JP2007333636A - 路側装置、端末装置およびdgps測位システム - Google Patents
路側装置、端末装置およびdgps測位システム Download PDFInfo
- Publication number
- JP2007333636A JP2007333636A JP2006167692A JP2006167692A JP2007333636A JP 2007333636 A JP2007333636 A JP 2007333636A JP 2006167692 A JP2006167692 A JP 2006167692A JP 2006167692 A JP2006167692 A JP 2006167692A JP 2007333636 A JP2007333636 A JP 2007333636A
- Authority
- JP
- Japan
- Prior art keywords
- error
- gps satellite
- pseudo
- roadside
- pseudorange
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















Landscapes
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【課題】 マルチパス誤差を考慮したGPS測位を実現する。
【解決手段】 路側装置2を道路近くの既知の位置に設置するとともに、この路側装置2が、GPS衛星1からの電波を受信してGPS衛星1との間の第1の擬似距離d6およびGPS衛星1の第1の航法データd1を出力する第1のGPS受信機21、第1の航法データd1を用いて計算したGPS衛星1の位置d5と路側装置2の設置位置との間の直線距離および第1の擬似距離d2に基づき擬似距離誤差d6を求める擬似距離誤差計算部222と、擬似距離誤差d6に基づく補正データ5を生成する補正データ生成部223とを有する制御装置22、補正データ5を端末装置3に送信する通信機23を備えたことを特徴とする。
【選択図】 図3
【解決手段】 路側装置2を道路近くの既知の位置に設置するとともに、この路側装置2が、GPS衛星1からの電波を受信してGPS衛星1との間の第1の擬似距離d6およびGPS衛星1の第1の航法データd1を出力する第1のGPS受信機21、第1の航法データd1を用いて計算したGPS衛星1の位置d5と路側装置2の設置位置との間の直線距離および第1の擬似距離d2に基づき擬似距離誤差d6を求める擬似距離誤差計算部222と、擬似距離誤差d6に基づく補正データ5を生成する補正データ生成部223とを有する制御装置22、補正データ5を端末装置3に送信する通信機23を備えたことを特徴とする。
【選択図】 図3
Description
この発明は、DGPS測位、特に車載装置のDGPS測位を補強するための路側装置、端末装置およびDGPS測位システムに関するものである。
GPS受信機でGPS衛星からの信号を受信すると、受信信号から、GPS衛星の所定時刻における地球周回軌道上での位置、およびGPS受信機と各GPS衛星1との間の距離(擬似距離=電波伝播時間×光速)を得ることができる。また、4つ以上のGPS衛星の位置および擬似距離が揃うと、三角測量の原理により、GPS受信機の位置および時刻を求めることができる。
しかし、上記のようにGPS受信機を用いて位置および時刻を求める場合、いわゆる測位を行なう場合には、第一に、GPS衛星電波が大気中(電離層および対流圏)を通過する際の伝播遅延誤差(電離層遅延誤差および対流圏遅延誤差)が発生する。第二に、GPS衛星電波の伝播時間を計測する時計の誤差(GPS衛星搭載時計誤差、および利用者側GPS受信機内蔵時計誤差)が存在する。さらに、第三に、GPS衛星電波がビル等の建築物に反射した際に生じるマルチパス誤差と呼ぶ伝播時間遅延誤差が生じる。
しかし、上記のようにGPS受信機を用いて位置および時刻を求める場合、いわゆる測位を行なう場合には、第一に、GPS衛星電波が大気中(電離層および対流圏)を通過する際の伝播遅延誤差(電離層遅延誤差および対流圏遅延誤差)が発生する。第二に、GPS衛星電波の伝播時間を計測する時計の誤差(GPS衛星搭載時計誤差、および利用者側GPS受信機内蔵時計誤差)が存在する。さらに、第三に、GPS衛星電波がビル等の建築物に反射した際に生じるマルチパス誤差と呼ぶ伝播時間遅延誤差が生じる。
これらの誤差はGPS受信機の測位に大きな誤差を与えるため、誤差を修正する必要がある。第1の伝播遅延誤差については、GPS衛星のみを用いる単独測位では、GPS衛星電波受信時に得られるGPS衛星毎の航法データの中にあるパラメータなどを用いて伝播遅延誤差を修正することができ、DGPS測位では、DGPS基地局から補正データを入手して伝播遅延誤差を修正することができる。この補正データは、電離層遅延誤差と対流圏遅延誤差の合計値を示し、以降、DGPS補正データと称する。後述する特許文献1には、DGPS補正データを用いたDGPS測位について開示されている。
また、第2の時計誤差、特にGPS衛星搭載時計誤差についてはGPS衛星毎の航法データの中にあるパラメータを用いて時計誤差を修正することができ、利用者側GPS受信機内蔵時計誤差については測位計算時に時計誤差を修正する。航法データはGPS衛星電波に含まれる。
また、第2の時計誤差、特にGPS衛星搭載時計誤差についてはGPS衛星毎の航法データの中にあるパラメータを用いて時計誤差を修正することができ、利用者側GPS受信機内蔵時計誤差については測位計算時に時計誤差を修正する。航法データはGPS衛星電波に含まれる。
上述のように、第1の伝播遅延誤差および第2の時計誤差については修正することができるが、第3のマルチパス誤差は利用者側GPS受信機の周囲の建物の影響で生じる問題である。従来は、このマルチパス誤差は利用者側GPS受信機で個別に解決すべき誤差として扱われており、GPS測位の精度がマルチパス誤差に影響されていた。
この発明は、上記のような課題を解決するためになされたもので、マルチパス誤差を考慮したGPS測位を実現することを目的とする。
この発明に係る路側装置は、道路近くの既知の位置に設置され、GPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機、第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離および第1の擬似距離に基づき擬似距離誤差を求める擬似距離誤差計算部と、擬似距離誤差に基づく補正データを生成する補正データ生成部とを有する制御装置、補正データを端末装置に送信する通信機を備えたことを特徴とする。
また、この発明に係る路側装置は、道路近くの既知の位置に設置され、GPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機、第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離、および第1の航法データから求めたGPS衛星の速度に基づき第1の擬似距離の変化率である擬似距離変化率を求める擬似距離変化率計算部と、擬似距離変化率に基づく補正データを生成する補正データ生成部とを有する制御装置、補正データを端末装置に送信する通信機を備えたことを特徴とする。
また、この発明に係る端末装置は、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機、GPS衛星と路側装置との間の第1の擬似距離の誤差である擬似距離誤差に基づく補正データを路側装置から受信する通信機、第3の擬似距離および補正データに基づき自らの位置を算出する位置算出部を有する制御装置を備えたことを特徴とする。
また、この発明に係る端末装置は、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機、第3の航法データから求めたGPS衛星の速度および位置、自らの位置と速度、ならびに第3の擬似距離の変化率である擬似距離変化率を求める擬似距離変化率計算部と、第3の擬似距離および擬似距離変化率に基づき自らの位置を算出する位置算出部を有する制御装置を備えたことを特徴とする。
また、この発明に係るDGPS測位システムは、道路近くの既知の位置に設置されるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置、第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離、および第1の擬似距離に基づき第1の擬似距離の誤差である擬似距離誤差を求める擬似距離誤差計算手段、第3の擬似距離および擬似距離誤差に基づき端末装置の位置を算出する位置算出手段を備えたことを特徴とする。
また、この発明に係るDGPS測位システムは、道路の近くの既知の位置に設置されるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置、第1の擬似距離の変化率である第1の擬似距離変化率を計算する第1の擬似距離変化率計算手段、第3の擬似距離の変化率である第3の擬似距離変化率を計算する第3の擬似距離変化率計算手段、第1の擬似距離変化率、第3の擬似距離、および第3の擬似距離変化率に基づき端末装置の位置を算出する位置算出手段を備えたことを特徴とする。
この発明によれば、道路近くの既知の位置に設置された路側装置が、GPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機、第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離および第1の擬似距離に基づき擬似距離誤差を求める擬似距離誤差計算部と、擬似距離誤差に基づく補正データを生成する補正データ生成部とを有する制御装置、補正データを端末装置に送信する通信機を備えるので、マルチパス誤差を考慮したGPS測位を実現することができる。
また、この発明によれば、道路近くの既知の位置に設置された路側装置が、GPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機、第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離、および第1の航法データから求めたGPS衛星の速度に基づき第1の擬似距離の変化率である擬似距離変化率を求める擬似距離変化率計算部と、擬似距離変化率に基づく補正データを生成する補正データ生成部とを有する制御装置、補正データを端末装置に送信する通信機を備えるので、マルチパス誤差を考慮したGPS測位を実現し、測位精度を向上することができる。
また、この発明によれば、端末装置が、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機、GPS衛星と路側装置との間の第1の擬似距離の誤差である擬似距離誤差に基づく補正データを路側装置から受信する通信機、第3の擬似距離および補正データに基づき自らの位置を算出する位置算出部を有する制御装置を備えるので、マルチパス誤差を考慮したGPS測位を実現することができる。
また、この発明によれば、端末装置が、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機、第3の航法データから求めたGPS衛星の速度および位置、自らの位置と速度、ならびに第3の擬似距離の変化率である擬似距離変化率を求める擬似距離変化率計算部と、第3の擬似距離および擬似距離変化率に基づき自らの位置を算出する位置算出部を有する制御装置を備えるので、マルチパス誤差を考慮したGPS測位を実現することができる。
また、この発明によれば、DGPS測位システムが、道路近くの既知の位置に設置されるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置、第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離、および第1の擬似距離に基づき第1の擬似距離の誤差である擬似距離誤差を求める擬似距離誤差計算手段、第3の擬似距離および擬似距離誤差に基づき端末装置の位置を算出する位置算出手段を備えるので、マルチパス誤差を考慮したGPS測位を実現し、測位精度を向上することができる。
また、この発明によれば、DGPS測位システムが、道路の近くの既知の位置に設置されるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置、第1の擬似距離の変化率である第1の擬似距離変化率を計算する第1の擬似距離変化率計算手段、第3の擬似距離の変化率である第3の擬似距離変化率を計算する第3の擬似距離変化率計算手段、第1の擬似距離変化率、第3の擬似距離、および第3の擬似距離変化率に基づき端末装置の位置を算出する位置算出手段を備えるので、マルチパス誤差を考慮したGPS測位を実現することができる。
実施の形態1.
図1は、この発明の実施の形態1に係るDGPS測位システムを説明する構成図である。図1におけるDGPS測位システムは、GPS衛星1、道路近くに設置され且つ設置位置が既知である路側装置2および端末装置である車載装置3からなる。GPS衛星1は複数存在し、各GPS衛星1を1a、1b、1c・・・、1nと称する。また、車載装置3は車に搭載されている。
路側装置2はGPS受信機21、制御部22および通信機23からなる。GPS受信機21は道路の路側に設置されたポール4上の既知座標に設置され、GPS衛星電波を受信する。さらにポール4には通信機23も設置され、車載装置3と通信を行なう。また、GPS受信機21および通信機23は制御部22に接続している。なお、図1における二点鎖線は、路側装置2の車載装置3との通信可能範囲を示す。
路側装置2は車載装置3を搭載した車が往来する道路の路側に設置されており、車載装置3と路側装置2との間の距離は、車載装置3と一般的なDGPS基地局との間の距離よりも小さい。また、路側装置2におけるGPS衛星電波の電波状況と車載装置3におけるGPS衛星電波の電波状況とはほぼ同じであり、道路の周囲にビル等が建設されている場合でも、路側装置2および車載装置3は、同じようなマルチパスの影響を受けたGPS衛星電波を受信することになる。
図1は、この発明の実施の形態1に係るDGPS測位システムを説明する構成図である。図1におけるDGPS測位システムは、GPS衛星1、道路近くに設置され且つ設置位置が既知である路側装置2および端末装置である車載装置3からなる。GPS衛星1は複数存在し、各GPS衛星1を1a、1b、1c・・・、1nと称する。また、車載装置3は車に搭載されている。
路側装置2はGPS受信機21、制御部22および通信機23からなる。GPS受信機21は道路の路側に設置されたポール4上の既知座標に設置され、GPS衛星電波を受信する。さらにポール4には通信機23も設置され、車載装置3と通信を行なう。また、GPS受信機21および通信機23は制御部22に接続している。なお、図1における二点鎖線は、路側装置2の車載装置3との通信可能範囲を示す。
路側装置2は車載装置3を搭載した車が往来する道路の路側に設置されており、車載装置3と路側装置2との間の距離は、車載装置3と一般的なDGPS基地局との間の距離よりも小さい。また、路側装置2におけるGPS衛星電波の電波状況と車載装置3におけるGPS衛星電波の電波状況とはほぼ同じであり、道路の周囲にビル等が建設されている場合でも、路側装置2および車載装置3は、同じようなマルチパスの影響を受けたGPS衛星電波を受信することになる。
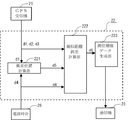
図2は、路側装置2および車載装置3の内部構成を示す図である。路側装置2は、GPS衛星1からの電波を受信してGPS衛星1との間の第1の擬似距離およびGPS衛星1の第1の航法データを出力する第1のGPS受信機であるGPS受信機21、制御装置である制御部22および補正データを車載装置に送信する通信機23からなる。GPS受信機21は、複数のGPS衛星1a、1b、・・・、1nの各GPS衛星1の電波を受信し、受信信号から得た各GPS衛星1の航法データおよび衛星電波の観測時刻、ならびに各GPS衛星1とGPS受信機21との間の擬似距離を制御部22に出力する。制御部22は、GPS受信機21から入力された航法データ、観測時刻および擬似距離を元に擬似距離誤差を計算し、この擬似距離誤差、GPS受信機21の設置座標および路側装置2の時刻を含んだ測位補強データ5を生成して、通信機23に出力する。通信機23は測位補強データ5を車載装置3に送信する。
ところで、GPS受信機21の設置座標とは、GPS受信機21のアンテナの設置座標を意味し、既知である。擬似距離を計算するためには、GPS受信機21のアンテナの設置座標が既知であることを要するが、GPS受信機21のアンテナの設置座標の替わりにポール4の座標や路側装置2全体のおおよその座標をGPS受信機21の設置座標としても良い。以降、車載装置3のGPS受信機31の座標の扱いも、上述のGPS受信機21の設置座標の扱いと同様であるものとする。
