JP2007511119A - 正規直交空間−時間変換のリフティングベースの実現 - Google Patents
正規直交空間−時間変換のリフティングベースの実現 Download PDFInfo
- Publication number
- JP2007511119A JP2007511119A JP2006536921A JP2006536921A JP2007511119A JP 2007511119 A JP2007511119 A JP 2007511119A JP 2006536921 A JP2006536921 A JP 2006536921A JP 2006536921 A JP2006536921 A JP 2006536921A JP 2007511119 A JP2007511119 A JP 2007511119A
- Authority
- JP
- Japan
- Prior art keywords
- pixels
- pass data
- predicted
- encoding method
- transformation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
- H04N19/615—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding using motion compensated temporal filtering [MCTF]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/63—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding using sub-band based transform, e.g. wavelets
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/13—Adaptive entropy coding, e.g. adaptive variable length coding [AVLC] or context adaptive binary arithmetic coding [CABAC]
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Abstract
Description
この明細書の開示内容の一部は、著作権保護の対象となるマテリアルを含む。著作権所有者は、この明細書が特許商標庁への特許出願であると認められるファックスコピーに対しては異議を唱えないが、この他のあらゆる全ての著作権を主張する。以下の表示は、後述するソフトウェア及びデータ、並びに添付の図面に適用される。:著作権(c)2004:全ての著作権はソニーエレクトロニクスインク社に帰属する(Copyright (c) 2004, Sony Electronics, Inc., All Rights Reserved)。
Claims (40)
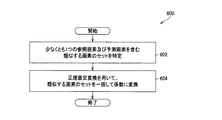
- 少なくとも1つの参照画素及び複数の予測画素を含む画素のセットを、正規直交変換を用いて、ハイパスデータに一括して変換するステップと、
上記少なくとも1つの参照画素及びハイパスデータを用いてローパスデータを生成するステップとを有する符号化方法。 - 上記画素のセットは、動き推定処理によって定義されることを特徴とする請求項1記載の符号化方法。
- 上記ハイパスデータは、ハイパス係数のセットを含み、上記ローパスデータは、ローパス係数を含むことを特徴とする請求項2記載の符号化方法。
- 上記正規直交変換は、変換行列であることを特徴とする請求項1記載の符号化方法。
- 上記変換行列は、複数の予測画素の数をnとして、(n+1)×(n+1)のサイズを有することを特徴とする請求項4記載の符号化方法。
- 上記画素のセットは、マルチ連結画素を含むことを特徴とする請求項2記載の符号化方法。
- 上記少なくとも1つの参照画素は、参照フレームに由来し、上記複数の予測画素は、予測されているフレームに由来することを特徴とする請求項2記載の符号化方法。
- 画素のセットを定義するステップを更に有する請求項1記載の符号化方法。
- 上記少なくとも1つの参照画素及び上記複数の予測画素は、予測されているフレームに由来することを特徴とする請求項8記載の符号化方法。
- 上記複数の係数は、平均画素値と残差値のセットとを含むことを特徴とする請求項8記載の符号化方法。
- 上記少なくとも1つの参照画素は、2つ以上の参照画素を含むことを特徴とする請求項9記載の符号化方法。
- 上記動き推定処理は、副次的画素補間を利用することを特徴とする請求項2記載の符号化方法。
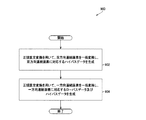
- 正規直交変換を用いて、複数の双方向連結画素を一括して変換し、参照フレームからの参照画素と、予測されたフレームからの予測画素の第1のセットとを含む複数の双方向連結画素に対応するハイパスデータを生成するステップと、
正規直交変換を用いて、複数の一方向連結画素を一括して変換し、参照画素の1つと、予測されたフレームから予測画素の第2のセットとを含む複数の一方向連結画素に対応するローパスデータ及びハイパスデータを生成するステップとを有する符号化方法。 - 上記複数の双方向連結画素及び上記複数の一方向連結画素は、動き推定処理によって定義されることを特徴とする請求項13記載の符号化方法。
- 上記ハイパスデータは、ハイパス係数のセットを含み、上記ローパスデータは、ローパス係数を含むことを特徴とする請求項13記載の符号化方法。
- 上記正規直交変換は、変換行列であることを特徴とする請求項13記載の符号化方法。
- プロセッサにより実行されて、該プロセッサに符号化方法を実行させる命令を提供するコンピュータにより読取可能な媒体において、該符号化方法は、
少なくとも1つの参照画素及び複数の予測画素を含む画素のセットを、正規直交変換を用いて、ハイパスデータに一括して変換するステップと、
上記少なくとも1つの参照画素及びハイパスデータを用いてローパスデータを生成するステップとを有するコンピュータにより読取可能な媒体。 - 上記ハイパスデータは、ハイパス係数のセットを含み、上記ローパスデータは、ローパス係数を含むことを特徴とする請求項17記載のコンピュータにより読取可能な媒体。
- 上記正規直交変換は、変換行列であることを特徴とする請求項17記載のコンピュータにより読取可能な媒体。
- 上記画素のセットは、マルチ連結画素を含むことを特徴とする請求項17記載のコンピュータにより読取可能な媒体。
- 上記少なくとも1つの参照画素は、参照フレームに由来し、上記複数の予測画素は、予測されているフレームに由来することを特徴とする請求項20記載のコンピュータにより読取可能な媒体。
- 上記少なくとも1つの参照画素及び上記複数の予測画素は、予測されているフレームに由来することを特徴とする請求項17記載のコンピュータにより読取可能な媒体。
- 上記複数の係数は、平均画素値と残差値のセットとを含むことを特徴とする請求項22記載のコンピュータにより読取可能な媒体。
- 上記少なくとも1つの参照画素は、2つ以上の参照画素を含むことを特徴とする請求項22記載のコンピュータにより読取可能な媒体。
- プロセッサにより実行されて、該プロセッサに符号化方法を実行させる命令を提供するコンピュータにより読取可能な媒体において、該符号化方法は、
正規直交変換を用いて、複数の双方向連結画素を一括して変換し、参照フレームからの参照画素と、予測されたフレームからの予測画素の第1のセットとを含む複数の双方向連結画素に対応するハイパスデータを生成するステップと、
正規直交変換を用いて、複数の一方向連結画素を一括して変換し、参照画素の1つと、予測されたフレームから予測画素の第2のセットとを含む複数の一方向連結画素に対応するローパスデータ及びハイパスデータを生成するステップとを有するコンピュータにより読取可能な媒体。 - 上記複数の双方向連結画素及び複数の一方向連結画素は、動き推定処理によって定義されることを特徴とする請求項25記載のコンピュータにより読取可能な媒体。
- 上記ハイパスデータは、ハイパス係数のセットを含み、上記ローパスデータは、ローパス係数を含むことを特徴とする請求項25記載のコンピュータにより読取可能な媒体。
- 上記正規直交変換は、変換行列であることを特徴とする請求項25記載のコンピュータにより読取可能な媒体。
- メモリと、
上記メモリに接続された少なくとも1つのプロセッサとを備え、
上記少なくとも1つのプロセッサは、指示のセットを実行することにより、
少なくとも1つの参照画素及び複数の予測画素を含む画素のセットを、正規直交変換を用いて、ハイパスデータに一括して変換し、
上記少なくとも1つの参照画素及びハイパスデータを用いてローパスデータを生成するコンピュータシステム。 - 上記ハイパスデータは、ハイパス係数のセットを含み、上記ローパスデータは、ローパス係数を含むことを特徴とする請求項29記載のコンピュータシステム。
- 上記正規直交変換は、変換行列であることを特徴とする請求項29記載のコンピュータシステム。
- 上記画素のセットは、マルチ連結画素を含むことを特徴とする請求項29記載のコンピュータシステム。
- 上記少なくとも1つの参照画素は、参照フレームに由来し、複数の予測画素は、予測されているフレームに由来することを特徴とする請求項29記載のコンピュータシステム。
- 上記複数の係数は、平均画素値と残差値のセットとを含むことを特徴とする請求項33記載のコンピュータシステム。
- メモリと、
上記メモリに接続された少なくとも1つのプロセッサとを備え、
上記少なくとも1つのプロセッサは、指示のセットを実行することにより、
正規直交変換を用いて、複数の双方向連結画素を一括して変換し、参照フレームからの参照画素と、予測されたフレームからの予測画素の第1のセットとを含む複数の双方向連結画素に対応するハイパスデータを生成し、
正規直交変換を用いて、複数の一方向連結画素を一括して変換し、参照画素の1つと、予測されたフレームから予測画素の第2のセットとを含む複数の一方向連結画素に対応するローパスデータ及びハイパスデータを生成するコンピュータシステム。 - 上記複数の双方向連結画素及び複数の一方向連結画素は、動き推定処理によって定義されることを特徴とする請求項35記載のコンピュータシステム。
- 上記ハイパスデータは、ハイパス係数のセットを含み、上記ローパスデータは、ローパス係数を含むことを特徴とする請求項35記載のコンピュータシステム。
- 上記正規直交変換は、変換行列であることを特徴とする請求項35記載のコンピュータシステム。
- 少なくとも1つの参照画素及び複数の予測画素を含む画素のセットを、正規直交変換を用いて、ハイパスデータに一括して変換する変換手段と、
上記少なくとも1つの参照画素及びハイパスデータを用いてローパスデータを生成する生成手段とを備える符号化装置。 - 正規直交変換を用いて、複数の双方向連結画素を一括して変換し、参照フレームからの参照画素と、予測されたフレームからの予測画素の第1のセットとを含む複数の双方向連結画素に対応するハイパスデータを生成する生成手段と、
正規直交変換を用いて、複数の一方向連結画素を一括して変換し、参照画素の1つと、予測されたフレームから予測画素の第2のセットとを含む複数の一方向連結画素に対応するローパスデータ及びハイパスデータを生成する生成手段とを備える符号化装置。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US51435103P | 2003-10-24 | 2003-10-24 | |
| US51434203P | 2003-10-24 | 2003-10-24 | |
| US51813503P | 2003-11-07 | 2003-11-07 | |
| US52341103P | 2003-11-18 | 2003-11-18 | |
| US10/971,896 US7526025B2 (en) | 2003-10-24 | 2004-10-22 | Lifting-based implementations of orthonormal spatio-temporal transformations |
| PCT/US2004/035403 WO2005041554A2 (en) | 2003-10-24 | 2004-10-25 | Lifting-based implementations of orthonormal spatio-temporal transformations |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007511119A true JP2007511119A (ja) | 2007-04-26 |
Family
ID=34528380
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006536921A Pending JP2007511119A (ja) | 2003-10-24 | 2004-10-25 | 正規直交空間−時間変換のリフティングベースの実現 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US7526025B2 (ja) |
| EP (1) | EP1683340B1 (ja) |
| JP (1) | JP2007511119A (ja) |
| KR (1) | KR101045650B1 (ja) |
| CN (1) | CN1947346B (ja) |
| WO (1) | WO2005041554A2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1868214A (zh) * | 2003-10-10 | 2006-11-22 | 皇家飞利浦电子股份有限公司 | 3d视频可缩放视频编码方法 |
| EP1599046A1 (en) * | 2004-05-19 | 2005-11-23 | THOMSON Licensing | Method for coding video data of a sequence of pictures |
| KR20060043867A (ko) * | 2004-09-23 | 2006-05-15 | 엘지전자 주식회사 | 영상 신호의 인코딩 및 디코딩 방법 |
| KR101365575B1 (ko) * | 2007-02-05 | 2014-02-25 | 삼성전자주식회사 | 인터 예측 부호화, 복호화 방법 및 장치 |
| US8705627B2 (en) * | 2008-07-25 | 2014-04-22 | Sony Corporation | Image processing apparatus and method |
| US20100245672A1 (en) * | 2009-03-03 | 2010-09-30 | Sony Corporation | Method and apparatus for image and video processing |
| US9973780B2 (en) * | 2013-10-31 | 2018-05-15 | Microsoft Technology Licensing, Llc | Scaled video for pseudo-analog transmission in spatial domain |
| US20190273946A1 (en) * | 2018-03-05 | 2019-09-05 | Markus Helmut Flierl | Methods and Arrangements for Sub-Pel Motion-Adaptive Image Processing |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000003449A (ja) * | 1998-04-14 | 2000-01-07 | Matsushita Joho System Kk | 画像整合性判定装置 |
| JP2000316174A (ja) * | 1999-04-30 | 2000-11-14 | Ricoh Co Ltd | カラー画像圧縮方法およびカラー画像圧縮装置 |
| JP2002532026A (ja) * | 1998-11-30 | 2002-09-24 | マイクロソフト コーポレイション | 動き推定とブロックマッチング・パターンの改良 |
| JP2003142989A (ja) * | 2001-10-31 | 2003-05-16 | Canon Inc | フィルタ処理装置およびフィルタ処理方法 |
| JP2003274411A (ja) * | 2002-03-14 | 2003-09-26 | Matsushita Electric Ind Co Ltd | 画像符号化方法および画像復号方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5398078A (en) | 1991-10-31 | 1995-03-14 | Kabushiki Kaisha Toshiba | Method of detecting a motion vector in an image coding apparatus |
| WO1994023385A2 (en) | 1993-03-30 | 1994-10-13 | Adrian Stafford Lewis | Data compression and decompression |
| US5611822A (en) * | 1993-05-10 | 1997-03-18 | Allegro Natural Dyes Llc | Indigo dye process |
| JPH0738760A (ja) | 1993-06-28 | 1995-02-07 | Nec Corp | 直交変換基底生成方式 |
| US5621660A (en) | 1995-04-18 | 1997-04-15 | Sun Microsystems, Inc. | Software-based encoder for a software-implemented end-to-end scalable video delivery system |
| US5764814A (en) | 1996-03-22 | 1998-06-09 | Microsoft Corporation | Representation and encoding of general arbitrary shapes |
| US6310972B1 (en) * | 1996-06-28 | 2001-10-30 | Competitive Technologies Of Pa, Inc. | Shape adaptive technique for image and video compression |
| ATE209423T1 (de) | 1997-03-14 | 2001-12-15 | Cselt Centro Studi Lab Telecom | Schaltung zur bewegungsschätzung in codierern für digitalisierte videosequenzen |
| US6430317B1 (en) | 1997-12-31 | 2002-08-06 | Sarnoff Corporation | Method and apparatus for estimating motion using block features obtained from an M-ary pyramid |
| US6122017A (en) * | 1998-01-22 | 2000-09-19 | Hewlett-Packard Company | Method for providing motion-compensated multi-field enhancement of still images from video |
| US6628714B1 (en) * | 1998-12-18 | 2003-09-30 | Zenith Electronics Corporation | Down converting MPEG encoded high definition sequences to lower resolution with reduced memory in decoder loop |
| JP2003530789A (ja) | 2000-04-11 | 2003-10-14 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | ビデオ符号化及び復号方法 |
| US6597739B1 (en) | 2000-06-20 | 2003-07-22 | Microsoft Corporation | Three-dimensional shape-adaptive wavelet transform for efficient object-based video coding |
| US7023923B2 (en) | 2002-04-29 | 2006-04-04 | Koninklijke Philips Electronics N.V. | Motion compensated temporal filtering based on multiple reference frames for wavelet based coding |
| US7627037B2 (en) * | 2004-02-27 | 2009-12-01 | Microsoft Corporation | Barbell lifting for multi-layer wavelet coding |
-
2004
- 2004-10-22 US US10/971,896 patent/US7526025B2/en not_active Expired - Fee Related
- 2004-10-25 EP EP04796391.3A patent/EP1683340B1/en not_active Expired - Lifetime
- 2004-10-25 WO PCT/US2004/035403 patent/WO2005041554A2/en not_active Ceased
- 2004-10-25 CN CN2004800387235A patent/CN1947346B/zh not_active Expired - Fee Related
- 2004-10-25 KR KR1020067007505A patent/KR101045650B1/ko not_active Expired - Fee Related
- 2004-10-25 JP JP2006536921A patent/JP2007511119A/ja active Pending
-
2009
- 2009-03-16 US US12/405,179 patent/US8379717B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000003449A (ja) * | 1998-04-14 | 2000-01-07 | Matsushita Joho System Kk | 画像整合性判定装置 |
| JP2002532026A (ja) * | 1998-11-30 | 2002-09-24 | マイクロソフト コーポレイション | 動き推定とブロックマッチング・パターンの改良 |
| JP2000316174A (ja) * | 1999-04-30 | 2000-11-14 | Ricoh Co Ltd | カラー画像圧縮方法およびカラー画像圧縮装置 |
| JP2003142989A (ja) * | 2001-10-31 | 2003-05-16 | Canon Inc | フィルタ処理装置およびフィルタ処理方法 |
| JP2003274411A (ja) * | 2002-03-14 | 2003-09-26 | Matsushita Electric Ind Co Ltd | 画像符号化方法および画像復号方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1947346A (zh) | 2007-04-11 |
| CN1947346B (zh) | 2012-04-25 |
| KR101045650B1 (ko) | 2011-07-01 |
| KR20060095760A (ko) | 2006-09-01 |
| WO2005041554A3 (en) | 2006-09-21 |
| US20090175348A1 (en) | 2009-07-09 |
| US7526025B2 (en) | 2009-04-28 |
| EP1683340B1 (en) | 2017-08-30 |
| EP1683340A4 (en) | 2010-03-03 |
| WO2005041554A2 (en) | 2005-05-06 |
| US8379717B2 (en) | 2013-02-19 |
| EP1683340A2 (en) | 2006-07-26 |
| US20050117638A1 (en) | 2005-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5467141B2 (ja) | 下層のフィルタリングを備えたスケーラブルビデオ符号化 | |
| CN107318026B (zh) | 视频编码器以及视频编码方法 | |
| US20130101040A1 (en) | Method for coding a block of a sequence of images and method for reconstructing said block | |
| CA2692250C (en) | Video encoding and decoding methods using residual prediction, and corresponding apparatuses | |
| JPS62203496A (ja) | 動画像信号の高能率符号化方式 | |
| CN101816183A (zh) | 使用子像素运动估计对图像进行帧间预测编码/解码的方法和设备 | |
| JP2006246474A5 (ja) | ||
| JP2008306719A (ja) | インターカラー補償を利用した映像の符号化方法及び装置、復号化方法及び装置 | |
| CN102752593A (zh) | 估计运动矢量的方法和设备,编码器/解码器和解码方法 | |
| US8379717B2 (en) | Lifting-based implementations of orthonormal spatio-temporal transformations | |
| CN100411441C (zh) | 用于三维子带视频编码的方法和设备 | |
| JP2007523512A (ja) | 量子化雑音伝搬現象を抑制するための最適な空間−時間変換 | |
| JP5598199B2 (ja) | 動画像符号化装置 | |
| JP5938424B2 (ja) | 画像ブロックを再構成および符号化する方法 | |
| US9094686B2 (en) | Systems and methods for faster throughput for compressed video data decoding | |
| JPH10150665A (ja) | 予測画像の作成方法及び画像符号化方法及び画像符号化装置 | |
| JP2007517438A (ja) | 参照フレームの数を固定する符号化方式で画像の参照ブロックを取得する方法 | |
| JP5533885B2 (ja) | 動画像符号化装置および動画像復号装置 | |
| JP4253572B2 (ja) | 画像符号化装置、画像符号化方法および画像符号化プログラム | |
| JPH10145793A (ja) | 画像符号化装置とその方法、および、画像復号化装置とその方法 | |
| JP2008005546A (ja) | 予測画像の作成方法及び画像符号化方法及び画像符号化装置 | |
| WO2019187396A1 (ja) | 画像復号装置、画像符号化装置、画像処理システム、画像復号方法及びプログラム | |
| WO2016017338A1 (ja) | 動画像符号化装置及び動画像復号装置並びに動画像符号化・復号方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070820 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20080604 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20080604 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101101 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110201 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110208 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110224 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110303 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110401 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110502 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110719 |