていると共に、このロータリーエンコーダ30にエンコーダセンサ31が設けられており、搬送押さえローラ22の回転量を検出できるようになっている。エンコーダセンサ31の検出信号は、図1では示されていない制御部80(図3参照)に送信される。
搬送ローラ20の下流側には、排出ローラ40が設けられており、図1では示されていない駆動源である排出モータ41(図3参照)によって自ら回転可能になっている。排出ローラ40には、図示しない転がり軸受けによって支持された排出押さえローラ42が弾圧部材によって圧着されており、排出ローラ40の回転に従動して回転するようになっている。記録媒体Pは、これら排出ローラ40及び排出押さえローラ42の間に挟み込まれて押圧されながら、排出ローラ40が回転することによって搬送される。
排出ローラ40の表面は、表面粗さが大きくなっており、排出ローラ40と記録媒体Pとの摩擦係数を大きくしている。また、排出ローラ40の表面を記録媒体Pとの摩擦係数が大きくなるような材料(ゴム、セラミック等)によって覆う構成でもよい。
また、排出モータ41は供給される電圧を正負に切り替えることにより正逆方向に回転できるので、正電圧を供給して正回転させることにより排出ローラ40を正回転させ、記録媒体Pを上流から下流へと順方向に搬送可能とし、また負電圧を供給して逆回転させることにより排出ローラ40を逆回転させ、記録媒体Pを逆方向に搬送可能としている。排出ローラ40が正回転して記録媒体Pを搬送すると、記録媒体Pは排出台43に排出される。
これら排出ローラ40、排出モータ41及び排出押さえローラ42は、本発明における第3の移動手段に相当する。
給送ローラ10と搬送ローラ20との間には、記録媒体Pの種類を検出するための種類判別センサ50が設けられている。種類判別センサ50は、光を発光するLED等からなる発光部と、光を受光して電圧に変換することにより制御部80に送信する受光部とによって構成されている。受光部は光電効果によって光量を電圧に変換する素子によって構成される。そして、制御部80に受信される電圧量によって、普通紙であるかOHTシートであるか等、記録媒体Pの種類を判別するようになっている。この種類判別センサ50は、記録媒体Pの種類判別に必要な所定の時間だけ、制御部80からの通電によって動作される。なお、種類判別センサ50の構成は、記録媒体Pの種類の判別が可能であれば必ずしも上記の方法によらなくてもよい。
また、同じく給送ローラ10と搬送ローラ20との間には、記録媒体PのJAM(詰まり)を検出するためのJAMセンサ60が設けられている。JAMセンサ60は、JAMによって浮き上がった記録媒体Pと接触すると、制御部80に電圧を送信するスイッチによって構成されている。なお、JAMセンサ60の構成は、記録媒体PのJAMを検出可能であれば必ずしも上記の方法によらなくてもよい。
搬送ローラ20と排出ローラ40との間の搬送経路の上方には記録ヘッド70が配置されている。記録ヘッド70は、ここでは微量な液体(インク)を液滴状にして記録媒体Pに吐出することにより記録を行ういわゆるインクジェット記録ヘッドからなる記録手段である。しかし、本発明では記録手段の記録方式は何ら限定されず、例えばトナーによる方式や熱転写方式等でもよい。この記録ヘッド70はキャリッジ72に着脱可能に支持されている。キャリッジ72は図示しない軸と板によって支持されており、図1では示されていないキャリッジモータ71(図3参照)によって矢印Aで示す方向(主走査方向)に沿って往復移動可能になっている。
搬送ローラ20と排出ローラ40との間には、平板状の載置台73が配設されており、記録ヘッド70の直下まで搬送されてきた記録媒体Pの表面を平滑に保つように、その記録媒体Pの下面側を支持するようになっている。
なお、図1に示す記録装置では、給送ローラ10から排出ローラ40までの距離は、使用される最小サイズの記録媒体Pの搬送方向に沿う長さよりも短く設定されているが、本発明では、少なくとも給送ローラ10と搬送ローラ20との間の距離及び搬送ローラ20と排出ローラ40との間の距離が、それぞれ使用される最小サイズの記録媒体Pの搬送方向に沿う長さよりも短く設定されていればよい。
図3は本発明に係る記録装置の主要構成を示すブロック図である。
図中、80は記録装置全体の制御を司る制御部である。制御部80には、ROM81、RAM82、画像格納部83、操作部84、キャリッジモータ71、給送モータ11、搬送モータ21、排出モータ41、JAMセンサ60、クラッチ23、種類判別センサ50、エンコーダセンサ31、記録ヘッド70が接続されている。
ROM81には、記録媒体Pの端部検出動作の手順情報や、記録媒体Pの種類に関する情報や、エンコーダセンサ31から検出される1パルス当たりの記録媒体長さに関する情報等が記憶されている。
RAM82には、記録に用いる画像情報等が記憶されている。
画像格納部83には、ユーザが作成した画像情報が記録されている。
操作部84は、ユーザから記録に関する指示を制御部80に送信することや、制御部80からユーザに情報を表示することができるようになっている。
次に、かかる記録装置における記録媒体Pの端部検出と長さ検出の各検出動作について、図4に示すフローチャート、図5に示すタイミングチャート及び図6(a)〜(i)に示す記録媒体位置を示す記録装置の側面図を用いて説明する。
なお、以下に記載する動作No.(1)〜(10)の各動作No.は、図4及び図5中に示す(1)〜(10)と図6中に示す動作No.(1)〜(10)とにそれぞれ対応している。
<動作No.(1)>
まず、ユーザが図3に示す操作部84にある記録開始の指示を行うと、制御部80は操作部84から記録を開始する指示パルスを受信する(S1)。次いで、制御部80は画像格納部83から画像情報をRAM82に送信させる(S2)。また、制御部80はクラッチ23への電流供給を停止し、搬送モータ21からの動力伝達を非接続にして搬送ローラ20を回転自由な状態にし、給送ローラ10による記録媒体Pの搬送に従動して回転するように切り替える(S3)。更に、給送モータ11に一定の正電圧を供給して給送ローラ10を正方向に回転させ、記録媒体Pを給送台12から搬送ローラ20に向けて搬送させる(S4)。
まず、ユーザが図3に示す操作部84にある記録開始の指示を行うと、制御部80は操作部84から記録を開始する指示パルスを受信する(S1)。次いで、制御部80は画像格納部83から画像情報をRAM82に送信させる(S2)。また、制御部80はクラッチ23への電流供給を停止し、搬送モータ21からの動力伝達を非接続にして搬送ローラ20を回転自由な状態にし、給送ローラ10による記録媒体Pの搬送に従動して回転するように切り替える(S3)。更に、給送モータ11に一定の正電圧を供給して給送ローラ10を正方向に回転させ、記録媒体Pを給送台12から搬送ローラ20に向けて搬送させる(S4)。
<動作No.(2)>
制御部80は、操作部84から記録を開始する指示パルスを受信してから時間t1を計数している(S5)。そして、時間t1を計数した後は、制御部80はJAMセンサ60から電圧を受信しているかどうかを参照する(S6)。
制御部80は、操作部84から記録を開始する指示パルスを受信してから時間t1を計数している(S5)。そして、時間t1を計数した後は、制御部80はJAMセンサ60から電圧を受信しているかどうかを参照する(S6)。
ここで、JAMセンサ60から電圧を受信している場合(S6でYESの場合)、記録媒体Pは詰まり等によって搬送ローラ20まで移動できずに搬送経路上で浮き上がっていると判断し、操作部84に“JAM”とエラー表示をして動作を停止させる(S7)。
一方、JAMセンサ60から電圧を受信していない場合(S6でNOの場合)、次に制御部80はエンコーダセンサ31からパルスを受信しているかを参照する(S8)。そして、エンコーダセンサ31からパルスを受信していない場合(S8でNOの場合)、制御部80は記録媒体Pが給送台12に置かれていないと判断し、操作部84に“紙無し”とエラー表示をして動作を停止させる(S9)。一方、エンコーダセンサ31からパルスを受信している場合(S8でYESの場合)、制御部80は記録媒体Pの先端が搬送ローラ20に差し掛かり、搬送押さえローラ22との間で押圧されたと判断し、給送モータ11への電圧供給を停止させる(S10)。
このようにエンコーダセンサ31からのパルスを受信することによって、記録媒体Pの先端が搬送ローラ20に差し掛かったことが判断される。すなわち、記録媒体Pの先端が検出される。記録媒体Pの先端が検出されると、ここで制御部80は種類判別センサ50に電圧を供給する(S11)。
種類判別センサ50は、ここで供給された電圧により、発光部にあるLEDから記録媒体Pに向けて光を発光させると、発光部からの光が記録媒体Pを透過し、受光部において光を受光する。受光部では、受光した光を光電効果素子によって電圧に変換して制御部80に送信する。制御部80は種類判別センサ50の受光部から受信した電圧量を計測し、それを予めROM81に記憶されている電圧量と記録媒体Pの種類との関係から記録媒体Pの種類を判断し、操作部84に記録媒体Pの種類を表示させる(S12)。種類判別センサ50への通電後、所定時間して記録媒体Pの種類判別が完了したら、制御部80は種類判別センサ50への電圧供給を停止する。
<動作No.(3)>