図2における車載装置3は、GPS衛星1からの電波を受信してGPS衛星1との間の第3の擬似距離およびGPS衛星1の第3の航法データを出力する第3のGPS受信機であるGPS受信機31、制御装置である制御部32およびGPS衛星1と路側装置2との間の第1の擬似距離の誤差である擬似距離誤差に基づく補正データを路側装置2から受信する通信機33からなる。GPS受信機31は、複数のGPS衛星1a、1b、・・・、1nの各GPS衛星1の電波を受信し、受信信号から得た各GPS衛星1の航法データおよび時刻、ならびに各GPS衛星1とGPS受信機31との間の擬似距離を制御部32に出力する。通信機33は、路側装置2から送信された測位補強データ5を受信して、制御部32に出力する。制御部32は、GPS受信機31や通信機33から入力された航法データ、時刻、擬似距離および測位補強データ5を元に車載装置3の現在位置を測位計算する。
ところで、路側装置2と車載装置3との間で送受信される測位補強データ5は、ヘッダ5a、送信時刻5b、データ5cおよび誤り訂正符合5dからなり、データ5cが擬似距離誤差等を含むものである。測位補強データ5のフォーマットは、図2に記載のようなフォーマットの他、別のフォーマットで擬似距離誤差等を含んでも良い。
図3は、路側装置2の制御部22の構成を示すブロック図である。制御部22は、衛星位置計算部221、航法データd1を用いて計算したGPS衛星1の位置d5と路側装置2の設置位置との間の直線距離および擬似距離d2に基づき擬似距離誤差d6を求める擬似距離誤差計算部222、および擬似距離誤差d6に基づく補正データを生成する測位補強データ生成部223からなる。
衛星位置計算部221は、GPS受信機21から入力された航法データd1、擬似距離d2および擬似距離d2を観測した時刻d3から、時刻d4およびGPS衛星1の位置である衛星位置d5を計算して擬似距離誤差計算部222に出力する。
擬似距離誤差計算部222には、航法データd1、GPS衛星1とGPS受信機21との間の擬似距離d2、および擬似距離d2を観測したGPS受信機21の時刻d3がGPS受信機21から入力され、時刻d4および衛星位置d5が衛星位置計算部221から入力される。擬似距離誤差計算部222は、これらの入力されたデータd1、d2、d3、d4およびd5、ならびにGPS受信機21の設置座標を用いて各GPS衛星1の擬似距離誤差d6を計算し、測位補強データ生成部223に出力する。
測位補強データ生成部223は擬似距離誤差d6を含んだ測位補強データ5を生成して通信機23に出力する。
衛星位置計算部221は、GPS受信機21から入力された航法データd1、擬似距離d2および擬似距離d2を観測した時刻d3から、時刻d4およびGPS衛星1の位置である衛星位置d5を計算して擬似距離誤差計算部222に出力する。
擬似距離誤差計算部222には、航法データd1、GPS衛星1とGPS受信機21との間の擬似距離d2、および擬似距離d2を観測したGPS受信機21の時刻d3がGPS受信機21から入力され、時刻d4および衛星位置d5が衛星位置計算部221から入力される。擬似距離誤差計算部222は、これらの入力されたデータd1、d2、d3、d4およびd5、ならびにGPS受信機21の設置座標を用いて各GPS衛星1の擬似距離誤差d6を計算し、測位補強データ生成部223に出力する。
測位補強データ生成部223は擬似距離誤差d6を含んだ測位補強データ5を生成して通信機23に出力する。
図4は、車載装置3の制御部32の構成を示すブロック図である。制御部32は、衛星位置計算部321、誤差計算部322、測位補強データ解読部323、および測位計算部324からなる。なお、誤差計算部322、測位補強データ解読部323および測位計算部324は、擬似距離d8および補正データ5に基づき位置を算出する位置算出部である。
衛星位置計算部321は、GPS受信機31から入力された航法データd7から所定時刻における衛星位置d10を計算して測位計算部324に出力する。
測位補強データ解読部323は、通信機33から入力された測位補強データ5をデコードして、擬似距離誤差d6、GPS受信機21の設置座標d11および路側装置2の時刻d12を抽出し、GPS受信機21の設置座標d11および時刻d12を測位計算部324に、擬似距離誤差d6を誤差計算部322に出力する。
誤差計算部322は、GPS受信機31から入力された航法データd7から、GPS衛星搭載時計誤差、電離層遅延誤差および対流圏遅延誤差を所定の計算式で算出する。なお、測位補強データ解読部323から擬似距離誤差d6が入力された場合には、GPS衛星搭載時計誤差のみ算出し、擬似距離誤差d6および算出したGPS衛星搭載時計誤差を誤差データd13として測位計算部324に出力する。また、測位補強データ解読部323から擬似距離誤差d6が入力されていない場合には、航法データd7から算出したGPS衛星搭載時計誤差、電離層遅延誤差および対流圏遅延誤差を誤差データd13として測位計算部324に出力する。
測位計算部324は、GPS受信機31から入力された擬似距離d8および時刻d9と、衛星位置計算部321、誤差計算部322および測位補強データ解読部323から入力された衛星位置d10、GPS受信機21の設置座標d11および時刻d12、ならびに誤差データd13とを用いて車載装置3の測位計算を行い、車載装置3の位置d14および時刻d15を得る。得られた車載装置3の位置d14および時刻d15は、車載装置3のモニタなどの表示部に出力される。
衛星位置計算部321は、GPS受信機31から入力された航法データd7から所定時刻における衛星位置d10を計算して測位計算部324に出力する。
測位補強データ解読部323は、通信機33から入力された測位補強データ5をデコードして、擬似距離誤差d6、GPS受信機21の設置座標d11および路側装置2の時刻d12を抽出し、GPS受信機21の設置座標d11および時刻d12を測位計算部324に、擬似距離誤差d6を誤差計算部322に出力する。
誤差計算部322は、GPS受信機31から入力された航法データd7から、GPS衛星搭載時計誤差、電離層遅延誤差および対流圏遅延誤差を所定の計算式で算出する。なお、測位補強データ解読部323から擬似距離誤差d6が入力された場合には、GPS衛星搭載時計誤差のみ算出し、擬似距離誤差d6および算出したGPS衛星搭載時計誤差を誤差データd13として測位計算部324に出力する。また、測位補強データ解読部323から擬似距離誤差d6が入力されていない場合には、航法データd7から算出したGPS衛星搭載時計誤差、電離層遅延誤差および対流圏遅延誤差を誤差データd13として測位計算部324に出力する。
測位計算部324は、GPS受信機31から入力された擬似距離d8および時刻d9と、衛星位置計算部321、誤差計算部322および測位補強データ解読部323から入力された衛星位置d10、GPS受信機21の設置座標d11および時刻d12、ならびに誤差データd13とを用いて車載装置3の測位計算を行い、車載装置3の位置d14および時刻d15を得る。得られた車載装置3の位置d14および時刻d15は、車載装置3のモニタなどの表示部に出力される。
次に、路側装置2および車載装置3の動作を説明する。なお、路側装置2および車載装置3は複数のGPS衛星1からGPS衛星電波を受信するが、ここではGPS衛星1aからGPS衛星電波を受信した場合について説明する。
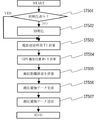
図5は、路側装置2の制御部22の動作を示すフローである。ステップST501で制御部22が初期化済みか否かをチェックし、初期化済みでなければステップST502で所定の初期化処理を行う。
次にステップST503で、衛星位置計算部221がGPS受信機21からGPS衛星1aの擬似距離ρ(cτ)が入力される度に、路側装置2において擬似距離誤差ρ(cτ)を観測した時刻から、Sagnac効果を用いてGPS衛星1aの電波送信時刻T1を逆算する。なお、衛星位置計算部221は、予め複数の擬似距離d2から時刻d4を計算しており、擬似距離誤差ρ(cτ)を観測した時刻は、時刻d4に基づき取得したものである。
続いて、衛星位置計算部221は、ステップST504でGPS衛星1aの航法データおよび所定の計算式を用いて、GPS衛星1aが電波を送信した電波送信時刻T1における衛星位置Psを計算する。
ステップST505では、擬似距離誤差計算部222がGPS衛星1aの擬似距離誤差d6を、後述する式(1)で計算して測位補強データ生成部223に出力する。
ステップST506では、測位補強データ生成部223が、データ5cに擬似距離誤差d6、GPS受信機21の設置座標d11および時刻d12が含まれた測位補強データ5を生成する。
さらに、ステップST507で擬似距離誤差計算部222が測位補強データ5を通信機23に出力するので、測位補強データ5が車載装置3に送信される。
図5は、路側装置2の制御部22の動作を示すフローである。ステップST501で制御部22が初期化済みか否かをチェックし、初期化済みでなければステップST502で所定の初期化処理を行う。
次にステップST503で、衛星位置計算部221がGPS受信機21からGPS衛星1aの擬似距離ρ(cτ)が入力される度に、路側装置2において擬似距離誤差ρ(cτ)を観測した時刻から、Sagnac効果を用いてGPS衛星1aの電波送信時刻T1を逆算する。なお、衛星位置計算部221は、予め複数の擬似距離d2から時刻d4を計算しており、擬似距離誤差ρ(cτ)を観測した時刻は、時刻d4に基づき取得したものである。
続いて、衛星位置計算部221は、ステップST504でGPS衛星1aの航法データおよび所定の計算式を用いて、GPS衛星1aが電波を送信した電波送信時刻T1における衛星位置Psを計算する。
ステップST505では、擬似距離誤差計算部222がGPS衛星1aの擬似距離誤差d6を、後述する式(1)で計算して測位補強データ生成部223に出力する。
ステップST506では、測位補強データ生成部223が、データ5cに擬似距離誤差d6、GPS受信機21の設置座標d11および時刻d12が含まれた測位補強データ5を生成する。
さらに、ステップST507で擬似距離誤差計算部222が測位補強データ5を通信機23に出力するので、測位補強データ5が車載装置3に送信される。
ここで、ステップST505において計算する擬似距離誤差dρ(T2)を説明する。GPS衛星電波受信時刻T2におけるGPS受信機21とGPS衛星1aとの間の擬似距離ρ(cτ)の誤差をdρ(T2)とすると、以下の式(1)で表すことができる。
dρ(T2)=ρ(cτ)
−(||Ps−Pa||+c(dT2−dT1)+ε) ・・・式(1)
−(||Ps−Pa||+c(dT2−dT1)+ε) ・・・式(1)
但し、式(1)において、擬似距離誤差dρ(T2)は、電離層遅延誤差diono、対流圏遅延誤差dtrop、およびマルチパス誤差dmpの合算値(diono+dtrop+dmp)である。
また、式(1)における変数の定義を以下に示す。なお、各変数の単位を[]で示す。
ρ(cτ):GPS受信機21とGPS衛星1aとの間の擬似距離[m]
c:光の速度(2.99792458×108)[s]
τ:GPS衛星1とGPS受信機21間の電波伝播時間[m/s]
Ps:航法データから算出したGPS衛星1aの位置(xs、ys、zs)[m]
Pa:GPS受信機21の設置座標(既知)(xa、ya、za)[m]
||Ps−Pa||:GPS衛星1aの位置PsとGPS受信機21の設置座標Pa
との直線距離[m]
dT1:GPS衛星電波が送信された時刻T1[s]におけるGPS衛星搭載時計の
誤差[s]
dT2:GPS衛星電波受信時T2[s]のGPS受信機21の内蔵時計の誤差[s]
ε:GPS受信機21の雑音[m]
また、式(1)における変数の定義を以下に示す。なお、各変数の単位を[]で示す。
ρ(cτ):GPS受信機21とGPS衛星1aとの間の擬似距離[m]
c:光の速度(2.99792458×108)[s]
τ:GPS衛星1とGPS受信機21間の電波伝播時間[m/s]
Ps:航法データから算出したGPS衛星1aの位置(xs、ys、zs)[m]
Pa:GPS受信機21の設置座標(既知)(xa、ya、za)[m]
||Ps−Pa||:GPS衛星1aの位置PsとGPS受信機21の設置座標Pa
との直線距離[m]
dT1:GPS衛星電波が送信された時刻T1[s]におけるGPS衛星搭載時計の
誤差[s]
dT2:GPS衛星電波受信時T2[s]のGPS受信機21の内蔵時計の誤差[s]
ε:GPS受信機21の雑音[m]
ここでは、dT1を航法データd1の中にある時計誤差モデルのパラメータを用いて所定の計算式で算出し、dT2をGPS受信機21の時刻と電波時計26の時刻とを比較して算出する。
また、εは高仰角のGPS衛星からの電波を受信した際に以下の式(2)で計算するものである。
ε=ρ(cτ)−(||Ps−Pa||+c(dT2−dT1)+diono2+dtrop2)
・・・式(2)
式(2)におけるdiono2およびdtrop2は、航法データd1から算出した電離層遅延誤差および対流圏遅延誤差である。
ε=ρ(cτ)−(||Ps−Pa||+c(dT2−dT1)+diono2+dtrop2)
・・・式(2)
式(2)におけるdiono2およびdtrop2は、航法データd1から算出した電離層遅延誤差および対流圏遅延誤差である。
図6は、車載装置3が測位補強データ5を受信した際の測位補強データ解読部323の動作を示すフローである。ステップST601で受信データ、即ち測位補強データ5の有無を確認する。受信データがあれば、ステップST602にて測位補強データ5の解読処理を行い、路側装置2のGPS受信機21とGPS衛星1aとの間の擬似距離誤差d6、GPS受信機21の設置座標d11および時刻d12を抽出する。さらにステップST603で、擬似距離誤差d6を誤差計算部322に出力し、路側装置2の座標d11および時刻d12を測位計算部324に出力する。測位補強データ5の解読および出力処理が終了、または受信データが存在しない場合は処理を終了する。
ところで、図5では、路側装置2がGPS衛星1aからのGPS衛星電波を受信した場合の動作を説明したが、路側装置2は、GPS衛星1a以外の全てのGPS衛星からGPS衛星電波を受信した場合にも図5と同様の動作を行なう。そのときには、式(1)および式(2)において、GPS衛星1aに関するデータの替わりに当該GPS衛星1a以外のGPS衛星に関するデータを代入すれば良い。それに伴い、図6において、車載装置3の測位補強データ解読部323は、GPS衛星1aの擬似距離誤差d6だけでなく、GPS衛星1a以外のGPS衛星の擬似距離誤差も誤差計算部322に出力する。
図7は、測位補強データ解読部323が測位補強データ5の解読処理を行なった後の車載装置3の制御部32の動作を示すフローである。ステップST701で制御部32が初期化済みかをチェックし、初期化済みでなければステップST702で所定の初期化処理を行う。
ステップST703で、衛星位置計算部321は、GPS受信機31からGPS衛星1aの擬似距離ρ(cτ)が入力されると、車載装置3において擬似距離誤差ρ(cτ)を観測した時刻から、Sagnac効果を用いてGPS衛星1aの電波送信時刻T1を逆算する。なお、電波送信時刻T1の逆算の際には、GPS受信機31が電波を受信をした時刻T3をGPS衛星電波の受信時刻として使用する。
続いて、衛星位置計算部321は、ステップST704でGPS衛星1aの航法データd7および所定の計算式を用いて、GPS衛星1aが電波を送信した電波送信時刻T1における衛星位置Psを計算する。
ステップST705では、誤差計算部322は、擬似距離誤差d6およびGPS衛星搭載時計誤差から誤差データd13を生成して、測位計算部324に出力する。
なお、上記のステップST701からST705では、GPS衛星1aからのGPS衛星電波を受信した場合の動作を説明したが、当該ステップは、路側装置2や測位補強データ解読部323と同様に、GPS衛星1aだけでなく、その他のGPS衛星からの電波を受信する度に動作するものである。また、図7のステップST706以降のステップも、GPS衛星1aだけでなく、各GPS衛星1に関するデータを扱う。
ステップST703で、衛星位置計算部321は、GPS受信機31からGPS衛星1aの擬似距離ρ(cτ)が入力されると、車載装置3において擬似距離誤差ρ(cτ)を観測した時刻から、Sagnac効果を用いてGPS衛星1aの電波送信時刻T1を逆算する。なお、電波送信時刻T1の逆算の際には、GPS受信機31が電波を受信をした時刻T3をGPS衛星電波の受信時刻として使用する。
