JP2007336679A - 電動車両の駆動力推定装置、自動車および電動車両の駆動力推定方法 - Google Patents
電動車両の駆動力推定装置、自動車および電動車両の駆動力推定方法 Download PDFInfo
- Publication number
- JP2007336679A JP2007336679A JP2006165139A JP2006165139A JP2007336679A JP 2007336679 A JP2007336679 A JP 2007336679A JP 2006165139 A JP2006165139 A JP 2006165139A JP 2006165139 A JP2006165139 A JP 2006165139A JP 2007336679 A JP2007336679 A JP 2007336679A
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- driving
- driving force
- drive
- force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【解決手段】自動車1においては、各輪駆動力推定部103RL,103RRが推定した各駆動輪の駆動力に対し、駆動力相互作用調整部104が、1つの駆動輪を駆動する駆動モータの出力のうち、他の駆動輪を回転させる力として使われる分を反映させた補正を行う。したがって、駆動モータの出力トルクを基に駆動輪における駆動力を推定する際に、駆動輪相互の影響を加味した駆動力を推定することができ、電動車両の駆動力をより正確に推定することができる。
【選択図】図2
Description
例えば、特許文献1に記載された駆動力推定手法においては、「モータの出力トルクは、車輪を回転させる力と、路面に伝達されて車両を推進する力に使われる。」という仮定の下、以下の(1)式によって駆動力を推定する。
なお、以下の式において、Fmはモータの出力、Mwは駆動輪が回転するための慣性モーメントを質量相当に換算したもの、Vwは駆動輪の車輪速、Fdは推定駆動力である。
そのため、1つの車両に複数の駆動輪がある状態では、駆動輪相互が影響を及ぼし合い、正確な駆動力を推定することが困難であった。
本発明の課題は、電動車両における駆動力をより正確に推定することである。
駆動輪を駆動する駆動モータと、駆動輪の回転状態を検出する回転状態検出手段と、駆動輪それぞれに入力される前記駆動モータの出力を検出するモータ出力検出手段と、前記回転状態検出手段によって検出された駆動輪の回転状態と、前記モータ出力検出手段によって検出された駆動モータの出力とに基づいて、一の駆動輪が他の車輪を回転させる作用による駆動力成分を算入して各駆動輪における駆動力を推定する駆動力推定手段とを備えることを特徴としている。
複数の駆動輪と、車体に設置されたアクセルペダルと、前記アクセルペダルの操作量に基づいて、車両の駆動制御を行う駆動制御手段と、前記駆動制御手段の制御に従って、駆動輪を駆動する駆動モータと、駆動輪の回転状態を検出する回転状態検出手段と、駆動輪それぞれに入力される前記駆動モータの出力を検出するモータ出力検出手段と、前記回転状態検出手段によって検出された駆動輪の回転状態と、前記モータ出力検出手段によって検出された駆動モータの出力とに基づいて、一の駆動輪が他の車輪を回転させる作用による駆動力成分を算入して各駆動輪における駆動力を推定する駆動力推定手段とを備えることを特徴としている。
また、本発明に係る電動車両の駆動力推定方法は、
駆動輪の回転状態および駆動モータの出力に基づいて、駆動輪が他の車輪を回転させる作用を反映させて各駆動輪における駆動力を推定することを特徴としている。
(第1実施形態)
(構成)
図1は、本発明に係る自動車1の構成を示す概略図である。
図1において、自動車1は、左右の駆動輪2RL,2RRと、左右の駆動輪2RL,2RRをそれぞれ駆動する駆動モータ3RL,3RRと、駆動モータ3RL,3RRの駆動電流を制御するモータインバータ4RL,4RRと、駆動輪2RL,2RRそれぞれを車体に懸架するサスペンション5RL,5RRと、駆動輪2RL,2RRの駆動力を制御する制御ユニット6と、ステアリングホイール7と、操舵角センサ8と、アクセルペダルセンサ9と、ブレーキペダルセンサ10と、車両挙動センサ11と、電源ユニット12とを備えている。
駆動モータ3RL,3RRは、駆動輪2RL,2RRそれぞれの内部に一体的に備えられたモータであり、モータインバータ4RL,4RRから電流の供給を受けて、駆動輪2RL,2RRをそれぞれ駆動する。
