JP2008019902A - 直動アクチュエータ - Google Patents
直動アクチュエータ Download PDFInfo
- Publication number
- JP2008019902A JP2008019902A JP2006190233A JP2006190233A JP2008019902A JP 2008019902 A JP2008019902 A JP 2008019902A JP 2006190233 A JP2006190233 A JP 2006190233A JP 2006190233 A JP2006190233 A JP 2006190233A JP 2008019902 A JP2008019902 A JP 2008019902A
- Authority
- JP
- Japan
- Prior art keywords
- pinion
- motor
- transmission mechanisms
- lead screws
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 39
- 230000005540 biological transmission Effects 0.000 claims abstract description 38
- 238000010586 diagram Methods 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H2025/2046—Screw mechanisms with gears arranged perpendicular to screw shaft axis, e.g. helical gears engaging tangentially the screw shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H2025/2053—Screws in parallel arrangement driven simultaneously with an output member moved by the screws
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/15—Intermittent grip type mechanical movement
- Y10T74/1503—Rotary to intermittent unidirectional motion
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gear Transmission (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
【課題】要求仕様に柔軟に対応した減速比に基づく減速を可能にして、モータ出力に対して大きな出力が得られる構成を提供する。
【解決手段】モータ出力軸に1個のピニオンを固定し、かつ、同一構成の複数の伝達機構を備える。この伝達機構のそれぞれは、ピニオンに噛み合うギアを固定したリードスクリュー両端を軸受によって支持して回転可能に構成する。複数の伝達機構のリードスクリューのネジ溝にそれぞれ噛み合う複数のネジ穴を設けた可動ナットを備え、モータが回転するとき、ピニオン及びギアを介して、複数のリードスクリューを互いに同一方向に回転させて、可動ナットを直動駆動させる。
【選択図】図1
【解決手段】モータ出力軸に1個のピニオンを固定し、かつ、同一構成の複数の伝達機構を備える。この伝達機構のそれぞれは、ピニオンに噛み合うギアを固定したリードスクリュー両端を軸受によって支持して回転可能に構成する。複数の伝達機構のリードスクリューのネジ溝にそれぞれ噛み合う複数のネジ穴を設けた可動ナットを備え、モータが回転するとき、ピニオン及びギアを介して、複数のリードスクリューを互いに同一方向に回転させて、可動ナットを直動駆動させる。
【選択図】図1
Description
本発明は、モータの回転を直動運動に変換して出力して、例えば、自動車電装用途等に用いる直動アクチュエータに関する。
図4は、従来の直動アクチュエータの構成を示す図である(特許文献1参照)。図示の直動アクチュエータは、それぞれリードスクリューとギアからなる第1と第2の伝達機構を有している。第1の伝達機構は、端部にモータの出力軸を連結している。両伝達機構はそれぞれが備えるギアを噛み合わせることにより、モータ駆動力によって第1の伝達機構が回転すると、第2の伝達機構はギアを介して駆動力が伝達されて回転することができる。モータの出力軸に連結された第1の伝達機構は、モータ回転方向と同方向に回転するのに対して、ギアを介して駆動力が伝達される第2の伝達機構は、第1の伝達機構とは逆方向に回転する。これによって、両伝達機構の間に連結されている出力機構をスラスト方向に駆動させることができる。
このように、図示の直動アクチュエータは、モータの出力軸に第1の伝達機構を直接連結しているために、大出力を得るためにはモータの出力を大きくすることが必要である。両伝達機構間の連結は、各伝達機構に備えられたギアを介して行われるが、大出力を得ようとしてモータの出力を上げるとギアの歯に掛かる応力も大きくなり欠歯等の不具合の可能性も高くなる。2つのギアには互いに回転方向に対し反力(逃げようとする力)が掛かると同時に、2本のリードスクリューには出力機構のギアに対する反力が掛かるため伝達機構を支持する軸受に横方向のラジアル荷重が掛かることとなる。したがって軸受の耐久性に問題が起こる可能性があった。また、この第1及び第2の伝達機構は、各々違う部品で構成されているために、コスト的に見ても、各部品の共通化が難しく高価な機構となる。
実開昭63−195152号公報
本発明は、係る問題点を解決して、要求仕様に柔軟に対応した減速比に基づく減速を可能にして、モータ出力に対して大きな出力が得られる構成を提供することを目的としている。
また、本発明によれば、複数の伝達機構の部品及び構成を共通化して、安価なユニットを構築するだけでなく、減速機構を備えることによるピニオンヘの歯元応力の低減、複数の伝達機構への力の分散、及びモータ軸受に対するラジアル荷重の低減を図ることを目的としている。
本発明の直動アクチュエータは、モータの回転を直動運動に変換して出力する。モータ出力軸に1個のピニオンを固定し、かつ、少なくとも2セットの同一構成の複数の伝達機構を備える。この伝達機構のそれぞれは、ピニオンに噛み合うギアを固定したリードスクリュー両端を軸受によって支持して回転可能に構成する。複数の伝達機構のリードスクリューのネジ溝にそれぞれ噛み合う複数のネジ穴を設けた可動ナットを備え、モータが回転するとき、ピニオン及びギアを介して、複数のリードスクリューを互いに同一方向に回転させて、該複数のリードスクリューに噛み合う可動ナットを直動駆動させる。
また、複数の伝達機構は、モータ出力軸に固定された前記ピニオンの回りに対称に配置することができる。可動ナットには、先端に外部負荷に結合されている出力ワイヤ或いは出力棒材が固定される。
本発明によれば、モータ出力軸にピニオンを固定したことにより伝達機構に対し減速が可能となることから、モータ出力に対し大きな出力が得られ、これによって、小型化及び高出力が得られる事となる。
また、減速比を変えることにより要求仕様に柔軟に対応でき、モータ自体の特性は共通化が出来る。減速機構を備えることにより、ピニオンヘの歯元応力の低減が可能となる。1個のピニオンに対し伝達機構を複数備えることにより力の分散が可能となり、モータ軸受に対するラジアル荷重が相殺される。さらに、複数備える伝達機構のために、ギア、リードスクリュー、及びラジアル軸受を共通化して、安価なユニットを構築できる。
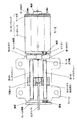
以下、例示に基づき本発明を説明する。図1は、本発明を具体化する直動アクチュエータの全体構成を一部断面で示す図である。図示したモータ自体は、通常のものであり、有底筒状のモータケースの開口部にケース蓋を嵌合することにより構成したモータハウジングを有している。このモータハウジング内には、固定子及び回転子が収容され、回転子のシャフトは、モータケース底面の中央及びケース蓋の中央にそれぞれ備えられた軸受によって回転可能に支持されている。ケース蓋からは、一対のモータ端子が延長している。この一対のモータ端子から電力を供給することによりモータは回転する。
図示のモータはフレーム上に固定されて、モータケースの底部中央からは、回転子シャフトの一端が、モータ出力軸としてフレーム端部を通ってモータ外部に伸び、このモータ出力軸にピニオンが圧入等により固定されている。
一方、互いに同一構成の第1及び第2のリードスクリューは、それぞれその両端側を除いて、通常に螺旋状のネジが切られている。この第1及び第2のリードスクリューの一方の端にはそれぞれ、同一構成の第1及び第2のギアが圧入等により固定されている。第1及び第2のリードスクリューに噛み合う可動ナットが、樹脂或いは金属により構成されている。言い替えると、この可動ナットには、第1と第2のリードスクリューに噛み合う各1個の合計2個のネジ穴が設けられている。図示の2本のリードスクリューが互いに同一回転速度で同一方向に回転するとき、その回転方向に応じて図中の右或いは左方向に、可動ナットはリードスクリュー上を直動駆動される。この可動ナットには、そこに設けた出力ワイヤ係合用穴に、直動駆動すべき外部負荷に連結された出力ワイヤ或いは出力棒材が固定される。なお、2本のリードスクリュー及びネジ穴を例として説明したが、一般的には、2本或いはそれ以上のリードスクリューを用いることができ、この場合、ネジ穴はリードスクリューと同数となる。
このように構成された第1及び第2のリードスクリューは、それぞれその両端が軸受により回転可能に支持される。図示の例において、第1及び第2のリードスクリューの一方の側(図中の右側)のそれぞれの軸受は、フレーム端部に支持され、かつ他方の側(図中の左側)の軸受は、フレーム端部に固定されている。
これら軸受は、通常構成のいかなる軸受も用いることができる。図中左側の軸受は、リードスクリュー先端側に位置した鋼球を収容するものとして例示している。鋼球は、外部負荷(図示省略)を出力ワイヤにより引っ張り駆動する場合にリードスクリュー先端側に掛かるスラスト荷重を支えるためのものである。或いは、出力ワイヤに代えて出力棒材を用いて外部負荷を押す方向に駆動する場合には、モータ側のフレーム端部に設けた軸受でスラスト荷重を支える必要がある。このように、出力ワイヤ或いは出力棒材の先にどのような用途の外部負荷が結合されているかに応じて、リードスクリューのいずれかの側は、ラジアル方向だけでなくスラスト方向にも軸受けする必要がある。
直動アクチュエータにおいて、モータが所定の方向に回転する時、モータ出力軸に固定されたピニオンを介して、第1のギア及び第2のギアは、互いに同一方向に、かつ、モータとは逆方向に回転する。これによって、第1及び第2のリードスクリューが互いに同一方向に回転して、それに噛み合う可動ナットを、例えば、図中のモータ側に移動させる。この可動ナットに連結されている出力ワイヤが、引っ張られることにより、外部負荷を駆動する。次に、モータ回転を反転させる時、可動ナットは反対側に移動する。このとき、出力ワイヤが撓まないようにバネ(図示省略)を用いて出力ワイヤを、図中の左方向に引っ張るように構成しておく。
図2は、ピニオンとギアの相対位置関係を説明する図である。図2(A)は、ギアとピニオンからなる伝達機構を2セット使用し、かつ伝達機構とモータ出力ピニオンを直線上に配置した例を示している。第1と第2の2個のギアは、ピニオンを中心として180°相対する両側位置に配置される。これによって、各伝達機構に掛かるラジアル荷重を相殺して、軸受等の高寿命化を図ることができる。但し、図2(B)に示すように、2個のギアを180°相対する位置で無くても、ある程度のラジアル荷重を相殺することは可能となる。図2(C)は、伝達機構を3セット使用した例を示している。図示の第1〜第3の3個のギアは、ピニオンの回りに等間隔(120°間隔)に配置されており、これによって、各伝達機構のギア部に掛かるラジアル荷重を相殺して、軸受等の高寿命化を図ることができる。
図2(A)〜(C)のいずれの場合も、モータ出力軸に固定されたピニオンがいずれかの方向に回転するとき、このピニオンに噛み合う互いに同一構成の複数のギアは、互いに全て同一方向に、かつ、ピニオンとは反対方向に回転する。
図3(A)は、本発明による動力伝達を説明する図であり、図3(B)は、対比のために従来技術による動力伝達を説明する図である。図3(B)に示す従来技術構成は、第1のギアがモータ出力軸に固定されており、この第1のギアに噛み合う第2のギアが備えられている。このため、両ギアが噛み合う位置の荷重作用点で、互いのギアに掛かる力の反力が生じ、この反力がモータ出力軸に対して横方向(ラジアル方向)に掛かる構造となっている。
これに対して、本発明は、図3(A)に示すように、モータ出力軸にピニオンを固定し、そこから第1及び第2のギアを介しリードスクリューに動力が伝わる構成となる。このとき、第1及び第2のギア及びリードスクリューは互いに同一方向に回転する。このため、第1及び第2のリードスクリュー及びギアは同一部品で良く、設備の共有化が図れることに加えて、両方のギアをピニオンに対して対称に配置しておくことにより、両ギアから生じる反力を打ち消すことが可能となる。本発明の構成は、モータ出力軸に固定されたピニオンが回転すると、それに噛み合う2つのギアは共にピニオンとは反対方向に回転する。そして、ピニオンから第1のギア及び第2のギアに対する荷重作用点はピニオン両側の対称位置に生じ、それぞれの反力は方向反対となる。これによって、モータ軸受けのラジアル荷重は、相殺されて0となるため、モータ軸受の耐磨耗性向上が得られる。
また、本発明による構成は、ピニオンとギアによる減速が可能となり、これによって、高出力を得ることが可能な構成となっている。従ってモータを含めたユニットの小型化、省電力化のメリットがある。さらに、減速比を変えることにより特性変更が可能となるため、モータ部の標準化が容易となる。
Claims (3)
- モータの回転を直動運動に変換して出力する直動アクチュエータにおいて、
モータ出力軸に1個のピニオンを固定し、
少なくとも2セットの同一構成の複数の伝達機構を備え、
前記複数の伝達機構のそれぞれは、前記ピニオンに噛み合うギアを固定したリードスクリュー両端を軸受によって支持して回転可能に構成し、
前記複数の伝達機構のリードスクリューのネジ溝にそれぞれ噛み合う複数のネジ穴を設けた可動ナットを備え、
前記モータが回転するとき、前記ピニオン及び前記ギアを介して、前記複数のリードスクリューを互いに同一方向に回転させて、該複数のリードスクリューに噛み合う前記可動ナットを直動駆動させる、
ことから成る直動アクチュエータ。 - 前記複数の伝達機構が、前記モータ出力軸に固定された前記ピニオンの回りに対称に配置される請求項1に記載の直動アクチュエータ。
- 前記可動ナットには、先端に外部負荷に結合されている出力ワイヤ或いは出力棒材が固定される請求項1に記載の直動アクチュエータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006190233A JP2008019902A (ja) | 2006-07-11 | 2006-07-11 | 直動アクチュエータ |
| US11/775,397 US20080015084A1 (en) | 2006-07-11 | 2007-07-10 | Longitudinal motion actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006190233A JP2008019902A (ja) | 2006-07-11 | 2006-07-11 | 直動アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008019902A true JP2008019902A (ja) | 2008-01-31 |
Family
ID=38949950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006190233A Pending JP2008019902A (ja) | 2006-07-11 | 2006-07-11 | 直動アクチュエータ |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20080015084A1 (ja) |
| JP (1) | JP2008019902A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013050156A (ja) * | 2011-08-30 | 2013-03-14 | Seiko Epson Corp | 駆動力伝達機構 |
| JP2018537188A (ja) * | 2015-11-30 | 2018-12-20 | ストライカー・コーポレイション | 伸縮ノーズ機構を有する手術器具 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4816686B2 (ja) * | 2008-06-06 | 2011-11-16 | ソニー株式会社 | 走査駆動回路 |
| WO2012101462A1 (en) * | 2011-01-24 | 2012-08-02 | Kongsberg Automotive Ab | Gear change actuator |
| ITBS20120042A1 (it) * | 2012-03-22 | 2013-09-23 | Gimatic Spa | Attuatore lineare elettrico |
| CN104486572A (zh) * | 2014-12-20 | 2015-04-01 | 佛山振宣精密科技工业有限公司 | 一种电视机背板同时攻螺孔装置 |
| CN104639857A (zh) * | 2014-12-20 | 2015-05-20 | 佛山振宣精密科技工业有限公司 | 一种攻螺孔装置 |
| CN108011472B (zh) * | 2017-12-28 | 2019-11-05 | 国网山东省电力公司青州市供电公司 | 一种双向电动推杆 |
| CN110939707A (zh) * | 2018-09-21 | 2020-03-31 | 苏州芙路德润滑科技有限公司 | 一种双直驱丝杆模组 |
| CN109595317B (zh) * | 2018-12-03 | 2024-08-13 | 厦门奥瑞塔科技有限公司 | 一种平面运动结构 |
| US11320031B2 (en) * | 2020-06-03 | 2022-05-03 | Battelle Energy Alliance, Llc | Linear differential |
| CN114233829B (zh) * | 2021-12-24 | 2023-09-29 | 北京精密机电控制设备研究所 | 一种差动反向式行星滚柱丝杠副 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE29919877U1 (de) * | 1999-11-11 | 2001-03-15 | Dewert Antriebs- und Systemtechnik GmbH & Co KG, 32278 Kirchlengern | Elektromotorische Verstelleinrichtung |
| JP2001343058A (ja) * | 2000-03-30 | 2001-12-14 | Thk Co Ltd | 幅広構造の駆動装置 |
| TW521031B (en) * | 2001-04-27 | 2003-02-21 | Mitsubishi Heavy Ind Ltd | Ball screw device and injection molding machine incorporating the same |
-
2006
- 2006-07-11 JP JP2006190233A patent/JP2008019902A/ja active Pending
-
2007
- 2007-07-10 US US11/775,397 patent/US20080015084A1/en not_active Abandoned
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013050156A (ja) * | 2011-08-30 | 2013-03-14 | Seiko Epson Corp | 駆動力伝達機構 |
| JP2018537188A (ja) * | 2015-11-30 | 2018-12-20 | ストライカー・コーポレイション | 伸縮ノーズ機構を有する手術器具 |
| JP2021176554A (ja) * | 2015-11-30 | 2021-11-11 | ストライカー・コーポレイション | 伸縮ノーズ機構を有する手術器具 |
| JP7154350B2 (ja) | 2015-11-30 | 2022-10-17 | ストライカー・コーポレイション | 伸縮ノーズ機構を有する手術器具 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080015084A1 (en) | 2008-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20080015084A1 (en) | Longitudinal motion actuator | |
| JP6088945B2 (ja) | チェンソーのチェーン張力調整装置 | |
| JP5286202B2 (ja) | 回転−直動変換機構およびアクチュエータ | |
| JP4931725B2 (ja) | 波動歯車装置 | |
| CN110770472B (zh) | 旋转致动器以及直动致动器 | |
| JP2019100460A (ja) | 遊星歯車減速機構 | |
| CN102072293A (zh) | 减速机构及其采用的传动装置 | |
| US11041542B2 (en) | Power transmission mechanism | |
| CN102767592A (zh) | 少齿差啮合式齿轮减速器 | |
| JP4847744B2 (ja) | モータ付直交軸減速機、直交軸減速機、及び、ロボットの関節構造 | |
| JP2004301273A (ja) | 減速機 | |
| JP2005348501A (ja) | ギヤドモータのシリーズ及びギヤドモータの製造方法 | |
| JP2009014025A (ja) | ねじロッドがスライド移動する装置。 | |
| JP2010048352A (ja) | クラッチ機構、クラッチ付減速機、および減速機付モータ | |
| JP2004168211A (ja) | 電気式車輪駆動装置 | |
| JP4531408B2 (ja) | 多段減速機 | |
| JP5130194B2 (ja) | 動力伝達装置 | |
| CN100394069C (zh) | 正交动力传递装置 | |
| JP4651022B2 (ja) | 減速機 | |
| JP2009150489A (ja) | 入力側軸の構造を改良した直交減速機 | |
| JP2007127165A (ja) | 遊星回転体の支持構造 | |
| JP4731395B2 (ja) | 電動リニアアクチュエータ | |
| JP2007127156A (ja) | 遊星歯車動力伝達装置 | |
| JP5966873B2 (ja) | 減速機付きモータ | |
| JP2006112520A (ja) | 電動式直動アクチュエータ |