JP2007282475A - リニアモータとアクチュエータ - Google Patents
リニアモータとアクチュエータ Download PDFInfo
- Publication number
- JP2007282475A JP2007282475A JP2007028147A JP2007028147A JP2007282475A JP 2007282475 A JP2007282475 A JP 2007282475A JP 2007028147 A JP2007028147 A JP 2007028147A JP 2007028147 A JP2007028147 A JP 2007028147A JP 2007282475 A JP2007282475 A JP 2007282475A
- Authority
- JP
- Japan
- Prior art keywords
- linear motor
- thrust
- coil
- phase coil
- permanent magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Control Of Linear Motors (AREA)
- Linear Motors (AREA)
Abstract
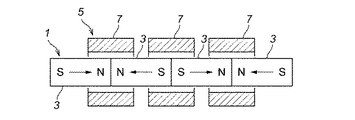
【解決手段】 永久磁石と、一個又は複数個のコイルと、を具備してなるリニアモータにおいて、上記コイルに位相差「0°」又は位相差「180°」の電流を流すようにし同じ向きに推力が発生するようにしたものであり、それによって、全てのコイルが推力の発生に寄与することになるので推力の向上を図ることができる。
又、そのようなリニアモータを使用したアクチュエータ。
【選択図】 図1
Description
尚、固定子501と可動子505は相対的なものであり、永久磁石503側が可動子であって、U相コイル507、V相コイル509、W相コイル511側が固定子の場合もある。
まず、十分に大きな推力を得ることができないという問題があった。これは次のような理由による。すなわち、従来のリニアモータの場合には、既に説明したように、可動子505が三個の異なる位相のコイル、すなわち、U相コイル507、V相コイル509、W相コイル511とから構成されている。その際、三個のU相コイル507、V相コイル509、W相コイル511の全てが推力の発生に寄与するわけではなく、それが原因して十分に大きな推力を得ることができないものである。
具体的に説明すると、例えば、図7における永久磁石503とU相コイル507、V相コイル509、W相コイル511の位置関係ではV相コイル509は推力発生に対して休みとなり、U相コイル507及びW相コイル511は推力発生に対して寄与している。つまり、三相の内一相は推力の発生に対して寄与しない構成になっているものである。
特に、昨今、リニアモータに対してはその小径化が要求されており、リニアモータを小径化した場合には、断面積に比例して推力が低下することになる。よって、上記推力の低下がより顕著な問題となってしまうものである。
又、別の問題があった。すなわち、従来の構成の場合には、隣接する永久磁石503、503の界面近傍で磁界の急峻なピークを持った不均一な磁界分布となり、それが原因して推力の変動をもたらし位置決め精度が低下してしまうという問題があった。
又、請求項2によるリニアモータは、請求項1記載のリニアモータにおいて、 上記永久磁石は対向・配置された一対又は複数対から構成されていて、それら各対の永久磁石の磁化の向きが逆向きになっていることを特徴とするものである。
又、請求項3によるリニアモータは、請求項1記載のリニアモータにおいて、 上記コイルの外周部近傍に磁性材料からなるヨークを設置したことを特徴とするものである。
又、請求項4によるリニアモータは、請求項3記載のリニアモータにおいて、 上記磁性材料からなるヨークは上記永久磁石の可動範囲より長いものであることを特徴とするものである。
又、請求項5によるリニアモータは、請求項1記載のリニアモータにおいて、 上記永久磁石は対向・配置された一対又は複数対から構成されていて、それら各対の永久磁石は直接又はベースを介して接着・固定されていることを特徴とするものである。
又、請求項6によるアクチュエータは、請求項1〜請求項5の何れかに記載のリニアモータを使用したことを特徴とするものである。
又、請求項7によるリニアモータは、永久磁石と、三相コイルと、を具備してなるリニアモータにおいて、上記三相コイルの外周部近傍に磁性材料からなるヨークを設置したことを特徴とするものである。
又、請求項8によるリニアモータは、請求項7記載のリニアモータにおいて、上記磁性材料からなるヨークは上記永久磁石の可動範囲より長いものであることを特徴とするものである。
又、請求項9によるリニアモータは、請求項7記載のリニアモータにおいて、 上記三相コイルの駆動を正弦波駆動としたことを特徴とするものである。
又、請求項10によるアクチュエータは、請求項7〜請求項9の何れかに記載のリニアモータを使用したことを特徴とするものである。
又、請求項2によるリニアモータは、請求項1記載のリニアモータにおいて、 上記永久磁石は対向・配置された一対又は複数対から構成されていて、それら各対の永久磁石の磁化の向きが逆向きになっているので、隣接する永久磁石の境界近傍で磁束が急峻でありストロークをより長く確保できる。
又、請求項3によるリニアモータは、請求項1記載のリニアモータにおいて、 上記コイルの外周部近傍に磁性材料からなるヨークを設置した構成になっているので、磁気回路における磁気抵抗の低減を図ることができ、それによって、推力の向上を図ることができる。
又、請求項4によるリニアモータは、請求項3記載のリニアモータにおいて、 上記磁性材料からなるヨークは上記永久磁石の可動範囲より長いものとなっているので、永久磁石の移動範囲においては磁気吸引の変動が生ずることはなく、いわゆる「ゴギング」による推力の変動を除去或いは軽減させることができる。
又、請求項5によるリニアモータは、請求項1記載のリニアモータにおいて、 上記永久磁石は対向・配置された一対又は複数対から構成されていて、それら各対の永久磁石は直接又はベースを介して接着・固定されているので、これによっても磁気抵抗の軽減が図られ推力を向上させることができる。永久磁石の設置作業が容易化されるものである。
又、請求項6によるアクチュエータは、請求項1〜請求項5の何れかに記載のリニアモータを使用したものであり、大きな推力で高い精度で位置決めを行うことができる。
又、請求項7によるリニアモータは、永久磁石と、三相コイルと、を具備してなるリニアモータにおいて、上記三相コイルの外周部近傍に磁性材料からなるヨークを設置した構成になっているので、磁気回路における磁気抵抗の低減を図ることができ、それによって、三相コイルタイプのリニアモータにおいても推力の向上を図ることができる。
又、請求項8によるリニアモータは、請求項7記載のリニアモータにおいて、上記磁性材料からなるヨークは上記永久磁石の可動範囲より長いものとなっているので、永久磁石の移動範囲においては磁気吸引の変動が生ずることはなく、いわゆる「ゴギング」による推力の変動を除去或いは軽減させることができる。
又、請求項9によるリニアモータは、請求項7記載のリニアモータにおいて、 上記三相コイルの駆動を正弦波駆動としているので、推力の変動を抑制することができる。
又、請求項10によるアクチュエータは、請求項7〜請求項9の何れかに記載のリニアモータを使用しているので、大きな推力で高い精度で位置決めを行うことができる。
まず、推力の向上を図ることができる。これは、本実施の形態における全てのコイル7は、略同じ大きさの電流を流すことで略同じ向きと大きさの推力を発生することができ、その結果、全てのコイル7が推力の発生に寄与することになるからである。
図2を参照して本願発明の第2の実施の形態を説明する。図2に示す第2の実施の形態の場合には、永久磁石3の磁化の向きが図2中上下方向になっている。この点が前記第1の実施の形態によるリニアモータと違うところである。
尚、その他の構成は前記第1の実施の形態の場合と同じであり、図中同一部分には同一符号を付して示しその説明は省略する。
そして、この場合には、隣接する永久磁石3、3の境界付近の磁束反転は比較的なだらかなものとなる。よって、コイル7はこのなだらかな磁束反転領域を回避しなければ均一な磁束は通過せず推力の変動が生じてしまい、その結果、コイル7の移動領域は制限されることになりストロークが短くなってしまう。その点、既に説明した第1の実施の形態の場合には、隣接する永久磁石3の境界近傍で磁束が急峻でありストロークをより長く確保できる。
しかしながら、推力の向上を図る点においては前記第1の実施の形態の場合と同様の効果を奏することができる。
尚、その他の構成は前記第1の実施の形態の場合と同様であり、同一部分には同一符号を付して示しその説明は省略する。
又、この実施の形態の場合には、永久磁石113とコイル105との間の隙間をできるだけ小さくするために、永久磁石113、113同士を接着によって接合しており、又、シャフト115、117についても同様に接着・接合するようにしている。そして、永久磁石113とコイル105との間の隙間をできるだけ小さくすることができたので、永久磁石113の「N極」から「S極」に向かう磁束の磁気抵抗を低減させることができる。そして、コイル105を通過する磁束の密度を高めて推進力を向上させることが可能になる。
因みに、従来の場合には、例えば、ステンレス製のパイプ内に永久磁石を収容して固定するようにしているので、そのステンレスパイプの厚みの分だけ永久磁石とコイルとの間の隙間が大きくなってしまうものである。
尚、アクチュエータの横断面形状としては、円形、四角形(正方形、長方形等)等様々な形状が想定される。
又、この実施の形態の場合には、前述したように、上記ヨーク103を軸方向に十分に長いものとし、少なくとも、永久磁石113の可動範囲より長い構成になっているので、永久磁石113の移動範囲において磁気吸引の変動が生ずることはない。
尚、その他の構成については前記第4の実施の形態の場合と同じであり、同一部分には同一符号を付して示しその説明は省略する。
尚、V相コイル203は三相コイルのY結線のため他のコイルとは逆向きになっている。
この切り替えポイントが図6における電気角90°の箇所である(図6中符号Bで指し示す箇所)。このコイル切り替え時はW相コイル205、V相コイル203において最も推力が落ちる箇所である。ここではトータルの推力も最少となり、矩形波駆動では推力の変動か大きくなってしまう。
又、正弦波駆動方式を採用しているので推力の変動も効果的に抑制されるものである。
例えば、コイルの個数、配置等についてはこれを特に限定するものではない。
又、前記第1〜第5の実施の形態の場合には、コイル側を固定子として永久磁石側を可動子としたが、その逆の構成も考えられる。
その他、図示した構成はあくまで一例である。
3 永久磁石
5 固定子
7 コイル
21 ヨーク
101 固定子
103 ヨーク
105 コイル
107 ガイド部材
109 ガイド部材
111 可動子
113 永久磁石
115 シャフト
117 シャフト
201 U相コイル
203 V相コイル
205 W相コイル
Claims (10)
- 永久磁石と、一個又は複数個のコイルと、を具備してなるリニアモータにおいて、
上記コイルに位相差「0°」又は位相差「180°」の電流を流すことにより同じ向きに推力が発生するようにしたことを特徴とするリニアモータ。 - 請求項1記載のリニアモータにおいて、
上記永久磁石は対向・配置された一対又は複数対から構成されていて、それら各対の永久磁石の磁化の向きが逆向きになっていることを特徴とするリニアモータ。 - 請求項1記載のリニアモータにおいて、
上記コイルの外周部近傍に磁性材料からなるヨークを設置したことを特徴とするリニアモータ。 - 請求項3記載のリニアモータにおいて、
上記磁性材料からなるヨークは上記永久磁石の可動範囲より長いものであることを特徴とするリニアモータ。 - 請求項1記載のリニアモータにおいて、
上記永久磁石は対向・配置された一対又は複数対から構成されていて、それら各対の永久磁石は直接又はベースを介して接着・固定されていることを特徴とするリニアモータ。 - 請求項1〜請求項5の何れかに記載のリニアモータを使用したことを特徴とするアクチュエータ。
- 永久磁石と、三相コイルと、を具備してなるリニアモータにおいて、
上記三相コイルの外周部近傍に磁性材料からなるヨークを設置したことを特徴とするリニアモータ。 - 請求項7記載のリニアモータにおいて、
上記磁性材料からなるヨークは上記永久磁石の可動範囲より長いものであることを特徴とするリニアモータ。 - 請求項7記載のリニアモータにおいて、
上記三相コイルの駆動を正弦波駆動としたことを特徴とするリニアモータ。 - 請求項7〜請求項9の何れかに記載のリニアモータを使用したことを特徴とするアクチュエータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007028147A JP2007282475A (ja) | 2006-03-13 | 2007-02-07 | リニアモータとアクチュエータ |
| PCT/JP2007/069724 WO2008096479A1 (ja) | 2007-02-07 | 2007-10-10 | リニアモータとリニアモータ型グリッパとアクチュエータ |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006067460 | 2006-03-13 | ||
| JP2007028147A JP2007282475A (ja) | 2006-03-13 | 2007-02-07 | リニアモータとアクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007282475A true JP2007282475A (ja) | 2007-10-25 |
Family
ID=38683327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007028147A Pending JP2007282475A (ja) | 2006-03-13 | 2007-02-07 | リニアモータとアクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007282475A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009194991A (ja) * | 2008-02-13 | 2009-08-27 | Iai:Kk | リニアモータとアクチュエータ |
| JP2010011572A (ja) * | 2008-06-25 | 2010-01-14 | Hoya Corp | 回転型アクチュエータ |
| US7934878B2 (en) | 2008-04-17 | 2011-05-03 | Hoya Corporation | Diaphragm driving device of a camera system using an interchangeable lens |
| US8131140B2 (en) | 2009-02-05 | 2012-03-06 | Pentax Ricoh Imaging Company, Ltd. | Linear actuator and camera shake correction mechanism |
| CN105703593A (zh) * | 2015-09-23 | 2016-06-22 | 歌尔声学股份有限公司 | 线性振动马达 |
| WO2018082005A1 (zh) * | 2016-11-04 | 2018-05-11 | 宇生自然能源科技股份有限公司 | 双磁助电动装置 |
| WO2018098654A1 (zh) * | 2016-11-30 | 2018-06-07 | 宇生自然能源科技股份有限公司 | 电动机给电控制结构 |
| CN108134545A (zh) * | 2016-11-30 | 2018-06-08 | 宇生自然能源科技股份有限公司 | 电动机给电控制结构 |
| KR20250156992A (ko) * | 2024-04-26 | 2025-11-04 | (주)멘토티앤씨 | 리니어 마그네틱 피커 구동장치 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0638486A (ja) * | 1992-07-20 | 1994-02-10 | Tdk Corp | 可動磁石式アクチュエータ |
| JPH11225468A (ja) * | 1998-02-05 | 1999-08-17 | Minolta Co Ltd | シャフト型リニアモータ |
| JP2002291220A (ja) * | 2001-01-17 | 2002-10-04 | Kuronofangu Kk | リニアモータ |
| JP2005094902A (ja) * | 2003-09-17 | 2005-04-07 | Canon Inc | 移動装置 |
| JP2005192322A (ja) * | 2003-12-25 | 2005-07-14 | Toshiba Mach Co Ltd | リニア同期モータ |
| JP2006005155A (ja) * | 2004-06-17 | 2006-01-05 | Juki Corp | 電子部品実装装置 |
| JP2006050864A (ja) * | 2004-08-09 | 2006-02-16 | Oriental Motor Co Ltd | シリンダ形リニアモータ |
-
2007
- 2007-02-07 JP JP2007028147A patent/JP2007282475A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0638486A (ja) * | 1992-07-20 | 1994-02-10 | Tdk Corp | 可動磁石式アクチュエータ |
| JPH11225468A (ja) * | 1998-02-05 | 1999-08-17 | Minolta Co Ltd | シャフト型リニアモータ |
| JP2002291220A (ja) * | 2001-01-17 | 2002-10-04 | Kuronofangu Kk | リニアモータ |
| JP2005094902A (ja) * | 2003-09-17 | 2005-04-07 | Canon Inc | 移動装置 |
| JP2005192322A (ja) * | 2003-12-25 | 2005-07-14 | Toshiba Mach Co Ltd | リニア同期モータ |
| JP2006005155A (ja) * | 2004-06-17 | 2006-01-05 | Juki Corp | 電子部品実装装置 |
| JP2006050864A (ja) * | 2004-08-09 | 2006-02-16 | Oriental Motor Co Ltd | シリンダ形リニアモータ |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009194991A (ja) * | 2008-02-13 | 2009-08-27 | Iai:Kk | リニアモータとアクチュエータ |
| US7934878B2 (en) | 2008-04-17 | 2011-05-03 | Hoya Corporation | Diaphragm driving device of a camera system using an interchangeable lens |
| JP2010011572A (ja) * | 2008-06-25 | 2010-01-14 | Hoya Corp | 回転型アクチュエータ |
| US8149520B2 (en) | 2008-06-25 | 2012-04-03 | Pentax Ricoh Imaging Company, Ltd. | Rotary actuator for auto-focusing a camera lens |
| US8131140B2 (en) | 2009-02-05 | 2012-03-06 | Pentax Ricoh Imaging Company, Ltd. | Linear actuator and camera shake correction mechanism |
| US10574126B2 (en) | 2015-09-23 | 2020-02-25 | Goertek Inc. | Linear vibration motor |
| CN105703593A (zh) * | 2015-09-23 | 2016-06-22 | 歌尔声学股份有限公司 | 线性振动马达 |
| WO2018082005A1 (zh) * | 2016-11-04 | 2018-05-11 | 宇生自然能源科技股份有限公司 | 双磁助电动装置 |
| WO2018098654A1 (zh) * | 2016-11-30 | 2018-06-07 | 宇生自然能源科技股份有限公司 | 电动机给电控制结构 |
| CN108134545A (zh) * | 2016-11-30 | 2018-06-08 | 宇生自然能源科技股份有限公司 | 电动机给电控制结构 |
| CN108134545B (zh) * | 2016-11-30 | 2021-02-26 | 宇生自然能源科技股份有限公司 | 电动机给电控制结构 |
| KR20250156992A (ko) * | 2024-04-26 | 2025-11-04 | (주)멘토티앤씨 | 리니어 마그네틱 피커 구동장치 |
| KR102890685B1 (ko) | 2024-04-26 | 2025-11-27 | (주)멘토티앤씨 | 리니어 마그네틱 피커 구동장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007282475A (ja) | リニアモータとアクチュエータ | |
| CN102187556B (zh) | 线性致动器 | |
| US9059626B2 (en) | Electric machine with linear mover | |
| JP2009189091A (ja) | 直線型アクチュエータ | |
| US8786142B2 (en) | Linear motor | |
| JP2023029428A (ja) | レンズ鏡筒、撮像装置 | |
| Luo et al. | Design of voice coil motor with the forward winding for linear vibro-impact systems | |
| JP2008295245A (ja) | 交流モータ | |
| JP6625766B2 (ja) | モーターの構造 | |
| JP5589507B2 (ja) | リニア駆動装置の可動子及び固定子 | |
| JP5637458B2 (ja) | リニアモータ | |
| JP6340219B2 (ja) | リニアモータ | |
| JP2009194991A (ja) | リニアモータとアクチュエータ | |
| JP4972442B2 (ja) | 直動形電動機の永久磁石配置構造 | |
| JP6340218B2 (ja) | リニアモータ | |
| JP2023140403A (ja) | 筒型リニアモータ | |
| JPH1169763A (ja) | シャフト型リニアモータ及びその駆動方法 | |
| JP2015089189A (ja) | リニアモータ | |
| JP5991841B2 (ja) | 円筒型リニアモータ | |
| JP2005229778A (ja) | リニアモータ | |
| JP2007244180A (ja) | リニアモータとアクチュエータ | |
| JP2015173579A (ja) | リニアモータ | |
| JP2024006584A (ja) | リニアモータ | |
| JP2007209176A (ja) | 三相リニアモータ | |
| JP2012060853A (ja) | 2自由度アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120125 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120321 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120725 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120924 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130107 |