サスペンション5RL,5RRは、駆動モータ3RL,3RRを一体に備える左右の駆動輪2RL,2RRそれぞれを車体に懸架する。
ステアリングホイール7は、運転者により車両の進行方向を指示する操舵操作が行われる。
アクセルペダルセンサ9は、運転者によってアクセルペダルに入力されたアクセル操作量を検出する。
ブレーキペダルセンサ10は、運転者によってブレーキペダルに入力されたブレーキ操作量を検出する。
車両挙動センサ11は、自動車1におけるヨーレートあるいは横滑り角等、車両挙動を示す指標値を検出する。
電源ユニット12は、モータインバータ4RL,4RRそれぞれが駆動モータ3RL,3RRに出力する駆動電流を供給する。
図2は、自動車1における制御系統の機能構成を示すブロック図である。
図2において、自動車1の制御系統は、図1に示す構成のうち、主として各種センサおよび制御ユニット6によって構成され、具体的には、駆動電流検出部101RL,101RRと、回転速度検出部102RL,102RRと、各輪駆動力推定部103RL,103RRと、駆動力相互作用調整部104と、各輪駆動力推定値出力部105RL,105RRとを備えている。
回転速度検出部102RL,102RRは、駆動モータ3RL,3RRそれぞれの回転速度を検出し、検出した回転速度を各輪駆動力推定部103RL,103RRにそれぞれ出力する。
駆動力相互作用調整部104は、各輪駆動力推定部103RL,103RRによって推定された駆動モータ3RL,3RRそれぞれの駆動力を基に、後述する補正方法に従って、各駆動輪間における駆動力の相互作用を反映させて各駆動輪の駆動力を補正し、補正後の各輪の駆動力を各輪駆動力推定値出力部105RL,105RRにそれぞれ出力する。
各輪駆動力推定値出力部105RL,105RRは、駆動力相互作用調整部104によって補正された各駆動輪の駆動力を、トラクションコントロール等、後段の処理にそれぞれ出力する。
次に、各輪駆動力推定部103RL,103RRにおける駆動力推定方法について説明する。
ここでは、「モータの出力トルクは、車輪を回転させる力と、路面に伝達されて車両を推進する力に使われる。」という仮定の下、以下の(2)式によって路面に伝達される駆動力を推定する。
続いて、駆動力相互作用調整部104における駆動輪間の相互作用に基づく駆動力の補正方法について説明する。
本実施形態においては、「モータの出力トルクは、そのモータに取り付けられた駆動輪を回転させる力と、路面に伝達されて車両を推進する力と、他のモータに取り付けられた駆動輪を回転させる力に使われる。」という仮定の下、以下のように駆動力を補正する。
図3は、左右の後輪が駆動輪である場合に、左後輪の駆動モータのみが駆動トルクを出力した場合の駆動力伝達モデルを示す図である。
図3の場合において、上記仮定に基づくと、以下の(3)式が成立する。
これは、車体が加速しているため、右後輪の車軸も車体に伴って加速し、その加速度によって発生する力が右後輪と路面の接点から伝わって右後輪を加速させることを示している。
この作用を考慮すると、左右後輪の駆動を表す運動方程式は以下のようになる。
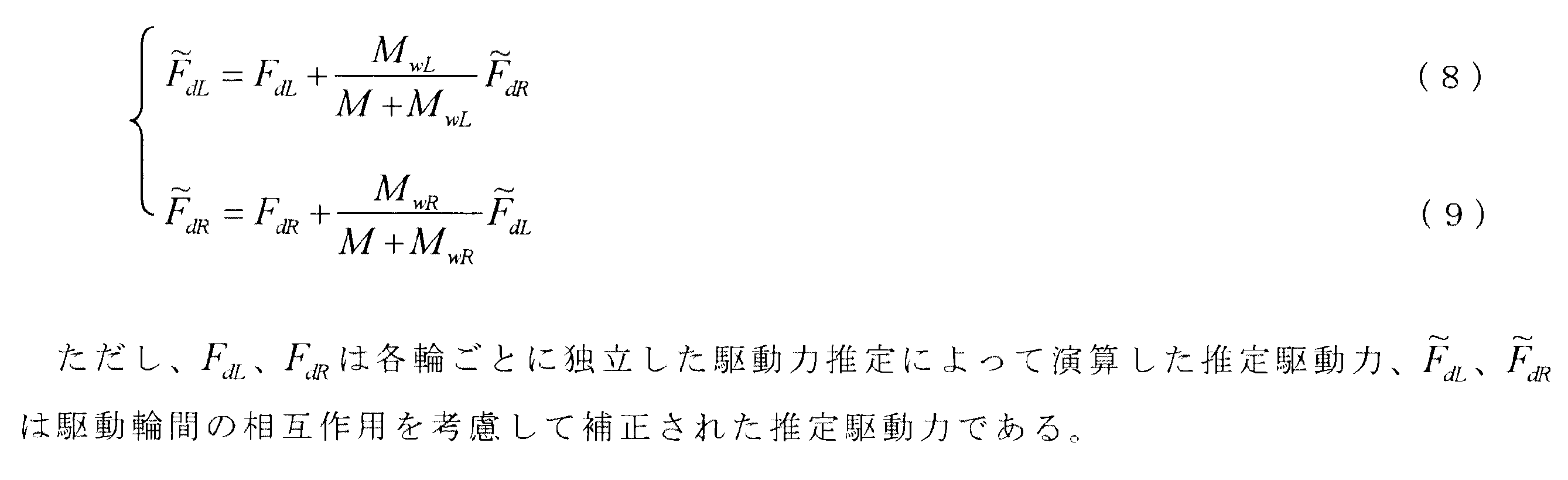
このように各輪ごとに独立した駆動力推定によって算出した推定駆動力を用いて、駆動輪間の相互作用を考慮した推定駆動力は、以下の(8)、(9)式のように表される。
なお、(8)、(9)式を整理すると、(10)式のように表される。
次に、自動車1における駆動力推定の動作について説明する。
図4は、自動車1の制御系統によって実行される駆動力推定処理を示すフローチャートである。
図4において、駆動力推定処理は、自動車1のイグニションオンと共に開始される。
駆動力推定処理が開始されると、駆動電流検出部101RL,101RRが駆動モータ3RL,3RRの駆動電流値を検出すると共に、回転速度検出部102RL,102RRが駆動モータ3RL,3RRの回転速度を検出する(ステップS1)。
次いで、駆動力相互作用調整部104が、(8)、(9)式に従って、各輪駆動力推定部103RL,103RRの推定結果を補正する(ステップS3)。これにより、駆動輪間の相互作用を考慮して補正された推定駆動力が得られる。
そして、各輪駆動力推定値出力部105RL,105RRが、左右の各駆動輪における推定駆動力を、それぞれ後段の処理に出力する(ステップS4)。
その後、ステップS1に戻り、駆動力推定処理が繰り返される。
図5に示すように、第1段のブロックでは、図4に示すステップS1に相当する処理が行われ、駆動電流検出部101RL,101RRによって検出された駆動電流値および回転速度検出部102RL,102RRによって検出された回転速度が第2段のブロックに入力される。
第4段のブロックでは、左右輪それぞれにおける補正後の駆動力推定値が、後段の処理に出力される。
以上のように、本実施形態に係る自動車1においては、各輪駆動力推定部103RL,103RRが推定した各駆動輪の駆動力に対し、駆動力相互作用調整部104が、1つの駆動輪を駆動する駆動モータの出力のうち、他の駆動輪を回転させる力として使われる分を反映させた補正を行う。
ここで、本実施形態において、駆動モータ3RL,3RRは、駆動輪2RL,2RRそれぞれの内部に一体的に備えられたモータ(インホイールモータ)であることとして説明したが、各駆動輪における駆動力を独立して制御可能な構成であれば、各駆動輪が駆動モータを備えている構成の他、1つの駆動モータが複数の駆動輪を駆動する構成においても本発明を適用できる。
上記実施形態においては、各輪駆動力推定部103RL,103RRによって推定された駆動力に対し、図3に示す駆動力伝達モデルを想定して(8)、(9)式に基づく補正を行ったが、本応用例1においては、図6に示す駆動力伝達モデルを想定して駆動力推定値の補正を行う。
図6は、本応用例1において想定する駆動力伝達モデルを示す図である。
図6に示すモデルでは、左後輪の駆動モータのみがトルクを出力したとき、車体速Vは左右の駆動輪の車輪速の平均値であると想定しており、このとき、以下の(11)式が成立する。
この作用を考慮すると、左右後輪の駆動を表す運動方程式は以下のようになる。
このように各輪ごとに独立した駆動力推定によって算出した推定駆動力を用いて、駆動輪間の相互作用を考慮した推定駆動力は、以下の(16)、(17)式のように表される。
このように、本応用例1においては、駆動力相互作用調整部104は、各輪駆動力推定部103RL,103RRにおいて推定された駆動力を(16)、(17)式によって補正する。本応用例1における駆動力補正方法では、車体速Vを左右後輪の車輪速の平均値と想定したため、(16)、(17)式においては、車体速を要素として含まない補正式が得られており、上記実施形態の場合に比べ、比較的簡単かつ、より正確に駆動力推定値の補正値を演算することができる。
なお、(16)、(17)式を整理すると、(18)式のように表される。
図7において、第3段のブロック以外の部分は、第1実施形態における図5に示す場合と同様である。
第3段のブロックでは、ローパスフィルタ通過後の左右輪の駆動力推定値から、(18)式に従って、駆動輪間の相互作用を考慮した補正が行われる。
本応用例2においては、図8に示す駆動力伝達モデルを想定して駆動力推定値の補正を行う。
図8は、本応用例2において想定する駆動力伝達モデルを示す図である。
図8に示すモデルでは、左後輪の駆動モータのみがトルクを出力したとき、車体速Vおよび左右後輪の車輪速それぞれを近似することなく補正に反映させており、このとき、以下の(19)式が成立する。
この作用を考慮すると、左右後輪の駆動を表す運動方程式は以下のようになる。
このように、各輪ごとに独立した駆動力推定によって算出した推定駆動力を用いて、駆動輪間の相互作用を考慮した推定駆動力は、以下の(24)、(25)式のように表される。
このように、本応用例2においては、駆動力相互作用調整部104は、各輪駆動力推定部103RL,103RRにおいて推定された駆動力を(24)、(25)式によって補正する。本応用例2における駆動力推定方法では、車体速Vおよび左右後輪の車輪速それぞれを近似することなく補正に反映させることとしたため、上記実施形態の場合に比べ、より正確に駆動力推定値の補正値を演算することができる。
なお、(24)、(25)式を整理すると、(26)式のように表される。
図9において、第3段のブック以外の部分は、第1実施形態における図5に示す場合と同様である。
第3段のブロックでは、ローパスフィルタ通過後の左右輪の駆動力推定値から、(26)式に従って、駆動輪間の相互作用を考慮した補正が行われる。
(1)本発明に係る電動車両の駆動力推定装置によれば、駆動力推定手段が、駆動輪の回転状態と駆動モータの出力とに基づいて、駆動輪が他の車輪を回転させる作用による駆動力成分を算入して各駆動輪における駆動力を推定するので、駆動輪相互の影響を反映させて駆動力を推定することができ、1つの車両に複数の駆動輪がある場合でも、電動車両における駆動力をより正確に推定することができる。
(3)各輪駆動力推定手段が、一の駆動輪に入力された駆動モータの出力のうち、その駆動輪を回転させる力を除いた出力から、その駆動輪における駆動力の概算値(第1の駆動力)を算出し、駆動力相互作用調整手段が、その概算値のうち、駆動輪相互が互いを回転させる作用を反映させる補正を行うので、駆動輪に働く作用を適確に反映することができ、電動車両における駆動力をより正確に推定することができる。
(5)駆動力相互作用調整手段が、(18)式に対応する補正式によって、第1の駆動力を補正するので、比較的簡単に、かつ、より正確に駆動力の補正を行うことができる。
(6)駆動力相互作用調整手段が、(26)式に対応する補正式によって、第1の駆動力を補正するので、より正確に駆動力の補正を行うことができる。
次に、本発明の第2実施形態について説明する。
本実施形態における自動車1の構成は、第1実施形態における図1と同様であるため図1を参照することとし、異なる部分である制御系統の機能構成および駆動力推定処理について説明する。
図10は、本実施形態の自動車1における制御系統の機能構成を示すブロック図である。
図10において、運転操作量検出部201および駆動力相互作用調整部202以外の部分は、図2に示す第1実施形態の場合と同様である。したがって、同様の部分については図2における対応部分の説明を参照することとし、異なる部分である運転操作量検出部201および駆動力相互作用調整部202についてのみ説明する。
駆動力相互作用調整部202は、各輪駆動力推定部103RL,103RRによって推定された駆動モータ3RL,3RRそれぞれの駆動力および運転操作量検出部201の検出結果を基に、後述する補正方法に従って、各駆動輪間における駆動力の相互作用を反映させて各駆動輪の駆動力を補正し、補正後の各輪の駆動力を各輪駆動力推定値出力部105RL,105RRにそれぞれ出力する。
次に、本実施形態における駆動輪間の相互作用に基づく駆動力の補正方法について説明する。
本実施形態においては、駆動輪が操向輪である場合を想定し、駆動輪間の相互作用に基づく駆動力の補正を行う。
図11は、操向輪の転舵角と車体スリップ角との関係を示す図である。
図11においては、左右の前輪が操向輪であると共に駆動輪となっており、この場合、左右前輪の一方が出力した駆動力のうち、車両の推進に使われる力は、以下の(27)式のようになる。
このように、駆動力相互作用調整部202においては、各輪駆動力推定部103RL,103RRで推定された駆動力を(29)式によって変換した後、第1実施形態の(8),(9)式によって補正する。そのため、駆動輪が複数あり、それらの中に操向輪が含まれている場合にも、駆動輪間の相互作用を考慮して駆動力を推定することができる。
図12は、本実施形態における駆動力推定処理を示すフローチャートである。
図12において、ステップS101,S102の処理は、図4に示す駆動力推定処理のステップS1,S2の処理と同様である。
ステップS102の後、駆動力相互作用調整部202は、運転操作量検出部201によって検出された操舵角を基に操向輪の転舵角を取得する(ステップS103)。
そして、駆動力相互作用調整部202は、ステップS103において取得した転舵角を基に、各駆動輪の相互作用による力を(29)式に従って算出し、算出した力を(8),(9)式に代入することにより、駆動輪間の相互作用を考慮して補正された推定駆動力を算出する(ステップS104)。
その後、ステップS101に戻り、駆動力推定処理が繰り返される。
ここで、駆動力相互作用調整部202は、駆動輪のスリップ状態を検出している場合には、ステップS103以降の処理をスキップし、各輪駆動力推定部103RL,103RRによる駆動力の推定結果をそのまま各輪駆動力推定値出力部105RL,105RRに出力する。
また、駆動輪がスリップ状態であるときには、駆動輪間の相互作用に基づく補正を行うことなく駆動力推定値を出力する。
したがって、スリップ状態にある駆動輪の作用を反映することにより、駆動力推定値の精度が低下することを防止できる。
上記実施形態2において、駆動輪が操向輪である場合に、転舵角による影響を反映させて、駆動輪相互の影響を加味した駆動力を推定する考え方について説明したが、このような考え方を用いると、操向輪および非操向輪それぞれが駆動輪である車両(四輪駆動車等)においても、本発明を適用することができる。
具体的には、(29)式において、δ2=0とすることで、操向輪である駆動輪が非操向輪である駆動輪に作用する力を算出でき、δ1=0とすることで、非操向輪である駆動輪が操向輪である駆動輪に作用する力を算出できる。
したがって、(30)式は以下の(31)式のように書き換えられる。
この作用を考慮すると、四輪駆動の場合の運動方程式は以下のようになる。
このように各輪ごとに独立した駆動力推定によって算出した推定駆動力を用いて、駆動輪間の相互作用を考慮した推定駆動力は、以下の(36)〜(39)式のように表される。
(1)操向輪である駆動輪の転舵角の影響を反映して、各駆動輪における駆動力の補正が行われるので、駆動輪が転舵される状況においても、電動車両の駆動力をより正確に推定することができる。
(2)非操向輪である駆動輪の駆動力を、Fd2・cos(δ1−β)cosβ(ただし、δ1は一の駆動輪の転舵角、βは車両の走行方向に対するスリップ角)なる変換式を用いて変換し、操向輪である駆動輪の駆動力を補正するので、非操向輪である駆動輪から操向輪である駆動輪への作用を適確に反映して、電動車両の駆動力をより正確に推定することができる。
(6)一の駆動輪と他の複数の駆動輪それぞれとの間において算出した補正量を線形和として結合することにより、各駆動輪における駆動力を推定するので、駆動輪が複数備えられている場合に、駆動輪相互の作用を適確に反映して各駆動輪における駆動力を推定することができる。
Claims (14)
- 駆動輪を駆動する駆動モータと、
駆動輪の回転状態を検出する回転状態検出手段と、
駆動輪それぞれに入力される前記駆動モータの出力を検出するモータ出力検出手段と、
前記回転状態検出手段によって検出された駆動輪の回転状態と、前記モータ出力検出手段によって検出された駆動モータの出力とに基づいて、一の駆動輪が他の車輪を回転させる作用による駆動力成分を算入して各駆動輪における駆動力を推定する駆動力推定手段と、
を備えることを特徴とする電動車両の駆動力推定装置。 - 前記駆動力推定手段は、一の駆動輪に入力された前記駆動モータの出力を、該一の駆動輪を回転させる力と、他の車輪を回転させる力と、車両を推進させる力とに配分することにより、各駆動輪における駆動力を推定することを特徴とする請求項1記載の電動車両の駆動力推定装置。
- 前記駆動力推定手段は、
一の駆動輪に入力された前記駆動モータの出力と、該一の駆動輪の前記回転状態とに基づいて、入力された前記駆動モータの出力のうち該一の駆動輪を回転させるための成分以外から、該一の駆動輪における第1の駆動力を推定する各輪駆動力推定手段と、
前記各輪駆動力推定手段によって推定された第1の駆動力に対し、該一の駆動輪と他の駆動輪とが互いを回転させる作用に基づく補正を行う駆動力相互作用調整手段と、
を備えることを特徴とする請求項1または2記載の電動車両の駆動力推定装置。 - 前記駆動力相互作用調整手段は、次式に基づいて第1の駆動力を補正することを特徴とする請求項3記載の電動車両の駆動力推定装置。
- 前記駆動力相互作用調整手段は、次式に基づいて第1の駆動力を補正することを特徴とする請求項3記載の電動車両の駆動力推定装置。
- 前記駆動力相互作用調整手段は、次式に基づいて第1の駆動力を補正することを特徴とする請求項3記載の電動車両の駆動力推定装置。
- 前記駆動力相互作用調整手段は、駆動輪が操向輪である場合、その転舵角に基づいて、各駆動輪における駆動力の補正を行うことを特徴とする請求項1から6のいずれか1項に記載の電動車両の駆動力推定装置。
- 前記駆動力相互作用調整手段は、一の駆動輪が操向輪である場合、非操向輪である他の駆動輪の前記第1の駆動力Fd2をFd2・cos(δ1−β)cosβ(ただし、δ1は一の駆動輪の転舵角、βは車両の走行方向に対するスリップ角)と変換した上で、該一の駆動輪と他の駆動輪が互いを回転させる作用に基づく前記補正を行うことを特徴とする請求項4から6のいずれか1項に記載の電動車両の駆動力推定装置。
- 前記駆動力相互作用調整手段は、一の駆動輪が非操向輪である場合、操向輪である他の駆動輪の前記第1の駆動力Fd2をFd2・cos(δ2−β)cosβ(ただし、δ2は他の駆動輪の転舵角、βは車両の走行方向に対するスリップ角)と変換した上で、該一の駆動輪と他の駆動輪が互いを回転させる作用に基づく前記補正を行うことを特徴とする請求項4から6のいずれか1項に記載の電動車両の駆動力推定装置。
- 前記駆動力相互作用調整手段は、一の駆動輪が操向輪である場合、操向輪である他の駆動輪の前記第1の駆動力Fd2をFd2・cos(δ1−β)cos(δ2−β)(ただし、δ1は一の駆動輪の転舵角、δ2は他の駆動輪の転舵角、βは車両の走行方向に対するスリップ角)と変換した上で、該一の駆動輪と他の駆動輪が互いを回転させる作用に基づく前記補正を行うことを特徴とする請求項4から6のいずれか1項に記載の電動車両の駆動力推定装置。
- 車両に入力された運転操作量を検出する運転操作量検出手段をさらに備え、
前記駆動力推定手段は、前記回転状態検出手段によって検出された駆動輪の回転状態と、前記モータ出力検出手段によって検出された駆動モータの出力と、前記運転操作量検出手段によって検出された運転操作量とに基づいて、駆動輪におけるスリップの発生を検出し、駆動輪においてスリップが発生している場合、一の駆動輪が他の車輪を回転させる作用による駆動力成分を算入することなく、一の駆動輪に入力された前記駆動モータの出力を、該一の駆動輪を回転させる力と、車両を推進させる力とに配分することにより、各駆動輪における駆動力を推定することを特徴とする請求項1から10のいずれか1項に記載の電動車両の駆動力推定装置。 - 前記駆動力推定手段は、車両に備えられた一の駆動輪と他の複数の駆動輪それぞれとの間において、駆動輪が互いを回転させる作用に基づく補正量を算出し、算出した補正量を線形和として結合することにより、各駆動輪における駆動力を推定することを特徴とする請求項1から11のいずれか1項に記載の電動車両の駆動力推定装置。
- 複数の駆動輪と、
車体に設置されたアクセルペダルと、
前記アクセルペダルの操作量に基づいて、車両の駆動制御を行う駆動制御手段と、
前記駆動制御手段の制御に従って、駆動輪を駆動する駆動モータと、
駆動輪の回転状態を検出する回転状態検出手段と、
駆動輪それぞれに入力される前記駆動モータの出力を検出するモータ出力検出手段と、
前記回転状態検出手段によって検出された駆動輪の回転状態と、前記モータ出力検出手段によって検出された駆動モータの出力とに基づいて、一の駆動輪が他の車輪を回転させる作用による駆動力成分を算入して各駆動輪における駆動力を推定する駆動力推定手段と、
を備えることを特徴とする自動車。 - 駆動輪の回転状態および駆動モータの出力に基づいて、駆動輪が他の車輪を回転させる作用を反映させて各駆動輪における駆動力を推定することを特徴とする電動車両の駆動力推定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006165139A JP4725431B2 (ja) | 2006-06-14 | 2006-06-14 | 電動車両の駆動力推定装置、自動車および電動車両の駆動力推定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006165139A JP4725431B2 (ja) | 2006-06-14 | 2006-06-14 | 電動車両の駆動力推定装置、自動車および電動車両の駆動力推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007336679A true JP2007336679A (ja) | 2007-12-27 |
| JP4725431B2 JP4725431B2 (ja) | 2011-07-13 |
Family
ID=38935607
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006165139A Expired - Fee Related JP4725431B2 (ja) | 2006-06-14 | 2006-06-14 | 電動車両の駆動力推定装置、自動車および電動車両の駆動力推定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4725431B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014162462A1 (ja) * | 2013-04-01 | 2014-10-09 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| WO2014162443A1 (ja) * | 2013-04-01 | 2014-10-09 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| WO2014188489A1 (ja) * | 2013-05-20 | 2014-11-27 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| US9145287B2 (en) | 2013-02-15 | 2015-09-29 | Sumitomo Heavy Industries, Ltd. | Motor drive apparatus for electric forklift and electric forklift adopting the same |
| WO2023119407A1 (ja) * | 2021-12-21 | 2023-06-29 | ヤマハ発動機株式会社 | 駆動操舵制御システム、組込式駆動操舵ユニットシステム、組込式駆動操舵ユニット及び自動運転地上車両 |
| JP2023169608A (ja) * | 2022-05-17 | 2023-11-30 | 株式会社Subaru | 駆動力推定装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02133006A (ja) * | 1988-11-09 | 1990-05-22 | Aisin Aw Co Ltd | 電動車両 |
| JP2004096932A (ja) * | 2002-09-03 | 2004-03-25 | Hitachi Ltd | ハイブリッド車の制御装置 |
| JP2005354762A (ja) * | 2004-06-08 | 2005-12-22 | Nissan Motor Co Ltd | 車両の旋回制御装置 |
| JP2007209068A (ja) * | 2006-01-31 | 2007-08-16 | Nissan Motor Co Ltd | 電動車両の駆動力制御装置、自動車及び電動車両の駆動力制御方法 |
-
2006
- 2006-06-14 JP JP2006165139A patent/JP4725431B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02133006A (ja) * | 1988-11-09 | 1990-05-22 | Aisin Aw Co Ltd | 電動車両 |
| JP2004096932A (ja) * | 2002-09-03 | 2004-03-25 | Hitachi Ltd | ハイブリッド車の制御装置 |
| JP2005354762A (ja) * | 2004-06-08 | 2005-12-22 | Nissan Motor Co Ltd | 車両の旋回制御装置 |
| JP2007209068A (ja) * | 2006-01-31 | 2007-08-16 | Nissan Motor Co Ltd | 電動車両の駆動力制御装置、自動車及び電動車両の駆動力制御方法 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9145287B2 (en) | 2013-02-15 | 2015-09-29 | Sumitomo Heavy Industries, Ltd. | Motor drive apparatus for electric forklift and electric forklift adopting the same |
| WO2014162462A1 (ja) * | 2013-04-01 | 2014-10-09 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| WO2014162443A1 (ja) * | 2013-04-01 | 2014-10-09 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| US9421882B2 (en) | 2013-04-01 | 2016-08-23 | Pioneer Corporation | Traction control device and traction control method |
| JP5994192B2 (ja) * | 2013-04-01 | 2016-09-21 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| JPWO2014162462A1 (ja) * | 2013-04-01 | 2017-02-16 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| WO2014188489A1 (ja) * | 2013-05-20 | 2014-11-27 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| JP5994194B2 (ja) * | 2013-05-20 | 2016-09-21 | パイオニア株式会社 | トラクション制御装置及びトラクション制御方法 |
| WO2023119407A1 (ja) * | 2021-12-21 | 2023-06-29 | ヤマハ発動機株式会社 | 駆動操舵制御システム、組込式駆動操舵ユニットシステム、組込式駆動操舵ユニット及び自動運転地上車両 |
| JPWO2023119407A1 (ja) * | 2021-12-21 | 2023-06-29 | ||
| JP2023169608A (ja) * | 2022-05-17 | 2023-11-30 | 株式会社Subaru | 駆動力推定装置 |
| JP7850006B2 (ja) | 2022-05-17 | 2026-04-22 | 株式会社Subaru | 駆動力推定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4725431B2 (ja) | 2011-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4778080B2 (ja) | タイヤ状態推定装置及びタイヤ状態推定方法 | |
| JP3046108B2 (ja) | 差動制限装置付き車両の舵力制御方法 | |
| CN107848526B (zh) | 车辆转弯控制装置 | |
| WO2003095261A1 (en) | Method and device for controlling vehicle | |
| WO2006083008A1 (ja) | 車輌の制駆動力制御装置 | |
| US9956891B2 (en) | Electric vehicle | |
| JP4193706B2 (ja) | 路面摩擦係数検出装置 | |
| JP4867369B2 (ja) | 電動車両の駆動力制御装置、自動車及び電動車両の駆動力制御方法 | |
| JP6664885B2 (ja) | 車両の制駆動トルク制御装置 | |
| WO2019102998A1 (ja) | 車両 | |
| JP4513612B2 (ja) | 車両のトルク配分制御装置 | |
| JP6577850B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP3853907B2 (ja) | 電気自動車用駆動制御装置 | |
| JP6267440B2 (ja) | 車両制御装置 | |
| JP4423961B2 (ja) | 電動車両のモータ出力制御装置 | |
| JP4725431B2 (ja) | 電動車両の駆動力推定装置、自動車および電動車両の駆動力推定方法 | |
| JP3451869B2 (ja) | 電気自動車用駆動制御装置 | |
| JP2006187047A (ja) | 4輪独立駆動車の駆動力制御装置 | |
| JP5007549B2 (ja) | タイヤ横力演算装置 | |
| JP4321285B2 (ja) | 車輪の接地荷重推定装置 | |
| JP2008295244A (ja) | モータ駆動自動車用駆動制御装置 | |
| JP2016015834A (ja) | 電気自動車のヒルアシスト制御装置 | |
| JP4835198B2 (ja) | 車両の挙動制御装置 | |
| KR100559851B1 (ko) | 하이브리드 전기식 차량의 안정조정장치 | |
| JP2016094139A (ja) | 四輪駆動車両の車両速度推定装置および制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090325 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100917 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110328 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4725431 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140422 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |