JP2007326040A - 遠心機 - Google Patents
遠心機 Download PDFInfo
- Publication number
- JP2007326040A JP2007326040A JP2006159314A JP2006159314A JP2007326040A JP 2007326040 A JP2007326040 A JP 2007326040A JP 2006159314 A JP2006159314 A JP 2006159314A JP 2006159314 A JP2006159314 A JP 2006159314A JP 2007326040 A JP2007326040 A JP 2007326040A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- motor
- reference value
- acceleration gradient
- circuit device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Centrifugal Separators (AREA)
Abstract
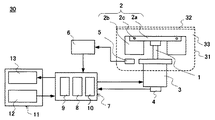
【解決手段】ロータ2として使用するロータの種類毎の加速勾配(基準値)を記憶部9に予め記憶しておき、回転速度検出器4で検出した回転速度から加速勾配ΔNoを算出し、算出した加速勾配ΔNoと、ロータ判別器6から判別したロータについて記憶部9に予め記憶してある所定の加速勾配ΔNmとを比較し、算出した加速勾配ΔNoが基準値ΔNm以上である場合はモータ3またはロータ2を正常運転させる正常制御モードで制御し、算出加速勾配ΔNoが基準値ΔNmより小さい場合はモータ3またはロータ2を正常制御モードと異なる異常制御モードで制御するように構成する。
【選択図】図1
Description
2b:ロータのバケット 3:モータ 4:回転検出器
5:ロータ検出器 6:ロータ判別器 7:制御回路装置
8:演算制御部 9:記憶部 10:モータ駆動部
11:操作部 12:入力部 13:表示部 30:遠心機
31:隔壁部材 32:ドア 33:ロータ室
Claims (10)
- 遠心分離する試料を保持するロータと、前記ロータを回転させるモータと、前記モータを駆動するためのモータ駆動手段と、前記ロータの運転条件を設定する操作部と、前記モータまたは前記ロータの回転を検出する回転数検出手段と、記憶部および演算制御部を具備し、前記操作部の設定信号および前記回転数検出手段の回転検出信号を受けて、前記モータ駆動手段を制御する制御回路装置とを具備する遠心機において、
前記制御回路装置は、前記記憶部によって前記モータまたは前記ロータの加速時における回転速度の変化量を表す加速勾配の基準値を予め記憶させておき、加速時に前記演算制御部によって前記回転数検出手段で検出した前記モータまたは前記ロータの回転速度から加速勾配を算出し、算出した加速勾配と前記記憶部に予め記憶させた前記加速勾配の基準値とを比較し、算出した加速勾配が前記基準値以上である場合は前記モータまたは前記ロータを正常運転させる正常制御モードで制御し、前記算出加速勾配が前記基準値より小さい場合は前記モータまたは前記ロータを前記正常制御モードと異なる異常制御モードで制御することを特徴とする遠心機。 - 前記異常制御モードは、前記モータまたは前記ロータの回転を停止させるか、或いは前記操作部から設定された前記モータまたは前記ロータの回転速度を下げる制御を含むことを特徴とする請求項1に記載された遠心機。
- 前記制御回路装置は、前記ロータに試料を許容値まで実装した時の加速勾配を前記基準値として前記記憶部に記憶させておくことを特徴とする請求項1または請求項2に記載された遠心機。
- 前記制御回路装置は、前記モータまたは前記ロータの回転速度の変化量を表す加速勾配の基準値を使用するロータの種類毎に前記記憶部に記憶しておくことを特徴とする請求項1乃至請求項3のいずれか一つに記載された遠心機。
- 前記制御回路装置は、前記モータまたは前記ロータの制御が異常制御モードである場合、前記操作部が具備する表示部に警告を表示することを特徴とする請求項1乃至請求項4のいずれか一つに記載された遠心機。
- 前記制御回路装置は、加速勾配の前記基準値として複数の値を前記記憶部に記憶し、前記回転数検出手段で検出した前記モータまたは前記ロータの回転速度から算出した前記加速勾配を、前記複数の基準値と比較することを特徴とする請求項1乃至請求項5のいずれか一つに記載された遠心機。
- 遠心分離する試料を保持するロータと、前記ロータを回転させるモータと、前記モータを駆動するためのモータ駆動手段と、前記ロータの運転条件を設定する操作部と、前記モータまたは前記ロータの回転を検出する回転数検出手段と、記憶部および演算制御部を具備し、前記操作部の設定信号および前記回転数検出手段の回転検出信号を受けて、前記モータ駆動手段を制御する制御回路装置とを具備する遠心機において、
前記制御回路装置は、前記記憶部によって前記モータまたは前記ロータの加速時における回転速度の変化量を表す加速勾配の、少なくとも第1および第2の基準値を予め記憶させておき、加速時に前記演算制御部によって前記回転数検出手段で検出した前記モータまたは前記ロータの回転速度から加速勾配を算出し、算出した加速勾配と前記記憶部に予め記憶させた前記加速勾配の前記第1の基準値とを比較し、算出した加速勾配が前記第1の基準値以上である場合は前記モータまたは前記ロータを正常運転させる正常制御モードで制御し、前記算出加速勾配が前記第1の基準値より小さい場合は前記モータまたは前記ロータを前記正常制御モードと異なる異常制御モードで制御し、さらに前記異常制御モードにおいて前記算出加速勾配を前記第2の基準値と比較して前記モータまたは前記ロータを制御することを特徴とする遠心機。 - 前記制御回路装置は、前記ロータに試料を許容値まで実装した時の加速勾配を前記第1の基準値として前記記憶部に記憶させておくことを特徴とする請求項7に記載された遠心機。
- 前記制御回路装置は、前記ロータに試料を限界許容値まで実装した時の加速勾配を前記第2の基準値として前記記憶部に記憶させておくことを特徴とする請求項7に記載された遠心機。
- 前記制御回路装置は、前記算出した加速勾配が前記第1の基準値より小さく前記第2の基準値以上の場合、前記異常制御モードにおいて前記モータまたは前記ロータの回転速度を低減させ、前記算出加速勾配が前記第2の基準値より小さい場合、前記異常制御モードにおいて前記モータまたは前記ロータの回転を停止させることを特徴とする請求項7乃至請求項9のいずれか一つに記載された遠心機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006159314A JP4840724B2 (ja) | 2006-06-08 | 2006-06-08 | 遠心機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006159314A JP4840724B2 (ja) | 2006-06-08 | 2006-06-08 | 遠心機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007326040A true JP2007326040A (ja) | 2007-12-20 |
| JP4840724B2 JP4840724B2 (ja) | 2011-12-21 |
Family
ID=38926899
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006159314A Expired - Fee Related JP4840724B2 (ja) | 2006-06-08 | 2006-06-08 | 遠心機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4840724B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010221203A (ja) * | 2009-03-25 | 2010-10-07 | Hitachi Koki Co Ltd | 遠心機用ロ−タ及び遠心機 |
| JP2014117642A (ja) * | 2012-12-14 | 2014-06-30 | Hitachi Koki Co Ltd | 遠心機 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5819291A (ja) * | 1981-07-27 | 1983-02-04 | 松下電器産業株式会社 | 洗濯脱水機の脱水制御装置 |
| JPH04267956A (ja) * | 1991-02-22 | 1992-09-24 | Hitachi Koki Co Ltd | 遠心機 |
| JPH07116552A (ja) * | 1993-10-20 | 1995-05-09 | Hitachi Koki Co Ltd | 遠心分離機 |
| JP2005230751A (ja) * | 2004-02-20 | 2005-09-02 | Hitachi Koki Co Ltd | 遠心機 |
-
2006
- 2006-06-08 JP JP2006159314A patent/JP4840724B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5819291A (ja) * | 1981-07-27 | 1983-02-04 | 松下電器産業株式会社 | 洗濯脱水機の脱水制御装置 |
| JPH04267956A (ja) * | 1991-02-22 | 1992-09-24 | Hitachi Koki Co Ltd | 遠心機 |
| JPH07116552A (ja) * | 1993-10-20 | 1995-05-09 | Hitachi Koki Co Ltd | 遠心分離機 |
| JP2005230751A (ja) * | 2004-02-20 | 2005-09-02 | Hitachi Koki Co Ltd | 遠心機 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010221203A (ja) * | 2009-03-25 | 2010-10-07 | Hitachi Koki Co Ltd | 遠心機用ロ−タ及び遠心機 |
| JP2014117642A (ja) * | 2012-12-14 | 2014-06-30 | Hitachi Koki Co Ltd | 遠心機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4840724B2 (ja) | 2011-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1243146C (zh) | 用于检测洗衣机洗衣桶失衡的方法及装置 | |
| CN101333747B (zh) | 洗衣机 | |
| SE461279B (sv) | Metod foer balansering av en kring en vaesentligen horisontell axel roterande behaallare | |
| US7055368B2 (en) | Automatic calibration of an imbalance detector | |
| WO2006033502A1 (en) | Automatic balancing rotor for centrifuge | |
| JP4840724B2 (ja) | 遠心機 | |
| US8262551B2 (en) | Centrifuge having displacement sensor | |
| JP4242263B2 (ja) | 洗濯機 | |
| JP2011173043A (ja) | 遠心分離機および細胞処理装置 | |
| JP4593822B2 (ja) | 遠心機 | |
| US6589151B2 (en) | Centrifugal separator capable of reading a rotor identification signal under different rotor rotation conditions | |
| JP3582414B2 (ja) | 遠心機 | |
| JP2601487Y2 (ja) | 磁気軸受装置 | |
| JP4347984B2 (ja) | 遠心分離機 | |
| JP2007326038A (ja) | 遠心機 | |
| JPH03293047A (ja) | 自動遠心分離機 | |
| JP4679629B2 (ja) | 洗濯機 | |
| JP2008154314A (ja) | モータ駆動装置およびこれを備えた洗濯機 | |
| JP2006334528A (ja) | 遠心分離機 | |
| JP2003135994A (ja) | 遠心分離機 | |
| JP4179963B2 (ja) | ドラム式洗濯機 | |
| JP6990929B2 (ja) | 洗濯機 | |
| JP5237670B2 (ja) | 遠心機 | |
| JP2006035067A (ja) | 遠心分離機 | |
| JP4348144B2 (ja) | 遠心分離機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100621 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110308 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110912 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110925 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141014 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |