JP2007520002A - 能動外観モデルを画像解析へ応用するシステム及び方法 - Google Patents
能動外観モデルを画像解析へ応用するシステム及び方法 Download PDFInfo
- Publication number
- JP2007520002A JP2007520002A JP2006549798A JP2006549798A JP2007520002A JP 2007520002 A JP2007520002 A JP 2007520002A JP 2006549798 A JP2006549798 A JP 2006549798A JP 2006549798 A JP2006549798 A JP 2006549798A JP 2007520002 A JP2007520002 A JP 2007520002A
- Authority
- JP
- Japan
- Prior art keywords
- model
- output
- image
- shape
- objects
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/149—Segmentation; Edge detection involving deformable models, e.g. active contour models
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
- G06T7/251—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments involving models
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/755—Deformable models or variational models, e.g. snakes or active contours
- G06V10/7557—Deformable models or variational models, e.g. snakes or active contours based on appearance, e.g. active appearance models [AAM]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Health & Medical Sciences (AREA)
- Multimedia (AREA)
- Evolutionary Computation (AREA)
- Databases & Information Systems (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
デジタル画像を解釈する統計外観モデルを有する画像処理システム及び方法。外観モデルは少なくとも1つのモデル・パラメータを有する。システム及び方法は2次元の第1のモデル・オブジェクトを含み、該第1のモデル・オブジェクトは、関連した第1の統計関係を含む。第1のモデル・オブジェクトは変形して、デジタル画像の中の2次元の第1のターゲット・オブジェクトの形状及びテクスチャに近似するように構成される。更に、第1のモデル・オブジェクトを選択して画像へ適用し、第1のターゲット・オブジェクトの形状及びテクスチャに近似する2次元の第1の出力オブジェクトを生成するサーチ・モジュールが含まれる。サーチ・モジュールは、第1の出力オブジェクトと第1のターゲット・オブジェクトとの間の第1の誤差を計算する。更に、第1の出力オブジェクトを表すデータを出力へ提供する出力モジュールが含まれる。処理システムは補間を使用して画像の区分を改善し、また様々なターゲット・オブジェクト構成のために最適化された複数のモデルを使用する。更に、モデル・パラメータに関連づけられるモデル・ラベリングが含まれ、ラベリングは解の画像に帰せられて、患者の診断を助けるようにする。
Description
本発明は、一般的に、統計モデルを使用した画像解析に関する。
形状及び外観の統計モデルは、デジタル画像を解釈する強力なツールである。変形可能な統計モデルは、顔の認識、工業製品の検査、及び医療画像の解釈を含む多くの分野で使用されてきた。変形可能なモデル、例えば、能動形状モデル(Active Shape Models)及び能動外観モデル(Active Appearance Models)は、ノイズがあり及び分解能の困難性を含む複雑で変動し得る構造を有する画像へ適用可能である。一般的に、形状モデルは画像内のターゲット・オブジェクトの境界へオブジェクト・モデルをマッチさせるが、外観モデルはモデル・パラメータを使用し、形状及びテクスチャの双方を使用して完全な画像マッチを合成し、画像からターゲット・オブジェクトを識別及び再生する。
形状及び外観の3次元統計モデル、例えば、コンピュータ映像ヨーロッパ会議(European Conference on Computer Vision)におけるCootesらの能動外観モデルは、医療画像の解釈へ応用されてきたが、生物学的構造に存在する個人間及び個人内の変動性は画像の解釈を困難にする。医療画像の解釈における多くの応用は、画像構造の処理及び解析を取り扱う能力を有する自動化システムを必要とする。医療画像は、典型的に、同一でないオブジェクトのクラスを有し、したがって変形可能なモデルは、表現するオブジェクトのクラスの本質的特性を維持する必要があるが、変形して特定範囲のオブジェクトの例を当て嵌めることもできる。一般的に、モデルは、モデル・オブジェクトが表現するオブジェクト・クラスの有効なターゲット・オブジェクトを妥当及び正当に生成できなければならない。しかし、現在のモデル・システムは、モデル化されたオブジェクト・クラスによって表される画像内のターゲット・オブジェクトの存在を検証しない。現在のモデル・システムの更なる欠点は、特定の画像で使用する最良モデルを識別しないことである。例えば、医療撮像の応用において、要件は病理解剖を区分することである。病理解剖は、生理解剖よりも著しく多様な変動性を有する。病理解剖の全ての変動性を1つの代表的なモデルへモデル化するときの重要な副作用は、モデル・オブジェクトが間違った形状を「学習」し、結果として最適でない解を発見することである。これは、モデル・オブジェクトの生成の間に、例示的トレーニング画像に基づく一般化ステップが存在し、モデル・オブジェクトが、現実に存在しない可能性のある例示的形状を学習する事実によって起こる。
現在のモデル・システムの他の欠点は、画像の再生されたターゲット・オブジェクトが空間的及び/又は時間的に不均一に分布すること、及び画像内で識別されたターゲット・オブジェクトの病理を決定する支援が欠乏していることである。
本発明の目的は、変形可能な統計モデルによって前記の欠点の少なくとも幾つかを除去又は軽減する画像解釈システム及び方法を提供することである。
本発明によれば、デジタル画像を解釈する統計外観モデルを有し、該外観モデルが少なくとも1つのモデル・パラメータを有する画像処理システムが提供される。このシステムは、関連した第1の統計関係を含み、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第1のモデル・オブジェクト、関連した第2の統計関係を含み、変形してデジタル画像の中のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第2のモデル・オブジェクトであって第1のモデル・オブジェクトとは異なる形状及びテクスチャの構成を有する第2のモデル・オブジェクト、第1のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第1の出力オブジェクトを生成し、第1の出力オブジェクトとターゲット・オブジェクトとの間の第1の誤差を計算し、第2のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第2の出力オブジェクトを生成し、第2の出力オブジェクトとターゲット・オブジェクトとの間の第2の誤差を計算するサーチ・モジュール、第1の誤差と第2の誤差とを比較して、最小有意誤差を有する出力オブジェクトの1つが選択されるようにする選択モジュール、及び選択された出力オブジェクトを表すデータを出力へ提供する出力モジュールを備える。
本発明の更なる様相によれば、デジタル画像のシーケンスを解釈する統計外観モデルを有し、該外観モデルが少なくとも1つのモデル・パラメータを有する画像処理システムが提供される。システムは、関連した統計関係を含む多次元モデル・オブジェクトであって、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成されたモデル・オブジェクト、モデル・オブジェクトを選択して画像へ適用し、ターゲット・オブジェクトの形状及びテクスチャに近似する多次元出力オブジェクトの対応するシーケンスを生成し、出力オブジェクト及びターゲット・オブジェクトの各々の間の誤差を計算するサーチ・モジュール、シーケンスの隣接した出力オブジェクトの間で期待される所定の変形に基づいて、出力オブジェクトのシーケンス内で少なくとも1つの無効の出力オブジェクトを認識する補間モジュールであって、無効の出力オブジェクトが原初のモデル・パラメータを有する補間モジュール、及び出力オブジェクトのシーケンスを表すデータを出力へ提供する出力モジュールを備える。
本発明の更なる様相によれば、統計外観モデルでデジタル画像を解釈する方法であって、前記外観モデルが少なくとも1つのモデル・パラメータを有する、該方法が提供される。方法は、関連した第1の統計関係を含み、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第1のモデル・オブジェクトを提供し、関連した第2の統計関係を含み、変形してデジタル画像の中のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第2のモデル・オブジェクトを提供し、第2のモデル・オブジェクトが第1のモデル・オブジェクトとは異なる形状及びテクスチャ構成を有し、第1のモデル・オブジェクトを画像へ適用して、ターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第1の出力オブジェクトを生成し、第1の出力オブジェクトとターゲット・オブジェクトとの間の第1の誤差を計算し、第2のモデル・オブジェクトを画像へ適用して、ターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第2の出力オブジェクトを生成し、第2の出力オブジェクトとターゲット・オブジェクトとの間の第2の誤差を計算し、第1の誤差と第2の誤差とを比較して、最小有意誤差を有する出力オブジェクトの1つが選択されるようにし、選択された出力オブジェクトを表すデータを出力へ提供する。
本発明の更なる様相によれば、統計外観モデルを使用してデジタル画像を解釈し、前記外観モデルが少なくとも1つのモデル・パラメータを有するコンピュータ・プログラム製品が提供される。コンピュータ・プログラム製品はコンピュータ読み取り可能媒体を含み、オブジェクト・モジュールがコンピュータ読み取り可能媒体に記憶される。オブジェクト・モジュールは、関連した第1の統計関係を含み、変形してデジタル画像の中の多次元のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第1のモデル・オブジェクト、及び関連した第2の統計関係を含み、変形してデジタル画像の中のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第2のモデル・オブジェクトを有するように構成される。第1のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第1の出力オブジェクトを生成し、第1の出力オブジェクトとターゲット・オブジェクトとの間の第1の誤差を計算し、第2のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第2の出力オブジェクトを生成し、第2の出力オブジェクトとターゲット・オブジェクトとの間の第2の誤差を計算するサーチ・モジュールがコンピュータ読み取り可能媒体に記憶される。第2のモデル・オブジェクトは第1のモデル・オブジェクトとは異なる形状及びテクスチャ構成を有する。第1の誤差と第2の誤差とを比較して、最小有意誤差を有する出力オブジェクトの1つが選択されるようにする選択モジュールがサーチ・モジュールへ結合される。選択された出力オブジェクトを表すデータを出力へ提供する出力モジュールが選択モジュールへ結合される。
本発明の更なる様相によれば、統計外観モデルでデジタル画像を解釈する方法であって、該外観モデルが少なくとも1つのモデル・パラメータを有する、該方法が提供される。方法は、関連した統計関係を含む多次元モデル・オブジェクトを提供し、モデル・オブジェクトが、変形してデジタル画像の中の多次元のターゲット・オブジェクトの形状及びテクスチャに近似するように構成され、モデル・オブジェクトを画像へ適用して、ターゲット・オブジェクトの形状及びテクスチャに近似する多次元出力オブジェクトの対応するシーケンスを生成し、出力オブジェクト及びターゲット・オブジェクトの各々の間の誤差を計算し、シーケンスの隣接する出力オブジェクトの間で期待される所定の変形に基づいて、出力オブジェクトのシーケンス内で少なくとも1つの無効の出力オブジェクトを認識し、該無効の出力オブジェクトが原初のモデル・パラメータを有し、出力オブジェクトのシーケンスを表すデータを出力へ提供する。
本発明の好ましい実施形態のこれら及び他の特徴は、添付の図面を参照する下記の詳細な説明で明らかになるであろう。
画像処理システム
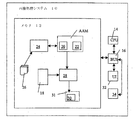
図1を参照すると、画像処理コンピュータ・システム10は、バス16を介してプロセッサ14へ結合されたメモリ12を有する。メモリ12は能動外観モデル(AAM、active appearance model)を有する。AAMは、1つのデジタル画像18又はデジタル画像の集合の中に含まれる関心事のターゲット・オブジェクト200(図2を参照)の形状及びグレーレベル外観の統計モデル・オブジェクトを含む。AAMの統計モデル・オブジェクトは2つの主な構成要素、即ち、オブジェクト外観(形状とテクスチャの双方)のパラメータ化された3Dモデル20、及びパラメータ変位と誘導画像残余との関係22の統計推定値を含む。これらの構成要素は、下記で更に詳細に説明するように、ターゲット・オブジェクト200の形状及び外観の完全な合成を可能にする。ターゲット・オブジェクト200のテクスチャとは、ターゲット・オブジェクト200を含む画像18の画像強度又は個々のピクセルのピクセル値を意味することが認識される。
図1を参照すると、画像処理コンピュータ・システム10は、バス16を介してプロセッサ14へ結合されたメモリ12を有する。メモリ12は能動外観モデル(AAM、active appearance model)を有する。AAMは、1つのデジタル画像18又はデジタル画像の集合の中に含まれる関心事のターゲット・オブジェクト200(図2を参照)の形状及びグレーレベル外観の統計モデル・オブジェクトを含む。AAMの統計モデル・オブジェクトは2つの主な構成要素、即ち、オブジェクト外観(形状とテクスチャの双方)のパラメータ化された3Dモデル20、及びパラメータ変位と誘導画像残余との関係22の統計推定値を含む。これらの構成要素は、下記で更に詳細に説明するように、ターゲット・オブジェクト200の形状及び外観の完全な合成を可能にする。ターゲット・オブジェクト200のテクスチャとは、ターゲット・オブジェクト200を含む画像18の画像強度又は個々のピクセルのピクセル値を意味することが認識される。
システム10はトレーニング・モジュール24を使用して、モデル・パラメータ変位と残余誤差との(例えば)局所線形関係22を決定することができる。これはトレーニング段階で学習され、トレーニング画像26の集合から何が有効な形状及び強度の変形であるかをガイドすることができる。関係22はモデルAAMの一部分として組み込まれる。サーチ・モジュール28は、サーチ段階の間に、AAMの決定された関係22を利用して、画像18からのモデル化ターゲット・オブジェクト200の識別及び再生を助ける。画像18の中にターゲット・オブジェクト200をマッチさせるため、下記で詳説するように、モジュール28は残余誤差を測定し、AAMを使用して現在のモデル・パラメータへの変化を予測し、出力モジュール31によって、意図されたターゲット・オブジェクト200の再生を表す出力30を生成する。したがって、画像解釈にAAMを使用することは、AAMの合成モデル画像と画像18でサーチされたターゲット・オブジェクト200との差(誤差)を最小にするモデル・パラメータを選択する最適化問題として考えることができる。処理システム10は、更に、サーチ・モジュール28、AAM、及び画像18の実行可能バージョンだけを含むことができ、トレーニング・モジュール24及びトレーニング画像26は、システム10によって使用されるAAMの構成要素20及び22を構成するように前もって実現されていることが認識される。
図1を再び参照すると、システム10は、更に、ユーザ・インタフェース32を有する。ユーザ・インタフェース32は、バス16を介してプロセッサ14へ結合され、ユーザ(図示されず)とインタラクトする。ユーザ・インタフェース32は、1つ又は複数のユーザ入力デバイス、例えば、非限定的に、QWERTYキーボード、キーパッド、トラックホイール、スタイラス、マウス、マイクロホン、及びユーザ出力デバイス、例えば、LCDスクリーン・ディスプレイ及び/又はスピーカを含むことができる。もしスクリーンが接触感知型であれば、ディスプレイは、更に、プロセッサ14によって制御されるユーザ入力デバイスとして使用されてよい。ユーザ・インタフェース32は、変形可能なモデルAAMを使用してデジタル画像18を解釈し、ユーザ・インタフェース32の上でターゲット・オブジェクト200を出力30として再生するため、システム10のユーザによって使用される。出力30は、スクリーン上に表示され、及び/又はメモリ12の中のファイルとして保存されるターゲット・オブジェクト200の結果の出力オブジェクト画像、ターゲット・オブジェクト200の結果の出力オブジェクト画像に関連づけられた情報を提供する記述データの集合、又はこれらの組み合わせとして表現可能である。更に、システム10はコンピュータ読み取り可能記憶媒体34を含んでよいことが認識される。コンピュータ読み取り可能記憶媒体34は、バス16を介してプロセッサ14へ結合され、プロセッサ14及び/又はモジュール24及び28、モデルAAM、及びメモリ12の中の画像18及び26のシステム10の構成要素をロード/更新する命令を提供する。コンピュータ読み取り可能媒体34は、ハードウェア及び/又はソフトウェア、例えば、単なる例として、磁気ディスク、磁気テープ、光学読み取り可能媒体、例えば、CD/DVD ROMS、及びメモリ・カードを含むことができる。各々の場合、コンピュータ読み取り可能媒体34は、小型ディスク、フロッピー(登録商標)・ディスケット、カセット、ハードディスク・ドライブ、半導体メモリ・カード、又はメモリ12の中に提供されたRAMの形式を取ってよい。上記の例のコンピュータ読み取り可能媒体34は、単独又は組み合わせて使用可能であることに注意すべきである。更に、プロセッサ14への命令及び/又はメモリ12の中のシステム10の構成要素をロード/更新する命令は、ネットワーク(図示されず)を介して提供可能であることが認識される。
例示的能動外観モデルのアルゴリズム
このセクションでは、図1及び図2を参照して、当技術分野で知られているように、どのようにして例示的外観モデルAAMを生成及び実行できるかを説明する。アプローチは、正規化及び加重ステップ、及び点のサブサンプリングを含むことができる。
このセクションでは、図1及び図2を参照して、当技術分野で知られているように、どのようにして例示的外観モデルAAMを生成及び実行できるかを説明する。アプローチは、正規化及び加重ステップ、及び点のサブサンプリングを含むことができる。
トレーニング段階
統計外観モデルAAMは、トレーニング・オブジェクト201、即ち、関心事のターゲット・オブジェクト200の1つの例の形状及びグレーレベル外観のモデル20を含む。トレーニング・オブジェクト201は、モデル・パラメータのコンパクトな集合によって、ほとんど任意の有効な例を「説明」することができる。典型的には、モデルAAMは、50個以上のパラメータ、例えば、非限定的に、形状及びテクスチャ・パラメータC、回転パラメータ、及びスケール・パラメータを有する。これらのパラメータは、より高レベルで画像18を解釈するために有用である。例えば、顔の画像を解析するとき、ターゲットとなる顔のアイデンティティ、ポーズ、又は表情を特性化するためにパラメータを使用してよい。モデルAAMは、ラベルを付けられたトレーニング画像26の集合に基づいて構築される。ここで、各々の例示的トレーニング・オブジェクト201の上に、重要な標識点202がマークされている。マークされた例は共通座標系へ整列させられ、各々の例はベクトルxによって表現可能である。したがって、モデルAAMは、形状正規化フレームの中で、形状変動モデルを外観変動モデルと組み合わせることによって生成される。例えば、解剖モデルAAMを構築するため、トレーニング画像26は重要位置に標識点202でマークを付けられ、脳の主な特徴、例えば、非限定的に、脳室、尾状核、及びレンズ核が概略的に示される(図2を参照)。
統計外観モデルAAMは、トレーニング・オブジェクト201、即ち、関心事のターゲット・オブジェクト200の1つの例の形状及びグレーレベル外観のモデル20を含む。トレーニング・オブジェクト201は、モデル・パラメータのコンパクトな集合によって、ほとんど任意の有効な例を「説明」することができる。典型的には、モデルAAMは、50個以上のパラメータ、例えば、非限定的に、形状及びテクスチャ・パラメータC、回転パラメータ、及びスケール・パラメータを有する。これらのパラメータは、より高レベルで画像18を解釈するために有用である。例えば、顔の画像を解析するとき、ターゲットとなる顔のアイデンティティ、ポーズ、又は表情を特性化するためにパラメータを使用してよい。モデルAAMは、ラベルを付けられたトレーニング画像26の集合に基づいて構築される。ここで、各々の例示的トレーニング・オブジェクト201の上に、重要な標識点202がマークされている。マークされた例は共通座標系へ整列させられ、各々の例はベクトルxによって表現可能である。したがって、モデルAAMは、形状正規化フレームの中で、形状変動モデルを外観変動モデルと組み合わせることによって生成される。例えば、解剖モデルAAMを構築するため、トレーニング画像26は重要位置に標識点202でマークを付けられ、脳の主な特徴、例えば、非限定的に、脳室、尾状核、及びレンズ核が概略的に示される(図2を参照)。
トレーニング・モジュール24による形状変動の統計モデル20の生成は、当技術分野で知られているように、主要構成要素解析(PCA)を点202へ適用することによって行われる。次に、次式を使用して、後続のターゲット・オブジェクト200に近似することができる。
数式1

グレーレベル外観の統計モデル20を構築するため、各々の例示的画像はゆがめられ、画像の制御点202が平均形状とマッチするようにされる(例えば、当技術分野で知られているように、三角法アルゴリズムを使用して)。次に、平均形状によってカバーされる領域で、グレーレベル情報gimが形状正規化画像からサンプルされる。グローバル照明変動の効果を最小にするため、スケーリングα及びオフセットβを適用して、例示的サンプルを正規化することができる。
数式2
したがって、gimを正規化するために必要なα及びβの値は、次式によって与えられる。
数式3
ここで、nはベクトルの中の要素の数である。
もちろん、正規化データの平均を取得することは、再帰プロセスである。なぜなら、正規化は平均によって定義されるからである。安定した解は、例の1つを平均の第1の推定値として使用し、(数式2及び3を使用して)他の例をそれに整列させ、平均を再推定し、反復することによって発見可能である。PCAを正規化データへ適用することによって、次の線形モデルを取得することができる。
数式4
したがって、任意の例の形状及び外観モデル20は、ベクトルbs及びbgによって要約される。形状とグレーレベル変動との間には相関が存在するかも知れないので、次のように、更なるPCAをデータへ適用することができる。各々の例について、次の連鎖ベクトルを生成することができる。
数式5
ここで、Wsは各々の形状パラメータの加重の対角行列であり、形状とグレー・モデル(下記を参照)との間の単位差を可能にする。これらのベクトルにPCAを適用すると、次の更なるモデルを得る。
数式6
ここで、Qは固有ベクトルであり、cはモデルの形状及びグレーレベルの双方を制御する外観パラメータのベクトルである。形状及びグレー・モデルのパラメータはゼロの平均を有するから、cも同様である。モデルの線形の性質によって、形状及びグレーレベルをcの関数として直接表現できることに注意されたい。
数式7
ここで、
数式8
数式8
Qs及びQgは、トレーニング・オブジェクト201を含むトレーニング画像の集合26から引き出された変動のモードを記述する行列であることが認識される。行列は、真のトレーニング集合26の位置及び誘導された画像残余からのランダム変位への線形回帰によって取得される。
図1を再び参照すると、トレーニング段階の間に、モデルAAMのインスタンスは、トレーニング画像の集合26の中の最適位置から、トレーニング・モジュール24によってランダムに変位され、AAMが形状及び強度の変動の有効範囲を学習するようにされる。変位されたモデルAAMのインスタンスと画像26との間の差は記録され、この残余とパラメータ変位との間(即ち、cとgとの間)の関係22を推定するため、線形回帰が使用される。注意すべきは、bsの要素が距離の単位を有し、bgの要素が強度の単位を有し、それらを直接比較できないことである。Pgは直交列を有するので、bgを1単位変動させることはgを1単位移動させる。bs及びbgを通約するため、サンプルgの上でbsを変動させる効果を推定する。これを行うため、各々のトレーニングの例の上で、bsの各々の要素を最適値からシステマティックに変位させ、変位された形状を与えられた画像をサンプルする。形状パラメータbsにおける単位変化当たりのgのRMS変化は加重wsを与え、この加重は数式5のそのパラメータへ適用される。トレーニング段階によって、モデルAAMは各々の点202の分散を決定することができる。これは、モデル・オブジェクトの各々の関連部分で移動及び強度の大きさの変化を提供し、変形可能なモデル・オブジェクトを画像18の中のターゲット・オブジェクト200へマッチさせるときの助けとなる。
モデル20及び関係22を含む前記の例示的AAMアルゴリズムを使用すると、ベクトルgから形状自由のグレーレベル画像を生成し、xによって記述される制御点を使用してそれをゆがめることによって、所与のcのために例示的出力画像30を合成することができる。
サーチ段階
ここで図1及び図2を再び参照すると、サーチ・モジュール28による画像サーチの間に、画像18の中のターゲット・オブジェクト200のピクセルと、モデル20及び関係22によって表される合成モデルAAMのモデル・オブジェクトとの差を最小にするパラメータが決定される。ターゲット・オブジェクト200は、モデル20及び関係22によって表されたモデル・オブジェクトとは幾分異なる(変形された)或る形状及び外観を有する画像18の中に存在するものと仮定する。モデル・オブジェクトの初期推定値が画像18の中に置かれ、点202ごとに比較することによって、現在の残余が測定される。関係22が使用され、より良好な当て嵌め(fit)を導く現在のパラメータへの変化が予測される。AAMの原初の公式化は、組み合わせられた形状及びグレーレベルのパラメータを直接処理する。代替のアプローチは、画像の残余を使用して形状パラメータを動かし、現在の形状を与えられた画像18からグレーレベル・パラメータを直接計算することである。このアプローチは、少数の形状モード及び多数のグレーレベル・モードが存在するときに有用でありうる。
ここで図1及び図2を再び参照すると、サーチ・モジュール28による画像サーチの間に、画像18の中のターゲット・オブジェクト200のピクセルと、モデル20及び関係22によって表される合成モデルAAMのモデル・オブジェクトとの差を最小にするパラメータが決定される。ターゲット・オブジェクト200は、モデル20及び関係22によって表されたモデル・オブジェクトとは幾分異なる(変形された)或る形状及び外観を有する画像18の中に存在するものと仮定する。モデル・オブジェクトの初期推定値が画像18の中に置かれ、点202ごとに比較することによって、現在の残余が測定される。関係22が使用され、より良好な当て嵌め(fit)を導く現在のパラメータへの変化が予測される。AAMの原初の公式化は、組み合わせられた形状及びグレーレベルのパラメータを直接処理する。代替のアプローチは、画像の残余を使用して形状パラメータを動かし、現在の形状を与えられた画像18からグレーレベル・パラメータを直接計算することである。このアプローチは、少数の形状モード及び多数のグレーレベル・モードが存在するときに有用でありうる。
したがって、サーチ・モジュール28は、考慮されている画像18と外観モデルAAMによって合成された画像との差が最小にされる最適化問題として、画像18の解釈を取り扱う。したがって、モデル・パラメータの集合cが与えられると、モジュール28はモデルAAMのインスタンスの形状x及びテクスチャgmの仮説を生成する。この仮説を画像と比較するため、モジュール28はモデルAAMの示唆された形状を使用して画像のテクスチャgsをサンプルし、差を計算する。差の最小化はモデルAAMの収束を導き、サーチ・モジュール28による出力30の生成を生じる。
前述したモデルAAMは、当技術分野で知られているように、例えば、非限定的に、形状AAM、能動ブロブ(Active Blobs)、モーフィング可能モデル(Morphable Models)、及び直接外観モデル(Direct Appearance Models)を含んでよいことが認識される。能動外観モデル(AAM)の用語は、線形及び形状外観モデルの前述したクラスを一般的に意味するように使用され、より大きな確実性としては、前述した例示的モデルAAMの特定のアルゴリズムだけに限定されない。更に、モデルAAMは、誤差画像と形状及び外観パラメータへの追加増分との前記線形関係22以外の関係を使用できることが認識される。
ターゲット・オブジェクトの多様性
図1を参照すると、現在の多次元AAMモデルは、画像18の中のターゲット・オブジェクト200(図2を参照)の存在を検証しない。ターゲット・オブジェクト200は、特定された多次元モデル・オブジェクトによって適切に表現可能である。言い換えれば、現在の多次元モデルAAMの公式化は、画像18の中で、特定された多次元モデル・オブジェクトの最良マッチを発見するが、モデル化されたターゲット・オブジェクト200が画像18の中に実際に存在するかどうかをチェックしない。AAMの最良ターゲット・モデルを識別して特定の画像18で使用することは、医療撮像マーケットで大きな意味を有する。医療撮像の応用では、目的は病理解剖を区分することである。病理解剖は、生理解剖よりも著しい多様性を有する。病理解剖の全ての変形を1つのモデル・オブジェクトへモデル化する場合の重要な副作用は、モデルAAMが間違った形状を「学習」することができ、その結果、次善の解決法を発見できることである。学習段階におけるこの不適切な学習は、モデル生成の間に、例示的トレーニング画像26に基づく一般化ステップが存在する事実によって生じる。
図1を参照すると、現在の多次元AAMモデルは、画像18の中のターゲット・オブジェクト200(図2を参照)の存在を検証しない。ターゲット・オブジェクト200は、特定された多次元モデル・オブジェクトによって適切に表現可能である。言い換えれば、現在の多次元モデルAAMの公式化は、画像18の中で、特定された多次元モデル・オブジェクトの最良マッチを発見するが、モデル化されたターゲット・オブジェクト200が画像18の中に実際に存在するかどうかをチェックしない。AAMの最良ターゲット・モデルを識別して特定の画像18で使用することは、医療撮像マーケットで大きな意味を有する。医療撮像の応用では、目的は病理解剖を区分することである。病理解剖は、生理解剖よりも著しい多様性を有する。病理解剖の全ての変形を1つのモデル・オブジェクトへモデル化する場合の重要な副作用は、モデルAAMが間違った形状を「学習」することができ、その結果、次善の解決法を発見できることである。学習段階におけるこの不適切な学習は、モデル生成の間に、例示的トレーニング画像26に基づく一般化ステップが存在する事実によって生じる。
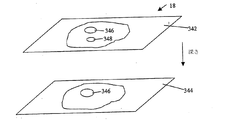
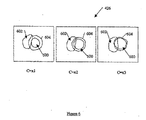
図3aを参照すると、例示的組織Oは、幅及び高さを1cmへ設定された正方形の生理形状を有する。一度患者が病理Aに罹ると、組織Oの高さは1よりも小さく変形し、患者が病理Bに罹ると、組織Oの幅は1よりも小さく変形する。この例において、注意すべきは、組織Oの高さ及び幅の双方が同時に1よりも小さくなる有効な病理が存在しないことである。この例において、図4の例示的トレーニング画像426は、組織Oの高さ及び幅の双方が同時に1よりも小さくなる組織Oのトレーニング・モデルを含まないことが認識される。図3bを参照すると、図4の画像18が、患者の脳340の3次元容積を表す2Dスライスの集合として表される例が示される。画像18の個々のスライスの深さに依存して、1つのスライス342は左脳室346及び右脳室348の双方を含み、スライス344は1つの左脳室346だけを含むことが分かる。上記の観点から、画像18がターゲット・オブジェクトの大きな変形を含み、AAMの1つの特定されたモデル・オブジェクトが所望の出力30を生じない場合が存在する。例えば、非限定的に、2脳室モデル・オブジェクトが、ただ1つの脳室を有する画像418へ適用されるか、病理Aのモデル・オブジェクトが、病理Bの組織Oのみを含む画像418へ適用される。ターゲット・オブジェクトの大きな変形の他の例が、空間及び/又は時間の次元で存在することが認識される。
複数モデル
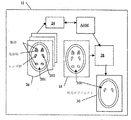
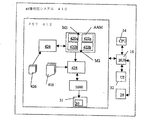
図4を参照すると、同様の要素は、図1で与えられた要素と類似の参照番号及び記述を有する。画像処理コンピュータ・システム410は、バス16を介してプロセッサ14へ結合されたメモリ12を有する。メモリ12は、複数の統計モデル・オブジェクトを含む能動外観モデル(AAM)を有し、統計モデル・オブジェクトの少なくとも1つは、デジタル画像418、又はデジタル画像418の集合に含まれる関心事のターゲット・オブジェクト200(図2を参照)の形状及びグレーレベル外観をモデル化するため適切である可能性がある。心臓の応用についての様々なモデル・オブジェクトの例は、例えば、非限定的に、脳室モデル、尾状核モデル、及びレンズ核モデルであり、複合心臓画像418からそれぞれの解剖を識別及び区分するために使用可能である。AAMの統計2Dモデル・オブジェクトは、オブジェクト外観(形状及びテクスチャ)のパラメータ化2Dモデル420a及び420b、及びパラメータ変位と誘導画像残余との関係422a及び422bの統計推定値から成る主な構成要素を含む。これによって、下記で更に説明するように、ターゲット・オブジェクト200の形状及び外観の完全な合成が可能になる。構成要素420a、b及び422a、bは、前述した構成要素20及び22と内容において類似するが、構成要素420a、bのモデル・オブジェクトは、システム10(図1を参照)の構成要素20の3Dモデル・オブジェクトではなく、空間的に2Dであることが異なる。更に、システム410のモデルAAMの構成要素420a及び422aは、1つのモデル・オブジェクト及び関連した統計情報、例えば、図3aの組織Oの病理Aについてのモデル・オブジェクトを表し、構成要素420b及び422bは組織Oの病理Bについてのモデル・オブジェクトを表す。他の例は、構成要素420a及び422aが図3bのスライス342の2脳室ジオメトリを表し、構成要素420b及び422bがスライス344の1脳室ジオメトリを表す場合である。システム410のモデルAAMは、ターゲット・オブジェクト200(図2を参照)の構成、例えば、非限定的に、画像418の容積の中の位置及び/又は様々な病理に関連づけられた解剖ジオメトリにおける所定の多様性を表す2Dモデル・オブジェクトの2つ以上の集合(構成要素420a、b及び422a、b)を有することが認識される。
図4を参照すると、同様の要素は、図1で与えられた要素と類似の参照番号及び記述を有する。画像処理コンピュータ・システム410は、バス16を介してプロセッサ14へ結合されたメモリ12を有する。メモリ12は、複数の統計モデル・オブジェクトを含む能動外観モデル(AAM)を有し、統計モデル・オブジェクトの少なくとも1つは、デジタル画像418、又はデジタル画像418の集合に含まれる関心事のターゲット・オブジェクト200(図2を参照)の形状及びグレーレベル外観をモデル化するため適切である可能性がある。心臓の応用についての様々なモデル・オブジェクトの例は、例えば、非限定的に、脳室モデル、尾状核モデル、及びレンズ核モデルであり、複合心臓画像418からそれぞれの解剖を識別及び区分するために使用可能である。AAMの統計2Dモデル・オブジェクトは、オブジェクト外観(形状及びテクスチャ)のパラメータ化2Dモデル420a及び420b、及びパラメータ変位と誘導画像残余との関係422a及び422bの統計推定値から成る主な構成要素を含む。これによって、下記で更に説明するように、ターゲット・オブジェクト200の形状及び外観の完全な合成が可能になる。構成要素420a、b及び422a、bは、前述した構成要素20及び22と内容において類似するが、構成要素420a、bのモデル・オブジェクトは、システム10(図1を参照)の構成要素20の3Dモデル・オブジェクトではなく、空間的に2Dであることが異なる。更に、システム410のモデルAAMの構成要素420a及び422aは、1つのモデル・オブジェクト及び関連した統計情報、例えば、図3aの組織Oの病理Aについてのモデル・オブジェクトを表し、構成要素420b及び422bは組織Oの病理Bについてのモデル・オブジェクトを表す。他の例は、構成要素420a及び422aが図3bのスライス342の2脳室ジオメトリを表し、構成要素420b及び422bがスライス344の1脳室ジオメトリを表す場合である。システム410のモデルAAMは、ターゲット・オブジェクト200(図2を参照)の構成、例えば、非限定的に、画像418の容積の中の位置及び/又は様々な病理に関連づけられた解剖ジオメトリにおける所定の多様性を表す2Dモデル・オブジェクトの2つ以上の集合(構成要素420a、b及び422a、b)を有することが認識される。
システム410はトレーニング・モジュール424を使用して、モデル・パラメータ変位と残余誤差との複数の(例えば)局所線形関係422a、bを決定することができる。これはトレーニング段階で学習され、ターゲット・オブジェクト200の様々な個別の構成/ジオメトリをトレーニング・オブジェクト201(図2を参照)として含むトレーニング画像26の適切な集合から、どれが有効な形状及び強度の変形であるかをガイドする。関係422a及び422bは、モデルAAMの一部分として組み込まれる。したがって、トレーニング・モジュール424は、複数の2Dモデル・オブジェクトを画像418へ適用する能力を有するモデルAAMを生成するために使用される。サーチ・モジュール428は、サーチ段階の間に、AAMの決定された関係422a及び422bを利用して、モデル化されたターゲット・オブジェクト200を画像418から識別及び再生するのを助ける。サーチ・モジュール428は、2Dモデル・オブジェクトの各々(構成要素420a、b及び422a、b)を画像418へ適用し、ターゲット・オブジェクト200を識別及び合成しようと努力する。ターゲット・オブジェクト200を画像418へマッチさせるため、モジュール428は残余誤差を測定し、AAMを使用して現在のモデル・パラメータへの変更を予測し、意図されたターゲット・オブジェクト200の再生を表す出力30を生成する。処理システム410は、更に、サーチ・モジュール428、AAM、及び画像418の実行可能バージョンのみを含むことができ、トレーニング・モジュール424及びトレーニング画像426は、システム410によって使用されるAAMの構成要素420a、b、422a、bを構成するように前もって実現されていることが認識される。システム410は、更に、選択モジュール402を使用して、サーチ・モジュール428によって適用された2Dモデル・オブジェクトのどれが意図されたターゲット・オブジェクト200(図2を参照)を最良に表すかを選択する。
図4を再び参照すると、一般的な場合、画像の集合418、及び画像418の中に存在するターゲット・オブジェクト200(図2を参照)をモデル化する2Dモデル・オブジェクトM1...Mnの集合が存在する。システム410のAAMアルゴリズムは、どの2DモデルMiが画像418の中のターゲット・オブジェクト200を最良に表すかを選択することができる。発明者らは、この問題へ2つの例示的解決法を呈示する。1つの解決法は一般的であり、第2の解決法は問題領域に関する更に多くの情報を必要とする。注意すべきは、これらの解決法が必ずしも相互に排他的ではないことである。
一般的解決法
一般的解決法は、画像418の中で各々のモデルMiを使用してサーチ・モジュール428を介してターゲット・オブジェクト200をサーチし、例えば、選択された2DモデルMiから生成された出力30の画像と画像418の中のターゲット・オブジェクト200との差として計算された最も適切/最小の誤差を有する出力30を選択することである。注意すべきこととして、例示的能動外観モデルのアルゴリズムに関して説明したように、追加の制約(例えば、画像418の中のモデル・オブジェクトの空間的中心が特定の領域の中にある)の集合のもとで、画像418をサーチできることであり、これらの制約は、もし所望であれば、全てのモデルMiについて同じであることができる。したがって、ターゲット・オブジェクト200をサーチするため、2つ以上の選択された2DモデルMiが、サーチ・モジュール428によって画像418へ適用される。選択モジュール402は、各々のモデルMiとターゲット・オブジェクト200との間の当て嵌まりを表す誤差を解析し、最低誤差を有する当て嵌まり(出力30)を選択し、続いてインタフェース32の上で表示する。
一般的解決法は、画像418の中で各々のモデルMiを使用してサーチ・モジュール428を介してターゲット・オブジェクト200をサーチし、例えば、選択された2DモデルMiから生成された出力30の画像と画像418の中のターゲット・オブジェクト200との差として計算された最も適切/最小の誤差を有する出力30を選択することである。注意すべきこととして、例示的能動外観モデルのアルゴリズムに関して説明したように、追加の制約(例えば、画像418の中のモデル・オブジェクトの空間的中心が特定の領域の中にある)の集合のもとで、画像418をサーチできることであり、これらの制約は、もし所望であれば、全てのモデルMiについて同じであることができる。したがって、ターゲット・オブジェクト200をサーチするため、2つ以上の選択された2DモデルMiが、サーチ・モジュール428によって画像418へ適用される。選択モジュール402は、各々のモデルMiとターゲット・オブジェクト200との間の当て嵌まりを表す誤差を解析し、最低誤差を有する当て嵌まり(出力30)を選択し、続いてインタフェース32の上で表示する。
更に、注意されることは、モデルMiによって生成され、モジュール31によって出力された画像出力30と実際の画像418との差を測定するため、幾つかの誤差尺度が提案されたことである。例えば、StegmannはL2ノルム、マハラノビス及びローレンツのメトリクスを誤差尺度として提案した。これらの尺度は、発明者らのテストに従って十分な結果を提供する平均誤差を含んで、本発明に有効である。
数式9
ここで、「モデルサンプル」は、モデルMiで定義されたサンプルの数である。「平均誤差」は、使用されたモデルMiから比較的独立している値を有するように見える(マハラノビス距離では、画像との各々のサンプルの差は、サンプルの分散で加重される)。モデルMiの各々が、異なった数の点202(図2を参照)を有するように構成される場合、AAMの複数のモデルMiから選択されたモデルMiの各々を、画像418へ適用することによって生成された「平均誤差」は、ターゲット・オブジェクト200の最良当て嵌まりを有するモデルMiの選択を助けるために正規化可能であることが認識される。
具体的な解決法の例
第2のアプローチは、モデルMi、又はモデルMiの集合の選択に基づいて、画像418の中の他の所定のオブジェクトの存在及び/又は患者の他の画像418に対する画像418の中の他の組織の相対的位置に基づいて、モデルMiを使用することである。例えば、心臓の解析において、典型的には、もし異なった検査又は患者の履歴から、(梗塞の結果として)患者の心筋層の内側の画像で、死んだ組織が発見されたならば、サーチ・モジュール428のアルゴリズムは、心臓の正規の生理モデルMiではなく「心筋梗塞モデル」を選択して、画像418で心臓を識別するであろう。より単純な状況に同じアイデアを適用することができる。例えば、患者の年齢又は性別に基づいてモデルMiを選択することができる。認識されることとして、例ではトレーニング段階の間にトレーニング画像426の中でターゲット・オブジェクト200へ様々なラベルを関連づけ、所定の病理及び/又は解剖ジオメトリを表すことができる。これらのラベルは、更に、様々な所定の病理/ジオメトリを表すそれぞれのモデルMiへ関連づけられてよい。
第2のアプローチは、モデルMi、又はモデルMiの集合の選択に基づいて、画像418の中の他の所定のオブジェクトの存在及び/又は患者の他の画像418に対する画像418の中の他の組織の相対的位置に基づいて、モデルMiを使用することである。例えば、心臓の解析において、典型的には、もし異なった検査又は患者の履歴から、(梗塞の結果として)患者の心筋層の内側の画像で、死んだ組織が発見されたならば、サーチ・モジュール428のアルゴリズムは、心臓の正規の生理モデルMiではなく「心筋梗塞モデル」を選択して、画像418で心臓を識別するであろう。より単純な状況に同じアイデアを適用することができる。例えば、患者の年齢又は性別に基づいてモデルMiを選択することができる。認識されることとして、例ではトレーニング段階の間にトレーニング画像426の中でターゲット・オブジェクト200へ様々なラベルを関連づけ、所定の病理及び/又は解剖ジオメトリを表すことができる。これらのラベルは、更に、様々な所定の病理/ジオメトリを表すそれぞれのモデルMiへ関連づけられてよい。
尚、特定の画像418の上で組織(ターゲット・オブジェクト200)を区分するため最良モデルMiを選択する潜在的利点は、区分の改善に限定されない。モデルMiの選択は、実際に、患者の中に存在する病理に関して価値ある情報を提供することができる。例えば、図3aにおいて、モデルBではないモデルAの選択は、下記で詳説するように、出力30の中で識別される組織Oを有する患者が病理Aと潜在的に診断されることを表すことを示す。
複数モデルAAMの動作
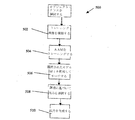
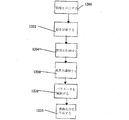
図4及び図5を参照すると、AAMアルゴリズムの複数2DモデルMiの動作500は、次のとおりである。502では、区分のために選択された解剖に基づいて、意図されたターゲット・オブジェクト・クラスがシステム410によって選択される。504では、ターゲット・オブジェクト・クラスの複数の形式を表す複数のトレーニング画像426、即ち、ターゲット・オブジェクト200(図2を参照)の様々な個別の構成/ジオメトリを含む画像426が作られる。506では、モデル420a、bの各々についてモデル・パラメータ変位と残余誤差との複数の関係422a、bを決定し、何がトレーニング画像426の集合からの有効な形状及び強度の変形であるかをガイドするため、トレーニング・モジュール424が使用される。次に、複数のモデルMiが、トレーニング・モジュール424によってAAMの中に含まれる。508では、サーチ・モジュール428が、サーチ段階の間に、AAMの選択されたモデルMiを利用して、モデル化されたターゲット・オブジェクト200を画像418から識別及び再生するのを助ける。ここで、ターゲット・オブジェクト200をサーチするため、2つ以上の選択された2DモデルMiが、サーチ・モジュール428によって画像418へ適用される。510で、選択モジュール402は、各々の選択された2DモデルMiと画像418のターゲット・オブジェクト200との間の当て嵌まりを表す誤差を解析して、最低誤差を有する当て嵌まり(出力30)を選択する。次に512で、出力30が出力モジュール31によってインタフェース32の上で表示される。ステップ502、504、及び506は、AAMの適用(サーチ段階)とは別個のセッション(トレーニング段階)で完了されてよいことが認識される。認識されることとして、ステップ508は、更に、追加の情報、例えば、モデルMiのラベルを使用して、画像418へ適用されるモデルMiの選択を助けることができる。
図4及び図5を参照すると、AAMアルゴリズムの複数2DモデルMiの動作500は、次のとおりである。502では、区分のために選択された解剖に基づいて、意図されたターゲット・オブジェクト・クラスがシステム410によって選択される。504では、ターゲット・オブジェクト・クラスの複数の形式を表す複数のトレーニング画像426、即ち、ターゲット・オブジェクト200(図2を参照)の様々な個別の構成/ジオメトリを含む画像426が作られる。506では、モデル420a、bの各々についてモデル・パラメータ変位と残余誤差との複数の関係422a、bを決定し、何がトレーニング画像426の集合からの有効な形状及び強度の変形であるかをガイドするため、トレーニング・モジュール424が使用される。次に、複数のモデルMiが、トレーニング・モジュール424によってAAMの中に含まれる。508では、サーチ・モジュール428が、サーチ段階の間に、AAMの選択されたモデルMiを利用して、モデル化されたターゲット・オブジェクト200を画像418から識別及び再生するのを助ける。ここで、ターゲット・オブジェクト200をサーチするため、2つ以上の選択された2DモデルMiが、サーチ・モジュール428によって画像418へ適用される。510で、選択モジュール402は、各々の選択された2DモデルMiと画像418のターゲット・オブジェクト200との間の当て嵌まりを表す誤差を解析して、最低誤差を有する当て嵌まり(出力30)を選択する。次に512で、出力30が出力モジュール31によってインタフェース32の上で表示される。ステップ502、504、及び506は、AAMの適用(サーチ段階)とは別個のセッション(トレーニング段階)で完了されてよいことが認識される。認識されることとして、ステップ508は、更に、追加の情報、例えば、モデルMiのラベルを使用して、画像418へ適用されるモデルMiの選択を助けることができる。
前述した複数モデル方法の他の変形は、画像418の集合(即ち、I1...In)を区分するため、モデルの集合M1...Mnの中から最良モデル・オブジェクトMiをどこで発見したいかである。画像418は、「下記のAAM補間」で説明されるように、同じ解剖画像418が同じ空間ロケーションについて時間を通して選択される(即ち、時間的画像シーケンス)。モデル・オブジェクトの集合M1...Mnを画像の集合I1...Inへ適用するために使用できる2つのアルゴリズム、例えば、非限定的に、下記で説明する「最小誤差規準」及び「最頻度使用モデル」が存在する。
最小誤差規準
各々のモデル・オブジェクトMiが、画像418の集合の各々の画像Iiへ適用される。モデル・オブジェクトMiの各々について、画像の集合I1...Inの区分における全ての誤差が合計され、最小有意誤差を有すると考えられる1つの適用モデル・オブジェクトMiが選択される。所与のモデル・オブジェクトMiについて、画像の集合Ii...Inの区分誤差は、画像418の集合における各々の画像Iiの誤差の和と考えられる(全体の平均誤差も使用できる。なぜなら、それらはスケール因子が異なるだけだからである)。一度1つのモデル・オブジェクトMiが選ばれると、選択されたモデル・オブジェクトMiに関連した出力オブジェクト30が使用され、画像418の集合の区分を助ける。
各々のモデル・オブジェクトMiが、画像418の集合の各々の画像Iiへ適用される。モデル・オブジェクトMiの各々について、画像の集合I1...Inの区分における全ての誤差が合計され、最小有意誤差を有すると考えられる1つの適用モデル・オブジェクトMiが選択される。所与のモデル・オブジェクトMiについて、画像の集合Ii...Inの区分誤差は、画像418の集合における各々の画像Iiの誤差の和と考えられる(全体の平均誤差も使用できる。なぜなら、それらはスケール因子が異なるだけだからである)。一度1つのモデル・オブジェクトMiが選ばれると、選択されたモデル・オブジェクトMiに関連した出力オブジェクト30が使用され、画像418の集合の区分を助ける。
最頻度使用モデル
各々のモデルMiについて、「使用頻度」の得点Siが保存される。画像の集合I1...Inの中の各々の画像Iiについて、全てのモデル・オブジェクトM1...Mnを使用して画像Iiが区分される。次に、それぞれの画像Iiの各々について、最低誤差を有するモデル・オブジェクトMiの各々の得点Siが増分される。次に、システム410は、最大得点Siを有するモデル・オブジェクトMiを返す。このモデル・オブジェクトは、画像の集合I1...Inの画像Iiについて最低誤差を最も頻繁に生じたモデル・オブジェクトMiを表す。したがって、言い換えれば、集合の画像Iiの大部分について選ばれたモデル・オブジェクトMiが、例えば、最小誤差規準に基づいて選択される。この場合、集合からの画像Iiをベースとして画像Iiの上で最も頻繁に選択されたモデル・オブジェクトMiが、モデル・オブジェクトMiとして選ばれ、画像の集合の中の全ての画像Iiのために出力オブジェクト30のシーケンスを提供する。
各々のモデルMiについて、「使用頻度」の得点Siが保存される。画像の集合I1...Inの中の各々の画像Iiについて、全てのモデル・オブジェクトM1...Mnを使用して画像Iiが区分される。次に、それぞれの画像Iiの各々について、最低誤差を有するモデル・オブジェクトMiの各々の得点Siが増分される。次に、システム410は、最大得点Siを有するモデル・オブジェクトMiを返す。このモデル・オブジェクトは、画像の集合I1...Inの画像Iiについて最低誤差を最も頻繁に生じたモデル・オブジェクトMiを表す。したがって、言い換えれば、集合の画像Iiの大部分について選ばれたモデル・オブジェクトMiが、例えば、最小誤差規準に基づいて選択される。この場合、集合からの画像Iiをベースとして画像Iiの上で最も頻繁に選択されたモデル・オブジェクトMiが、モデル・オブジェクトMiとして選ばれ、画像の集合の中の全ての画像Iiのために出力オブジェクト30のシーケンスを提供する。
混合モデル
更に認識されることは、空間画像シーケンス(空間にわたって分布する画像Ii)によって表された画像の集合I1...Inについて、異なったモデル・オブジェクトMiを使用し、全体の画像集合I1...Inの選択された部分集合について、対応する出力オブジェクト30を提供できることである。画像の所与の部分集合について選択されたモデル・オブジェクトMiの各々は、最小誤差規準に基づくことができる。それによって、それぞれのモデル・オブジェクトMiは、それぞれの画像I1について最小誤差を生じるように、それぞれの画像I1...Inとマッチする。言い換えれば、2つ以上のモデル・オブジェクトMiを使用して、画像の集合I1...Inからの1つ又は複数のそれぞれの画像を表すことができる。
更に認識されることは、空間画像シーケンス(空間にわたって分布する画像Ii)によって表された画像の集合I1...Inについて、異なったモデル・オブジェクトMiを使用し、全体の画像集合I1...Inの選択された部分集合について、対応する出力オブジェクト30を提供できることである。画像の所与の部分集合について選択されたモデル・オブジェクトMiの各々は、最小誤差規準に基づくことができる。それによって、それぞれのモデル・オブジェクトMiは、それぞれの画像I1について最小誤差を生じるように、それぞれの画像I1...Inとマッチする。言い換えれば、2つ以上のモデル・オブジェクトMiを使用して、画像の集合I1...Inからの1つ又は複数のそれぞれの画像を表すことができる。
モデルのラベリング
図7を参照すると、同様の要素は図4で与えられた要素と類似の参照番号及び記述を有する。システム410は、更に、出力オブジェクト30へ割り当てられるAAMのモデル・パラメータの値を決定する確認モジュール700を有する。トレーニング・モジュール424は、所定の特性ラベルをモデル・パラメータへ加えるために使用され、下記で更に説明するように、そのラベルは、関連したターゲット・オブジェクト200(図2を参照)の公知の条件を示す。モデル・パラメータは多数の値の領域へ分割され、公知の条件を示す異なった所定の特性が領域の各々へ割り当てられる。各々の所定の特性について、代表的なモデル・パラメータ値がトレーニング画像426の中で様々なターゲット・オブジェクト200へ割り当てられ、したがってトレーニング段階の間に(前述したように)AAMモデルによって学習される。モデル・パラメータの値はターゲット・オブジェクト200(図2を参照)の所定の特徴を示す。これは、下記で更に説明するように、関連した病理の診断を助けることができる。
図7を参照すると、同様の要素は図4で与えられた要素と類似の参照番号及び記述を有する。システム410は、更に、出力オブジェクト30へ割り当てられるAAMのモデル・パラメータの値を決定する確認モジュール700を有する。トレーニング・モジュール424は、所定の特性ラベルをモデル・パラメータへ加えるために使用され、下記で更に説明するように、そのラベルは、関連したターゲット・オブジェクト200(図2を参照)の公知の条件を示す。モデル・パラメータは多数の値の領域へ分割され、公知の条件を示す異なった所定の特性が領域の各々へ割り当てられる。各々の所定の特性について、代表的なモデル・パラメータ値がトレーニング画像426の中で様々なターゲット・オブジェクト200へ割り当てられ、したがってトレーニング段階の間に(前述したように)AAMモデルによって学習される。モデル・パラメータの値はターゲット・オブジェクト200(図2を参照)の所定の特徴を示す。これは、下記で更に説明するように、関連した病理の診断を助けることができる。
前のセクションで、複数のモデル420a、b及び422a、bをどのように使用して、ターゲット・オブジェクト200の識別の改善を助け、究極的には画像418(図4を参照)からのこの識別されたターゲット・オブジェクト200の区分の改善を助けるかを説明した。更に、モデルAAMを使用して、モデル・パラメータの離散的値領域に関連づけられた所定の特性の形式で、区分された組織に関する追加の情報(例えば、病理)を決定するのを助けることができる。
AAMモデルが、モデル・パラメータC、サイズ、及び角度に基づいて、サーチされたターゲット・オブジェクト200(例では心室600)の近現実的画像を生成できることを、図2及び図6を参照して注意しておく。位置は、画像418の中のターゲット・オブジェクトを位置決めし、心臓のAAMモデルの出力オブジェクト30が、異なったモデル・パラメータC=x1、x2、x3に関連づけられる。尚、値x1、x2、及びx3が収束されたC値であり、このC値が、サーチ・モジュール428によって、画像418の中のターゲット・オブジェクトを最良に表すものとして出力オブジェクト30へ割り当てられることである。図6の画像426は、左心室602、右心室600、及び右心室壁604の例示的ターゲット・オブジェクトを示す。注意すべきことは、モデル・パラメータCが、出力オブジェクト30の形状及びテクスチャを実際に決定することである。例えば、C=x1は、厚い壁の右心室600を表し、C=x2は正常な壁の右心室600を表し、C=x3は薄い壁の右心室600を表すことができる。もし所望であれば、他のモデル・パラメータが使用されてよいことが認識される。
ラベリング動作
図8を参照すると、AAMモデルは、800でパラメータCを「n」個の領域へ分割し、各々の領域で、AAMモデルは特定の所定の特性を呈示する。次に802で、領域は、例えば、心臓病専門医によって、その特性のラベルを付けられる。心臓病専門医は、トレーニング画像426の中の様々なトレーニング・オブジェクトの特定の輪郭に関連づけられた特性ラベルについてテキストをタイプする。一度サーチ・モジュール428によるサーチが完了すると、サーチの出力オブジェクト30に関連づけられたモデル・パラメータCが使用されて、804で、確認モジュール700によって、パラメータ値が属する領域が識別され、806で、出力オブジェクト30によってモデル化された心室604を有する患者のために所定の特性が割り当てられる。次に、808で、出力モジュール31によって、出力オブジェクト30を表すデータ及び所定の特性が出力へ提供される。モジュール428、31、及び700は、説明された機能以外の機能を有するように構成されてよいことが認識される。例えば、サーチ・モジュール428は出力オブジェクト30を生成し、関連したモデル・パラメータの値に基づいて、所定の特性を割り当てることができる。
図8を参照すると、AAMモデルは、800でパラメータCを「n」個の領域へ分割し、各々の領域で、AAMモデルは特定の所定の特性を呈示する。次に802で、領域は、例えば、心臓病専門医によって、その特性のラベルを付けられる。心臓病専門医は、トレーニング画像426の中の様々なトレーニング・オブジェクトの特定の輪郭に関連づけられた特性ラベルについてテキストをタイプする。一度サーチ・モジュール428によるサーチが完了すると、サーチの出力オブジェクト30に関連づけられたモデル・パラメータCが使用されて、804で、確認モジュール700によって、パラメータ値が属する領域が識別され、806で、出力オブジェクト30によってモデル化された心室604を有する患者のために所定の特性が割り当てられる。次に、808で、出力モジュール31によって、出力オブジェクト30を表すデータ及び所定の特性が出力へ提供される。モジュール428、31、及び700は、説明された機能以外の機能を有するように構成されてよいことが認識される。例えば、サーチ・モジュール428は出力オブジェクト30を生成し、関連したモデル・パラメータの値に基づいて、所定の特性を割り当てることができる。
例示的なパラメータの割り当て
1つの例を考える。図3aのサンプル組織Oを考える。全ての有効なトレーニング画像426(図4を参照)を有するAAMモデルが構築され、パラメータ・ベクトルCを定義するため2つの構成要素が保持される(即ち、2つの固有ベクトルが保持される)。したがって、C空間は、実際にはR2である。そのような空間において、各々の点はCの値を表し、したがって、AAMモデルの中の形状及びテクスチャを表す。平面R2におけるモデルのロケーションは、図9のようにグラフで表すことができる。組織Oの(原点における)平均形状は、正方形である。水平軸は組織Oの幅の変化を表し、垂直軸は高さの変化を表す。認識できるように、この平面R2において、病理A(1より小さな高さ)を表す全ての形状は相互に近接し、病理B(1より小さな幅)を表す全ての形状は相互に近接している。したがって、2つの領域A、Bを生成して、病理Aを有する全ての形状が領域Aの内側にあり、病理Bを有する全ての形状が領域Bの内側にあるようにすることができる。更に、画像の中で識別されてはならない形状の残りを含む領域Nを定義することができる。なぜなら、それらの形状はトレーニング集合426の中に存在しないからである。
1つの例を考える。図3aのサンプル組織Oを考える。全ての有効なトレーニング画像426(図4を参照)を有するAAMモデルが構築され、パラメータ・ベクトルCを定義するため2つの構成要素が保持される(即ち、2つの固有ベクトルが保持される)。したがって、C空間は、実際にはR2である。そのような空間において、各々の点はCの値を表し、したがって、AAMモデルの中の形状及びテクスチャを表す。平面R2におけるモデルのロケーションは、図9のようにグラフで表すことができる。組織Oの(原点における)平均形状は、正方形である。水平軸は組織Oの幅の変化を表し、垂直軸は高さの変化を表す。認識できるように、この平面R2において、病理A(1より小さな高さ)を表す全ての形状は相互に近接し、病理B(1より小さな幅)を表す全ての形状は相互に近接している。したがって、2つの領域A、Bを生成して、病理Aを有する全ての形状が領域Aの内側にあり、病理Bを有する全ての形状が領域Bの内側にあるようにすることができる。更に、画像の中で識別されてはならない形状の残りを含む領域Nを定義することができる。なぜなら、それらの形状はトレーニング集合426の中に存在しないからである。
一度AAMモデルのサーチが特定の画像418の上で完了すると、モデルのロケーションの中で発見されたパラメータCを使用して、平面R2の分割に基づき患者の病理のタイプを決定することができる。尚、もし領域Nに位置するパラメータCをサーチが識別するならば、これはサーチが成功しなかったことの表示として使用可能である。注意すべきこととして、モデル・パラメータをラベリングするこのアプローチは、例えば、非限定的に、回転及びスケールのパラメータを使用して拡張可能である。そのような場合、ベクトルCではなくベクトル(C、スケール、回転)を考え、それに従ってこの空間を分割及びラベリングすることになる。
AAM補間
図10を参照すると、同様の要素は図4で与えられた要素と類似の参照番号及び記述を有する。システム410は、更に、補間モジュール1000を有する。補間モジュール1000は、誤りのある出力オブジェクト30について位置及び/又は時間にわたって置換出力オブジェクトを補間する。補間は、下記で詳説するように、誤りのある出力オブジェクト30の両方の側の隣接する出力オブジェクト30に基づく。同じモデルMiで画像418の集合を区分することが目的であるとき、AAM補間はAAMモデルの使用の最適化を処理することが認識される。
図10を参照すると、同様の要素は図4で与えられた要素と類似の参照番号及び記述を有する。システム410は、更に、補間モジュール1000を有する。補間モジュール1000は、誤りのある出力オブジェクト30について位置及び/又は時間にわたって置換出力オブジェクトを補間する。補間は、下記で詳説するように、誤りのある出力オブジェクト30の両方の側の隣接する出力オブジェクト30に基づく。同じモデルMiで画像418の集合を区分することが目的であるとき、AAM補間はAAMモデルの使用の最適化を処理することが認識される。
画像418は、時間を通して撮像されたか又は異なるロケーションで撮像された同じ解剖を有することができる。この場合、画像418は、サーチ・モジュール428によって解析されたとき相互に平行である。画像418は獲得時間又はロケーションに従って配列され、I0...Inとして示される(図11aを参照)。尚、典型的な断面2D画像418(例えば、CT及びMR画像)について説明が行われることであるが、他の画像418、例えば、非限定的に、蛍光透視画像418についても応用可能である。
画像418の中のモデル・オブジェクトMのサーチは、モデル・オブジェクト画像(出力オブジェクト30)と画像418の中のターゲット・オブジェクト200との差が、例えば、非限定的に、次のパラメータを変化させることによって最小化される最適化プロセスであることは、文献から公知の事実である。
1.画像418の中のモデル・オブジェクトMiの位置。
2.モデル・オブジェクトMiのスケール(又はサイズ)。
3.モデル・オブジェクトMiの回転。
4.モデル・パラメータC(組み合わせ得点(Combined Score)とも呼ばれる)。これは、形状及びテクスチャの値を生成するために使用されるベクトルである。
現実の応用において、サーチ・モジュール428がモデル・オブジェクトMiを複数の隣接オブジェクト出力画像Ii(図11aを参照)へ適用するとき、次の意味で最適でない出力オブジェクトIiの選択されたものについて、幾つかの解を生成可能であることが認識される。
・ アルゴリズムが、グローバル最小値ではなくローカル最小値を識別する。
・ ターゲット・オブジェクト200の区分が、典型的に、空間的/時間的連続性を有する。これは、小さな誤差が存在するため、取得された区分の中で適切に表されないかも知れない。
1.画像418の中のモデル・オブジェクトMiの位置。
2.モデル・オブジェクトMiのスケール(又はサイズ)。
3.モデル・オブジェクトMiの回転。
4.モデル・パラメータC(組み合わせ得点(Combined Score)とも呼ばれる)。これは、形状及びテクスチャの値を生成するために使用されるベクトルである。
現実の応用において、サーチ・モジュール428がモデル・オブジェクトMiを複数の隣接オブジェクト出力画像Ii(図11aを参照)へ適用するとき、次の意味で最適でない出力オブジェクトIiの選択されたものについて、幾つかの解を生成可能であることが認識される。
・ アルゴリズムが、グローバル最小値ではなくローカル最小値を識別する。
・ ターゲット・オブジェクト200の区分が、典型的に、空間的/時間的連続性を有する。これは、小さな誤差が存在するため、取得された区分の中で適切に表されないかも知れない。
図11aを再び参照すると、注意されることは、出力オブジェクトI2、I3、及びI4が、隣接した出力オブジェクトI1及びInと比較して、誤った大きな特徴1002を有することである。更に、I4の中の特徴1002は間違った位置にある。補間モジュール1000(図10を参照)は、ローカル最小値を除去し、解の時間的/空間的連続性を向上して、図11bで示されるような補正出力オブジェクトO0...Onを提供することによって、出力オブジェクトI0...Inの区分の改善を助けるように使用される。補間モジュール1000によって実現されるアルゴリズムのステップ(図12を参照)は、次のとおりである。
1.1200で、初期出力オブジェクトI0...Inを生成するため、選択されたモデル・オブジェクトMを使用するサーチ・モジュール428によって、全ての画像418が画像シーケンス(時間的及び/又は空間的)へ区分される。1202で、各々の初期出力オブジェクトについて次の原初値が記憶される。例えば、非限定的に、
a.出力オブジェクトの位置
b.出力オブジェクトのサイズ
c.出力オブジェクトの回転
d.出力オブジェクトへ割り当てられる収束モデル・パラメータ
e.出力オブジェクトと画像418の中のターゲット・オブジェクトとの誤差(「平均誤差」を含む幾つかの誤差尺度を使用することができる)
2.図11aで示された例において、1204で、次の事項に基づいて幾つかの区分を拒絶する。
a.誤差が特定の閾値よりも大きい、及び/又は
b.1つ又は複数の出力オブジェクト・パラメータが、平均と比較されたとき、特定の公差の中にないか、又は最小正方形の線から離れすぎている(パラメータが所定の関係で、例えば線形に、変化しなければならない仮定が存在する場合に使用される)。
3.少なくとも2つの区分が拒絶されなかったと仮定すると、線形補間を実行するための出力オブジェクト30の例を提供するため、拒絶された出力オブジェクトIrの各々の上の区分は、次のように計算可能である。Ir(この場合はI2、I3、I4)の上の各々の拒絶された区分について、
a.1206で、0<1<r<u<nとして2つの隣接した出力オブジェクトI1及びIu(この場合はI1及びI5)を識別し(他の例は、I1=I0及びIu=Inであることが認識される)、次のようにする。
・ 出力オブジェクトI1及びIuの上の区分は拒絶されない。
・ IrとI1及びIrとIuとの間の画像の全ての区分が拒絶された。
これらの特性を有する1及びuを決定できなければ、Irの区分は改善され得ない。
b.1208で、定義された補間関係(例えば、非限定的に、線形)を使用して、モデル・パラメータC、位置、サイズ、及びロケーション、及びI1とIuとのそれらの間の角度が補間され、1210で、出力オブジェクトIrの入力パラメータとして使用される置換モデル・パラメータが生成される。
c.次に、サーチ・モジュール428が使用され、補間された置換モデル・パラメータを使用してモデル・オブジェクトMiを再適用し、図11bで示されるように、対応する新しい区分O2、O3、O4を生成する。
d.更に正規のAAMの幾つかのステップを実行して、前のステップで決定された解を最適化することができる(Cootesによるプレゼンテーションの「Iterative Model Refinement」のスライド又はStagmannによるプレゼンテーションの「Dynamic of simple AAM」のスライドを参照)。
1.1200で、初期出力オブジェクトI0...Inを生成するため、選択されたモデル・オブジェクトMを使用するサーチ・モジュール428によって、全ての画像418が画像シーケンス(時間的及び/又は空間的)へ区分される。1202で、各々の初期出力オブジェクトについて次の原初値が記憶される。例えば、非限定的に、
a.出力オブジェクトの位置
b.出力オブジェクトのサイズ
c.出力オブジェクトの回転
d.出力オブジェクトへ割り当てられる収束モデル・パラメータ
e.出力オブジェクトと画像418の中のターゲット・オブジェクトとの誤差(「平均誤差」を含む幾つかの誤差尺度を使用することができる)
2.図11aで示された例において、1204で、次の事項に基づいて幾つかの区分を拒絶する。
a.誤差が特定の閾値よりも大きい、及び/又は
b.1つ又は複数の出力オブジェクト・パラメータが、平均と比較されたとき、特定の公差の中にないか、又は最小正方形の線から離れすぎている(パラメータが所定の関係で、例えば線形に、変化しなければならない仮定が存在する場合に使用される)。
3.少なくとも2つの区分が拒絶されなかったと仮定すると、線形補間を実行するための出力オブジェクト30の例を提供するため、拒絶された出力オブジェクトIrの各々の上の区分は、次のように計算可能である。Ir(この場合はI2、I3、I4)の上の各々の拒絶された区分について、
a.1206で、0<1<r<u<nとして2つの隣接した出力オブジェクトI1及びIu(この場合はI1及びI5)を識別し(他の例は、I1=I0及びIu=Inであることが認識される)、次のようにする。
・ 出力オブジェクトI1及びIuの上の区分は拒絶されない。
・ IrとI1及びIrとIuとの間の画像の全ての区分が拒絶された。
これらの特性を有する1及びuを決定できなければ、Irの区分は改善され得ない。
b.1208で、定義された補間関係(例えば、非限定的に、線形)を使用して、モデル・パラメータC、位置、サイズ、及びロケーション、及びI1とIuとのそれらの間の角度が補間され、1210で、出力オブジェクトIrの入力パラメータとして使用される置換モデル・パラメータが生成される。
c.次に、サーチ・モジュール428が使用され、補間された置換モデル・パラメータを使用してモデル・オブジェクトMiを再適用し、図11bで示されるように、対応する新しい区分O2、O3、O4を生成する。
d.更に正規のAAMの幾つかのステップを実行して、前のステップで決定された解を最適化することができる(Cootesによるプレゼンテーションの「Iterative Model Refinement」のスライド又はStagmannによるプレゼンテーションの「Dynamic of simple AAM」のスライドを参照)。
図11a及び図11bを参照すると、最初の行において、各々のスライスの上で区分が独立に実行される。3つの中間スライスにおいて、区分は失敗し、ローカル最小値を選択し、次に、これらの区分は拒絶される。なぜなら、選択された閾値よりも誤差が大きいからである。下の行で示されるように、補間モジュールは、前述した補間アルゴリズムを使用して、これらのスライスの区分を回復することができる。
上記の説明は、単なる例を介する好ましい実施形態に関することが分かるであろう。システム10及び410の多くの変形が当業者に明らかであり、そのような明らかな変形は、明白に説明されたかどうかに関係なく、本明細書で説明及び請求される本発明の範囲の中にある。更に認識されることとして、ターゲット・オブジェクト200、モデル・オブジェクト(420、422)、出力オブジェクト30、画像418、トレーニング画像426、及びトレーニング・オブジェクト201を多次元要素として表すことができる。そのような多次元要素には、例えば、非限定的に、2D、3D、及び組み合わせられた空間及び/又は時間シーケンスが含まれる。
Claims (33)
- デジタル画像を解釈する統計外観モデルを有し、該外観モデルが少なくとも1つのモデル・パラメータを有する画像処理システムであって、
関連した第1の統計関係を含み、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第1のモデル・オブジェクト、及び関連した第2の統計関係を含み、変形してデジタル画像の中のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第2のモデル・オブジェクトであって、第1のモデル・オブジェクトとは異なった形状及びテクスチャ構成を有する第2のモデル・オブジェクトと、
第1のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第1の出力オブジェクトを生成し、第1の出力オブジェクトとターゲット・オブジェクトとの間の第1のモデル独立誤差を計算し、第2のモデル・オブジェクトを適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第2の出力オブジェクトを生成し、第2の出力オブジェクトとターゲット・オブジェクトとの間の第2のモデル独立誤差を計算するサーチ・モジュールと、
第1のモデル独立誤差と第2のモデル独立誤差とを比較して、最小有意モデル独立誤差を有する出力オブジェクトの1つが選択されるようにする選択モジュールと、
選択された出力オブジェクトを表すデータを出力へ提供する出力モジュールと
を備えるシステム。 - 第1のモデル・オブジェクトがターゲット・オブジェクトの第1のものを識別するように最適化され、第2のモデル・オブジェクトがターゲット・オブジェクトの第2のものを識別するように最適化され、第2のターゲット・オブジェクトが第1のターゲット・オブジェクトとは異なる形状及びテクスチャ構成を有する、請求項1に記載のシステム。
- 更に、デジタル画像の集合の1つであるデジタル画像を備え、モデル・オブジェクトの各々が、サーチ・モジュールによって集合のデジタル画像の各々へ適用されるように構成される、請求項2に記載のシステム。
- 更に、集合の中の全ての画像を表すため、モデル・オブジェクトの各々へ帰せられる使用頻度の得点に基づいて、オブジェクト・モデルの1つを選択するように構成された選択モジュールを備える、請求項3に記載のシステム。
- 出力が、メモリの中に記憶される出力ファイル及びユーザ・インタフェースを含むグループから選択される、請求項1に記載のシステム。
- 更に、トレーニング・モジュールを備え、該トレーニング・モジュールが、異なった外観構成を有する複数のトレーニング・オブジェクトを含むトレーニング画像の集合を有するように構成され、トレーニング・モジュールが外観モデルをトレーニングして、該外観モデルが、それぞれのターゲット・オブジェクトの形状及びテクスチャの有効範囲を識別するように最適化された複数のモデル・オブジェクトを有するようにする、請求項2に記載のシステム。
- 外観モデルが能動外観モデルである、請求項2に記載のシステム。
- 第1及び第2のモデル・オブジェクトが患者の解剖の異なる病理タイプを表す、請求項2に記載のシステム。
- 第1及び第2のモデル・オブジェクトが、解剖の画像容積の間隔を空けられたロケーションから取られた2つの異なる2次元スライスの同じ解剖の異なる外観構成を表す、請求項2に記載のシステム。
- 2つの異なる病理タイプが、トレーニング画像の集合の中の2つの異なるトレーニング・オブジェクトによって表される、請求項8に記載のシステム。
- 更に、選択されたモデル・オブジェクトのモデル・パラメータに関連づけられた所定の特性を備え、該所定の特性が、選択された出力オブジェクトによって表された解剖を有する患者の診断を助け、モデル・パラメータが、ポーズによって起こされた変形を表す、請求項1に記載のシステム。
- モデル・パラメータが複数の値領域へ分割され、各々の領域が複数の所定の特性の1つを割り当てられる、請求項11に記載のシステム。
- モデル・パラメータが、形状及びテクスチャのパラメータ、スケール・パラメータ、及び回転パラメータを含むグループから選択される、請求項12に記載のシステム。
- 所定の特性の少なくとも2つが、解剖の異なる病理タイプを表す、請求項12に記載のシステム。
- 出力モジュールが、選択された出力オブジェクトへ割り当てられた所定の特性を出力へ提供する、請求項12に記載のシステム。
- 更に、複数の所定の特性をモデル・パラメータへ割り当てるように構成されたトレーニング・モジュールを備える、請求項12に記載のシステム。
- 更に、選択された出力オブジェクトへ割り当てられたモデル・パラメータの値が、分割された領域の1つの中にあるかどうかを決定する確認モジュールを備える、請求項15に記載のシステム。
- 全ての分割された値領域の外側にあるときのモデル・パラメータの値が、第1の出力オブジェクトがターゲット・オブジェクトの無効な近似であることを示す、請求項17に記載のシステム。
- デジタル画像のシーケンスを解釈する統計外観モデルを有し、該外観モデルが少なくとも1つのモデル・パラメータを有する画像処理システムであって、
関連した統計関係を含む多次元モデル・オブジェクトであって、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成されたモデル・オブジェクトと、
モデル・オブジェクトを選択して画像へ適用し、ターゲット・オブジェクトの形状及びテクスチャに近似する多次元出力オブジェクトの対応するシーケンスを生成するサーチ・モジュールであって、出力オブジェクト及びターゲット・オブジェクトの各々の間の誤差を計算するサーチ・モジュールと、
シーケンスの隣接した出力オブジェクトの間で期待される所定の変形に基づいて、出力オブジェクトのシーケンスの中の少なくとも1つの無効な出力オブジェクトを認識する補間モジュールであって、前記無効な出力オブジェクトが原初のモデル・パラメータを有する補間モジュールと、
出力オブジェクトのシーケンスを表すデータを出力へ提供する出力モジュールと
を備えるシステム。 - 更に、シーケンスの隣接して境界となる出力オブジェクトのペアから、補間されたモデル・パラメータを計算する補間モジュールの補間アルゴリズムを備え、前記ペアが無効な出力オブジェクトの両側に位置し、補間されたモデル・パラメータが原初のモデル・パラメータを置換する、請求項19に記載のシステム。
- 補間されたモデル・パラメータが、位置、スケール、回転、及び形状とテクスチャを含むグループから選択される、請求項20に記載のシステム。
- 無効な出力オブジェクトの決定が、所定のパラメータ閾値の外側にある原初のモデル・パラメータに基づく、請求項20に記載のシステム。
- 無効な出力オブジェクトの決定が、所定の誤差閾値の外側にある第1の誤差に基づく、請求項20に記載のシステム。
- 複数の隣接した無効な出力オブジェクトが存在する、請求項20に記載のシステム。
- 補間アルゴリズムの補間が所定の補間関係に基づき、該所定の補間関係が、シーケンスの中の境界となる出力オブジェクトのペアと無効な出力オブジェクトとの間の分離の大きさに基づく、請求項20に記載のシステム。
- 新しい出力オブジェクトを生成してシーケンスの中の無効な出力オブジェクトを置換するため、サーチ・モジュールが、補間されたモデル・パラメータを入力として使用して、第1のモデル・オブジェクトを画像へ再適用する、請求項20に記載のシステム。
- シーケンスが、時間及び空間を含むグループから選択される、請求項19に記載のシステム。
- 少なくとも1つのモデル・パラメータを有する統計外観モデルでデジタル画像を解釈する方法であって、
関連した第1の統計関係を含み、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第1のモデル・オブジェクトを提供し、
関連した第2の統計関係を含み、変形してデジタル画像の中のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第2のモデル・オブジェクトを提供し、第2のモデル・オブジェクトが第1のモデル・オブジェクトとは異なる形状及びテクスチャ構成を有し、
第1のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第1の出力オブジェクトを生成し、
第1の出力オブジェクトとターゲット・オブジェクトとの間の第1のモデル独立誤差を計算し、
第2のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第2の出力オブジェクトを生成し、
第2の出力オブジェクトとターゲット・オブジェクトとの間の第2のモデル独立誤差を計算し、
第1のモデル独立誤差と第2のモデル独立誤差とを比較して、最小有意モデル独立誤差を有する出力オブジェクトの1つが選択されるようにし、
選択された出力オブジェクトを表すデータを出力へ提供する
方法。 - 少なくとも1つのモデル・パラメータを有する統計外観モデルを使用してデジタル画像を解釈するコンピュータ・プログラム製品であって、
コンピュータ読み取り可能媒体と、
コンピュータ読み取り可能媒体に記憶されたオブジェクト・モジュールであって、関連した第1の統計関係を含み、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第1のモデル・オブジェクト、及び関連した第2の統計関係を含み、変形してデジタル画像の中のターゲット・オブジェクトの形状及びテクスチャに近似するように構成された多次元の第2のモデル・オブジェクトを有するように構成されたオブジェクト・モジュールと、
コンピュータ読み取り可能媒体に記憶されたサーチ・モジュールであって、第1のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第1の出力オブジェクトを生成し、第1の出力オブジェクトとターゲット・オブジェクトとの間の第1のモデル独立誤差を計算し、第2のモデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元の第2の出力オブジェクトを生成し、第2の出力オブジェクトとターゲット・オブジェクトとの間の第2のモデル独立誤差を計算し、第2のモデル・オブジェクトが、第1のモデル・オブジェクトとは異なる形状及びテクスチャ構成を有するサーチ・モジュールと、
サーチ・モジュールへ結合され、第1のモデル独立誤差と第2のモデル独立誤差とを比較して、最小有意モデル独立誤差を有する出力オブジェクトの1つが選択されるようにする選択モジュールと、
選択モジュールへ結合され、選択された出力オブジェクトを表すデータを出力へ提供する出力モジュールと
を備えるコンピュータ・プログラム製品。 - 少なくとも1つのモデル・パラメータを有する統計外観モデルでデジタル画像を解釈する方法であって、
関連した統計関係を含む多次元モデル・オブジェクトを提供し、該モデル・オブジェクトが、変形してデジタル画像の中の多次元ターゲット・オブジェクトの形状及びテクスチャに近似するように構成され、
モデル・オブジェクトを画像へ適用してターゲット・オブジェクトの形状及びテクスチャに近似する多次元出力オブジェクトの対応するシーケンスを生成し、
出力オブジェクト及びターゲット・オブジェクトの各々の間の誤差を計算し、
シーケンスの隣接した出力オブジェクトの間で期待される所定の変形に基づいて、出力オブジェクトのシーケンスの中の少なくとも1つの無効な出力オブジェクトを認識し、該無効な出力オブジェクトが原初のモデル・パラメータを有し、
出力オブジェクトのシーケンスを表すデータを出力へ提供する
方法。 - 更に、画像のシーケンスの中の選択されたデジタル画像へ適用されている多次元モデル・オブジェクトの異なるものを適用するステップを含む、請求項30に記載の方法。
- 更に、多次元モデル・オブジェクトの異なるものの各々について、使用頻度の得点を計算するステップを含む、請求項31に記載の方法。
- 更に、デジタル画像に含まれる解剖情報を補足する患者情報に基づいて、第1のモデル・オブジェクトか第2のモデル・オブジェクトを選択するステップを含む、請求項28に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CA2004/000134 WO2005073914A1 (en) | 2004-01-30 | 2004-01-30 | System and method for applying active appearance models to image analysis |
| US10/767,727 US20050169536A1 (en) | 2004-01-30 | 2004-01-30 | System and method for applying active appearance models to image analysis |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007520002A true JP2007520002A (ja) | 2007-07-19 |
Family
ID=34807727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006549798A Pending JP2007520002A (ja) | 2004-01-30 | 2004-01-30 | 能動外観モデルを画像解析へ応用するシステム及び方法 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US20050169536A1 (ja) |
| EP (1) | EP1714249A1 (ja) |
| JP (1) | JP2007520002A (ja) |
| KR (1) | KR20070004662A (ja) |
| CN (1) | CN1926573A (ja) |
| AU (1) | AU2004314699A1 (ja) |
| CA (1) | CA2554814A1 (ja) |
| MX (1) | MXPA06008578A (ja) |
| WO (1) | WO2005073914A1 (ja) |
| ZA (1) | ZA200606298B (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4949264B2 (ja) * | 2004-11-19 | 2012-06-06 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 医療画像データ内の腫瘍境界を自動的に検出及び区分するシステム及び方法 |
| US7773789B2 (en) * | 2005-08-30 | 2010-08-10 | Siemens Medical Solutions Usa, Inc. | Probabilistic minimal path for automated esophagus segmentation |
| US7916971B2 (en) | 2007-05-24 | 2011-03-29 | Tessera Technologies Ireland Limited | Image processing method and apparatus |
| US20100266182A1 (en) * | 2007-11-12 | 2010-10-21 | Koninklijke Philips Electronics N.V. | Apparatus for determining a parameter of a moving object |
| US8750578B2 (en) | 2008-01-29 | 2014-06-10 | DigitalOptics Corporation Europe Limited | Detecting facial expressions in digital images |
| US20110194741A1 (en) * | 2008-10-07 | 2011-08-11 | Kononklijke Philips Electronics N.V. | Brain ventricle analysis |
| KR101194604B1 (ko) | 2008-12-22 | 2012-10-25 | 한국전자통신연구원 | 인체 모델의 형상 변형 방법 및 장치 |
| US8260814B2 (en) * | 2009-09-17 | 2012-09-04 | Erkki Heilakka | Method and an arrangement for concurrency control of temporal data |
| US8831301B2 (en) * | 2009-09-25 | 2014-09-09 | Intellectual Ventures Fund 83 Llc | Identifying image abnormalities using an appearance model |
| US20110080402A1 (en) * | 2009-10-05 | 2011-04-07 | Karl Netzell | Method of Localizing Landmark Points in Images |
| EP2538388B1 (en) * | 2011-06-20 | 2015-04-01 | Alcatel Lucent | Method and arrangement for image model construction |
| US9104908B1 (en) * | 2012-05-22 | 2015-08-11 | Image Metrics Limited | Building systems for adaptive tracking of facial features across individuals and groups |
| US9111134B1 (en) | 2012-05-22 | 2015-08-18 | Image Metrics Limited | Building systems for tracking facial features across individuals and groups |
| US9928635B2 (en) | 2012-09-19 | 2018-03-27 | Commonwealth Scientific And Industrial Research Organisation | System and method of generating a non-rigid model |
| US9740710B2 (en) * | 2014-09-02 | 2017-08-22 | Elekta Inc. | Systems and methods for segmenting medical images based on anatomical landmark-based features |
| US10706321B1 (en) * | 2016-05-20 | 2020-07-07 | Ccc Information Services Inc. | Image processing system to align a target object in a target object image with an object model |
| JP6833444B2 (ja) * | 2016-10-17 | 2021-02-24 | キヤノン株式会社 | 放射線撮影装置、放射線撮影システム、放射線撮影方法、及びプログラム |
| CN106846338A (zh) * | 2017-02-09 | 2017-06-13 | 苏州大学 | 基于混合模型的视网膜oct图像视乳头结构分割方法 |
| CN108367161B (zh) * | 2017-06-05 | 2022-04-22 | 西安大医集团股份有限公司 | 放疗系统、数据处理方法及存储介质 |
| US10346724B2 (en) * | 2017-06-22 | 2019-07-09 | Waymo Llc | Rare instance classifiers |
| US11048921B2 (en) | 2018-05-09 | 2021-06-29 | Nviso Sa | Image processing system for extracting a behavioral profile from images of an individual specific to an event |
| US12475367B2 (en) | 2018-05-09 | 2025-11-18 | Beemotion.Ai Ltd | Image processing system for extracting a behavioral profile from images of an individual specific to an event |
| US10949649B2 (en) | 2019-02-22 | 2021-03-16 | Image Metrics, Ltd. | Real-time tracking of facial features in unconstrained video |
| DE102019114012A1 (de) * | 2019-05-24 | 2020-11-26 | Carl Zeiss Microscopy Gmbh | Mikroskopieverfahren, Mikroskop und Computerprogramm mit Verifikationsalgorithmus für Bildverarbeitungsergebnisse |
| DE102019217524A1 (de) * | 2019-11-13 | 2021-05-20 | Siemens Healthcare Gmbh | Verfahren und Bildverarbeitungsvorrichtung zum Segmentieren von Bilddaten und Computerprogrammprodukt |
| CN111161406B (zh) * | 2019-12-26 | 2023-04-14 | 江西博微新技术有限公司 | Gim文件可视化处理方法、系统、可读存储介质及计算机 |
| CN112307942B (zh) * | 2020-10-29 | 2024-06-28 | 广东富利盛仿生机器人股份有限公司 | 一种面部表情量化表示方法、系统及介质 |
| CN116524135B (zh) * | 2023-07-05 | 2023-09-15 | 方心科技股份有限公司 | 一种基于图像的三维模型生成方法及系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04148384A (ja) * | 1990-10-11 | 1992-05-21 | Mitsubishi Electric Corp | 辞書照合方式 |
| JPH07284090A (ja) * | 1994-04-08 | 1995-10-27 | Olympus Optical Co Ltd | 画像分類装置 |
| JPH10500321A (ja) * | 1994-03-31 | 1998-01-13 | アーチ ディヴェロプメント コーポレイション | 医用コンピュータ断層撮影スキャンで病変を検出するための自動化された方法およびシステム |
| JP2000306095A (ja) * | 1999-04-16 | 2000-11-02 | Fujitsu Ltd | 画像照合・検索システム |
| JP2002517867A (ja) * | 1998-06-08 | 2002-06-18 | ワシントン ユニバーシティ | 自動形状特徴付けのための方法および装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6106466A (en) * | 1997-04-24 | 2000-08-22 | University Of Washington | Automated delineation of heart contours from images using reconstruction-based modeling |
| US5926568A (en) * | 1997-06-30 | 1999-07-20 | The University Of North Carolina At Chapel Hill | Image object matching using core analysis and deformable shape loci |
| US6111983A (en) * | 1997-12-30 | 2000-08-29 | The Trustees Of Columbia University In The City Of New York | Determination of image shapes using training and sectoring |
| US6741756B1 (en) * | 1999-09-30 | 2004-05-25 | Microsoft Corp. | System and method for estimating the orientation of an object |
| US7058210B2 (en) * | 2001-11-20 | 2006-06-06 | General Electric Company | Method and system for lung disease detection |
-
2004
- 2004-01-30 JP JP2006549798A patent/JP2007520002A/ja active Pending
- 2004-01-30 KR KR1020067017542A patent/KR20070004662A/ko not_active Withdrawn
- 2004-01-30 CA CA002554814A patent/CA2554814A1/en not_active Abandoned
- 2004-01-30 US US10/767,727 patent/US20050169536A1/en not_active Abandoned
- 2004-01-30 EP EP04706585A patent/EP1714249A1/en not_active Withdrawn
- 2004-01-30 AU AU2004314699A patent/AU2004314699A1/en not_active Abandoned
- 2004-01-30 WO PCT/CA2004/000134 patent/WO2005073914A1/en not_active Ceased
- 2004-01-30 CN CNA2004800423674A patent/CN1926573A/zh active Pending
- 2004-01-30 MX MXPA06008578A patent/MXPA06008578A/es not_active Application Discontinuation
-
2006
- 2006-07-28 ZA ZA200606298A patent/ZA200606298B/xx unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04148384A (ja) * | 1990-10-11 | 1992-05-21 | Mitsubishi Electric Corp | 辞書照合方式 |
| JPH10500321A (ja) * | 1994-03-31 | 1998-01-13 | アーチ ディヴェロプメント コーポレイション | 医用コンピュータ断層撮影スキャンで病変を検出するための自動化された方法およびシステム |
| JPH07284090A (ja) * | 1994-04-08 | 1995-10-27 | Olympus Optical Co Ltd | 画像分類装置 |
| JP2002517867A (ja) * | 1998-06-08 | 2002-06-18 | ワシントン ユニバーシティ | 自動形状特徴付けのための方法および装置 |
| JP2000306095A (ja) * | 1999-04-16 | 2000-11-02 | Fujitsu Ltd | 画像照合・検索システム |
Non-Patent Citations (1)
| Title |
|---|
| JPN6009037225, Edwards,外2名, "Learning to Identify and Track Faces in Image Sequences", Automatic Face and Gesture Recognition, 1998. Proceedings. Third IEEE International Conference on, 19980414, p. 260−265, US, IEEE Computer Society * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1926573A (zh) | 2007-03-07 |
| WO2005073914A1 (en) | 2005-08-11 |
| EP1714249A1 (en) | 2006-10-25 |
| US20050169536A1 (en) | 2005-08-04 |
| MXPA06008578A (es) | 2007-01-25 |
| AU2004314699A1 (en) | 2005-08-11 |
| CA2554814A1 (en) | 2005-08-11 |
| KR20070004662A (ko) | 2007-01-09 |
| ZA200606298B (en) | 2009-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007520002A (ja) | 能動外観モデルを画像解析へ応用するシステム及び方法 | |
| Gilbert et al. | Generating synthetic labeled data from existing anatomical models: an example with echocardiography segmentation | |
| US7876934B2 (en) | Method of database-guided segmentation of anatomical structures having complex appearances | |
| JP4633736B2 (ja) | 画像内の対象の検出方法 | |
| Puyol-Antón et al. | Regional multi-view learning for cardiac motion analysis: application to identification of dilated cardiomyopathy patients | |
| CN111862249A (zh) | 使用深度学习生成用于医学图像处理的规范成像数据的系统和方法 | |
| Duchateau et al. | A spatiotemporal statistical atlas of motion for the quantification of abnormal myocardial tissue velocities | |
| US20070036414A1 (en) | Method for database guided simultaneous multi slice object detection in three dimensional volumetric data | |
| US10019804B2 (en) | Medical image processing apparatus, method, and program | |
| US11403761B2 (en) | Probabilistic motion model for generating medical images or medical image sequences | |
| JP2004509723A (ja) | クロス・エントロピー最適化による画像位置合わせシステム及び方法 | |
| US8879810B2 (en) | Method and system for automatic lung segmentation in magnetic resonance imaging videos | |
| EP1135748A1 (en) | Image processing method and system for following a moving object in an image sequence | |
| WO2021146497A1 (en) | Trackerless 2d ultrasound frame to 3d image volume registration | |
| Zhang et al. | Novel indices for left-ventricular dyssynchrony characterization based on highly automated segmentation from real-time 3-D echocardiography | |
| Glocker et al. | Dense registration with deformation priors | |
| CN100507947C (zh) | 利用外观和形状来检测和匹配解剖结构的系统和方法 | |
| Kumar et al. | Cardiac disease detection from echocardiogram using edge filtered scale-invariant motion features | |
| US12430762B2 (en) | Robust shape determination for cardiac anatomy in medical imaging | |
| Werys et al. | Displacement field calculation from CINE MRI using non-rigid image registration | |
| Chen et al. | Multimodal MRI neuroimaging with motion compensation based on particle filtering | |
| Yang | Deformable Models and Machine Learning for Large-Scale Cardiac MRI Image Analytics | |
| Petrovic et al. | Simultaneous registration, segmentation and modelling of structure in groups of medical images | |
| Nilsson | Automated Segmentation of Cardiac Magnetic Resonance Images | |
| Puyol-Antón et al. | Regional Multi-view Learning for Cardiac Motion Analysis |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090728 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091028 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091105 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100323 |