続いて、衛星位置計算部321は、ステップST704でGPS衛星1aの航法データd7および所定の計算式を用いて、GPS衛星1aが電波を送信した電波送信時刻T1における衛星位置Psを計算する。
ステップST705では、誤差計算部322は、擬似距離誤差d6およびGPS衛星搭載時計誤差から誤差データd13を生成して、測位計算部324に出力する。
なお、上記のステップST701からST705では、GPS衛星1aからのGPS衛星電波を受信した場合の動作を説明したが、当該ステップは、路側装置2や測位補強データ解読部323と同様に、GPS衛星1aだけでなく、その他のGPS衛星からの電波を受信する度に動作するものである。また、図7のステップST706以降のステップも、GPS衛星1aだけでなく、各GPS衛星1に関するデータを扱う。
ステップST706は、測位計算部324がGPS受信機31から入力された各GPS衛星1の擬似距離d8に基づき、測位計算に使用するGPS衛星1を選択して測位使用衛星リストに記し、測位使用衛星のリストを作成する処理である。
また、擬似距離d8の数が5つ未満であるか、擬似距離d8の数が5つ以上でもこれらの擬似距離d8に対応するGPS衛星1の擬似距離誤差d6の最大値が所定値以上でない場合には、受信したGPS衛星1の擬似距離d8を全て測位使用衛星リストに記す。
なお、擬似距離d8の数が5つ以上であれば測位使用衛星リストに記したが、測位使用衛星リストに記すか否かを判定する擬似距離の数には別の数にしても良い。また、擬似距離誤差の最大値と比較する所定値も可変であるものとする。
また、擬似距離d8の数が5つ未満であるか、擬似距離d8の数が5つ以上でもこれらの擬似距離d8に対応するGPS衛星1の擬似距離誤差d6の最大値が所定値以上でない場合には、受信したGPS衛星1の擬似距離d8を全て測位使用衛星リストに記す。
なお、擬似距離d8の数が5つ以上であれば測位使用衛星リストに記したが、測位使用衛星リストに記すか否かを判定する擬似距離の数には別の数にしても良い。また、擬似距離誤差の最大値と比較する所定値も可変であるものとする。
次に測位計算を行なう。測位計算部324は、ステップST707にて、測位使用衛星リストのGPS衛星数が4つ以上であり、かつ収束計算回数が所定回数以内であれば、ステップST708にて測位計算処理を行う。反対に測位使用衛星リストのGPS衛星数が4つ未満、または収束計算回数が所定回数を超えた場合には、測位不可能として処理を終了する。
ステップST708の測位計算処理では、測位計算部324は、まず最初に測位使用衛星リストに基づいて以下の式(3)の航法行列Aを計算する。
ステップST708の測位計算処理では、測位計算部324は、まず最初に測位使用衛星リストに基づいて以下の式(3)の航法行列Aを計算する。

式(3)では、
LOSx=(xs−xo)/|||Ps−Po|||、
LOSy=(ys−yo)/|||Ps−Po|||、
LOSz=(zs−zo)/|||Ps−Po|||、
|||Ps−Po|||=
{(xs−xo)2+(ys−yo)2+(zs−zo)2}1/2
であり、Psは、式(1)と同様に、航法データから算出したGPS衛星の位置(xs、ys、zs)[m]、Poは車載装置3の位置(xo、yo、zo)[m]を示す。
LOSx=(xs−xo)/|||Ps−Po|||、
LOSy=(ys−yo)/|||Ps−Po|||、
LOSz=(zs−zo)/|||Ps−Po|||、
|||Ps−Po|||=
{(xs−xo)2+(ys−yo)2+(zs−zo)2}1/2
であり、Psは、式(1)と同様に、航法データから算出したGPS衛星の位置(xs、ys、zs)[m]、Poは車載装置3の位置(xo、yo、zo)[m]を示す。
式(3)の航法行列Aを計算した後に、車載装置3の位置誤差δPo(δxo、δyo、δzo)およびGPS受信機内蔵時計誤差δT3の4つの未知数を求め、求めた4つの未知数を元に、車載装置3の位置Poおよび時刻T3を修正する。このとき、測位計算部324は、擬似距離誤差の2乗和を最小にする解として、重み付き最小2乗法などの計算式を用いて4つの未知数を求める。
最後のステップST709では、車載装置3の位置誤差δPoが収束したか否かを判断する。収束した場合は、車載装置3の現在位置Poを測位できたとして処理を終了し、収束していない場合には、ステップST704からからステップST708を繰り返し実行する。一般的に、ステップST704からST708を数回繰り返して実行すれば、車載装置3の位置誤差δPoは収束するが、所定回数を繰り返しても収束しない場合には、ステップST707にて測位不可能と判断して処理を終了する。
図5に示すように、路側装置2は、既知である自らの設置位置とGPS衛星電波を受信して計算した自らの位置とを比較して、GPS衛星電波を用いて測位した場合のずれ、すなわち擬似距離の誤差d6を計算している。この擬似距離誤差d6は、電離層遅延誤差diono、対流圏遅延誤差dtropおよびマルチパス誤差dmpを含むものである。
一方、車載装置3のGPS衛星電波の受信状況は、路側装置2のGPS衛星電波の受信状況が同じであり、マルチパスの影響もほぼ同じと考えられる。したがって、車載装置3は、擬似距離を算出した際に路側装置2が計算した擬似距離誤差d6を用いて擬似距離を修正すれば、マルチパスdmpを含めた誤差を修正することができる。
一方、車載装置3のGPS衛星電波の受信状況は、路側装置2のGPS衛星電波の受信状況が同じであり、マルチパスの影響もほぼ同じと考えられる。したがって、車載装置3は、擬似距離を算出した際に路側装置2が計算した擬似距離誤差d6を用いて擬似距離を修正すれば、マルチパスdmpを含めた誤差を修正することができる。
以上のように、この実施の形態1によれば、路側装置2は、GPS衛星1毎に擬似距離誤差d6を補正データ5として算出でき、算出した補正データ5を送信できる。また、車載装置3は、道路の路側に設置された路側装置2が計算した擬似距離誤差d6を用いて、自らの擬似距離を修正して測位を行なう。擬似距離誤差d6にはマルチパスの影響も含まれているため、車載装置3はマルチパスの影響を考慮して現在位置を測位できる。
また、車載装置3はマルチパス誤差dmpを補正しながら現在位置を測位するので、路側装置2が車載装置3の現在位置に応じた情報提供および車載装置3の位置管理などを行うことができるほか、車載装置3を搭載した車の運転者が、車の現在位置を正確に知ることができ、正確な現在位置に基づいた経路案内を享受することができる。
また、車載装置3はマルチパス誤差dmpを補正しながら現在位置を測位するので、路側装置2が車載装置3の現在位置に応じた情報提供および車載装置3の位置管理などを行うことができるほか、車載装置3を搭載した車の運転者が、車の現在位置を正確に知ることができ、正確な現在位置に基づいた経路案内を享受することができる。
なお、上述の実施の形態1では、路側装置2は、複数のGPS衛星1の擬似距離d2の観測から路側装置2の時刻d4を求めていた。具体的には4つ以上のGPS衛星1の擬似距離d2を観測できれば路側装置2の時刻d4を計算することができたが、路側装置2の時刻d4を電波時計を用いて取得しても良い。
図8は、実施の形態1の別の形態における路側装置2および車載装置3の内部構造を示す図であり、図9は、実施の形態1の別の形態における路側装置2の制御部22の構成を示すブロック図である。図8および図9は、図2および図3に示す路側装置2に電波時計26を付加したものであり、図2および図3と同一の構成には同一の符号を付し、その説明は省略する。
図9における衛星位置制御部221は、擬似距離d2を元に時刻d4を計算するのではなく、電波時計26から時刻d4を取得し、電波時計26から入力された時刻d4に基づき衛星位置d5を計算して擬似距離誤差計算部222に出力する。
電波時計26を備えた場合、例えば、路側装置2が時刻d4を計算するために十分な数の擬似距離d2を観測できないときでも、電波時計26から時刻d4を取得できるために擬似距離誤差d6を計算できる。
図8は、実施の形態1の別の形態における路側装置2および車載装置3の内部構造を示す図であり、図9は、実施の形態1の別の形態における路側装置2の制御部22の構成を示すブロック図である。図8および図9は、図2および図3に示す路側装置2に電波時計26を付加したものであり、図2および図3と同一の構成には同一の符号を付し、その説明は省略する。
図9における衛星位置制御部221は、擬似距離d2を元に時刻d4を計算するのではなく、電波時計26から時刻d4を取得し、電波時計26から入力された時刻d4に基づき衛星位置d5を計算して擬似距離誤差計算部222に出力する。
電波時計26を備えた場合、例えば、路側装置2が時刻d4を計算するために十分な数の擬似距離d2を観測できないときでも、電波時計26から時刻d4を取得できるために擬似距離誤差d6を計算できる。
また、上述の実施の形態1では、4つの未知数を求めるために重み付き最小2乗法を用いたが、逐次計算やカルマンフィルタを用いて求めても良い。
また、路側装置2と車載装置3との通信に専用狭域通信(DSRC)を適用しても良い。この場合には、路側装置2としてDSRC路側装置を、車載装置3としてDSRC車載装置を用いることになる。
さらには、GPSだけでなくセンサや道路地図データを用いた測位およびマップマッチングを行う装置を用いても良い。
また、路側装置2と車載装置3との通信に専用狭域通信(DSRC)を適用しても良い。この場合には、路側装置2としてDSRC路側装置を、車載装置3としてDSRC車載装置を用いることになる。
さらには、GPSだけでなくセンサや道路地図データを用いた測位およびマップマッチングを行う装置を用いても良い。
実施の形態2.
実施の形態1では、路側装置2が計算した擬似距離誤差d6は、電離層遅延誤差diono、対流圏遅延誤差dtrop、およびマルチパス誤差dmpの合算値であったが、電離層遅延誤差diono、および対流圏遅延誤差dtropの値は、従来から計算可能であったDGPS補正データから取得しても良い。
実施の形態1では、路側装置2が計算した擬似距離誤差d6は、電離層遅延誤差diono、対流圏遅延誤差dtrop、およびマルチパス誤差dmpの合算値であったが、電離層遅延誤差diono、および対流圏遅延誤差dtropの値は、従来から計算可能であったDGPS補正データから取得しても良い。
図10は、この実施の形態2に係るDGPS測位システムを説明する構成図である。この実施の形態2に係るDGPS測位システムは、図1に示す実施の形態1に係るDGPS測位システムに加え、DGPS基地局6を備えたものである。なお、実施の形態2に係る図10から図13において、実施の形態1と同一の構成には同一の符号を付し、その説明は省略する。
図10におけるDGPS基地局6は、GPS衛星1a、1b、・・・、1nからの電波を受信するとともにDGPS補正データ7を送信する。DGPS補正データ7は、電離層遅延誤差dionoと対流圏遅延誤差dtropとの合算値である。
図10におけるDGPS基地局6は、GPS衛星1a、1b、・・・、1nからの電波を受信するとともにDGPS補正データ7を送信する。DGPS補正データ7は、電離層遅延誤差dionoと対流圏遅延誤差dtropとの合算値である。
図11は、路側装置2および車載装置3の内部構成を示す図である。
路側装置2は、図2に示す実施の形態1に係る路側装置2にDGPS補正データを取得するDGPS補正データ受信機25を付加したものである。DGPS補正データ受信機25は、DGPS基地局6が送信したDGPS補正データ7を受信して、制御部22に出力する。制御部22は、実施の形態1で示す方法で計算した擬似距離誤差d6からDGPS補正データ7を削除し、マルチパス誤差dmpのみ含む誤差データを測位補強データ5として車載装置3に送信する。
路側装置2は、図2に示す実施の形態1に係る路側装置2にDGPS補正データを取得するDGPS補正データ受信機25を付加したものである。DGPS補正データ受信機25は、DGPS基地局6が送信したDGPS補正データ7を受信して、制御部22に出力する。制御部22は、実施の形態1で示す方法で計算した擬似距離誤差d6からDGPS補正データ7を削除し、マルチパス誤差dmpのみ含む誤差データを測位補強データ5として車載装置3に送信する。
車載装置3は、図2に示す実施の形態1に係る車載装置3にDGPS補正データを取得するDGPS補正データ受信機35を付加したものである。DGPS補正データ受信機35は、DGPS基地局6が送信したDGPS補正データ7を受信して、制御部32に出力する。制御部32は、路側装置2から受信したマルチパス誤差dmpとDGPS補正データ7とから、測位処理を行う。
図12は、路側装置2の制御部22の構成を示すブロック図である。制御部22では、DGPS補正データ受信機25からのDGPS補正データ7が擬似距離誤差計算部222に入力される。
擬似距離誤差計算部222は、実施の形態1で説明したように、ここでは図示されない擬似距離誤差d6を計算する。さらに、DGPS補正データ7が入力されると、擬似距離誤差d6とDGPS補正データ7とからマルチパス誤差dmpを計算して、測位補強データ生成部223に出力する。
測位補強データ生成部223は、マルチパス誤差dmpを含んだ測位補強データ5を生成して通信機23に出力する。
擬似距離誤差計算部222は、実施の形態1で説明したように、ここでは図示されない擬似距離誤差d6を計算する。さらに、DGPS補正データ7が入力されると、擬似距離誤差d6とDGPS補正データ7とからマルチパス誤差dmpを計算して、測位補強データ生成部223に出力する。
測位補強データ生成部223は、マルチパス誤差dmpを含んだ測位補強データ5を生成して通信機23に出力する。
ところで、擬似距離誤差は電離層遅延誤差diono、対流圏遅延誤差dtrop、およびマルチパス誤差dmpの合算値であり、DGPS補正データ7は電離層遅延誤差diono、および対流圏遅延誤差dtropの合算値である。したがって、擬似距離誤差d6からDGPS補正データ7が示す誤差を削除すれば、具体的には差分を求めれば、マルチパス誤差dmpのみを得ることができる。なお、GPS受信機の雑音εは、式(1)および式(2)で別途検出しておく必要がある。
実施の形態1の制御部22は測位補強データ5に擬似距離誤差d6を設定していたが、上述のように、実施の形態2の制御部22は、測位補強データ5にマルチパス誤差dmpを設定する。
実施の形態1の制御部22は測位補強データ5に擬似距離誤差d6を設定していたが、上述のように、実施の形態2の制御部22は、測位補強データ5にマルチパス誤差dmpを設定する。
図13は、車載装置3の制御部32の構成を示すブロック図である。制御部32では、DGPS補正データ受信機35からのDGPS補正データ7が誤差計算部322に入力される。
また、測位補強データ解読部323は、測位補強データ5からマルチパス誤差dmpを抽出して誤差計算部322に出力する。
誤差計算部322は、GPS受信機31から入力された航法データd7からGPS衛星搭載時計誤差、電離層遅延誤差diono、対流圏遅延誤差dtropを所定の計算式で算出する。なお、DGPS補正データ受信機35からDGPS補正データ7が入力された場合には、GPS衛星搭載時計誤差のみ算出する。また、測位補強データ解読部323からマルチパス誤差dmpが入力されたとき、GPS衛星搭載時計誤差、DGPS補正データ7から取得した電離層遅延誤差dionoおよび対流圏遅延誤差dtrop、ならびに路側装置2から送信されたマルチパス誤差dmpの合算値を誤差データd13として測位計算部324に出力する。
測位計算部324は、誤差データd13を元に測位計算を行なう。
また、測位補強データ解読部323は、測位補強データ5からマルチパス誤差dmpを抽出して誤差計算部322に出力する。
誤差計算部322は、GPS受信機31から入力された航法データd7からGPS衛星搭載時計誤差、電離層遅延誤差diono、対流圏遅延誤差dtropを所定の計算式で算出する。なお、DGPS補正データ受信機35からDGPS補正データ7が入力された場合には、GPS衛星搭載時計誤差のみ算出する。また、測位補強データ解読部323からマルチパス誤差dmpが入力されたとき、GPS衛星搭載時計誤差、DGPS補正データ7から取得した電離層遅延誤差dionoおよび対流圏遅延誤差dtrop、ならびに路側装置2から送信されたマルチパス誤差dmpの合算値を誤差データd13として測位計算部324に出力する。
測位計算部324は、誤差データd13を元に測位計算を行なう。
以上のように、実施の形態2によれば、路側装置2がマルチパス誤差dmpを計算し、車載装置3は路側装置2からのマルチパス誤差dmpおよびDGPS基地局6からのDGPS補正データ7を用いて測位計算を行なうので、車載装置3は、マルチパス誤差dmpを補正できるとともに、DGPS補正データ7を利用して測位精度を向上することができる。
実施の形態3.