一定時間経過後、制御部80は種類判別センサ50への電圧供給を停止させる(S13)。そして、クラッチ23に電圧供給し、搬送ローラ20を搬送モータ21によって駆動可能な状態に切り替える(S14)。その後は、給送モータ11と搬送モータ21に電圧供給し、エンコーダセンサ31からのパルスを受信しながら、記録媒体Pを排出ローラ40へ向けて搬送させる(S15)。
一定時間経過後、制御部80は種類判別センサ50への電圧供給を停止させる(S13)。そして、クラッチ23に電圧供給し、搬送ローラ20を搬送モータ21によって駆動可能な状態に切り替える(S14)。その後は、給送モータ11と搬送モータ21に電圧供給し、エンコーダセンサ31からのパルスを受信しながら、記録媒体Pを排出ローラ40へ向けて搬送させる(S15)。
<動作No.(4)>
搬送ローラ20によって記録媒体Pを搬送している間は、搬送押さえローラ22が回転することによってエンコーダセンサ31からパルスが発信され続ける。制御部80はこのエンコーダセンサ31から受信するパルス数を計数し、このパルス数がN1となるまで受信する(S16)。このパルス数N1は、記録媒体Pが搬送ローラ20から排出ローラ40までの距離だけ搬送されるパルス数に相当するものであり、予めROM81に記憶されている。従って、計数されるパルス数がN1となることにより、記録媒体Pの先端が排出ローラ40まで達したと判断される。
搬送ローラ20によって記録媒体Pを搬送している間は、搬送押さえローラ22が回転することによってエンコーダセンサ31からパルスが発信され続ける。制御部80はこのエンコーダセンサ31から受信するパルス数を計数し、このパルス数がN1となるまで受信する(S16)。このパルス数N1は、記録媒体Pが搬送ローラ20から排出ローラ40までの距離だけ搬送されるパルス数に相当するものであり、予めROM81に記憶されている。従って、計数されるパルス数がN1となることにより、記録媒体Pの先端が排出ローラ40まで達したと判断される。
ここで制御部80は、搬送モータ21への電圧供給を停止し(S17)、更にクラッチ23への電圧供給を停止して、搬送モータ21からの動力伝達を非接続にして搬送ローラ20を回転自由な状態にし、排出ローラ40による記録媒体Pの搬送に従動して回転可能となるように切り替える(S18)。そして、排出モータ41に電圧を供給し、排出ローラ40によって記録媒体Pを搬送させる(S19)。
<動作No.(5)>
記録媒体Pが排出ローラ40によって搬送されるようになると、やがて記録媒体Pの後端は搬送ローラ20から離れ、搬送押さえローラ22の回転が停止することによって、エンコーダセンサ31からパルスが発信されない状態となる。制御部80は、エンコーダセンサ31からパルスが受信されない時間を計数し、それが時間t2だけ計数されると、記録媒体Pの後端が搬送ローラ20から離れたと判断する(S20)。これにより制御部80は、給送モータ11と排出モータ41への電圧供給を停止し(S21)、一旦、記録媒体Pの搬送を停止させて、記録媒体Pの長さ検出を行う。
記録媒体Pが排出ローラ40によって搬送されるようになると、やがて記録媒体Pの後端は搬送ローラ20から離れ、搬送押さえローラ22の回転が停止することによって、エンコーダセンサ31からパルスが発信されない状態となる。制御部80は、エンコーダセンサ31からパルスが受信されない時間を計数し、それが時間t2だけ計数されると、記録媒体Pの後端が搬送ローラ20から離れたと判断する(S20)。これにより制御部80は、給送モータ11と排出モータ41への電圧供給を停止し(S21)、一旦、記録媒体Pの搬送を停止させて、記録媒体Pの長さ検出を行う。
記録媒体Pの長さ検出は、エンコーダセンサ31から受信したパルス数N’を計数し、予めROM81に記憶されている1パルス当たりの記録媒体長さl0を乗算することにより行う。そして、その算出結果を記録媒体長さとして操作部84に表示させると共にROM81に記憶させる(S22)。
記録媒体Pの長さを検出したら、記録媒体Pを記録ヘッド70によって記録可能な位置まで搬送させる。すなわち、排出モータ41に負電圧を供給し、排出ローラ40を今までとは反対に逆回転させて、記録媒体Pを逆方向に搬送する(S23)。
<動作No.(6)>
排出ローラ40を逆方向に回転させて記録媒体Pを逆方向に搬送すると、やがて記録媒体Pの後端は再び搬送ローラ20まで達し、搬送押さえローラ22との間で押圧される。これによって搬送押さえローラ22は回転し、エンコーダセンサ31からパルスが発信される。従って、制御部80は、エンコーダセンサ31から再びパルスを受信したとき、記録媒体Pの後端が搬送ローラ20に差し掛かり、搬送押さえローラ22との間で押圧されたと判断する(S24)。ここで制御部80は、クラッチ23に電圧を供給し(S25)、搬送モータ21に負電圧を供給して搬送ローラ20を逆方向に回転させる(S26)。これにより記録媒体Pを給送ローラ10に向けて逆方向に搬送する。
排出ローラ40を逆方向に回転させて記録媒体Pを逆方向に搬送すると、やがて記録媒体Pの後端は再び搬送ローラ20まで達し、搬送押さえローラ22との間で押圧される。これによって搬送押さえローラ22は回転し、エンコーダセンサ31からパルスが発信される。従って、制御部80は、エンコーダセンサ31から再びパルスを受信したとき、記録媒体Pの後端が搬送ローラ20に差し掛かり、搬送押さえローラ22との間で押圧されたと判断する(S24)。ここで制御部80は、クラッチ23に電圧を供給し(S25)、搬送モータ21に負電圧を供給して搬送ローラ20を逆方向に回転させる(S26)。これにより記録媒体Pを給送ローラ10に向けて逆方向に搬送する。
<動作No.(7)>
記録媒体Pを逆方向に搬送している間、制御部80はエンコーダセンサ31からのパルスを受信し続け、このパルス数がN2となるまで計数する(S27)。このパルス数N2は、記録媒体Pが搬送ローラ20から給送ローラ10までの距離だけ搬送されるパルス数に相当するものであり、予めROM81に記憶されている。従って、これにより記録媒体Pの後端が給送ローラ10まで達したと判断される。
記録媒体Pを逆方向に搬送している間、制御部80はエンコーダセンサ31からのパルスを受信し続け、このパルス数がN2となるまで計数する(S27)。このパルス数N2は、記録媒体Pが搬送ローラ20から給送ローラ10までの距離だけ搬送されるパルス数に相当するものであり、予めROM81に記憶されている。従って、これにより記録媒体Pの後端が給送ローラ10まで達したと判断される。
ここで制御部80は、搬送モータ21への負電圧供給を停止し(S28)、更にクラッチ23への電圧供給を停止して搬送ローラ20を回転自由な状態にし(S29)、給送モータ11に負電圧を供給して、給送ローラ10を逆方向に回転させる(S30)。これにより記録媒体Pを更に逆方向に搬送する。
<動作No.(8)>
記録媒体Pが給送ローラ10によって逆方向に搬送されるようになると、やがて記録媒体Pの先端は搬送ローラ20から離れ、搬送押さえローラ22の回転が停止することによって、エンコーダセンサ31からパルスが発信されない状態となる。従って、制御部80は、エンコーダセンサ31からのパルスが受信されない時間を計数し、それが時間t2だけ計数されると、記録媒体Pの先端が搬送ローラ20から離れたと判断する(S31)。これにより制御部80は、給送モータ11と排出モータ41への負電圧供給を停止し(S32)、今度は、給送モータ11に正電圧を供給して、給送ローラ10を正方向に回転させる(S33)。この後、記録媒体Pを順方向に搬送して記録媒体Pの先端を再び検出させる。
記録媒体Pが給送ローラ10によって逆方向に搬送されるようになると、やがて記録媒体Pの先端は搬送ローラ20から離れ、搬送押さえローラ22の回転が停止することによって、エンコーダセンサ31からパルスが発信されない状態となる。従って、制御部80は、エンコーダセンサ31からのパルスが受信されない時間を計数し、それが時間t2だけ計数されると、記録媒体Pの先端が搬送ローラ20から離れたと判断する(S31)。これにより制御部80は、給送モータ11と排出モータ41への負電圧供給を停止し(S32)、今度は、給送モータ11に正電圧を供給して、給送ローラ10を正方向に回転させる(S33)。この後、記録媒体Pを順方向に搬送して記録媒体Pの先端を再び検出させる。
<動作No.(9)>
その後、制御部80は、エンコーダセンサ31から再びパルスを受信したとき、記録媒体Pの先端が搬送ローラ20と搬送押さえローラ22との間に押圧されたと判断する(S34)。これにより制御部80は、給送モータ11への電圧供給を停止し(S35)、クラッチ23に電圧を供給し(S36)、更に搬送モータ21に正電圧を供給する(S37)。これにより、記録媒体Pを記録ヘッド70によって記録できる位置まで順方向に搬送する。
その後、制御部80は、エンコーダセンサ31から再びパルスを受信したとき、記録媒体Pの先端が搬送ローラ20と搬送押さえローラ22との間に押圧されたと判断する(S34)。これにより制御部80は、給送モータ11への電圧供給を停止し(S35)、クラッチ23に電圧を供給し(S36)、更に搬送モータ21に正電圧を供給する(S37)。これにより、記録媒体Pを記録ヘッド70によって記録できる位置まで順方向に搬送する。
<動作No.(10)>
搬送ローラ20によって記録媒体Pを順方向に搬送している間、制御部80はエンコーダセンサ31から受信されるパルスを計数し、このパルス数がN3となるまで受信する(S38)。このパルス数N3は、記録媒体Pが搬送ローラ20から記録ヘッド70によって記録可能な位置までの距離だけ搬送されるパルス数に相当するものであり、予めROM81に記憶されている。
搬送ローラ20によって記録媒体Pを順方向に搬送している間、制御部80はエンコーダセンサ31から受信されるパルスを計数し、このパルス数がN3となるまで受信する(S38)。このパルス数N3は、記録媒体Pが搬送ローラ20から記録ヘッド70によって記録可能な位置までの距離だけ搬送されるパルス数に相当するものであり、予めROM81に記憶されている。
ここで制御部80は、搬送モータ21への電圧供給を停止して、キャリッジモータ21に電圧を供給し、RAM82から記録ヘッド70に画像情報を送信させる。これにより記録ヘッド70から記録媒体Pに向けて画像情報に応じてインクを吐出させ、主走査方向に沿って1ライン分の所定の記録を行う(S39)。
以上が、記録媒体Pの端部検出と長さ検出の各検出動作を行うための制御部80の動作についての一例である。記録媒体Pの長さが予め検出されていることやユーザによって設定されていることにより、記録媒体Pの長さが既知である場合は、長さ検出は不要として、動作No.(1)の次は動作No.(9)まで飛ばして制御するようにしてもよい。
また、記録媒体Pを給送台12から搬送ローラ20へと搬送する手段は、給送モータ11の駆動による給送ローラ10の回転によるものではなく、ユーザの手動による手差し給送によるものでもよい。
搬送ローラ20と搬送押さえローラ22とによって記録媒体Pを押圧する力(挟み込む力)は、搬送ローラ20を駆動させて記録媒体Pを搬送させるときは大きくして、搬送ローラ20と記録媒体Pとのすべりを防止することが望ましい。しかし、その一方で、搬送されてきた記録媒体Pの先端又は後端を搬送ローラ20と搬送押さえローラ22との間に挟み込むとき、搬送ローラ20と搬送押さえローラ22との間で記録媒体Pを押圧する力が大きいと、記録媒体Pが搬送ローラ20と搬送押さえローラ22との間に円滑に挟み込まれずに、JAMが発生するおそれが考えられる。
そこで、搬送ローラ20と搬送押さえローラ22との間に記録媒体Pを挟み込むとき、すなわち、クラッチ23への電圧供給を停止して搬送ローラ20が給送ローラ10又は排出ローラ40による記録媒体Pの順方向又は逆方向の搬送に従動して回転する回転自由な状態に切り替えたときは、それに連動して搬送押さえローラ22の搬送ローラ20に対する押圧力を小さくさせるように、押圧力を変更可能とすることが好ましい。
図7は、このような押圧力変更手段を備えた搬送ローラ20及び搬送押さえローラ22の構成の一例を示す斜視図であり、図8(a)(b)はその駆動の様子を示す側面図である。
搬送押さえローラ22は、その回転軸の両端がそれぞれ支持部材221、221の一端に回転可能に支持されている。なお、ここでは、搬送ローラ20に設けられるクラッチ23や搬送モータ21、及び、搬送押さえローラ22に設けられるロータリーエンコーダ30、エンコーダセンサ31は図示省略されている。
各支持部材221、221は、共通の揺動軸222によって搬送押さえローラ22側を搬送ローラ20表面に対して接する方向と、搬送ローラ20表面から離れる方向との間で揺動させることができるように支持されている。また、各支持部材221、221の搬送押さえローラ22を支持している端部と反対の他端は、支持部材221、221の間が板部材からなる押圧操作部223によって連結されている。
押圧操作部223の上面には、カム224、224のカム面が当接している。カム224、224には、押圧力変更モータ225によって回転される回転軸226が偏芯状に取り付けられており、この押圧力変更モータ225の駆動によって回転することで、押圧操作部223への押圧力を規定するようになっている。この押圧力変更モータ225は、図3に示す制御部80によって制御される。
また、押圧操作部223の下方には、支持板227が設けられている。支持板227の表面には押圧ばね228が設けられており、押圧操作部223の下面を上方に向けて押圧し、押圧操作部223の上面を、常時、カム224、224のカム面に当接させるようになっている。
クラッチ23に電圧供給して搬送ローラ20と搬送押さえローラ22との間に記録媒体Pを挟み込み、搬送ローラ20を回転させて搬送させる場合、図8(a)に示すように、押圧力変更モータ225を駆動してカム224、224を回転させ、搬送押さえローラ22が搬送ローラ20の表面に向けて強く押圧するように支持部材221、221を揺動させる。
一方、クラッチ23の電圧供給を停止して、搬送ローラ20を給送ローラ10又は排出ローラ40による記録媒体Pの順方向又は逆方向の搬送に従動して自由に回転する状態に切り替えた場合、図8(b)に示すように、押圧力変更モータ225を駆動してカム224、224を回転させ、搬送押さえローラ22が搬送ローラ20の表面に向けて弱く押圧するように支持部材221、221を揺動させる。
これにより、搬送ローラ20と搬送押さえローラ22との間で記録媒体Pを押圧する力を強弱に変更することができる。従って、記録媒体Pの搬送時は、押圧力が強くなるように変更することで、すべりなく正確に搬送できるようになると共に、記録媒体Pの先端又は後端の挟み込み時は、押圧力が弱くなるように変更することで、円滑に挟み込まれるようにしてJAMの発生を防止できるようになる。
なお、本発明では、第1の移動手段に、クラッチ23による切替手段と搬送押さえローラ22の押圧力を変更する押圧力変更手段との双方が設けられていることが最も好ましいが、切替手段又は押圧力変更手段のいずれか一方のみが設けられるだけでもよい。
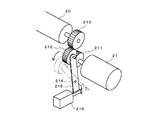
また、切替手段によって搬送ローラ20を駆動状態と回転自由な状態とに切り替える構成は、以上説明した電磁力によるクラッチ23を用いた構成に限らない。例えば、図9に示すように、搬送モータ21の動力を搬送ローラ20まで伝達する歯車211、212、213のかみ合いを離間させる構成によるものでもよい。
ここでは、搬送モータ21の回転軸に取り付けられた歯車211の回転を、中間歯車212を介して搬送ローラ20の回転軸に取り付けられた歯車213に伝達するように構成されている。中間歯車212は、軸214によって揺動可能な支持部材215の一端に取り付けられている。この支持部材215の他端は、電磁弁等からなる切替弁216と接続されており、この切替弁216の駆動によって、中間歯車212を、図9の実線で示すように歯車211及び歯車213とそれぞれかみ合わせて動力を伝達させる状態と、図9の二点鎖線で示すように歯車211及び歯車213から離間させて動力を伝達させない状態とに移動させる。
以上説明した実施形態では、本発明に係る記録媒体の長さ検出装置を記録装置における記録ヘッド70による記録を行うために搬送する搬送装置として用いるようにしたが、単に記録媒体を搬送してその先端又は後端を検出したり、記録媒体長さを検出するだけのように、記録とは別個の搬送機構或いは検出機構として設けられるだけでもよい。
また、制御部80は、図5に示すように、エンコーダセンサ31から受信されるパルス信号の立ち上がりをトリガとして制御動作を実行するようにしているが、パルス信号の立ち下がりをトリガとして利用するようにしてもよい。また、パルス信号をFV変換した電圧値から検出するようにすることもできる。
更に、搬送ローラ20が記録媒体Pの移動に応じて回転可能な構成、例えば切替手段によって駆動状態と回転自由な状態とに切替可能とされる場合、ロータリーエンコーダ30は、この搬送ローラ20の回転軸に設けられるようにしてもよい。
10:給送ローラ
11:給送モータ
12:給送台
12a、12b、12c:側板
13:給送板
14:弾圧部材
20:搬送ローラ
21:搬送モータ
22:搬送押さえローラ
23:クラッチ
30:ロータリーエンコーダ
31:エンコーダセンサ
40:排出ローラ
41:排出モータ
42:排出押さえローラ
43:排出台
50:種類判別センサ
60:JAMセンサ
70:記録ヘッド
71:キャリッジモータ
72:キャリッジ
80:制御部
81:ROM
82:RAM
83:画像格納部
84:操作部
11:給送モータ
12:給送台
12a、12b、12c:側板
13:給送板
14:弾圧部材
20:搬送ローラ
21:搬送モータ
22:搬送押さえローラ
23:クラッチ
30:ロータリーエンコーダ
31:エンコーダセンサ
40:排出ローラ
41:排出モータ
42:排出押さえローラ
43:排出台
50:種類判別センサ
60:JAMセンサ
70:記録ヘッド
71:キャリッジモータ
72:キャリッジ
80:制御部
81:ROM
82:RAM
83:画像格納部
84:操作部
Claims (9)
- 記録媒体を一対のローラ間に挟み込んで移動させる第1の移動手段と、
前記第1の移動手段の上流側に位置し、前記記録媒体を前記第1の移動手段まで移動させる第2の移動手段と、
前記第1の移動手段の下流側に位置し、前記第1の移動手段を経由した前記記録媒体を移動させる第3の移動手段と、
前記第1の移動手段のいずれかのローラの回転量に応じてパルス信号を発信する回転量検出手段と、
前記第1の移動手段、前記第2の移動手段及び前記第3の移動手段の駆動をそれぞれ制御すると共に、前記記録媒体の先端を検出した時点から後端を検出した時点までの前記回転量検出手段からのパルス信号の数に基づいて、前記記録媒体の長さを検出するようにした制御手段とを有し、
前記制御手段は、前記第2の移動手段によって前記記録媒体を前記第1の移動手段に向けて移動させた後、前記第1の移動手段のローラが前記記録媒体の移動に応じて回転して前記回転量検出手段からのパルス信号の受信を開始した時点で、前記記録媒体の先端であると判断し、前記第1の移動手段を経由した前記記録媒体の移動を前記第3の移動手段によって開始させた後、前記第1の移動手段のローラが前記記録媒体の通過により回転停止して前記回転量検出手段からのパルス信号を受信しなくなった時点で、前記記録媒体の後端であると判断することを特徴とする記録媒体の長さ検出装置。 - 前記第1の移動手段は、駆動手段によって駆動される駆動ローラと該駆動ローラの回転に従動して回転する従動ローラからなり、回転停止している前記駆動ローラと前記従動ローラとの間に前記記録媒体の端部が進入した時に、前記駆動ローラが前記記録媒体の進入に応じて回転可能な構成を有していることを特徴とする請求項1記載の記録媒体の長さ検出装置。
- 前記第1の移動手段は、前記駆動手段の前記駆動ローラへの駆動力の伝達を接続する状態と、該駆動力の伝達を切断して前記駆動ローラを回転自由な状態とに切り替える切替手段を有し、
前記制御手段は、前記回転量検出手段からのパルス信号の受信を開始するまでは、前記切替手段によって前記駆動ローラを回転自由な状態に切り替えることにより、前記記録媒体の進入に応じて前記駆動ローラが回転可能な構成であることを特徴とする請求項2記載の記録媒体の長さ検出装置。 - 前記第1の移動手段は、前記従動ローラの前記駆動ローラに対する押圧力を強い状態と弱い状態とに変更する押圧力変更手段を有し、
前記制御手段は、前記回転量検出手段からのパルス信号の受信を開始するまでは、前記押圧力変更手段によって前記従動ローラの前記駆動ローラに対する押圧力を弱い状態に変更することを特徴とする請求項1、2又は3記載の記録媒体の長さ検出装置。 - 前記第2の移動手段と前記第1の移動手段との間の移動経路に、前記制御手段によって通電制御され、前記記録媒体の種類を判別するための種類判別手段を有し、
前記制御手段は、前記記録媒体の先端であると判断した場合に、前記種類判別手段に通電して種類の判別を行うことを特徴とする請求項1〜4のいずれかに記載の記録媒体の長さ検出装置。 - 前記第2の移動手段と前記第1の移動手段との間の移動経路に、前記記録媒体のJAMを検出し、その検出信号を前記制御手段に送信するJAM検出手段を有し、
前記制御手段は、前記第2の移動手段により前記記録媒体の移動を開始してから所定時間経過しても、前記回転量検出手段からのパルス信号を受信していない場合、前記JAM検出手段による検出信号を受信しているか否かを参照し、前記JAM検出手段による検出信号を受信している場合、JAMが発生していると判断し、前記第2の移動手段による前記記録媒体の移動を停止することを特徴とする請求項1〜5のいずれかに記載の記録媒体の長さ検出装置。 - 前記第2の移動手段と前記第1の移動手段との間の移動経路に、前記記録媒体のJAMを検出し、その検出信号を前記制御手段に送信するJAM検出手段を有し、
前記制御手段は、前記第2の移動手段により前記記録媒体の移動を開始してから所定時間経過しても、前記回転量検出手段からのパルス信号を受信していない場合、前記JAM検出手段による検出信号を受信しているか否かを参照し、前記JAM検出手段による検出信号を受信していない場合、記録媒体が無いと判断し、前記第2の移動手段の駆動を停止することを特徴とする請求項1〜6のいずれかに記載の記録媒体の長さ検出装置。 - 請求項1〜7のいずれかに記載の記録媒体の長さ検出装置を有することを特徴とする記録媒体搬送装置。
- 請求項1〜7のいずれかに記載の記録媒体の長さ検出装置を有することを特徴とする記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006061886A JP2007238251A (ja) | 2006-03-07 | 2006-03-07 | 記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006061886A JP2007238251A (ja) | 2006-03-07 | 2006-03-07 | 記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007238251A true JP2007238251A (ja) | 2007-09-20 |
Family
ID=38584157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006061886A Pending JP2007238251A (ja) | 2006-03-07 | 2006-03-07 | 記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007238251A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012082031A (ja) * | 2010-10-07 | 2012-04-26 | Ricoh Co Ltd | シート材搬送装置、画像読取装置および画像形成装置 |
| JP2015063379A (ja) * | 2013-09-26 | 2015-04-09 | 株式会社Isowa | 段ボールシート製函機の給紙装置 |
| US9004487B2 (en) | 2012-12-28 | 2015-04-14 | Ricoh Company, Ltd. | Sheet conveying device and image forming apparatus |
-
2006
- 2006-03-07 JP JP2006061886A patent/JP2007238251A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012082031A (ja) * | 2010-10-07 | 2012-04-26 | Ricoh Co Ltd | シート材搬送装置、画像読取装置および画像形成装置 |
| US8641035B2 (en) * | 2010-10-07 | 2014-02-04 | Ricoh Company, Limited | Sheet conveying apparatus, image reading apparatus, and image forming apparatus |
| US9004487B2 (en) | 2012-12-28 | 2015-04-14 | Ricoh Company, Ltd. | Sheet conveying device and image forming apparatus |
| JP2015063379A (ja) * | 2013-09-26 | 2015-04-09 | 株式会社Isowa | 段ボールシート製函機の給紙装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8267509B2 (en) | Inkjet recording apparatus | |
| JP5549409B2 (ja) | 画像記録装置 | |
| US8894065B2 (en) | Printing apparatus and method for conveying sheet | |
| JP5447417B2 (ja) | 画像記録装置 | |
| JP2007238251A (ja) | 記録媒体の長さ検出装置、記録媒体搬送装置及び記録装置 | |
| JP5482611B2 (ja) | インクジェット記録装置 | |
| JP2009154368A (ja) | インクジェット記録装置 | |
| JP5862173B2 (ja) | 画像記録装置 | |
| US20080025782A1 (en) | Printer and printer control method | |
| JP4548362B2 (ja) | 被記録媒体給送装置、記録装置、液体噴射装置 | |
| US10183507B2 (en) | Image recording apparatus and image recording method | |
| JP2018144904A (ja) | 搬送装置とそれを含む記録装置、及び寸法検知方法とそれを含む搬送方法と記録方法 | |
| EP1743774A2 (en) | Feeding device | |
| JP2010155345A (ja) | 画像形成装置 | |
| US20120242038A1 (en) | Printing apparatus and printing method | |
| JP4697440B2 (ja) | 記録装置、液体噴射装置 | |
| JP7067009B2 (ja) | 画像記録装置 | |
| JP6107566B2 (ja) | 画像記録装置 | |
| JP7009888B2 (ja) | 画像記録装置 | |
| JP5811318B2 (ja) | 印刷装置、及び印刷方法 | |
| JP2000185856A (ja) | ロールシート供給装置及び画像形成装置 | |
| JP6217897B2 (ja) | 記録装置 | |
| JP2006076118A (ja) | 被記録媒体検出装置、記録装置、液体噴射装置 | |
| JP2025103303A (ja) | 印刷装置 | |
| JP2005179021A (ja) | 記録装置及び液体噴射装置 |