実施の形態1および実施の形態2では、車載装置3は1つの路側装置2から測位補強データ5を取得して測位計算をしていた。詳しくは、路側に路側装置2が設置された道路を走行する車載装置3が、所定の距離や通信の可否などで定められる路側装置2の所定の範囲内に位置する場合に、車載装置3が路側装置2と通信して測位補強データ5を取得していた。
この実施の形態3では、車載装置3が複数の測位補強データ5を利用して測位計算を行なうものである。
実施の形態1および実施の形態2では、車載装置3は1つの路側装置2から測位補強データ5を取得して測位計算をしていた。詳しくは、路側に路側装置2が設置された道路を走行する車載装置3が、所定の距離や通信の可否などで定められる路側装置2の所定の範囲内に位置する場合に、車載装置3が路側装置2と通信して測位補強データ5を取得していた。
この実施の形態3では、車載装置3が複数の測位補強データ5を利用して測位計算を行なうものである。
図14(a)は、この実施の形態3に係るDGPS測位システムを説明する構成図である。なお、実施の形態3に係る図14から図16において、実施の形態1と同一の構成には同一の符号を付し、その説明は省略する。
路側装置2aおよび2bは、実施の形態1に係る路側装置2に路側装置間通信機27を付加したものであり、道路沿いの既知座標に間欠的に設置されている。路側装置間は有線または無線通信で結ばれており、路側装置2aおよび2bは、路側装置間通信機27を用いて各路側装置2のデータを共有している。この路側装置2のデータとは、路側装置2が各自で計算したGPS衛星1の擬似距離誤差、および各自の設置座標である。車載装置3は、路側装置2aと2bとの間を走行している。
路側装置2aおよび2bは、実施の形態1に係る路側装置2に路側装置間通信機27を付加したものであり、道路沿いの既知座標に間欠的に設置されている。路側装置間は有線または無線通信で結ばれており、路側装置2aおよび2bは、路側装置間通信機27を用いて各路側装置2のデータを共有している。この路側装置2のデータとは、路側装置2が各自で計算したGPS衛星1の擬似距離誤差、および各自の設置座標である。車載装置3は、路側装置2aと2bとの間を走行している。
図15は、路側装置2の制御部22の構成を示すブロック図である。この実施の形態3に係る制御部22は、図3に示す実施の形態1に係る制御部22の擬似距離誤差計算部222に路側装置間通信機27が接続されたものである。
擬似距離誤差計算部222は、路側装置間通信機27を介して、第1の路側装置である自らが求めたデータd16を路側装置間通信機27に出力したり、路側装置間通信機27が受信した第2の路側装置である自分以外の路側装置が求めたデータd17を受信したりする。このように、路側装置2aおよび2bは、路側装置間通信機27によりデータd16およびd17を送受信してデータを共有する。
以降では、説明の便宜上、路側装置2aおよび2bがGPS衛星1aの電波を受信し、車載装置3がGPS衛星1aに関する擬似距離誤差を求める場合について説明する。また、路側装置2bが路側装置2aに路側装置2bのデータを送信するものとする。つまり、路側装置2bは図15においてデータd16を送信しており、路側装置2aは図15においてデータd17を受信している。
擬似距離誤差計算部222は、路側装置間通信機27を介して、第1の路側装置である自らが求めたデータd16を路側装置間通信機27に出力したり、路側装置間通信機27が受信した第2の路側装置である自分以外の路側装置が求めたデータd17を受信したりする。このように、路側装置2aおよび2bは、路側装置間通信機27によりデータd16およびd17を送受信してデータを共有する。
以降では、説明の便宜上、路側装置2aおよび2bがGPS衛星1aの電波を受信し、車載装置3がGPS衛星1aに関する擬似距離誤差を求める場合について説明する。また、路側装置2bが路側装置2aに路側装置2bのデータを送信するものとする。つまり、路側装置2bは図15においてデータd16を送信しており、路側装置2aは図15においてデータd17を受信している。
路側装置2aは、自ら検出したデータd16を測位補強データ5に付加して車載装置3に送信する際、路側装置間通信機27から受信した路側装置2bのデータd17も合わせて送信する。つまり、擬似距離誤差計算部222は、路側装置2a自らが算出した擬似距離誤差および設置座標、ならびに路側装置2bが算出した擬似距離誤差および設置座標を測位補強データ生成部223に出力する。
なお、路側装置2aのデータd16および路側装置2bのデータd17は、同一のGPS衛星に関して算出したものである。
なお、路側装置2aのデータd16および路側装置2bのデータd17は、同一のGPS衛星に関して算出したものである。
図16は、車載装置3の制御部32の構成を示すブロック図である。この実施の形態3に係る制御部32の誤差計算部322は、図4に示す実施の形態1に係る制御部32の誤差計算部322が補正データに含まれた複数の路側装置2の擬似距離誤差および路側装置2の設置位置と自らの位置とに基づいて自らの位置における擬似距離誤差を補間して計算する擬似距離誤差補間部322aを備えたものである。
擬似距離誤差補間部322aは、測位補強データ解読部323が測位補強データ5から抽出した路側装置2aおよび2bのデータd16およびd17を用いて、GPS衛星1aの擬似距離誤差を線形補間し、この擬似距離誤差とGPS衛星搭載時計誤差とから誤差データd13を生成する。
擬似距離誤差補間部322aは、測位補強データ解読部323が測位補強データ5から抽出した路側装置2aおよび2bのデータd16およびd17を用いて、GPS衛星1aの擬似距離誤差を線形補間し、この擬似距離誤差とGPS衛星搭載時計誤差とから誤差データd13を生成する。
図14(b)は、既知座標Paに設置された路側装置2aの擬似距離誤差δρaおよび既知座標Pbに設置された路側装置2bの擬似距離誤差δρbから、位置Poにおける車載装置3の擬似距離誤差δρoを線形補間して計算する方法を概念的に示したものである。図14(b)において、Pa、PoおよびPbから紙面上方に延びる矢印は、各位置における擬似距離誤差δρa、δρoおよびδρbを示す。擬似距離誤差δρoは、設置位置Paにおける擬似距離誤差δρaを基に、設置位置Paから設置位置Pbまでの擬似距離誤差の変化率、およびPaと車載装置3の現在位置Poとの距離を用いて計算でき、以下に詳説する。
Po(xo、yo)に設置された車載装置3の擬似距離誤差δρo[m]は、以下の式(4−1)から(4−3)で計算できる。
δρo=δρa+(δρb−δρa)/(yb−ya)×(yo−ya)
・・・式(4−1)
=δρa+(δρb−δρa)/(xb−xa)×(xo−xa)
・・・式(4−2)
=δρa+(δρb−δρa)/||Pa−Pb||×||Po−Pa||
・・・式(4−3)
δρo=δρa+(δρb−δρa)/(yb−ya)×(yo−ya)
・・・式(4−1)
=δρa+(δρb−δρa)/(xb−xa)×(xo−xa)
・・・式(4−2)
=δρa+(δρb−δρa)/||Pa−Pb||×||Po−Pa||
・・・式(4−3)
式(4−1)〜(4−3)における変数の定義を示す。
Pa:路側装置2aの設置位置(xa、ya)
Pb:路側装置2bの設置位置(xb、yb)
Po:車載装置3の現在位置(xo、yo)
δρa:路側装置2aが算出したGPS衛星1aの擬似距離誤差[m]
δρb:路側装置2bが算出したGPS衛星1aの擬似距離誤差[m]
δρo:車載装置3の現在位置PoにおけるGPS衛星1aの擬似距離誤差[m]
なお、位置Pa、PbおよびPoの成分(x、y)は経度および緯度を示す。
Pa:路側装置2aの設置位置(xa、ya)
Pb:路側装置2bの設置位置(xb、yb)
Po:車載装置3の現在位置(xo、yo)
δρa:路側装置2aが算出したGPS衛星1aの擬似距離誤差[m]
δρb:路側装置2bが算出したGPS衛星1aの擬似距離誤差[m]
δρo:車載装置3の現在位置PoにおけるGPS衛星1aの擬似距離誤差[m]
なお、位置Pa、PbおよびPoの成分(x、y)は経度および緯度を示す。
擬似距離誤差補間部322aは、車載装置3の擬似距離誤差δρoを計算する際、路側装置2aおよび2bの経度が同じで緯度が異なる場合、つまりya≠ybの場合には式(4−1)を使用し、路側装置2aおよび2bの緯度が同じで経度が異なる場合、つまりxa≠xbの場合には式(4−2)を使用する。
なお、路側装置2aおよび2bの経度も緯度も異なる場合でも、路側装置2aと2b間の距離||Pa−Pb||、および路側装置2aと車載装置3との距離||Po−Pa||を求めて、式(4−3)を使用することができる。
なお、路側装置2aおよび2bの経度も緯度も異なる場合でも、路側装置2aと2b間の距離||Pa−Pb||、および路側装置2aと車載装置3との距離||Po−Pa||を求めて、式(4−3)を使用することができる。
以上のように、実施の形態3によれば、車載装置3は、路側装置2の設置地点におけるマルチパス誤差だけでなく、路側装置2aと2b間の任意の位置におけるマルチパス誤差を推定して現在位置を計算できる。これにより、車載装置3が路側装置2の設置地点から進行方向に前後する区間に位置しても、測位精度の低下を抑制することができる。
ところで、上記の説明では、路側装置2aが路側装置2aおよび2bのデータを車載装置3に送信していたが、路側装置2bが路側装置2aおよび2bのデータを車載装置3に送信しても良い。
また、路側装置2aが路側装置のデータを車載装置3にまとめて送信し、路側装置2bは自らのデータを車載装置3に送らず、専ら路側装置2aに送信しても良い。この場合、路側装置2aは測位補強データ生成部223および通信機23を備える必要があるが、路側装置2bは、測位補強データ生成部223および通信機23を備える必要がない。
さらには、路側装置2aおよび2bは、自らのデータのみを車載装置3に送信し、車載装置3は、路側装置2aおよび2bのそれぞれから、それぞれのデータを取得しても良い。
また、路側装置2aが路側装置のデータを車載装置3にまとめて送信し、路側装置2bは自らのデータを車載装置3に送らず、専ら路側装置2aに送信しても良い。この場合、路側装置2aは測位補強データ生成部223および通信機23を備える必要があるが、路側装置2bは、測位補強データ生成部223および通信機23を備える必要がない。
さらには、路側装置2aおよび2bは、自らのデータのみを車載装置3に送信し、車載装置3は、路側装置2aおよび2bのそれぞれから、それぞれのデータを取得しても良い。
また、車載装置3の誤差計算部323は、式(4−1)〜(4−3)に示すように、路側装置2aの擬似距離誤差δρaを中心に擬似距離誤差δρoを計算していた。しかし、路側装置2bを中心にしてδρoを計算しても良い。この場合は、式(4−1)〜(4−3)の路側装置2aに関するデータと2bに関するデータとを入れ替えれば、路側装置2bを中心にした計算をすることができる。
また、誤差計算部323は、路側装置2aおよび2bから取得した擬似距離誤差δρaおよびδρbを線形補間に用いて、車載装置3の位置Poにおける擬似距離誤差δρoを計算する替わりに、路側装置2aおよび2bからマルチパス誤差dmpを取得して、これらのマルチパス誤差を線形補間に用いて、車載装置の位置Poにおけるマルチパス誤差dmpを計算しても良い。
この場合には、まず、路側装置2aおよび2bが実施の形態2の路側装置2のようにDGPS補正データ7からマルチパス誤差を計算し、車載装置3に送信する。次に車載装置3は、式(4−1)〜(4−3)において、各位置PaおよびPbにおける擬似距離誤差の替わりにマルチパス誤差を代入して、車載装置3の位置Poにおけるマルチパス誤差を計算する。
さらに、車載装置3は、実施の形態2の誤差計算部323のように、計算したマルチパス誤差と、DGPS補正データ7から取得した誤差とGPS搭載時計誤差とから誤差データd13を計算する。
このようにすれば、路側装置2間に位置する車載装置3は、DGPS補正データと線形補間したマルチパス誤差とを用いて測位計算することができる。
この場合には、まず、路側装置2aおよび2bが実施の形態2の路側装置2のようにDGPS補正データ7からマルチパス誤差を計算し、車載装置3に送信する。次に車載装置3は、式(4−1)〜(4−3)において、各位置PaおよびPbにおける擬似距離誤差の替わりにマルチパス誤差を代入して、車載装置3の位置Poにおけるマルチパス誤差を計算する。
さらに、車載装置3は、実施の形態2の誤差計算部323のように、計算したマルチパス誤差と、DGPS補正データ7から取得した誤差とGPS搭載時計誤差とから誤差データd13を計算する。
このようにすれば、路側装置2間に位置する車載装置3は、DGPS補正データと線形補間したマルチパス誤差とを用いて測位計算することができる。
実施の形態4.
実施の形態3では、路側装置2aおよび2bが道路の路側に道路の進行方向に間欠的に設置されており、車載装置3は、自らの進行方向の前後に位置する路側装置2aおよび2bのデータを用いて擬似距離誤差を計算していた。この実施の形態4では、路側装置2aおよび2bを道路の両側に設置する。
実施の形態3では、路側装置2aおよび2bが道路の路側に道路の進行方向に間欠的に設置されており、車載装置3は、自らの進行方向の前後に位置する路側装置2aおよび2bのデータを用いて擬似距離誤差を計算していた。この実施の形態4では、路側装置2aおよび2bを道路の両側に設置する。
図17(a)は、この実施の形態4に係るDGPS測位システムを説明する構成図である。図中において、実施の形態3と同一の構成には同一の符号を付し、その説明は省略する。図17(a)は、路側装置2aおよび2bが設置された道路の横断方向の断面図である。道路の両側に建物が建っている場合、または片方のみに立っている場合には、道路の横断方向の位置によって、GPS衛星1aの電波状況が異なる可能性がある。車載装置3における電波状況も、路側装置2aおよび2bとは異なる可能性があるため、横断方向において、路側装置2aおよび2bの設置位置と擬似距離誤差とから、車載装置3の擬似距離誤差を線形補間して計算する。
路側装置2aおよび2b、ならびに車載装置3の動作は実施の形態3と同じである。図17(b)は、既知座標Paに設置された路側装置2aの擬似距離誤差δρaおよび既知座標Pbに設置された路側装置2bの擬似距離誤差δρbから、位置Poにおける車載装置3の擬似距離誤差δρoを線形補間して計算する方法を概念的に示したものであり、図14(b)と同じである。ただし、実施の形態3において計算した擬似距離誤差δρoは、車載装置3が搭載された車輌の進行方向による変化を考慮して計算されたものであるのに対し、この実施の形態4において計算した擬似距離誤差δρoは、擬似距離誤差の道路の横断方向における変化を考慮したものである。
実施の形態4では、車載装置3が、路側装置2aや2bが設置されている道路脇からの道路の横断方向における距離に応じて、擬似距離誤差δρoを式(4−1)〜(4−3)で線形補間して推定し測位計算に用いる。したがって、道路の横方向の違いによる車載装置3の測位精度の差を小さくすることができる。例えば、幅の大きな道路や路線の数の多い道路の場合、車載装置3が中央分離帯近くに位置すれば、道路横方向に路側装置2aや2bから遠くなる。しかし、この実施の形態4のように道路横断方向におけるGPS衛星電波の受信状況の変化に応じた擬似距離誤差を求めることで、測位計算の精度を保つことができる。
実施の形態5.
実施の形態3あるいは実施の形態4では、路側装置2aおよび2bは、道路沿いあるいは道路の両側に間欠的に設置され、擬似距離誤差補間部322aは、路側装置2aおよび2bのデータから線形補間して擬似距離誤差δρoを計算していた。この実施の形態5では、複数の路側装置を道路沿いおよび道路の両側に間欠的に設置するものである。
実施の形態3あるいは実施の形態4では、路側装置2aおよび2bは、道路沿いあるいは道路の両側に間欠的に設置され、擬似距離誤差補間部322aは、路側装置2aおよび2bのデータから線形補間して擬似距離誤差δρoを計算していた。この実施の形態5では、複数の路側装置を道路沿いおよび道路の両側に間欠的に設置するものである。
図18は、この実施の形態5に係るDGPS測位システムを説明する構成図である。図18において、車載装置3が走行する道路沿いの座標Pa、Pb、Pc、Pd、PeおよびPfに、路側装置2a、2b、2c、2d、2eおよび2fが設置されている。なお、図中において、実施の形態3と同一の構成には同一の符号を付し、その説明は省略する。路側装置2a、2bおよび2c、ならびに2d、2eおよび2fは、道路の方向に対して間欠的に設置されている。また、路側装置2aおよび2d、2bおよび2e、2cおよび2fは、道路を挟んで対向して設置されている。なお、車載装置3は道路上の位置Poに位置する。
この実施の形態5では、車載装置3は、少なくとも3つ以上の路側装置のデータを用いて擬似距離誤差δρoを計算するものである。ここでは、路側装置2a、2bおよび2dのデータを用いて擬似距離誤差δρoを計算する場合を考える。なお、後述する図19が示すように、車載装置3は、路側装置2a、2bおよび2dの設置位置Pa、PbおよびPdをコーナーとする面内に位置している。
車載装置3は、路側装置2a、2b、・・・2fのデータを取得する。それぞれのデータは、1つの路側装置からまとめて送信される。なお、車載装置3は、各路側装置と通信してそれぞれのデータを取得しても良く、全路側装置のうちのいくつかの路側装置が複数の路側装置のデータをまとめて送信しても良い。
また、車載装置3は、取得した路側装置のデータから、少なくとも3つのデータを選択する。なお、車載装置3は、全ての路側装置のデータから使用するデータを選択しても良いが、使用するデータのみを当該路側装置から取得しても良い。
また、車載装置3は、取得した路側装置のデータから、少なくとも3つのデータを選択する。なお、車載装置3は、全ての路側装置のデータから使用するデータを選択しても良いが、使用するデータのみを当該路側装置から取得しても良い。
なお、車載装置3が路側装置2のデータから求めた擬似距離誤差から誤差データd13を生成する処理は、実施の形態3にて説明した方法と同様である。以降では、車載装置3の擬似距離誤差補間部322aが複数の路側装置2のデータから面補間をして車載装置3における擬似距離誤差を計算する方法について説明する。
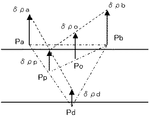
図19は、擬似距離誤差補間部322aが、取得した上記のデータから面補間をして擬似距離誤差δρoを計算する方法を説明する図である。擬似距離誤差補間部322aは、第一に、PaおよびPdを結ぶ直線とPbおよびPoを結ぶ直線の交点となる位置Ppを計算する。なお、Ppの位置は、Pa等と同じく経度xpおよび緯度ypで表す。
第二に、Pa、δρa、Pdおよびδρdを用いて線形補間によりPpにおける擬似距離誤差δρpを計算する。
第三に、Pb、δρb、Ppおよびδρpを用いて線形補間によりPoにおける擬似距離誤差δρoを計算する。
各計算手順を以下に詳説する。
第二に、Pa、δρa、Pdおよびδρdを用いて線形補間によりPpにおける擬似距離誤差δρpを計算する。
第三に、Pb、δρb、Ppおよびδρpを用いて線形補間によりPoにおける擬似距離誤差δρoを計算する。
各計算手順を以下に詳説する。
第一に、位置Ppを、以下の式(5−1)〜(5−4)を用いて計算する。
xp={(ya−yo)+(yb−yo)/(xb−xo)×xo
−(yd−ya)/(xd−xa)×xa}
/{(yb−yo)/(xb−xo)−(yd−ya)/(xd−xa)}
・・・式(5−1)
xp=xa ・・・式(5−2)
yp=(yd−ya)/(xd−xa)×(xp−xa)+ya ・・・式(5−3)
yp=(yb−yo)/(xb−xo)×(xp−xo)+yo ・・・式(5−4)
xp={(ya−yo)+(yb−yo)/(xb−xo)×xo
−(yd−ya)/(xd−xa)×xa}
/{(yb−yo)/(xb−xo)−(yd−ya)/(xd−xa)}
・・・式(5−1)
xp=xa ・・・式(5−2)
yp=(yd−ya)/(xd−xa)×(xp−xa)+ya ・・・式(5−3)
yp=(yb−yo)/(xb−xo)×(xp−xo)+yo ・・・式(5−4)
擬似距離誤差補間部322aは、Ppの経度xpを計算する際、路側装置2aおよび2dの経度が異なる場合、つまりxa≠xdの場合に式(5−1)を使用し、路側装置2aおよび2dの経度が同じ場合、つまりxa=xdの場合に式(5−2)を使用する。
また、Ppの緯度ypを計算する際、路側装置2aおよび2dの経度が異なる場合、つまりxa≠xdの場合に式(5−3)を使用し、路側装置2bの経度と車載装置3の経度が異なる場合、つまりxb≠xoの場合に式(5−4)を使用する。
また、Ppの緯度ypを計算する際、路側装置2aおよび2dの経度が異なる場合、つまりxa≠xdの場合に式(5−3)を使用し、路側装置2bの経度と車載装置3の経度が異なる場合、つまりxb≠xoの場合に式(5−4)を使用する。
第二に、上記の式(5−1)〜(5−4)から求めた交点の座標Pp(xp、yp)における擬似距離誤差δρpを、式(4−1)〜(4−3)で示す方法と同様の方法で計算する。なお、ここでは、式(4−1)〜(4−3)のPa、δρa、Pb、δρbおよびPc、δρcの替わりに、それぞれPa、δρa、Pd、δρd、Ppおよびδρpを適用する。
第三に、Poにおける擬似距離誤差δρoを、式(4−1)〜(4−3)で示す方法と同様の方法で計算する。ここでは、式(4−1)〜(4−3)のPa、δρa、Pb、δρb、Pcおよびδρcの替わりに、それぞれPb、δρb、Pp、δρp、Poおよびδρoを適用する。
上記第2の手順および第3の手順に示すように、擬似距離誤差補間部322aは線形補間を繰り返すことで面補間を行なうことができ、面補間により路側装置2a、2bおよび2dを結ぶ面に位置する車載装置3における擬似距離誤差δρoを計算することができる。
なお、図19では、車載装置3が3つの路側装置2a、2bおよび2dを頂点とする三角形の面の内側に位置していたが、車載装置3が三角形の面の外側に位置する場合でも、図20に示すように、車載装置3が3つの路側装置2a、2bおよび2dが辺上に位置する点線で示す長方形の内側に位置すれば、上記第1〜第2の手順を用いて車載装置3におけるδρoを計算することができる。
また、3つの路側装置のデータから面補間をして車載装置3の擬似距離誤差δρoを計算する替わりに、その他の計算方法で車載装置3の現在位置での擬似距離誤差δρoを計算しても良い。
また、3つの路側装置のデータから面補間をして車載装置3の擬似距離誤差δρoを計算する替わりに、その他の計算方法で車載装置3の現在位置での擬似距離誤差δρoを計算しても良い。
以上のように、この実施の形態5によれば、擬似距離誤差補間部322aが道路の進行方向および横断方向に位置する3つ以上の路側装置のデータから面補間をして、車載装置3の現在位置における擬似距離誤差を計算するので、車載装置3の道路横断方向の位置および進行方向の位置に応じてマルチパス誤差が変化する場合でも、車載装置3の路側装置2との位置関係に応じた擬似距離誤差の補正をすることができ、車載装置3の測位精度の差を小さくすることができる。
実施の形態6.
実施の形態1から5では、車載装置3が各GPS衛星1の擬似距離を計算し、これらの擬似距離から測位計算を行なう際に、電離層遅延誤差diono、対流圏遅延誤差dtrop、マルチパス誤差dmpなどの誤差データを路側装置2やDGPS基地局6から取得して、この誤差データを用いて測位計算の精度を上げていた。
この実施の形態6では、誤差データで測位計算を修正する替わりに、車載装置3自らが計算した擬似距離の変化率を用いて擬似距離を修正したり、路側装置2の擬似距離変化率を用いて測位計算に使用するGPS衛星を選択したりすることで、測位計算の精度を上げるものである。擬似距離変化率はGPS衛星電波の搬送波周波数偏位から検出するものであり、GPS衛星電波の伝播遅延時間から求める擬似距離よりも、マルチパスの影響が小さくなる。
実施の形態1から5では、車載装置3が各GPS衛星1の擬似距離を計算し、これらの擬似距離から測位計算を行なう際に、電離層遅延誤差diono、対流圏遅延誤差dtrop、マルチパス誤差dmpなどの誤差データを路側装置2やDGPS基地局6から取得して、この誤差データを用いて測位計算の精度を上げていた。
この実施の形態6では、誤差データで測位計算を修正する替わりに、車載装置3自らが計算した擬似距離の変化率を用いて擬似距離を修正したり、路側装置2の擬似距離変化率を用いて測位計算に使用するGPS衛星を選択したりすることで、測位計算の精度を上げるものである。擬似距離変化率はGPS衛星電波の搬送波周波数偏位から検出するものであり、GPS衛星電波の伝播遅延時間から求める擬似距離よりも、マルチパスの影響が小さくなる。
実施の形態6におけるDGPS測位システムは、実施の形態1におけるDGPS測位システムと同様であり、当該システムを構成する路側装置2および車載装置3の構成や機能も、実施の形態1における路側装置2および車載装置3とほぼ同様である。この実施の形態6において、実施の形態1を示す図1から図7と同一の機能や動作についてはその説明を省略し、同一の構成には同一の符号を付す。
最初に、車載装置3が行なう擬似距離変化率を用いた測位計算について説明する。
図21は、車載装置3の制御部32の構成を示すブロック図である。この実施の形態6に係る車載装置3は、図4に示す実施の形態1に係る制御部32の測位計算部324が擬似距離変化率計算部324aを備えたものである。擬似距離変化率計算部324aは、GPS衛星1の位置および速度、ならびに自らの位置および速度から擬似距離d8の変化率である擬似距離変化率を求める。
また、測位補強データ解読部323は、測位補強データ5から路側装置2の擬似距離誤差d6を解読する替わりに、路側装置2の擬似距離変化率d18を解読し、測位計算部324に出力するものである。また、誤差計算部322は、航法データd7からのみ誤差データd13を生成するものである。
さらに、測位計算部324は、擬似距離変化率計算部324aが計算した擬似距離変化率を用いて測位計算を行なうとともに、路側装置2の擬似距離変化率を用いて測位計算の校正をするものである。
図21は、車載装置3の制御部32の構成を示すブロック図である。この実施の形態6に係る車載装置3は、図4に示す実施の形態1に係る制御部32の測位計算部324が擬似距離変化率計算部324aを備えたものである。擬似距離変化率計算部324aは、GPS衛星1の位置および速度、ならびに自らの位置および速度から擬似距離d8の変化率である擬似距離変化率を求める。
また、測位補強データ解読部323は、測位補強データ5から路側装置2の擬似距離誤差d6を解読する替わりに、路側装置2の擬似距離変化率d18を解読し、測位計算部324に出力するものである。また、誤差計算部322は、航法データd7からのみ誤差データd13を生成するものである。
さらに、測位計算部324は、擬似距離変化率計算部324aが計算した擬似距離変化率を用いて測位計算を行なうとともに、路側装置2の擬似距離変化率を用いて測位計算の校正をするものである。
最初に、車載装置3が自らが測定した擬似距離変化率を用いて測位計算を行なう場合について説明する。まず、擬似距離変化率計算部324aが後述の式(6)を用いて各GPS衛星1との擬似距離変化率の予測値Δρrate-siを計算する。次に、測位計算部324が後述の式(7)を用いて擬似距離変化率の予測値Δρrate-siから車載装置3の速度Voiおよび車載装置3の位置Poiを計算する。
Δρrate-si=LOSx×vxsi+LOSy×vysi+LOSz×vzsi
・・・式(6)
LOSx=(xsi−xoi)/||Psi−Poi||
LOSy=(ysi−yoi)/||Psi−Poi||
LOSz=(zsi−zoi)/||Psi−Poi||
||Psi−Poi||={(xsi−xoi)2+(ysi−yoi)2
+(zsi−zoi)2}1/2
・・・式(6)
LOSx=(xsi−xoi)/||Psi−Poi||
LOSy=(ysi−yoi)/||Psi−Poi||
LOSz=(zsi−zoi)/||Psi−Poi||
||Psi−Poi||={(xsi−xoi)2+(ysi−yoi)2
+(zsi−zoi)2}1/2
Poi=Poi-1+Voi×Δt ・・・式(7)
なお、上記式(6)および式(7)における変数は以下の通りである。
Psi:航法データから算出したGPS衛星の位置(xsi、ysi、zsi)[m]
Vsi:航法データから算出したGPS衛星の速度
(vxsi、vysi、vzsi)[m/s]
Poi:車載装置3の位置(xoi、yoi、zoi)[m]
Voi:車載装置3の速度(vxoi、vyoi、vzoi)[m/s]
Δρrate-si:車載装置3の擬似距離変化率の予測値[m/s]
Δρratei:車載装置3の擬似距離変化率の計測値[m/s]
A:航法行列
Psi:航法データから算出したGPS衛星の位置(xsi、ysi、zsi)[m]
Vsi:航法データから算出したGPS衛星の速度
(vxsi、vysi、vzsi)[m/s]
Poi:車載装置3の位置(xoi、yoi、zoi)[m]
Voi:車載装置3の速度(vxoi、vyoi、vzoi)[m/s]
Δρrate-si:車載装置3の擬似距離変化率の予測値[m/s]
Δρratei:車載装置3の擬似距離変化率の計測値[m/s]
A:航法行列
次に、車載装置3が、路側装置2の擬似距離変化率に関するデータも用いて測位計算する場合について説明する。
車載装置2が停車状態にあれば、車載装置3で受信したGPS衛星毎の擬似距離の予測値Δρrate-siと計測値Δρrateiはほぼ一致する。しかし、車載装置3が走行状態にあれば、GPS衛星と車載装置3の相対運動が変化するため、計測値Δρrateiと予測値Δρrate-siに差異が生じる。
また、大きなマルチパスが生じる地上環境で、GPS衛星電波の強度が低くなると、車載装置3で計測した擬似距離変化率の誤差が大きくなる可能性があり、式(6)や式(7)による測位計算に誤差が生じるおそれがある。車載装置3の位置が正確であれば、擬似距離変化率の計測値と予測値とを比較することで擬似距離変化率の誤差を推定することもできるが、十分でない。
車載装置2が停車状態にあれば、車載装置3で受信したGPS衛星毎の擬似距離の予測値Δρrate-siと計測値Δρrateiはほぼ一致する。しかし、車載装置3が走行状態にあれば、GPS衛星と車載装置3の相対運動が変化するため、計測値Δρrateiと予測値Δρrate-siに差異が生じる。
また、大きなマルチパスが生じる地上環境で、GPS衛星電波の強度が低くなると、車載装置3で計測した擬似距離変化率の誤差が大きくなる可能性があり、式(6)や式(7)による測位計算に誤差が生じるおそれがある。車載装置3の位置が正確であれば、擬似距離変化率の計測値と予測値とを比較することで擬似距離変化率の誤差を推定することもできるが、十分でない。
そこで、路側装置2における擬似距離変化率の予測値および計測値を比較して、擬似距離変化率の誤差が大きい場合には、当該GPS衛星の電波を用いない場合を考える。
図22は、路側装置2の制御部22の構成を示すブロック図である。なお、この実施の形態6に係る路側装置2は、図3に示す実施の形態1に係る制御部22の擬似距離誤差計算部222を擬似距離変化率計算部224に置き換えたものである。擬似距離変化率計算部224は、航法データd1に基づき計算したGPS衛星1の位置と路側装置2の設置位置との間の直線距離、および航法データd1から求めたGPS衛星1の速度に基づき擬似距離の変化率である擬似距離変化率の予測値および計測値を求め、この予測値および計測値を路側装置2の擬似距離変化率データd18として測位補強データ生成部に出力する。
図22は、路側装置2の制御部22の構成を示すブロック図である。なお、この実施の形態6に係る路側装置2は、図3に示す実施の形態1に係る制御部22の擬似距離誤差計算部222を擬似距離変化率計算部224に置き換えたものである。擬似距離変化率計算部224は、航法データd1に基づき計算したGPS衛星1の位置と路側装置2の設置位置との間の直線距離、および航法データd1から求めたGPS衛星1の速度に基づき擬似距離の変化率である擬似距離変化率の予測値および計測値を求め、この予測値および計測値を路側装置2の擬似距離変化率データd18として測位補強データ生成部に出力する。
擬似距離変化率計算部224は、以下の式(8)を用いて各GPS衛星1の擬似距離変化率の予測値Δρrate-siを計算し、さらに当該GPS衛星の速度Vsiから、擬似距離変化率の計測値を求める。
Δρrate-si=LOSx×vxsi+LOSy×vysi+LOSz×vzsi
・・・式(8)
LOSx=(xsi−xa)/||Psi−Pa||
LOSy=(ysi−ya)/||Psi−Pa||
LOSz=(zsi−za)/||Psi−Pa||
||Psi−Pa||={(xsi−xa)2+(ysi−ya)2
+(zsi−za)2}1/2
・・・式(8)
LOSx=(xsi−xa)/||Psi−Pa||
LOSy=(ysi−ya)/||Psi−Pa||
LOSz=(zsi−za)/||Psi−Pa||
||Psi−Pa||={(xsi−xa)2+(ysi−ya)2
+(zsi−za)2}1/2
なお、上記式(8)における変数は以下の通りである。
Psi:航法データから算出したGPS衛星の位置(xsi、ysi、zsi)[m]
Vsi:航法データから算出したGPS衛星の速度
(vxsi、vysi、vzsi)[m/s]
Pa:路側装置2のGPS受信機21のアンテナ座標の位置
(xa、ya、za)[m]
||Psi−Pa||=GPS衛星位置Psiと路側装置2との間の距離[m]
Δρrate-si:路側装置2の擬似距離変化率の予測値[m/s]
Psi:航法データから算出したGPS衛星の位置(xsi、ysi、zsi)[m]
Vsi:航法データから算出したGPS衛星の速度
(vxsi、vysi、vzsi)[m/s]
Pa:路側装置2のGPS受信機21のアンテナ座標の位置
(xa、ya、za)[m]
||Psi−Pa||=GPS衛星位置Psiと路側装置2との間の距離[m]
Δρrate-si:路側装置2の擬似距離変化率の予測値[m/s]
車載装置3の通信機33が路側装置2の擬似距離変化率のデータd18が設定された測位補強データ5を受信すると、路側装置2の擬似距離変化率のデータd18は、測位補強データ解読部323を介して測位計算部324に入力される。
測位計算部324は、データd18に設定された路側装置2の擬似距離変化率に関する計測値と予測値とを比較し、この計測値と予測値との差分が所定値よりも大きい場合には、車載装置3で計測した当該GPS衛星の擬似距離変化率に誤差が生じるものとして、測位計算に当該GPS衛星の擬似距離変化率を用いない。
また、測位計算部324は、路側装置2からは擬似距離変化率の予測値のみを受信して、路側装置2の擬似距離変化率の予測値と車載装置3自らの擬似距離変化率の計測値とを比較して、当該GPS衛星の擬似距離を用いるか否かを判断しても良い。例えば、路側装置2から入手した擬似距離変化率の予測値と車載装置3が計測した擬似距離変化率の計測値の差分が大きな場合には、車載装置3が当該GPS衛星の擬似距離を測位計算に用いないと判断するなどである。
測位計算部324は、データd18に設定された路側装置2の擬似距離変化率に関する計測値と予測値とを比較し、この計測値と予測値との差分が所定値よりも大きい場合には、車載装置3で計測した当該GPS衛星の擬似距離変化率に誤差が生じるものとして、測位計算に当該GPS衛星の擬似距離変化率を用いない。
また、測位計算部324は、路側装置2からは擬似距離変化率の予測値のみを受信して、路側装置2の擬似距離変化率の予測値と車載装置3自らの擬似距離変化率の計測値とを比較して、当該GPS衛星の擬似距離を用いるか否かを判断しても良い。例えば、路側装置2から入手した擬似距離変化率の予測値と車載装置3が計測した擬似距離変化率の計測値の差分が大きな場合には、車載装置3が当該GPS衛星の擬似距離を測位計算に用いないと判断するなどである。
以上のように、実施の形態6によれば、路側装置2は、GPS衛星1毎に、GPS衛星1と路側装置2との相対運動に基づく擬似距離変化率を補正データ5として算出でき、算出した補正データ5を車載装置3に送信できる。また、車載装置3が擬似距離変化率の計測値と予測値を用いて計算した現在位置を修正計算するので、マルチパスの影響を小さくして測位計算を行なうことができる。
また、擬似距離率は路側装置2とGPS衛星1との相対運動、および車載装置3とGPS衛星1との相対運動に基づくので、車載装置3が搭載された車輌の移動速度や移動方位等、利用者の挙動を考慮したGPS測位を実現できる。
さらに、当該GPS衛星1の擬似距離を測位計算に用いるか否かの判断や擬似距離変化率を用いての測位計算の校正に、路側装置2が計算した擬似距離変化率の計測値や予測値を参照するので、精度の良い測位計算を行なうことができる。
また、擬似距離率は路側装置2とGPS衛星1との相対運動、および車載装置3とGPS衛星1との相対運動に基づくので、車載装置3が搭載された車輌の移動速度や移動方位等、利用者の挙動を考慮したGPS測位を実現できる。
さらに、当該GPS衛星1の擬似距離を測位計算に用いるか否かの判断や擬似距離変化率を用いての測位計算の校正に、路側装置2が計算した擬似距離変化率の計測値や予測値を参照するので、精度の良い測位計算を行なうことができる。
実施の形態7.
実施の形態1では、路側装置2が所定時刻において検出したGPS衛星1の擬似距離誤差を車載装置3に送信していた。この実施の形態7では、路側装置2が擬似距離誤差の統計量を計算し、車載装置3がその統計量に基づき測位使用衛星の選択を判断するものである。
なお、この実施の形態7における路側装置2および車載装置3は、実施の形態1や2における路側装置および車載装置3と同一の構成要素を有し、その説明を省略する。また、実施の形態1を示す図1から図4と同一の構成には同一の符号を付す。
実施の形態1では、路側装置2が所定時刻において検出したGPS衛星1の擬似距離誤差を車載装置3に送信していた。この実施の形態7では、路側装置2が擬似距離誤差の統計量を計算し、車載装置3がその統計量に基づき測位使用衛星の選択を判断するものである。
なお、この実施の形態7における路側装置2および車載装置3は、実施の形態1や2における路側装置および車載装置3と同一の構成要素を有し、その説明を省略する。また、実施の形態1を示す図1から図4と同一の構成には同一の符号を付す。
図23は、路側装置2の制御部22の構成を示すブロック図である。この実施の形態7に係る制御部22は、図3に示す実施の形態1の制御部22の擬似距離誤差計算部222が擬似距離誤差の統計量を計算する統計量計算部222aを備えたものである。
GPS衛星1は、その位置(方位角、仰角)が時々刻々変化するものであり、擬似距離誤差計算部222がGPS衛星1a、1b、・・・1nの位置の変化に伴い擬似距離誤差を算出する際、統計量計算部222aは、擬似距離誤差の統計量(分散、平均、最大、最小など)を取得する。擬似距離誤差計算部222は、擬似距離誤差d6とともに統計量d19を測位補強データ生成部223に出力する。これにより、通信機23は、車載装置3に擬似距離誤差d6を送信する際、合わせて擬似距離誤差の統計量d19も送信する。
GPS衛星1は、その位置(方位角、仰角)が時々刻々変化するものであり、擬似距離誤差計算部222がGPS衛星1a、1b、・・・1nの位置の変化に伴い擬似距離誤差を算出する際、統計量計算部222aは、擬似距離誤差の統計量(分散、平均、最大、最小など)を取得する。擬似距離誤差計算部222は、擬似距離誤差d6とともに統計量d19を測位補強データ生成部223に出力する。これにより、通信機23は、車載装置3に擬似距離誤差d6を送信する際、合わせて擬似距離誤差の統計量d19も送信する。
図24は、車載装置3の制御部32に構成を示すブロック図である。この実施の形態7に係る制御部32は、図4に示す実施の形態1の制御部32が、統計量d19に基づき測位計算するものである。
図24において、測位補強データ解読部323は、測位補強データ5から擬似距離誤差d6および擬似距離誤差の統計量d19を抽出すると、擬似距離誤差d6を誤差計算部322に出力し、擬似距離誤差の統計量d19を測位計算部324に出力する。
その後、測位計算部324は、擬似距離誤差の統計量d19を取得すると、当該GPS衛星を測位計算に用いるか否かを判断する。例えば、擬似距離誤差の分散が所定値よりも大きな場合には、当該GPS衛星を測位使用衛星リストへの記載からはずす。その他、最大値が所定値よりも大きな場合や、最大値と最小値との差分が所定値よりも大きな場合などに、当該GPS衛星を測位使用衛星リストへの記載からはずしても良い。このようにすると、擬似距離誤差の変動が大きなGPS衛星を測位計算に使用されるGPS衛星候補からはずすことができ、車載装置3における測位計算の精度を上げることができる。
図24において、測位補強データ解読部323は、測位補強データ5から擬似距離誤差d6および擬似距離誤差の統計量d19を抽出すると、擬似距離誤差d6を誤差計算部322に出力し、擬似距離誤差の統計量d19を測位計算部324に出力する。
その後、測位計算部324は、擬似距離誤差の統計量d19を取得すると、当該GPS衛星を測位計算に用いるか否かを判断する。例えば、擬似距離誤差の分散が所定値よりも大きな場合には、当該GPS衛星を測位使用衛星リストへの記載からはずす。その他、最大値が所定値よりも大きな場合や、最大値と最小値との差分が所定値よりも大きな場合などに、当該GPS衛星を測位使用衛星リストへの記載からはずしても良い。このようにすると、擬似距離誤差の変動が大きなGPS衛星を測位計算に使用されるGPS衛星候補からはずすことができ、車載装置3における測位計算の精度を上げることができる。
また、測位計算部324は、上記のように擬似距離誤差の統計量d19を用いて当該GPS衛星の測位使用の候補からはずすほか、統計量のうちの分散を用いて、重み付き最小二乗法から車載装置3の位置Poを計算することができる。この方法によりPoは、以下の式(9)で求める。
Poi=Poi-1+ΔPoi ・・・式(9)
ΔPoi=(ATWA)−1(ATW)ΔRoi
LOSxn=(Pxsin−Poxi)/||Psin−Poi||
LOSyn=(Pysin−Poyi)/||Psin−Poi||
LOSzn=(Pzsin−Pozi)/||Psin−Poi||
||Psin−Poi||={(Pxsin−Poxi)2
+(Pysin−Poyi)2+(Pzsin−Pozi)2}1/2
ΔPoi=(ATWA)−1(ATW)ΔRoi
LOSyn=(Pysin−Poyi)/||Psin−Poi||
LOSzn=(Pzsin−Pozi)/||Psin−Poi||
||Psin−Poi||={(Pxsin−Poxi)2
+(Pysin−Poyi)2+(Pzsin−Pozi)2}1/2
上記式(8)において、
Psi:航法データから算出したGPS衛星の位置(Psi、Psi、Psi)[m]
Po:車載装置3の位置(xo、yo、zo)[m]
ΔPo:車載装置3の位置の修正量(Δxo、Δyo、Δzo)[m]
ΔRo:移動体の擬似距離の差異
WA:衛星毎の重み付き
A:航法行列
LOS:車載装置3から衛星に対する視線方向ベクトルのX,Y,Z成分
ρcτ:車載装置3で受信した擬似距離[m]
dρ:GPS衛星1と車載装置3との間の擬似距離誤差
(=diono+dtrop+dmp)[m]
ε:車載装置3の雑音[m]
σδρ:擬似距離の誤差分散
Psi:航法データから算出したGPS衛星の位置(Psi、Psi、Psi)[m]
Po:車載装置3の位置(xo、yo、zo)[m]
ΔPo:車載装置3の位置の修正量(Δxo、Δyo、Δzo)[m]
ΔRo:移動体の擬似距離の差異
WA:衛星毎の重み付き
A:航法行列
LOS:車載装置3から衛星に対する視線方向ベクトルのX,Y,Z成分
ρcτ:車載装置3で受信した擬似距離[m]
dρ:GPS衛星1と車載装置3との間の擬似距離誤差
(=diono+dtrop+dmp)[m]
ε:車載装置3の雑音[m]
σδρ:擬似距離の誤差分散
また、測位計算部324は、受信した擬似距離誤差を用いて当該GPS衛星の擬似距離を修正する他、統計量の中の擬似距離誤差の平均値を用いて当該GPS衛星の擬似距離を修正しても良い。
また、路側装置2は、当該GPS衛星に関する擬似距離誤差の統計量を所定の条件に達した場合に廃棄して、新たに統計量を収集しても良い。所定の条件とは、具体的には、最大値と最小値の範囲が所定値以上になった場合などである。路側装置2の周辺の環境が変化したと判断できるからである。
以上のように、この実施の形態7によれば、路側装置2がGPS衛星1の擬似距離誤差の統計量を測定し、車載装置3は擬似距離誤差の統計量を用いてGPS衛星の擬似距離の修正を行なうので、測位計算の精度を上げることができる。
実施の形態8.
実施の形態1では、路側装置2がポール4に設置したGPS受信機21を用いてGPS衛星電波を受信し、当該GPS衛星の時刻および航法データを入手していた。この実施の形態8では、GPS衛星電波をビル等の屋上で取得するものである。
実施の形態1では、路側装置2がポール4に設置したGPS受信機21を用いてGPS衛星電波を受信し、当該GPS衛星の時刻および航法データを入手していた。この実施の形態8では、GPS衛星電波をビル等の屋上で取得するものである。
図25は、この実施の形態8に係るDGPS測位システムを説明する構成図である。図25では、GPS衛星電波が反射されたり遮蔽されたりせずに直接到達できるようなビル等の屋上にセンタ装置8が設置されている。なお、実施の形態1と同一の構成には同一の符号を付し、その説明は省略する。
センタ装置8は、GPS衛星からの電波が遮断されない位置で且つ既知の位置に設置されるとともに、前記GPS衛星からの電波を受信してGPS衛星との間の第2の擬似距離およびGPS衛星の第2の航法データを出力する第2のGPS受信機であるGPS受信機81と、第2の擬似距離、時刻情報および第2の航法データを路側装置2に配信処理する制御部82からなる。
センタ装置8と路側装置2aおよび2bとは通信線9で接続されており、路側装置2はセンタ装置8と有線通信を行い、擬似距離、時刻情報および航法データを取得する。なお、路側装置2とセンタ装置8との間は、無線で通信しても良い。
センタ装置8は、GPS衛星からの電波が遮断されない位置で且つ既知の位置に設置されるとともに、前記GPS衛星からの電波を受信してGPS衛星との間の第2の擬似距離およびGPS衛星の第2の航法データを出力する第2のGPS受信機であるGPS受信機81と、第2の擬似距離、時刻情報および第2の航法データを路側装置2に配信処理する制御部82からなる。
センタ装置8と路側装置2aおよび2bとは通信線9で接続されており、路側装置2はセンタ装置8と有線通信を行い、擬似距離、時刻情報および航法データを取得する。なお、路側装置2とセンタ装置8との間は、無線で通信しても良い。
路側装置2aや2b付近では、ビル等の影響で低仰角のGPS衛星電波が遮蔽されて、路側装置2aや2bが特定のGPS衛星のデータを受信できない場合や、GPS衛星の軌道の一部によっては、一定時間だけ電波を受信できない場合などがあり得る。
このような場合、路側装置2aや2bは、自らが有するGPS受信機2では受信できないGPS衛星電波のデータを、GPS受信機2の替わりにセンタ装置8を介して取得する。センタ装置8付近と車載装置3におけるマルチパスの影響は異なるため、マルチパス誤差の修正の精度は、実施の形態1に比べて小さくなるが、当該GPS衛星のデータを連続的に取得することはできる。
センタ装置8が受信していたGPS衛星からの電波を、路側装置2aや2bが受信できる状態に復帰した場合には、当該GPS衛星の電波の受信を路側装置2aや2bが再び行なえば、マルチパスの影響を考慮した擬似距離の修正の精度を元に戻すことができる。
このような場合、路側装置2aや2bは、自らが有するGPS受信機2では受信できないGPS衛星電波のデータを、GPS受信機2の替わりにセンタ装置8を介して取得する。センタ装置8付近と車載装置3におけるマルチパスの影響は異なるため、マルチパス誤差の修正の精度は、実施の形態1に比べて小さくなるが、当該GPS衛星のデータを連続的に取得することはできる。
センタ装置8が受信していたGPS衛星からの電波を、路側装置2aや2bが受信できる状態に復帰した場合には、当該GPS衛星の電波の受信を路側装置2aや2bが再び行なえば、マルチパスの影響を考慮した擬似距離の修正の精度を元に戻すことができる。
以上のように、この実施の形態8では、路側装置2aや2bは、そのGPS衛星の航法データを受信できない時間帯があってもセンタ装置8を介してGPS衛星電波を連続受信でき、車載装置3の測位計算の精度を維持することができる。
実施の形態9.
実施の形態1では、路側装置2が擬似距離誤差d6を計算し、車載装置3は擬似距離誤差d6を用いて測位計算をしていた。さらに説明すると、路側装置2は、道路近くに設置され且つ設置位置が既知であるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置であり、車載装置3は、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置であるとする。このとき、路側装置2が第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離、および第1の擬似距離に基づき第1の擬似距離の誤差である擬似距離誤差を求める擬似距離誤差計算手段を実行し、車載装置3が第3の擬似距離および擬似距離誤差に基づき端末装置の位置を算出する位置算出手段を実行していた。
しかし、この擬似距離誤差計算手段や位置算出手段は、路側装置2や車載装置3以外の箇所で実行されても良い。
実施の形態1では、路側装置2が擬似距離誤差d6を計算し、車載装置3は擬似距離誤差d6を用いて測位計算をしていた。さらに説明すると、路側装置2は、道路近くに設置され且つ設置位置が既知であるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置であり、車載装置3は、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置であるとする。このとき、路側装置2が第1の航法データを用いて計算したGPS衛星の位置と路側装置の設置位置との間の直線距離、および第1の擬似距離に基づき第1の擬似距離の誤差である擬似距離誤差を求める擬似距離誤差計算手段を実行し、車載装置3が第3の擬似距離および擬似距離誤差に基づき端末装置の位置を算出する位置算出手段を実行していた。
しかし、この擬似距離誤差計算手段や位置算出手段は、路側装置2や車載装置3以外の箇所で実行されても良い。
この実施の形態9では、第1の例として、実施の形態1に係るDGPS測位システムが新たな管理装置を備え、この管理装置が擬似距離誤差計算手段および位置算出手段を実施する場合を挙げる。この実施の形態9に係る管理装置は、路側装置2および車載装置3とデータの送受信ができる通信機を備えており、さらに路側装置2および車載装置3から取得したデータを基に擬似距離誤差計算手段および位置算出手段を実行する制御部を備えている。また、この実施の形態9に係る路側装置2および車載装置3のそれぞれは、管理装置とデータの送受信ができる通信機を備えている。以降に路側装置2、車載装置3および管理装置の動作の例を説明する。
路側装置2は、管理装置と通信を行って、擬似距離誤差計算部222が擬似距離誤差の計算に用いていた航法データd1や第1の擬似距離d2などのデータを管理装置に送信する。
車載装置3も路側装置2と同様に、管理装置と通信を行なって、誤差計算部322、測位補強データ解読部323および測位計算部324が測位計算に用いていた航法データd7や第3の擬似距離d8などのデータを管理装置に送信する。
管理装置は、擬似距離誤差計算手段および位置算出手段を実行し、車載装置3に関する測位計算結果を車載装置3に送信する。
路側装置2は、管理装置と通信を行って、擬似距離誤差計算部222が擬似距離誤差の計算に用いていた航法データd1や第1の擬似距離d2などのデータを管理装置に送信する。
車載装置3も路側装置2と同様に、管理装置と通信を行なって、誤差計算部322、測位補強データ解読部323および測位計算部324が測位計算に用いていた航法データd7や第3の擬似距離d8などのデータを管理装置に送信する。
管理装置は、擬似距離誤差計算手段および位置算出手段を実行し、車載装置3に関する測位計算結果を車載装置3に送信する。
また、第2の例として、DGPS測位システムを構成する車載装置3が擬似距離誤差計算手段および位置算出手段を実施する場合を挙げ、以降に路側装置2および車載装置3の動作の例を説明する。
路側装置2は、擬似距離誤差計算部222が擬似距離誤差d6の計算に用いていた航法データd1や第1の擬似距離d2などのデータを車載装置3に送信する。
車載装置3は、擬似距離誤差計算手段および位置算出手段を実行し、測位計算をする。
路側装置2は、擬似距離誤差計算部222が擬似距離誤差d6の計算に用いていた航法データd1や第1の擬似距離d2などのデータを車載装置3に送信する。
車載装置3は、擬似距離誤差計算手段および位置算出手段を実行し、測位計算をする。
以上のように、この実施の形態9によれば、擬似距離誤差計算手段および位置算出手段に必要なデータさえ取得できれば、路側装置2および車載装置3のそれぞれで擬似距離誤差および測位計算を行なう必要はなく、実施の形態1と同様の効果を得ることができる。
実施の形態10.
実施の形態9に係るDGPS測位システムは、擬似距離誤差計算手段および位置算出手段を備えていたが、それに加えて、実施の形態2に記載のようにDGPS補正データを受信して、これを測位計算に使用しても良い。
実施の形態9に係るDGPS測位システムは、擬似距離誤差計算手段および位置算出手段を備えていたが、それに加えて、実施の形態2に記載のようにDGPS補正データを受信して、これを測位計算に使用しても良い。
ここでは、実施の形態9における第2の例を引用して、この実施の形態10に係るDGPS測位システムを説明する。
路側装置2は擬似距離誤差計算部222が擬似距離誤差d6の計算に用いていた航法データd1や第1の擬似距離d2などのデータとDGPS補正データ7とを車載装置3に送信する。
車載装置3は、擬似距離誤差計算手段において路側装置2から受信した擬似距離誤差d6およびDGPS補正データ7からマルチパス誤差dmpを計算し、位置算出手段においてマルチパス誤差dmpおよび車載装置3のDGPS補正データ受信機が受信したDGPS補正データ7を用いて車載装置3の位置を算出する。
路側装置2は擬似距離誤差計算部222が擬似距離誤差d6の計算に用いていた航法データd1や第1の擬似距離d2などのデータとDGPS補正データ7とを車載装置3に送信する。
車載装置3は、擬似距離誤差計算手段において路側装置2から受信した擬似距離誤差d6およびDGPS補正データ7からマルチパス誤差dmpを計算し、位置算出手段においてマルチパス誤差dmpおよび車載装置3のDGPS補正データ受信機が受信したDGPS補正データ7を用いて車載装置3の位置を算出する。
以上のように、この実施の形態10によれば、実施の形態9同様、擬似距離誤差計算手段および位置算出手段に必要なデータさえ取得できれば、路側装置2および車載装置3のそれぞれで擬似距離誤差および測位計算を行なう必要はなく、実施の形態2と同様の効果を得ることができる。
実施の形態11.
実施の形態9に係るDGPS測位システムに加えて、実施の形態3から5に記載のように、複数の路側装置2a〜2fを備え、路側装置2a〜2fがそれぞれ計算した擬似距離誤差およびそれぞれの設置位置を考慮して、擬似距離誤差を補間計算しても良い。
実施の形態9に係るDGPS測位システムに加えて、実施の形態3から5に記載のように、複数の路側装置2a〜2fを備え、路側装置2a〜2fがそれぞれ計算した擬似距離誤差およびそれぞれの設置位置を考慮して、擬似距離誤差を補間計算しても良い。
この実施の形態11に係るDGPSシステムでは、例えば、複数の路側装置2が擬似距離誤差算出手段を実行して擬似距離誤差を計算するとともに、擬似距離誤差を路側装置2の設置位置を車載装置3に送信する。車載装置3は、位置算出手段に加え、2以上の路側装置の設置位置および擬似距離誤差、ならびに車載装置3の位置に基づき車載装置3の位置における擬似距離誤差を補間して計算する擬似距離誤差補間手段を備えている。位置算出手段は第3の擬似距離および擬似距離誤差補間手段が計算した擬似距離誤差に基づき車載装置3の位置を算出する。
以上のように、この実施の形態11によれば、擬似距離誤差補間手段を備えることで、複数の擬似距離誤差から擬似距離誤差を補間計算できるので、実施の形態3から5と同様の効果を得ることができる。
実施の形態12.
実施の形態9に係るDGPS測位システムに加えて、実施の形態7に記載のように、擬似距離誤差の統計量を考慮しても良い。
実施の形態9に係るDGPS測位システムに加えて、実施の形態7に記載のように、擬似距離誤差の統計量を考慮しても良い。
この実施の形態12に係るDGPSシステムでは、例えば、路側装置2が擬似距離誤差計算手段に加えて擬似距離誤差の統計量を求める統計量計算手段を備え、車載装置3の位置算出手段が第3の擬似距離を統計量に基づき取捨選択する動作も備えれば、実施の形態7と同様の効果を得ることができる。
実施の形態13.
実施の形態9に係るDGPS測位システムは、擬似距離誤差計算手段および位置算出手段を備え、擬似距離誤差に基づき車載装置3の測位計算をしていた。この実施の形態13では、擬似距離誤差の替わりに、実施の形態6に記載のように擬似距離の変化率を用いて測位計算を行なっても良い。
実施の形態9に係るDGPS測位システムは、擬似距離誤差計算手段および位置算出手段を備え、擬似距離誤差に基づき車載装置3の測位計算をしていた。この実施の形態13では、擬似距離誤差の替わりに、実施の形態6に記載のように擬似距離の変化率を用いて測位計算を行なっても良い。
この実施の形態13に係るDGPS測位システムでは、例えば、路側装置2が、道路近くに設置され且つ設置位置が既知であるとともにGPS衛星からの電波を受信してGPS衛星との間の第1の擬似距離およびGPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置であり、車載装置3が、GPS衛星からの電波を受信してGPS衛星との間の第3の擬似距離およびGPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置であるとする。
この場合、路側装置2が第1の擬似距離の変化率である第1の擬似距離変化率を計算する第1の擬似距離変化率計算手段を実行し、車載装置3が第3の擬似距離の変化率である第3の擬似距離変化率を計算する第3の擬似距離変化率計算手段を実行し、さらに車載装置3は第1の擬似距離、第1の擬似距離変化率、および第3の擬似距離変化率に基づき車載装置3の位置を算出する位置算出手段を実行すれば、実施の形態6と同様の測位計算を行なえる。
この場合、路側装置2が第1の擬似距離の変化率である第1の擬似距離変化率を計算する第1の擬似距離変化率計算手段を実行し、車載装置3が第3の擬似距離の変化率である第3の擬似距離変化率を計算する第3の擬似距離変化率計算手段を実行し、さらに車載装置3は第1の擬似距離、第1の擬似距離変化率、および第3の擬似距離変化率に基づき車載装置3の位置を算出する位置算出手段を実行すれば、実施の形態6と同様の測位計算を行なえる。
なお、第1の擬似距離変化率計算手段、第3の擬似距離変化率計算手段および位置算出手段は、実施の形態9同様、これらの3つの手段の実行に必要なデータさえあれば、路側装置2や車載装置3以外の箇所で実行されても良く、実施の形態6と同様の効果を得ることができる。
ところで、上記説明では、この発明の端末装置を車に搭載した車載装置3に適用した場合について述べたが、携帯電話やPDAなどに適用して、算出した自らの位置を携帯電話等の画面に表示させても良い。この場合、携帯電話等のユーザが路側装置2の付近、具体的には路側装置2との通信が可能な範囲にいれば、自らの正確な位置を知ることができる。
また、実施の形態3から5、および11では、車載装置3は、複数の路側装置2の擬似距離誤差および路側装置2の設置位置、ならびに車載装置3の位置に基づき擬似距離誤差を補間計算していたが、擬似距離誤差の替わりにマルチパス誤差dmpを補間計算しても良い。この場合、路側装置2はDGPS補正データ7を用いてマルチパス誤差dmpを計算し、マルチパス誤差dmpと路側装置2の設置を路側装置2のデータd16およびd17として車載装置3に送信する。車載装置3は、マルチパス誤差を補間計算した後に、DGPS補正データ7とともに測位計算すれば良い。
同様に、実施の形態7および12では、擬似距離誤差の統計量を測位計算に用いていたが、実施の形態2に示すようにマルチパス誤差dmpを用いて測位計算する場合にも、マルチパスの統計量を取得して測位計算に用いても良い。
さらに、実施の形態8では、センタ装置8から取得したデータを用いて擬似距離誤差d6を計算する場合を想定して説明したが、マルチパス誤差dmpを計算しても良い。
さらに、実施の形態8では、センタ装置8から取得したデータを用いて擬似距離誤差d6を計算する場合を想定して説明したが、マルチパス誤差dmpを計算しても良い。
また、実施の形態1では、時刻d4を取得する別の形態として、路側装置2が電波時計26を有し、電波時計26から時刻d4を取得する場合を、図8や図9を用いて説明した。実施の形態2から8においても、路側装置2は、複数の擬似距離d2に基づき時刻d4を求める替わりに、電波時計26を備えて電波時計26から時刻d4を取得しても良い。
1 GPS衛星 2 路側装置 21 GPS受信機 22制御部 222 擬似距離誤差計算部 223 測位補強データ生成部 23通信機 3 車載装置
d1 GPS衛星1の第1の航法データ d2 路側装置2とGPS衛星1との間の第1の擬似距離 d5 GPS衛星1の位置 d6 擬似距離誤差
d1 GPS衛星1の第1の航法データ d2 路側装置2とGPS衛星1との間の第1の擬似距離 d5 GPS衛星1の位置 d6 擬似距離誤差
Claims (17)
- 道路近くに設置され且つ設置位置が既知である路側装置であって、
GPS衛星からの電波を受信して前記GPS衛星との間の第1の擬似距離および前記GPS衛星の第1の航法データを出力する第1のGPS受信機、
前記第1の航法データを用いて計算した前記GPS衛星の位置と前記路側装置の設置位置との間の直線距離および前記第1の擬似距離に基づき擬似距離誤差を求める擬似距離誤差計算部と、
前記擬似距離誤差に基づく補正データを生成する補正データ生成部と
を有する制御装置、
前記補正データを端末装置に送信する通信機
を備えた路側装置。 - DGPS補正データを取得するDGPS補正データ受信機を備え、
補正データ生成部は、補正データを擬似距離誤差と前記DGPS補正データとの差分に基づき生成することを特徴とする請求項1に記載の路側装置。 - 自らを第1の路側装置とし、その他の路側装置を第2の路側装置として、
前記第1の路側装置が求めた擬似距離誤差および前記第1の路側装置の設置位置を送信、または前記第2の路側装置が求めた擬似距離誤差および前記第2の路側装置の設置位置を受信する路側装置間通信機を備え、
補正データ生成部は、前記第1の路側装置が求めた擬似距離誤差、前記第1の路側装置の設置位置、前記第2の路側装置が求めた擬似距離誤差、および前記第2の路側装置の設置位置に基づき補正データを生成することを特徴とする請求項1に記載の路側装置。 - 擬似距離誤差の統計量を計算する統計量計算部を備え、
通信機は補正データとともに前記統計量を端末装置に送信することを特徴とする請求項1に記載の路側装置。 - 道路近くに設置され且つ設置位置が既知である路側装置であって、
GPS衛星からの電波を受信して前記GPS衛星との間の第1の擬似距離および前記GPS衛星の第1の航法データを出力する第1のGPS受信機、
前記第1の航法データを用いて計算した前記GPS衛星の位置と前記路側装置の設置位置との間の直線距離、および前記第1の航法データから求めた前記GPS衛星の速度に基づき前記第1の擬似距離の変化率である擬似距離変化率を求める擬似距離変化率計算部と、
前記擬似距離変化率に基づく補正データを生成する補正データ生成部と
を有する制御装置、
前記補正データを端末装置に送信する通信機
を備えた路側装置。 - GPS衛星からの電波が遮断されない位置で且つ既知の位置に設置されるとともに、前記GPS衛星からの電波を受信して前記GPS衛星との間の第2の擬似距離および前記GPS衛星の第2の航法データを出力する第2のGPS受信機を備え、
制御装置は、前記GPS衛星からの電波が遮断された場合に前記第2のGPS受信機から前記第2の擬似距離および前記第2の航法データを取得することを特徴とする、請求項1または5のいずれか1項に記載の路側装置。 - GPS衛星からの電波を受信して前記GPS衛星との間の第3の擬似距離および前記GPS衛星の第3の航法データを出力する第3のGPS受信機、
前記GPS衛星と路側装置との間の擬似距離誤差に基づく補正データを前記路側装置から受信する通信機、
前記第3の擬似距離および前記補正データに基づき自らの位置を算出する位置算出部を有する制御装置
を備えた端末装置。 - DGPS補正データを取得するDGPS補正データ受信機を備え、
通信機が受信する補正データは擬似距離誤差と前記DGPS補正データの差分であり、
位置算出部は、第3の擬似距離、前記補正データおよび前記DGPS補正データに基づき自らの位置を算出することを特徴とする請求項7に記載の端末装置。 - 制御装置は、補正データに含まれた複数の路側装置の擬似距離誤差および前記路側装置の設置位置と自らの位置とに基づいて自らの位置における擬似距離誤差を補間して計算する擬似距離誤差補間部を備え、
位置算出部は第3の擬似距離および前記擬似距離誤差補間部が計算した擬似距離誤差に基づき自らの位置を算出することを特徴とする請求項7に記載の端末装置。 - 位置算出部は、第3の擬似距離、補正データおよび路側装置の擬似距離誤差の統計量に基づき自らの位置を算出することを特徴とする請求項7に記載の端末装置。
- GPS衛星からの電波を受信して前記GPS衛星との間の第3の擬似距離および前記GPS衛星の第3の航法データを出力する第3のGPS受信機、
前記第3の航法データから求めた前記GPS衛星の速度および位置、自らの位置と速度、ならびに前記第3の擬似距離の変化率である擬似距離変化率を求める擬似距離変化率計算部と、
前記第3の擬似距離および前記擬似距離変化率に基づき自らの位置を算出する位置算出部を有する制御装置
を備えた端末装置。 - GPS衛星と路側装置との間の第1の擬似距離の変化率である路側装置の擬似距離変化率に基づく補正データを前記路側装置から受信する通信機を備え、
位置算出部は、第3の擬似距離、擬似距離変化率および前記路側装置の擬似距離変化率に基づき自らの位置を算出することを特徴とする請求項11に記載の端末装置。 - 道路近くに設置され且つ設置位置が既知であるとともにGPS衛星からの電波を受信して前記GPS衛星との間の第1の擬似距離および前記GPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置、
前記GPS衛星からの電波を受信して前記GPS衛星との間の第3の擬似距離および前記GPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置、
前記第1の航法データを用いて計算した前記GPS衛星の位置と前記路側装置の設置位置との間の直線距離、および前記第1の擬似距離に基づき前記第1の擬似距離の誤差である擬似距離誤差を求める擬似距離誤差計算手段、
前記第3の擬似距離および前記擬似距離誤差に基づき前記端末装置の位置を算出する位置算出手段
を備えたDGPS測位システム。 - DGPS補正データを取得するDGPS補正データ受信機を備え、
位置算出手段は、第3の擬似距離、擬似距離誤差および前記DGPS補正データに基づき端末装置の位置を算出することを特徴とする請求項13に記載のDGPS測位システム。 - 2以上の路側装置の設置位置および擬似距離誤差、ならびに端末装置の位置に基づき前記端末装置の位置における擬似距離誤差を補間して計算する擬似距離誤差補間手段を備え、位置算出手段は第3の擬似距離および前記擬似距離誤差補間手段が計算した前記擬似距離誤差に基づき前記端末装置の位置を算出することを特徴とする請求項13に記載に記載のDGPS測位システム。
- 擬似距離誤差の統計量を求める統計量計算手段を備え、
位置算出手段は、第3の擬似距離を前記統計量に基づき取捨選択することを特徴とする請求項13に記載のDGPS測位システム。 - 道路の近くに設置され且つ設置位置が既知であるとともにGPS衛星からの電波を受信して前記GPS衛星との間の第1の擬似距離および前記GPS衛星の第1の航法データを出力する第1のGPS受信機を備えた路側装置、
前記GPS衛星からの電波を受信して前記GPS衛星との間の第3の擬似距離および前記GPS衛星の第3の航法データを出力する第3のGPS受信機を備えた端末装置、
前記第1の擬似距離の変化率である第1の擬似距離変化率を計算する第1の擬似距離変化率計算手段、
前記第3の擬似距離の変化率である第3の擬似距離変化率を計算する第3の擬似距離変化率計算手段、
前記第1の擬似距離変化率、前記第3の擬似距離、および前記第3の擬似距離変化率に基づき前記端末装置の位置を算出する位置算出手段
を備えたDGPS測位システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006167692A JP2007333636A (ja) | 2006-06-16 | 2006-06-16 | 路側装置、端末装置およびdgps測位システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006167692A JP2007333636A (ja) | 2006-06-16 | 2006-06-16 | 路側装置、端末装置およびdgps測位システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007333636A true JP2007333636A (ja) | 2007-12-27 |
Family
ID=38933240
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006167692A Pending JP2007333636A (ja) | 2006-06-16 | 2006-06-16 | 路側装置、端末装置およびdgps測位システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007333636A (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012018094A (ja) * | 2010-07-08 | 2012-01-26 | Advanced Telecommunication Research Institute International | 相対測位装置、および相対測位方法 |
| JP2012112959A (ja) * | 2010-11-24 | 2012-06-14 | Javad Gnss Inc | Gnssデバイスにおける衛星信号マルチパス緩和 |
| JP2012211795A (ja) * | 2011-03-31 | 2012-11-01 | Hitachi Zosen Corp | 海面における中周期波の計測方法および計測装置 |
| JP2013534623A (ja) * | 2010-06-14 | 2013-09-05 | ユニヴァーシタ’デグリ ステュディ ディ ローマ “ラ サピエンツァ” | グローバル・ナビゲーション衛星システム−gnss及び/又は擬似衛星に基づく構造物の地震動又は振動を測定するシステム |
| JP2013181872A (ja) * | 2012-03-02 | 2013-09-12 | Advanced Telecommunication Research Institute International | 相対測位装置、相対測位方法、およびプログラム |
| JP2013246038A (ja) * | 2012-05-25 | 2013-12-09 | Denso Corp | 車両用現在位置決定装置 |
| KR101384487B1 (ko) * | 2010-05-14 | 2014-04-10 | 한국전자통신연구원 | 위성항법 수신기의 의사거리 검증 방법 및 장치 |
| JP2017161350A (ja) * | 2016-03-09 | 2017-09-14 | 三菱電機株式会社 | 誤差配信システム |
| JP2017219498A (ja) * | 2016-06-10 | 2017-12-14 | パナソニックIpマネジメント株式会社 | 路側装置、移動端末装置、衛星測位システムおよび衛星測位方法 |
| KR20180086755A (ko) * | 2017-01-23 | 2018-08-01 | 국방과학연구소 | 위성 간 통신 거리 측정값 추정 및 그 측정값을 사용자에게 전달하는 방법 |
| KR20190078554A (ko) * | 2016-06-01 | 2019-07-04 | 현대오토에버 주식회사 | V2x 기반 차량 위성항법신호에 대한 오차보정데이터 생성을 위한 방법 |
| CN111708065A (zh) * | 2020-05-22 | 2020-09-25 | 广州杰赛科技股份有限公司 | 一种基于智能网联汽车的定位方法、装置及存储介质 |
| JP2021025802A (ja) * | 2019-07-31 | 2021-02-22 | パナソニックIpマネジメント株式会社 | 車載器、サーバ、測位方法、および情報送信方法 |
| JP2022074698A (ja) * | 2020-11-05 | 2022-05-18 | 国立研究開発法人 海上・港湾・航空技術研究所 | Gnssを用いた車両の測位に用いる擬似距離誤差の評価指標及び測位解の信頼性指標を求める方法及びサイクルスリップを検出し、波数バイアスを修正する方法、及びgnssを用いた車両の測位方法及びその装置 |
| CN114793318A (zh) * | 2021-01-26 | 2022-07-26 | 千寻位置网络有限公司 | 数据播发方法、装置及路侧单元 |
| CN116148904A (zh) * | 2022-12-26 | 2023-05-23 | 深圳成谷科技有限公司 | 定位方法、装置、终端设备、系统和计算机可读存储介质 |
| JP2023530651A (ja) * | 2020-08-14 | 2023-07-19 | 中移(上海)信息通信科技有限公司 | 情報送信方法、装置、デバイス及びコンピュータ記憶媒体 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005233714A (ja) * | 2004-02-18 | 2005-09-02 | Tech Res & Dev Inst Of Japan Def Agency | 測位方法及びデータ転送装置 |
| JP2006112822A (ja) * | 2004-10-12 | 2006-04-27 | Mitsubishi Electric Corp | 移動局、dgps基準局、dgpsセンター局、及びdgps測位システム |
-
2006
- 2006-06-16 JP JP2006167692A patent/JP2007333636A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005233714A (ja) * | 2004-02-18 | 2005-09-02 | Tech Res & Dev Inst Of Japan Def Agency | 測位方法及びデータ転送装置 |
| JP2006112822A (ja) * | 2004-10-12 | 2006-04-27 | Mitsubishi Electric Corp | 移動局、dgps基準局、dgpsセンター局、及びdgps測位システム |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101384487B1 (ko) * | 2010-05-14 | 2014-04-10 | 한국전자통신연구원 | 위성항법 수신기의 의사거리 검증 방법 및 장치 |
| JP2013534623A (ja) * | 2010-06-14 | 2013-09-05 | ユニヴァーシタ’デグリ ステュディ ディ ローマ “ラ サピエンツァ” | グローバル・ナビゲーション衛星システム−gnss及び/又は擬似衛星に基づく構造物の地震動又は振動を測定するシステム |
| JP2012018094A (ja) * | 2010-07-08 | 2012-01-26 | Advanced Telecommunication Research Institute International | 相対測位装置、および相対測位方法 |
| JP2012112959A (ja) * | 2010-11-24 | 2012-06-14 | Javad Gnss Inc | Gnssデバイスにおける衛星信号マルチパス緩和 |
| JP2012211795A (ja) * | 2011-03-31 | 2012-11-01 | Hitachi Zosen Corp | 海面における中周期波の計測方法および計測装置 |
| JP2013181872A (ja) * | 2012-03-02 | 2013-09-12 | Advanced Telecommunication Research Institute International | 相対測位装置、相対測位方法、およびプログラム |
| JP2013246038A (ja) * | 2012-05-25 | 2013-12-09 | Denso Corp | 車両用現在位置決定装置 |
| JP2017161350A (ja) * | 2016-03-09 | 2017-09-14 | 三菱電機株式会社 | 誤差配信システム |
| KR20190078554A (ko) * | 2016-06-01 | 2019-07-04 | 현대오토에버 주식회사 | V2x 기반 차량 위성항법신호에 대한 오차보정데이터 생성을 위한 방법 |
| KR102107936B1 (ko) * | 2016-06-01 | 2020-05-08 | 현대오토에버 주식회사 | V2x 기반 차량 위성항법신호에 대한 오차보정데이터 생성을 위한 방법 |
| JP2017219498A (ja) * | 2016-06-10 | 2017-12-14 | パナソニックIpマネジメント株式会社 | 路側装置、移動端末装置、衛星測位システムおよび衛星測位方法 |
| KR101887074B1 (ko) * | 2017-01-23 | 2018-08-09 | 국방과학연구소 | 위성 간 통신 거리 측정값 추정 및 그 측정값을 사용자에게 전달하는 방법 |
| KR20180086755A (ko) * | 2017-01-23 | 2018-08-01 | 국방과학연구소 | 위성 간 통신 거리 측정값 추정 및 그 측정값을 사용자에게 전달하는 방법 |
| JP2021025802A (ja) * | 2019-07-31 | 2021-02-22 | パナソニックIpマネジメント株式会社 | 車載器、サーバ、測位方法、および情報送信方法 |
| JP7340757B2 (ja) | 2019-07-31 | 2023-09-08 | パナソニックIpマネジメント株式会社 | サーバ、および情報送信方法 |
| CN111708065A (zh) * | 2020-05-22 | 2020-09-25 | 广州杰赛科技股份有限公司 | 一种基于智能网联汽车的定位方法、装置及存储介质 |
| JP2023530651A (ja) * | 2020-08-14 | 2023-07-19 | 中移(上海)信息通信科技有限公司 | 情報送信方法、装置、デバイス及びコンピュータ記憶媒体 |
| EP4155678A4 (en) * | 2020-08-14 | 2023-12-20 | China Mobile Shanghai ICT Co., Ltd | Information sending method, apparatus and device, and computer storage medium |
| US12422564B2 (en) | 2020-08-14 | 2025-09-23 | China Mobile Shanghai Ict Co., Ltd. | Information sending method, apparatus and device, and computer storage medium |
| JP2022074698A (ja) * | 2020-11-05 | 2022-05-18 | 国立研究開発法人 海上・港湾・航空技術研究所 | Gnssを用いた車両の測位に用いる擬似距離誤差の評価指標及び測位解の信頼性指標を求める方法及びサイクルスリップを検出し、波数バイアスを修正する方法、及びgnssを用いた車両の測位方法及びその装置 |
| JP7725013B2 (ja) | 2020-11-05 | 2025-08-19 | 国立研究開発法人 海上・港湾・航空技術研究所 | Gnssを用いた車両の測位に用いる擬似距離誤差の評価指標により測位計算に用いるgnss衛星を選択する方法及び測位解の信頼性指標を求める方法及びgnssを用いた車両の測位方法及びその装置 |
| CN114793318A (zh) * | 2021-01-26 | 2022-07-26 | 千寻位置网络有限公司 | 数据播发方法、装置及路侧单元 |
| CN116148904A (zh) * | 2022-12-26 | 2023-05-23 | 深圳成谷科技有限公司 | 定位方法、装置、终端设备、系统和计算机可读存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007333636A (ja) | 路側装置、端末装置およびdgps測位システム | |
| EP2054555B1 (en) | Excavator 3d integrated laser and radio positioning guidance system | |
| CN104614750B (zh) | 车辆位置确定方法 | |
| JP7334503B2 (ja) | 測位方法、測位システム、および移動局 | |
| CN101382431A (zh) | 定位系统及其方法 | |
| CN108885269B (zh) | 导航方法、导航装置和导航系统 | |
| CN104536026A (zh) | 一种动态对动态实时测量系统 | |
| KR20200116437A (ko) | 농기계 및 그의 자율 주행 방법 | |
| KR101605357B1 (ko) | 측위 방법 및 그 측위 장치 | |
| US20160091612A1 (en) | Method for displaying a position of a vehicle | |
| JP2013246038A (ja) | 車両用現在位置決定装置 | |
| KR20190010267A (ko) | 차량용 항법장치 및 방법, 그리고 항법시스템 | |
| JP2021047054A (ja) | 測位システム、サーバ、測位方法、プログラム、測位対象の装置及び移動体 | |
| WO2019049541A1 (ja) | 測位システム | |
| KR20130002086A (ko) | 오차 보정을 통한 추측항법 시스템 및 그 방법 | |
| EP3767235B1 (en) | System for mapping building interior with pedestrian dead reckoning and ranging and related methods | |
| US12072431B2 (en) | Position specifying system for mobile object and mobile object used for the position specifying system | |
| CN119816759A (zh) | 一种定位方法和装置 | |
| US20250076077A1 (en) | Map Processing Device and Map Processing Method | |
| US11762104B2 (en) | Method and device for locating a vehicle | |
| KR102808742B1 (ko) | 위성항법 측위 시스템 | |
| JP2019045456A (ja) | 測位システム | |
| JP2005077291A (ja) | 三次元測位システム | |
| JP2017032486A (ja) | 携帯端末の位置測定システム、携帯端末及び位置測定プログラム | |
| RU2018111105A (ru) | Комплексный способ навигации летательного аппарата |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120313 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20120329 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120703 |