JP2008024235A - 車両 - Google Patents
車両 Download PDFInfo
- Publication number
- JP2008024235A JP2008024235A JP2006201159A JP2006201159A JP2008024235A JP 2008024235 A JP2008024235 A JP 2008024235A JP 2006201159 A JP2006201159 A JP 2006201159A JP 2006201159 A JP2006201159 A JP 2006201159A JP 2008024235 A JP2008024235 A JP 2008024235A
- Authority
- JP
- Japan
- Prior art keywords
- center
- gravity
- vehicle
- vehicle body
- weight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】旋回限界値を大きくすることが可能な横置き二輪の車両を提供する。
【解決手段】横置き二輪車両の旋回時における対策として、旋回限界値を把握する旋回限界推定システム、及び旋回限界値を向上させる重心位置調整システムを備える。旋回限界推定システムでは、重心位置と横方向加速度を高精度で推定することで旋回限界値及び旋回安定度を把握する。重心位置調整システムでは、推定した重心位置を向心力方向に移動させることで、旋回限界値を上げる。重心を移動させる機構として、i)車体の傾斜機構、ii)ウェイト(おもり)の移動機構、iii)シートの平行移動機構のうちの1つ以上が使用される。これにより、横置き二輪車両、特に、二輪間が狭く、重心位置が高い車両であっても、より速く、小さく曲がることが可能になり、旋回動作の走行性能、安定性、安全性の向上が図られる。
【選択図】図13
【解決手段】横置き二輪車両の旋回時における対策として、旋回限界値を把握する旋回限界推定システム、及び旋回限界値を向上させる重心位置調整システムを備える。旋回限界推定システムでは、重心位置と横方向加速度を高精度で推定することで旋回限界値及び旋回安定度を把握する。重心位置調整システムでは、推定した重心位置を向心力方向に移動させることで、旋回限界値を上げる。重心を移動させる機構として、i)車体の傾斜機構、ii)ウェイト(おもり)の移動機構、iii)シートの平行移動機構のうちの1つ以上が使用される。これにより、横置き二輪車両、特に、二輪間が狭く、重心位置が高い車両であっても、より速く、小さく曲がることが可能になり、旋回動作の走行性能、安定性、安全性の向上が図られる。
【選択図】図13
Description
本発明は、車両に係り、例えば、互いに対抗配置された2つの駆動輪を有する横置き二輪車両の旋回走行時の姿勢制御に関する。
倒立振り子の姿勢制御を利用した車両(以下、単に倒立振り子車両という)が注目され、現在実用化されつつある。
例えば、同軸上に配置された2つの駆動輪を有し、運転者の重心移動による駆動輪の姿勢を感知して駆動する技術が特許文献1で提案されている。
また、従来の円形状の駆動輪1つや、球体状の駆動輪1つの姿勢を制御しながら移動する車両が特許文献2で提案され、また、特許文献2においても各種倒立振り子車両について指摘されている。
例えば、同軸上に配置された2つの駆動輪を有し、運転者の重心移動による駆動輪の姿勢を感知して駆動する技術が特許文献1で提案されている。
また、従来の円形状の駆動輪1つや、球体状の駆動輪1つの姿勢を制御しながら移動する車両が特許文献2で提案され、また、特許文献2においても各種倒立振り子車両について指摘されている。
このような、車両では、運転者による体重移動量、リモコンや操縦装置からの操作量、予め入力された走行指令データ等に基づいて、姿勢制御を行いながら停車状態を維持したり走行したりするようになっている。
そして、車輪を操舵したり、2つの駆動輪に差動トルクを与えたりすることで、車両の旋回を行うようになっている。
そして、車輪を操舵したり、2つの駆動輪に差動トルクを与えたりすることで、車両の旋回を行うようになっている。
しかし、一般的な乗用車と比べて、このような1人用車両は小型であり、左右輪の間隔は狭い。また、車両全体の重量に対する乗員の重量の割合は大きく、その乗員の着座姿勢を確保すると、車両全体の重心位置は高くなる。
したがって、このような車両が旋回走行するとき、その旋回速度が高すぎると、あるいは、旋回半径が小さすぎると、遠心力によって車両が過度に傾く可能性がある。また、横転まで至らなくても、内輪側の接地荷重が小さくなるために、内輪がスリップする可能性がある。
このように、旋回性能には限界があるため、その限界値に応じた制限値を設定し、その範囲内で旋回させるようにしている。
このように、旋回性能には限界があるため、その限界値に応じた制限値を設定し、その範囲内で旋回させるようにしている。
ところが、乗員が着座位置や着座姿勢を変えたり、異なる体型の人が乗ったりすると、旋回速度や旋回曲率(旋回半径の逆数)の限界値も変化する。このため、安全を考慮すると、想定される条件変化の範囲内で最も厳しい条件に対応した制限値を設定する必要があり、各条件に適した高い制限値を設定することができなかった。
なお、搭乗物が全く無い場合や、任意の荷物を乗せて自動走行するような場合であっても同様の課題が存在する。
なお、搭乗物が全く無い場合や、任意の荷物を乗せて自動走行するような場合であっても同様の課題が存在する。
そこで本発明は、旋回限界値(旋回速度、旋回曲率の最大値)、及びその制限値を大きくすることが可能な横置き二輪の車両を提供することを目的とする。
(1)請求項1記載の発明では、互いに対向配置された2つの駆動輪を含む車両であって、重量体を乗せる搭乗部と、重心位置を取得する重心位置取得手段と、車軸に対して水平方向の加速度成分である横方向加速度を取得する横方向加速度取得手段と、前記取得した重心位置と横方向加速度の大きさに応じて、前記重心位置の左右方向の移動量を決定する移動量決定手段と、前記決定した重心位置の移動量に従って、前記重心位置を移動させる重心移動手段と、を車両に具備させて前記目的を達成する。
(2)請求項2に記載した発明では、請求項1に記載の車両において、前記2つの駆動輪それぞれの回転速度を取得する回転速度取得手段を備え、前記横方向加速度取得手段は、前記取得した2つの駆動輪の各回転速度を用いて前記横方向加速度を算出する、ことを特徴とする。
(3)請求項3に記載した発明では、請求項1に記載の車両において、車両に配設された加速度計を備え、前記横方向加速度取得手段は、前記加速度計による測定値を用いて横方向加速度を算出する、ことを特徴とする。
(4)請求項4に記載した発明では、請求項1、請求項2又は請求項3に記載の車両において、前記搭乗部に配置された荷重センサと、前記重量体の高さを測定する高さセンサと、を備え、前記重心位置取得手段は、前記荷重センサ及び前記高さセンサの検出値から、重心位置を取得する、ことを特徴とする。
(5)請求項5に記載した発明では、請求項1、請求項2又は請求項3に記載の車両において、前記重心位置取得手段は、外乱オブザーバを使用して重心位置を取得する、ことを特徴とする。
(6)請求項6に記載した発明では、請求項1、請求項2又は請求項3に記載の車両において、前記搭乗部に配置された荷重センサと、前記重量体の高さを測定する高さセンサと、前記荷重センサ及び前記高さセンサの検出値から、重心位置を取得する直接取得手段と、重心位置を外乱オブザーバにより取得する間接取得手段と、を備え、前記重心位置取得手段は、前記直接取得手段及び間接取得手段による取得値に基づいて、重心位置を取得する、ことを特徴とする。
(7)請求項7に記載した発明では、請求項1から請求項6のうちのいずれか1の請求項に記載の車両において、前記重心移動手段は、前記左右方向に車体を傾斜させる車体傾斜手段と、前記左右方向にウェイトを移動させるウェイト移動手段と、前記左右方向に前記搭乗部を移動させる搭乗部移動手段、のうちの少なくとも1つを備えることを特徴とする。
(8)請求項8に記載した発明では、請求項7に記載の車両において、前記重心移動手段は、前記車体傾斜手段と、前記ウェイト移動手段と、前記搭乗部移動手段のうちの2つ以上を備え、前記移動量決定手段は、前記決定した重心の移動量を、前記重心移動手段が備える、前記車体傾斜手段と、前記ウェイト移動手段と、前記搭乗部移動手段のうちの2つ以上に分配する分配手段を備える、ことを特徴とする。
(9)請求項9に記載した発明では、請求項8に記載の車両において、前記分配手段は、前記決定した重心の移動量の周波数成分に基づいて分配する、ことを特徴とする。
(2)請求項2に記載した発明では、請求項1に記載の車両において、前記2つの駆動輪それぞれの回転速度を取得する回転速度取得手段を備え、前記横方向加速度取得手段は、前記取得した2つの駆動輪の各回転速度を用いて前記横方向加速度を算出する、ことを特徴とする。
(3)請求項3に記載した発明では、請求項1に記載の車両において、車両に配設された加速度計を備え、前記横方向加速度取得手段は、前記加速度計による測定値を用いて横方向加速度を算出する、ことを特徴とする。
(4)請求項4に記載した発明では、請求項1、請求項2又は請求項3に記載の車両において、前記搭乗部に配置された荷重センサと、前記重量体の高さを測定する高さセンサと、を備え、前記重心位置取得手段は、前記荷重センサ及び前記高さセンサの検出値から、重心位置を取得する、ことを特徴とする。
(5)請求項5に記載した発明では、請求項1、請求項2又は請求項3に記載の車両において、前記重心位置取得手段は、外乱オブザーバを使用して重心位置を取得する、ことを特徴とする。
(6)請求項6に記載した発明では、請求項1、請求項2又は請求項3に記載の車両において、前記搭乗部に配置された荷重センサと、前記重量体の高さを測定する高さセンサと、前記荷重センサ及び前記高さセンサの検出値から、重心位置を取得する直接取得手段と、重心位置を外乱オブザーバにより取得する間接取得手段と、を備え、前記重心位置取得手段は、前記直接取得手段及び間接取得手段による取得値に基づいて、重心位置を取得する、ことを特徴とする。
(7)請求項7に記載した発明では、請求項1から請求項6のうちのいずれか1の請求項に記載の車両において、前記重心移動手段は、前記左右方向に車体を傾斜させる車体傾斜手段と、前記左右方向にウェイトを移動させるウェイト移動手段と、前記左右方向に前記搭乗部を移動させる搭乗部移動手段、のうちの少なくとも1つを備えることを特徴とする。
(8)請求項8に記載した発明では、請求項7に記載の車両において、前記重心移動手段は、前記車体傾斜手段と、前記ウェイト移動手段と、前記搭乗部移動手段のうちの2つ以上を備え、前記移動量決定手段は、前記決定した重心の移動量を、前記重心移動手段が備える、前記車体傾斜手段と、前記ウェイト移動手段と、前記搭乗部移動手段のうちの2つ以上に分配する分配手段を備える、ことを特徴とする。
(9)請求項9に記載した発明では、請求項8に記載の車両において、前記分配手段は、前記決定した重心の移動量の周波数成分に基づいて分配する、ことを特徴とする。
本発明では、重心位置と横方向加速度を取得し、その値に応じて、重心位置の左右方向の移動量を決定し、決定した重心位置の移動量に従って、重心位置を移動させる
構成としたので、旋回限界値や制限値を大きくすることが可能になる。
構成としたので、旋回限界値や制限値を大きくすることが可能になる。
以下、本発明の車両における好適な実施の形態について、図1から図19を参照して詳細に説明する。
(1)実施形態の概要
旋回走行時において、車両の接地荷重中心点が両駆動輪間の外側に移動すると、その車両は横転する。
ここで、接地荷重中心点は、車両に作用する遠心力と重力との合力ベクトルFに平行で重心を通る直線と、地面との交点を表す。このとき、合力ベクトルFの向きは、車両の横方向加速度によって決定され、さらに、横方向加速度は,車両の旋回速度と旋回曲率によって決定される。
したがって、接地荷重中心点の位置、すなわち、車両が横転するか否かは、車両の重心位置と横方向加速度(旋回速度と旋回曲率)によって決定される。
そして、車両の重心位置を向心方向(旋回円の中心に向かう方向)へ動かせば、車両の旋回限界値は向上する。
(1)実施形態の概要
旋回走行時において、車両の接地荷重中心点が両駆動輪間の外側に移動すると、その車両は横転する。
ここで、接地荷重中心点は、車両に作用する遠心力と重力との合力ベクトルFに平行で重心を通る直線と、地面との交点を表す。このとき、合力ベクトルFの向きは、車両の横方向加速度によって決定され、さらに、横方向加速度は,車両の旋回速度と旋回曲率によって決定される。
したがって、接地荷重中心点の位置、すなわち、車両が横転するか否かは、車両の重心位置と横方向加速度(旋回速度と旋回曲率)によって決定される。
そして、車両の重心位置を向心方向(旋回円の中心に向かう方向)へ動かせば、車両の旋回限界値は向上する。
本実施形態では、横置き二輪車両の旋回限界向上の手段として、(a)旋回限界値を把握する旋回限界推定システム、及び(b)旋回限界値を向上させる重心位置調整システムを備える。
(a)旋回限界推定システムでは、車両の重心位置を高精度で推定することで旋回限界値を把握する。また、車両の横方向加速度を推定または測定することで、現在の走行状態を把握する。
重心位置の推定については、荷重計と座高計の測定値から、搭乗物(乗員や荷物等)の着座位置、重量、体型を測定し、その測定値から車両の重心位置(車体対称面からのズレ、高さ)を推定(直接推定)すると共に、横方向車体傾斜制御の制御履歴から外乱オブザーバを使用して重心位置を推定する(間接推定)。
一方、横方向加速度(遠心力の大きさ)については、各輪の回転速度計と加速度センサから決定する。
(a)旋回限界推定システムでは、車両の重心位置を高精度で推定することで旋回限界値を把握する。また、車両の横方向加速度を推定または測定することで、現在の走行状態を把握する。
重心位置の推定については、荷重計と座高計の測定値から、搭乗物(乗員や荷物等)の着座位置、重量、体型を測定し、その測定値から車両の重心位置(車体対称面からのズレ、高さ)を推定(直接推定)すると共に、横方向車体傾斜制御の制御履歴から外乱オブザーバを使用して重心位置を推定する(間接推定)。
一方、横方向加速度(遠心力の大きさ)については、各輪の回転速度計と加速度センサから決定する。
(b)重心位置調整システムでは、推定した重心位置を向心方向(旋回円の中心方向)に移動させることで、旋回限界値を上げる。
すなわち、接地荷重中心点Sが両駆動輪間の内側で、安定した旋回走行が可能な位置となるように重心を移動させる。
重心を移動させる機構として、i)車体の傾斜機構、ii)ウェイト(おもり)の移動機構、iii)シートの平行移動機構のうちの1つ以上が使用される。
重心移動機構を複数使用する場合には、各機構の周波数特性による使い分け、及び/又は重心移動量の周波数成分による各機構への配分を行う。
これにより、本実施形態では、横置き二輪車両であっても、より速く、小さく曲がることが可能になり、旋回動作の走行性能、安定性、安全性の向上が図られる。
すなわち、接地荷重中心点Sが両駆動輪間の内側で、安定した旋回走行が可能な位置となるように重心を移動させる。
重心を移動させる機構として、i)車体の傾斜機構、ii)ウェイト(おもり)の移動機構、iii)シートの平行移動機構のうちの1つ以上が使用される。
重心移動機構を複数使用する場合には、各機構の周波数特性による使い分け、及び/又は重心移動量の周波数成分による各機構への配分を行う。
これにより、本実施形態では、横置き二輪車両であっても、より速く、小さく曲がることが可能になり、旋回動作の走行性能、安定性、安全性の向上が図られる。
なお、本明細書では、表記の都合上、図面とは表記を変えている。例えば、d(→∧)やθ(・・)のように、文字の後のカッコ内の記号のうち、「→」はベクトル量(行列)であることを表し「∧」は推定値であることを表し、また「・」と「・・」はカッコの前の文字に対する1階及び2階の時間微分を表すものとする。
(2)実施形態の詳細
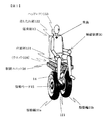
図1は、本実施形態における車両の外観構成を例示したものである。
図1に示されるように、車両は、同軸上に配置された2つの駆動輪11a、11bを備えている。
両駆動輪11a、11bは、それぞれ駆動モータ12で駆動されるようになっている。
図1は、本実施形態における車両の外観構成を例示したものである。
図1に示されるように、車両は、同軸上に配置された2つの駆動輪11a、11bを備えている。
両駆動輪11a、11bは、それぞれ駆動モータ12で駆動されるようになっている。
駆動輪11a、11b(以下、両駆動輪11aと11bを指す場合には駆動輪11という)及び駆動モータ12の上部には、重量体である荷物や乗員等が搭乗する搭乗する搭乗部13(シート)が配置されている。
搭乗部13は、運転者が座る座面部131、背もたれ部132、及びヘッドレスト133で構成されている。
搭乗部13は、運転者が座る座面部131、背もたれ部132、及びヘッドレスト133で構成されている。
搭乗部13は、駆動モータ12が収納されている駆動モータ筐体121に固定された支持部材14により支持されている。
搭乗部13の左脇には操縦装置30が配置されている。この操縦装置30は、運転者の操作により、車両の加速、減速、旋回、その場回転(信地回転)、停止、制動等の指示を行う為のものである。
本実施形態における操縦装置30は、座面部131に固定されているが、有線又は無線で接続されたリモコンにより構成するようにしてもよい。また、肘掛けを設けその上部に操縦装置30を配置するようにしてもよい。
また、本実施形態の車両には、操縦装置30が配置されているが、予め決められた走行指令データに従って自動走行する車両の場合には、操縦装置30に代えて走行指令データ取得部が配設される。走行指令データ取得部は、例えば、半導体メモリ等の各種記憶媒体から走行指令データを読み取る読み取り手段で構成し、または/及び、無線通信により外部から走行指令データを取得する通信制御手段で構成するようにしてもよい。
なお、図1において、搭乗部13には人が搭乗している場合について表示しているが、必ずしも人が運転する車両には限定されず、荷物だけを乗せて外部からのリモコン操作等により走行や停止をさせる場合、荷物だけを乗せて走行指令データに従って走行や停止をさせる場合、更には何も搭乗していない状態で走行や停止をする場合であってもよい。
本実施形態において、操縦装置30の操作により出力される操作信号によって加減速等の制御が行われるが、例えば、特許文献1に示されるように、運転者が車両に対する前傾きモーメントや前後の傾斜角を変更することで、その傾斜角に応じた車両の姿勢制御及び走行制御を行うようにしてもよい。また、両方式を切り替え可能にしてもよい。
搭乗部13の下側(座面部131裏面側)には、図示しないが後述する荷重計51が配置されている。
また、搭乗部の背面(背もたれ部の表側)には、図示しないが後述する座高計52が配置されている。
また、搭乗部の背面(背もたれ部の表側)には、図示しないが後述する座高計52が配置されている。
また、搭乗部13と駆動輪11との間には、図示しないが後述するウェイト(おもり)134が配置されている。このウェイト134は、後述するウェイト駆動アクチュエータ63によって左右方向(車軸に平行な方向)に移動可能に構成されている。
搭乗部13と駆動輪11との間には制御ユニット16が配置されている。
本実施形態において制御ユニット16は、搭乗部13の座面部131の下面に取り付けられているが、支持部材14に取り付けるようにしてもよい。
本実施形態において制御ユニット16は、搭乗部13の座面部131の下面に取り付けられているが、支持部材14に取り付けるようにしてもよい。
図2は、制御ユニット16の構成を表したものである。
制御ユニット16は、車両の走行、姿勢制御、及び本実施形態における旋回時の走行制御等の各種制御を行う制御ECU(電子制御装置)20を備えており、この制御ECU20には、操縦装置30、走行,姿勢制御用センサ40、重心位置測定用センサ50、アクチュエータ60、及びバッテリ等のその他の装置が電気的に接続されている。
制御ユニット16は、車両の走行、姿勢制御、及び本実施形態における旋回時の走行制御等の各種制御を行う制御ECU(電子制御装置)20を備えており、この制御ECU20には、操縦装置30、走行,姿勢制御用センサ40、重心位置測定用センサ50、アクチュエータ60、及びバッテリ等のその他の装置が電気的に接続されている。
バッテリは、駆動モータ12、アクチュエータ60、制御ECU20等に電力を供給するようになっている。
制御ECU20は、走行制御プログラム、姿勢制御プログラム、本実施形態における旋回制御処理プログラム等の各種プログラムやデータが格納されたROM、作業領域として使用されるRAM、外部記憶装置、インターフェイス部等を備えたコンピュータシステムで構成されている。
制御ECU20は、車体走行制御システム21と重心位置制御システム23を備えている。
車体走行制御システム21は、車両の前後方向の加減速を制御する前後加減速機能と、車両を旋回させる旋回機能を実現するように構成され、旋回機能を実現するため横方向加速度決定システム22を備えている。
車体走行制御システム21は、姿勢制御を行うと共に、操縦装置30から供給される前後方向及び旋回の指示に対応した指令値を車輪駆動アクチュエータ61に供給するようになっている。
車体走行制御システム21は、車両の前後方向の加減速を制御する前後加減速機能と、車両を旋回させる旋回機能を実現するように構成され、旋回機能を実現するため横方向加速度決定システム22を備えている。
車体走行制御システム21は、姿勢制御を行うと共に、操縦装置30から供給される前後方向及び旋回の指示に対応した指令値を車輪駆動アクチュエータ61に供給するようになっている。
横方向加速度決定システム22は、走行,姿勢制御用センサ44から供給される両駆動輪11a、11bの車輪回転角、及び/又は並進加速度から、横方向加速度aを算出し、重心位置制御システム23に供給するようになっている。
重心位置制御システム23は、外乱オブザーバ24と重心位置推定システム25を備えている。
外乱オブザーバ24は、供給された横方向加速度aと車体傾斜角θ1の計測値から外乱を推定することで搭乗物(乗員等)の重心位置を推定(間接推定)し、重心位置推定システム25に推定値を供給する。
外乱オブザーバ24は、供給された横方向加速度aと車体傾斜角θ1の計測値から外乱を推定することで搭乗物(乗員等)の重心位置を推定(間接推定)し、重心位置推定システム25に推定値を供給する。
重心位置推定システム25は、供給された横方向加速度と荷重分布、座高の測定値から搭乗物の種別(人、荷物、無し)を判定し、その種別に応じて搭乗物の重心ズレと高さを推定(直接推定)する。
また重心位置推定システム25は、直接推定、及び間接推定による重心位置ズレと高さから、車両の重心位置を決定する。
また重心位置推定システム25は、直接推定、及び間接推定による重心位置ズレと高さから、車両の重心位置を決定する。
重心位置制御システム23は、推定した重心位置と横方向加速度の大きさに応じた車体傾斜角、ウェイト位置、搭乗部位置の目標値を決定し、実際の車両の情報がそれと一致するように、対応する指令値をアクチュエータ60に供給する。
操縦装置30はコントローラ31を備えており、運転者の操作に基づいて車両走行の目標値を制御ECU20に供給するようになっている。
走行,姿勢制御用センサ40は、車輪回転角を検出する車輪回転計41と、車両の並進加速度を検出する加速度計42、及び横方向の車体傾斜角(ロール角)を検出する車体傾斜角度計43を備えている。
走行,姿勢制御用センサ40による検出値は、車体走行制御システム21、及び横方向加速度決定システム22に供給される。
走行,姿勢制御用センサ40による検出値は、車体走行制御システム21、及び横方向加速度決定システム22に供給される。
重心位置測定用センサ50は、乗員(搭乗物)の重心位置を推定(直接推定)するのに使用する、荷重計(又は荷重分布計)と座高計(又は形状測定器)を備えている。
図3は、荷重計51と座高計52の配置について表したものである。
図3に示されるように、荷重計51は搭乗部13の下側、具体的には座面部131の下面部に配置されている。
荷重計51は、シート上の荷重分布(偏心)を測定し、測定値を重心位置推定システム25に供給するようになっている。
図3は、荷重計51と座高計52の配置について表したものである。
図3に示されるように、荷重計51は搭乗部13の下側、具体的には座面部131の下面部に配置されている。
荷重計51は、シート上の荷重分布(偏心)を測定し、測定値を重心位置推定システム25に供給するようになっている。
荷重計51は、搭乗部13の下側(シート構造よりも下側)に配置することで、搭乗部に配置された搭乗物だけでなく、背もたれ部132やヘッドレスト133に掛けられた荷物の荷重や、その他の箇所に配置された全ての搭乗物の荷重を測定可能に構成されている。
荷重計51は、後述する搭乗部移動機構よりも上に設置され、搭乗部13と共に移動するようになっている。
なお、車体の重量(以下車体重量という)と、その重心位置(以下車体重心位置という)は固定されており、設計時に予め決定してあるので、荷重計51の計測対象外である。
荷重計51は、後述する搭乗部移動機構よりも上に設置され、搭乗部13と共に移動するようになっている。
なお、車体の重量(以下車体重量という)と、その重心位置(以下車体重心位置という)は固定されており、設計時に予め決定してあるので、荷重計51の計測対象外である。
本実施形態では、荷重計51として、3軸の成分を測定可能な荷重計を3つ以上配置している。
荷重計51は、荷重分布と同時に重量を測定し、それを搭乗物の判別や重心位置調整システムの目標位置(角度)設定に使用する。
荷重計51は、荷重分布と同時に重量を測定し、それを搭乗物の判別や重心位置調整システムの目標位置(角度)設定に使用する。
搭乗物の重心位置を推定するためには、荷重計を横方向に2つ設置すればよいが、3つ以上の荷重計を設置することで、フェイルセーフを実現している(荷重計が1つ壊れても計測可能)。
また、3軸成分測定可能な荷重計を使用し、さらに、横方向加速度と横方向車体傾斜角のデータを利用することにより、旋回時や車体傾斜時での重心ズレの推定も可能にしている。
また、3軸成分測定可能な荷重計を使用し、さらに、横方向加速度と横方向車体傾斜角のデータを利用することにより、旋回時や車体傾斜時での重心ズレの推定も可能にしている。
図3に示されるように、座高計52は、背もたれ部132に配設されている。
座高計52は、移動型(走査型)の光センサを鉛直方向(高さ方向)に走査することで搭乗物の高さ(上位のの座高)を測定するようになっている。これにより高精度な測定が可能になる。測定値は、重心位置推定システム25に供給される
なお、複数の固定型センサを鉛直方向に配置し、搭乗物の高さを離散的に測定するようにしてもよい。
座高計52は、移動型(走査型)の光センサを鉛直方向(高さ方向)に走査することで搭乗物の高さ(上位のの座高)を測定するようになっている。これにより高精度な測定が可能になる。測定値は、重心位置推定システム25に供給される
なお、複数の固定型センサを鉛直方向に配置し、搭乗物の高さを離散的に測定するようにしてもよい。
なお、本実施形態の座高計52では、複数の光センサを水平方向に配設することで搭乗物が大きく横にずれたときでも高さの測定を可能にするのと共に、1つが故障しても他の光センサの測定値を使用することでフェイルセーフを実現している。
また、本実施形態の座高計52によって、搭乗物の形状を推定し、その種類の判別(人、荷物、無し)に利用することも可能である。
なお、重心位置に関する情報が得られるのであれば、他の測定器で代用するようにしてもよい。
例えば、図3(d)に示されるように、ねじりトルク測定器で重心ズレを測定することができる。ただし、この場合には、搭乗物の質量を測定するために、荷重計を1つだけ設置する必要がある。
例えば、図3(d)に示されるように、ねじりトルク測定器で重心ズレを測定することができる。ただし、この場合には、搭乗物の質量を測定するために、荷重計を1つだけ設置する必要がある。
図2において、アクチュエータ60は、車体走行制御システム21から供給される指令値に従って駆動輪11を駆動する車体駆動アクチュエータ61を備えている。
アクチュエータ60は、更に、重心位置制御システム23から供給される指令値に従って、車体傾斜機構を制御する車体傾斜アクチュエータ62、ウェイト移動機構を制御するウェイト移動アクチュエータ63、及び、シートの平行移動機構を制御する搭乗部移動アクチュエータ64を備えている。
なお、各機構については、後で述べる。
アクチュエータ60は、更に、重心位置制御システム23から供給される指令値に従って、車体傾斜機構を制御する車体傾斜アクチュエータ62、ウェイト移動機構を制御するウェイト移動アクチュエータ63、及び、シートの平行移動機構を制御する搭乗部移動アクチュエータ64を備えている。
なお、各機構については、後で述べる。
以上のように構成された1実施形態としての車両における旋回限界向上制御処理について、次に説明する。
図4は、旋回限界向上制御処理の内容を表したフローチャートである。
制御ECU20の横方向加速度決定システム25は、走行,姿勢制御用センサ40の車輪回転計41から各駆動輪11a、11bの車輪回転角を取得すると共に、加速度計42から並進加速度を取得する。そして、これらのデータから車体の横方向加速度aを決定し、重心位置制御システム23に供給する(ステップ11)。
図4は、旋回限界向上制御処理の内容を表したフローチャートである。
制御ECU20の横方向加速度決定システム25は、走行,姿勢制御用センサ40の車輪回転計41から各駆動輪11a、11bの車輪回転角を取得すると共に、加速度計42から並進加速度を取得する。そして、これらのデータから車体の横方向加速度aを決定し、重心位置制御システム23に供給する(ステップ11)。
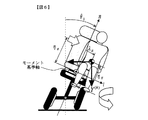
図5は、車体を傾けながら旋回するときの車両の力学的状態を表したものである。
横方向加速度aの測定は、(1)各輪(駆動輪11a、11b)の車輪回転計41(角度計)の測定値を使用する方法と、(2)加速度計42の測定値を使用する方法がある。
横方向加速度aの測定は、(1)各輪(駆動輪11a、11b)の車輪回転計41(角度計)の測定値を使用する方法と、(2)加速度計42の測定値を使用する方法がある。
(1)車輪回転計41の測定値を使用する方法
この方法は、左右駆動輪11a、11bの回転速度から、横方向加速度a(1)を算出する。
図5(a)に示されるように、乗員からみて右側の駆動輪11aの回転周速度をVR、左側の駆動輪11bの回転周速度をVLとすると、乗員(搭乗物)の重心位置Pにおける横方向加速度a(1)は次の数式1及び数式2から算出される。
この方法は、左右駆動輪11a、11bの回転速度から、横方向加速度a(1)を算出する。
図5(a)に示されるように、乗員からみて右側の駆動輪11aの回転周速度をVR、左側の駆動輪11bの回転周速度をVLとすると、乗員(搭乗物)の重心位置Pにおける横方向加速度a(1)は次の数式1及び数式2から算出される。
(数式1)
a(1)=V・ΔV/D
a(1)=V・ΔV/D
(数式2)
V=VM−(YG/D)ΔV
VM=(1/2)(VR+VL)
ΔV=VR−VL
VR=RWωWR
VL=RWωWL
V=VM−(YG/D)ΔV
VM=(1/2)(VR+VL)
ΔV=VR−VL
VR=RWωWR
VL=RWωWL
なお、数式2における各記号は次の通りである。
ωWR:右輪回転角速度
ωWL:左輪回転角速度
RW:タイヤ接地半径
D:トレッド
YG:実質重心位置のズレ(1つ前の時間ステップでの値を利用)
ωWR:右輪回転角速度
ωWL:左輪回転角速度
RW:タイヤ接地半径
D:トレッド
YG:実質重心位置のズレ(1つ前の時間ステップでの値を利用)
(2)加速度計42の測定値を使用する方法
この方法は、加速度計42で測定される並進加速度の値から、横方向加速度a〜(2)を算出する。
図5(b)に示されるように、車体中心軸をn軸、車体対称面に垂直な軸をt軸とし、an,atをセンサ加速度(各軸方向成分)、θ1を車体傾斜角とするとき、センサ取り付け位置における横方向加速度a〜(2)は次の数式3から算出される。
この方法は、加速度計42で測定される並進加速度の値から、横方向加速度a〜(2)を算出する。
図5(b)に示されるように、車体中心軸をn軸、車体対称面に垂直な軸をt軸とし、an,atをセンサ加速度(各軸方向成分)、θ1を車体傾斜角とするとき、センサ取り付け位置における横方向加速度a〜(2)は次の数式3から算出される。
(数式3)
a〜(2)=atcosθ1+ansinθ1
a〜(2)=atcosθ1+ansinθ1
本実施形態では、車輪回転計41の測定値に基づく横方向加速度a(1)と、加速度計42の測定値に基づく横方向加速度a〜(2)から、横方向加速度aを決定する。
車体走行制御システム21は、駆動輪がスリップしているか否かを判断し、スリップしていないと判断した場合には、車輪回転計41の測定値に基づく値a(1)を横方向加速度aとし、スリップしていると判断した場合には、加速度計42の測定値に基づく値a〜(2)を横方向加速度aとする。
車体走行制御システム21は、駆動輪がスリップしているか否かを判断し、スリップしていないと判断した場合には、車輪回転計41の測定値に基づく値a(1)を横方向加速度aとし、スリップしていると判断した場合には、加速度計42の測定値に基づく値a〜(2)を横方向加速度aとする。
以下に、本実施形態における駆動輪のスリップ判断について説明する。
初めに、車体走行制御システム21は、次の数式4によって、車輪回転計41の測定値に基づく乗員重心位置での横方向加速度a(1)から、センサ取り付け位置での横方向加速度a〜(1)を算出する。
なお、下記数式4におけるhSAは、車体傾斜の回転中心から加速度センサまでの距離を表す。
初めに、車体走行制御システム21は、次の数式4によって、車輪回転計41の測定値に基づく乗員重心位置での横方向加速度a(1)から、センサ取り付け位置での横方向加速度a〜(1)を算出する。
なお、下記数式4におけるhSAは、車体傾斜の回転中心から加速度センサまでの距離を表す。
(数式4)
a〜(1)=a(1)+(ΔV/D)2(YG−hSAsinθ1)
a〜(1)=a(1)+(ΔV/D)2(YG−hSAsinθ1)
そして、車体走行制御システム21は、Δa=a〜(1)−a〜(2)を求め、Δaの絶対値が所定の閾値ε以上である場合には、スリップが生じていると判断する。
なお、右駆動輪11aと左駆動輪11bのどちらがスリップしているかについては、次の数式5により判断できる。
なお、右駆動輪11aと左駆動輪11bのどちらがスリップしているかについては、次の数式5により判断できる。
(数式5)
a〜(1)−a〜(2)≧ε …右側の駆動輪11aがスリップ
a〜(1)−a〜(2)≦−ε …左側の駆動輪11bがスリップ
a〜(1)−a〜(2)≧ε …右側の駆動輪11aがスリップ
a〜(1)−a〜(2)≦−ε …左側の駆動輪11bがスリップ
横方向加速度決定システム22で横方向加速度aを求めた後、重心位置制御システム23は、搭乗物(乗員等)の着座位置、体重、体型を計測器を使って測定する(ステップ12)。
ついで重心位置制御システム23の重心位置推定システム25は、得られたデータから搭乗物の重心ズレ、高さを推定する(ステップ13:直接推定)。
まず重心位置推定システム25は、荷重計51から得られた搭乗部13上の荷重に基づき、搭乗物の質量を求める。
図6は、旋回走行時の乗員(搭乗物)およびシート(搭乗部13)の力学的状態を表したものである。
図6において、搭乗物質量をmH、シート質量をmS、搭乗部全質量をmc=mH+mS、重力加速度をgとするとき、搭乗部に作用する力の垂直方向成分(車体中心軸に平行な方向成分)の釣り合いは、次の数式6で表される。
まず重心位置推定システム25は、荷重計51から得られた搭乗部13上の荷重に基づき、搭乗物の質量を求める。
図6は、旋回走行時の乗員(搭乗物)およびシート(搭乗部13)の力学的状態を表したものである。
図6において、搭乗物質量をmH、シート質量をmS、搭乗部全質量をmc=mH+mS、重力加速度をgとするとき、搭乗部に作用する力の垂直方向成分(車体中心軸に平行な方向成分)の釣り合いは、次の数式6で表される。
(数式6)
Fn=ΣFn (k)=−mc(gcosθ1+asinθ1)
Fn=ΣFn (k)=−mc(gcosθ1+asinθ1)
数式6において、Fn (k)はN個の中のk番目の荷重計で計測された引張荷重を表し、全荷重計N個の計測値の総和をとることで、搭乗部に作用する垂直力Fnを求める。
また、θ1は走行、姿勢制御用センサ40で計測した横方向車体傾斜角、aは横方向加速度決定システム22で求めた横方向加速度であり、これらの値を使用することにより、旋回走行時や姿勢傾斜時にも搭乗物質量を求めることができる。
本実施形態では、重心位置推定システム25は、数式6を変形して得られる次の数式7から、搭乗物質量mHを求める。
(数式7)
mH=(Fn/(gcosθ1+a sinθ1))−mS
mH=(Fn/(gcosθ1+a sinθ1))−mS
この搭乗物質量mHの値は、全体の重心位置評価、搭乗物の種類判別、重心位置調整システムの目標位置(角度)設定に利用する。
次に、重心位置推定システム25は、座高計から得られた搭乗物の高さ(座高、荷物の高さ)と、数式7で算出した搭乗物質量mHに基づき、搭乗物の種類(人、荷物、無し)を判別し、その種類に適した方法で搭乗物重心高さhHを推定する。
図7は、搭乗物の種類の判別、及び、その種類に基づく重心高さhHの決定について説明したものである。
図7に示されるように、座高ζH、質量mH、比質量mH/ζHに対して、ある閾値を設定し、それに基づいて搭乗物の種類を判別する。なお、図7及び以下の判別式で用いる各閾値は一例であり、想定される使用環境に応じて修正する。
(a)mH<0.2kg、かつ、ζH<0.01mの場合、搭乗物は「無し」と判別する。
(b)mH>8kg、かつ、ζH>0.3m、かつ、mH/ζH>30kg/mの場合、搭乗物は「人」と判別する。
(c)その他の場合(上記(a)、(b)以外の場合)、搭乗物は「荷物」であると判別する。
図7に示されるように、座高ζH、質量mH、比質量mH/ζHに対して、ある閾値を設定し、それに基づいて搭乗物の種類を判別する。なお、図7及び以下の判別式で用いる各閾値は一例であり、想定される使用環境に応じて修正する。
(a)mH<0.2kg、かつ、ζH<0.01mの場合、搭乗物は「無し」と判別する。
(b)mH>8kg、かつ、ζH>0.3m、かつ、mH/ζH>30kg/mの場合、搭乗物は「人」と判別する。
(c)その他の場合(上記(a)、(b)以外の場合)、搭乗物は「荷物」であると判別する。
以上の判別条件において、人の判別条件(b)で体重に対する閾値が8kgと小さいのは、子供の乗車も想定しているためである。また、比質量(単位座高当たりの重さ;mH/ζH)を人の判別条件に加えることで、その判別の正確性を高めることができる。
なお、小さくて重い荷物(例えば、鉄塊)を乗せた場合も人と判定しないために、上限としてmH/ζH<p(例えば、80kg/m)を人の判別条件に加えてもよい。
また、各判別条件及び判別値は、一例であり、想定される使用条件に応じて適宜変更され、判別される。
なお、小さくて重い荷物(例えば、鉄塊)を乗せた場合も人と判定しないために、上限としてmH/ζH<p(例えば、80kg/m)を人の判別条件に加えてもよい。
また、各判別条件及び判別値は、一例であり、想定される使用条件に応じて適宜変更され、判別される。
以下、重心位置推定システム25は、判別した搭乗物の種類に応じて、搭乗物の重心高さ(座面部131からの高さ)hHを推定する。このように、搭乗物を判別し、その種類に応じて重心高さhHの推定方法(評価式)を変えることで、より正確な値を推定することができる。
(a)搭乗物を「無し」と判別した場合
hH=0
hH=0
(b)搭乗物を「荷物」と判別した場合、重心が幾何中心よりも下にずれていると仮定し、その下方向へのズレの程度を表す偏心度γを用いて、次の数式8から重心高さhHを求める。この偏心度γはあらかじめ設定した仮定値であり、本実施形態ではγ=0.4としている。
(数式8)
hH=((1−γ)/2)ζH
(数式8)
hH=((1−γ)/2)ζH
(c)搭乗物を「人」と判別した場合、標準的な人の体型を基準として、数式9から重心高さhHを求める。
数式9において、ζH,0、hH,0は座高と重心高さの標準値であり、本実施形態では、ζH,0=0.902m、hH,0=0.264mとする。
(数式9)
hH=(ζH/ζH,0)hH,0
数式9において、ζH,0、hH,0は座高と重心高さの標準値であり、本実施形態では、ζH,0=0.902m、hH,0=0.264mとする。
(数式9)
hH=(ζH/ζH,0)hH,0
なお、ここでは、図7に従って搭乗物の種類や重心高さを求める場合について説明したが、より複雑な条件や評価式(マップ)を用いて、搭乗物の種類や重心高さを求めるようにしてもよい。
次に、重心位置推定システム25は、荷重計51から得られた搭乗部13上の荷重分布、及び、これまでに取得した搭乗物情報である搭乗物質量mHと搭乗物重心高さhHに基づいて、搭乗物の横方向の重心ズレλHを求める。
図6において、搭乗部に作用する力の水平方向成分(車体対称面に垂直な方向成分)、および、基準軸(車体対称面と荷重計51の設置面との交線)まわりのモーメントの釣り合いは、次の数式10で表される。但し、車体傾斜運動(あるいは、搭乗部13の傾斜運動)の角速度による遠心力や角加速度による慣性力は無視している。
この数式10において、mc、λc、hc、ηc=hc+δSは、それぞれ、搭乗部全体の質量、重心ズレ(車体軸から重心までの距離)、重心高さ(座面部131の座面から重心までの距離)、荷重計基準重心高さ(荷重計51の設置面から重心までの距離)であり、数式11で表される。
また、数式10および数式11において、mH、λH、hH、ηH=hH+δSは、搭乗物の質量、重心ズレ、重心高さ、荷重計基準重心高さ、mS、λS、hS、ηS=hS+δSは、シートの質量、重心ズレ、重心高さ、荷重計基準重心高さ、δSは座面部131の厚さ(荷重計51の設置面から座面部131の座面までの距離)、gは重力加速度をそれぞれ表す。
図6において、搭乗部に作用する力の水平方向成分(車体対称面に垂直な方向成分)、および、基準軸(車体対称面と荷重計51の設置面との交線)まわりのモーメントの釣り合いは、次の数式10で表される。但し、車体傾斜運動(あるいは、搭乗部13の傾斜運動)の角速度による遠心力や角加速度による慣性力は無視している。
この数式10において、mc、λc、hc、ηc=hc+δSは、それぞれ、搭乗部全体の質量、重心ズレ(車体軸から重心までの距離)、重心高さ(座面部131の座面から重心までの距離)、荷重計基準重心高さ(荷重計51の設置面から重心までの距離)であり、数式11で表される。
また、数式10および数式11において、mH、λH、hH、ηH=hH+δSは、搭乗物の質量、重心ズレ、重心高さ、荷重計基準重心高さ、mS、λS、hS、ηS=hS+δSは、シートの質量、重心ズレ、重心高さ、荷重計基準重心高さ、δSは座面部131の厚さ(荷重計51の設置面から座面部131の座面までの距離)、gは重力加速度をそれぞれ表す。
(数式10)
Ft=ΣFt (k)=mc(gsinθ1−acosθ1)−mHλH(・・)+Fet
Ttn=Σ(Fn (k)Y(k))
=Fnλc−Ftηc+mHλH(・・)(ηH−ηc)−Fet(ηet−ηc)
Ft=ΣFt (k)=mc(gsinθ1−acosθ1)−mHλH(・・)+Fet
Ttn=Σ(Fn (k)Y(k))
=Fnλc−Ftηc+mHλH(・・)(ηH−ηc)−Fet(ηet−ηc)
(数式11)
mc=mH+mS
λc=(mHλH+mSλS)/mc
ηc=(mHηH+mSηS)/mc
mc=mH+mS
λc=(mHλH+mSλS)/mc
ηc=(mHηH+mSηS)/mc
数式10において、Fn (k)、Ft (k)はN個の中のk番目の荷重計で計測された引張荷重、横方向荷重(車体対称面に垂直な方向成分)であり、全荷重計N個で総和をとることで、搭乗部に作用する垂直力Fn、横力Ftを求める。また、Y(k)はk番目の荷重計の取り付け位置(車体対称面からの距離)であり、これとFn (k)との積の総和をとることで、搭乗部に作用するモーメントTtnを求める。
同数式10において、θ1は走行、姿勢制御用センサ40で計測した横方向車体傾斜角、aは横方向加速度決定システム22で求めた横方向加速度であり、これらの値を使用することにより、旋回走行時や姿勢傾斜時にも搭乗物の重心ズレや重心高さを求めることができる。
同数式10において、Fetは外力を表し、人が外から押す力や風による力に相当する。また、ηetは外力の作用点高さ(荷重計51の設置面からの高さ)である。これらの値は未知であり、搭乗物の重心ズレλHを合わせて、数式10の2つの式は3つの未知数を含む。
従って、外力Fetとその作用点高さηetの両者を正確に求めることはできないが、その一方の値を仮定すれば、もう一方の値を求めることができる。例えば、空力中心(空気抵抗の作用点)の想定位置を作用点高さηetとして仮定すれば、その空気抵抗の大きさFetを評価でき、その値を走行、姿勢制御に利用することもできる。
従って、外力Fetとその作用点高さηetの両者を正確に求めることはできないが、その一方の値を仮定すれば、もう一方の値を求めることができる。例えば、空力中心(空気抵抗の作用点)の想定位置を作用点高さηetとして仮定すれば、その空気抵抗の大きさFetを評価でき、その値を走行、姿勢制御に利用することもできる。
本実施形態では、外力の影響は小さいと仮定し、Fet=0とする。これにより、数式10の2つの式を、以下の数式12の形に変えることができる。この数式12は代数式であり、簡易で安定した搭乗物重心ズレλHの評価が可能である。
すなわち、重心位置推定システム25は、これまでに求めた搭乗物の重量mHと重心高さhHを用いて、数式12(および数式11)に基づき、搭乗物の重心ズレλHを求める。
すなわち、重心位置推定システム25は、これまでに求めた搭乗物の重量mHと重心高さhHを用いて、数式12(および数式11)に基づき、搭乗物の重心ズレλHを求める。
(数式12)
λH=(mcλc−mSλS)/mH
λc={Ftηc+FHa(ηH−ηc)+Ttn}/Fn
FHa=Ft−mc(gsinθ1−acosθ1)
λH=(mcλc−mSλS)/mH
λc={Ftηc+FHa(ηH−ηc)+Ttn}/Fn
FHa=Ft−mc(gsinθ1−acosθ1)
以上で説明した直接推定による搭乗物の重心ズレλHと高さhHの直接推定(ステップ12、13)と並行して、重心位置制御システム23は、外乱オブザーバ24で重心位置制御における外乱を推定し、その外乱推定値に基づいて搭乗物の重心ズレと高さを推定(間接推定)する(ステップ14、15)。
まず、外乱オブザーバ24は、重心位置修正制御の履歴から、その「外乱」を推定する(ステップ14)。
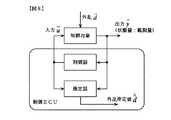
図8は、外乱オブザーバ24による外乱推定の方法を概念的に表したものである。
図8において、制御器は出力(状態量)y(→)を取得し、その値が目標値に近づくような入力u(→)を制御対象に与える。このとき、推定器は入力u(→)を取得し、制御対象のモデルに基づいて、その入力u(→)から推定される出力y(^→)を求める。それと同時に、推定器は実際の出力y(→)を取得し、その値と推定値y(^→)を比較する。そして、その差異の要因を「外乱」として推定し、その外乱推定値d(^→)から、制御対象の実物とモデルとの差異を推定する。
図8は、外乱オブザーバ24による外乱推定の方法を概念的に表したものである。
図8において、制御器は出力(状態量)y(→)を取得し、その値が目標値に近づくような入力u(→)を制御対象に与える。このとき、推定器は入力u(→)を取得し、制御対象のモデルに基づいて、その入力u(→)から推定される出力y(^→)を求める。それと同時に、推定器は実際の出力y(→)を取得し、その値と推定値y(^→)を比較する。そして、その差異の要因を「外乱」として推定し、その外乱推定値d(^→)から、制御対象の実物とモデルとの差異を推定する。
本実施形態の重心位置修正制御において、図8の制御器は重心位置制御システム23、推定器は外乱オブザーバ24、制御対象は重心位置調整機構である車体傾斜機構、ウェイト移動機構、シート(搭乗部13)移動機構、入力u(→)は各重心位置調整機構を作動させるアクチュエータの駆動トルク(力)指令値、出力y(→)は重心位置調整機構の状態量である車体傾斜角、ウェイト位置、シート位置をそれぞれ表す。
そして、搭乗物の質量と重心高さが、それぞれ想定値(ノミナル値)mH (n)、hH (n)であり、その重心が車体軸上にあり、車両が直進走行しているときの重心位置修正制御の対象をモデルとする。すなわち、搭乗物の重心ズレ、搭乗物の力学的パラメータ(質量、重心高さ、慣性モーメント)の想定値(ノミナル値)との差異、旋回走行に伴う遠心力の3つに起因する重心位置制御系への影響量を外乱d(→)とし、その推定値d(^→)に基づいて、搭乗物の質量、重心高さ、重心ズレの値を推定する。
そして、搭乗物の質量と重心高さが、それぞれ想定値(ノミナル値)mH (n)、hH (n)であり、その重心が車体軸上にあり、車両が直進走行しているときの重心位置修正制御の対象をモデルとする。すなわち、搭乗物の重心ズレ、搭乗物の力学的パラメータ(質量、重心高さ、慣性モーメント)の想定値(ノミナル値)との差異、旋回走行に伴う遠心力の3つに起因する重心位置制御系への影響量を外乱d(→)とし、その推定値d(^→)に基づいて、搭乗物の質量、重心高さ、重心ズレの値を推定する。
以下に、外乱推定値d(^→)を求めるのに必要な式の導出について説明する。
図9は、重心位置調整システムの力学モデルを示したものである。
この図9及び、これ以降の数式14、15、16で用いられる各記号は、次の通りである。
図9は、重心位置調整システムの力学モデルを示したものである。
この図9及び、これ以降の数式14、15、16で用いられる各記号は、次の通りである。
θ1;車体傾斜角
ξB;バランサ位置(車体中心からのズレ)
ξSL;搭乗部位置(車体中心からのズレ)
τ1;車体傾斜トルク(アクチュエータ出力)
SB;ウェイト駆動力(アクチュエータ出力)
SSL;搭乗部駆動力(アクチュエータ出力)
g;重力加速度
a;横方向加速度(実質重心位置での値)
m1;車体傾斜部総質量(可動部、乗員含む)
mB;ウェイト質量
mSL;搭乗部質量(乗員含む)
l1;車体傾斜部基本重心距離(回転中心からの距離)
lB;ウェイト基本重心距離(回転中心からの距離)
lSL;搭乗部基本重心距離(回転中心からの距離)
J1;車体傾斜部慣性モーメント(回転中心周りでの値、乗員含む)
D1;車体傾斜部の回転運動に対する粘性摩擦係数
DB;ウェイトの並進運動に対する粘性摩擦係数
DSL;搭乗部の並進運動に対する粘性摩擦係数
mH;搭乗物質量
λH;搭乗物重心ズレ
lH;搭乗物重心距離
JH;搭乗物慣性モーメント(回転中心周りでの値)
上付き文字(n)は、乗員に関するパラメータ値を想定値(ノミナル値)としたときの値を表す。
ξB;バランサ位置(車体中心からのズレ)
ξSL;搭乗部位置(車体中心からのズレ)
τ1;車体傾斜トルク(アクチュエータ出力)
SB;ウェイト駆動力(アクチュエータ出力)
SSL;搭乗部駆動力(アクチュエータ出力)
g;重力加速度
a;横方向加速度(実質重心位置での値)
m1;車体傾斜部総質量(可動部、乗員含む)
mB;ウェイト質量
mSL;搭乗部質量(乗員含む)
l1;車体傾斜部基本重心距離(回転中心からの距離)
lB;ウェイト基本重心距離(回転中心からの距離)
lSL;搭乗部基本重心距離(回転中心からの距離)
J1;車体傾斜部慣性モーメント(回転中心周りでの値、乗員含む)
D1;車体傾斜部の回転運動に対する粘性摩擦係数
DB;ウェイトの並進運動に対する粘性摩擦係数
DSL;搭乗部の並進運動に対する粘性摩擦係数
mH;搭乗物質量
λH;搭乗物重心ズレ
lH;搭乗物重心距離
JH;搭乗物慣性モーメント(回転中心周りでの値)
上付き文字(n)は、乗員に関するパラメータ値を想定値(ノミナル値)としたときの値を表す。
図9において、重心位置調整システムを表す力学モデルは、次の数式13のような線形2階微分方程式の形で表現される。
数式13において、xs(→)は基本状態、u(→)は入力、Puは入力作用経路であり、これらは数式14で表される。また、Ms、Cs、Ksは、系の力学的特性を意味するパラメータ行列であり、数式16で表される。なお、Iは単位行列を表す。

数式13において、xs(→)は基本状態、u(→)は入力、Puは入力作用経路であり、これらは数式14で表される。また、Ms、Cs、Ksは、系の力学的特性を意味するパラメータ行列であり、数式16で表される。なお、Iは単位行列を表す。
数式13において、d(→)は外乱を表し、旋回走行時の遠心力による外乱da(→)、搭乗物の重心ズレによる外乱dλ(→)、搭乗物の力学的パラメータの違いによる外乱dΔ(→)の3つの和として、次の数式16で表される。
また、Pdは外乱進入経路であり、次の数式17で表される。
また、Pdは外乱進入経路であり、次の数式17で表される。
(数式17)
Pd=I
Pd=I
次に、力学モデルである数式13を状態方程式の形で表すと、数式18のようになる。
数式18における状態変数ベクトルx(→)、及び各行列は、数式19に示す通りである。
数式18における状態変数ベクトルx(→)、及び各行列は、数式19に示す通りである。
そして、数式18の制御対象モデルにおける外乱d(→)に対して、その推定値d(^→)を求める外乱オブザーバは、次の数式20で表される。
数式20において、u(→)は入力、x(→)は状態量であり、上付き文字(k)はその離散データにおける時間ステップ、すなわち、時刻t=kΔt(Δtは離散時間刻み)での値を表す。
数式20において、u(→)は入力、x(→)は状態量であり、上付き文字(k)はその離散データにおける時間ステップ、すなわち、時刻t=kΔt(Δtは離散時間刻み)での値を表す。
外乱オブザーバ24は、以上で導出された数式20の外乱オブザーバによって、入力u(→)と状態量x(→)から、外乱推定値d(→)を求める。
数式20において、Lはオブザーバのフィードバックゲイン(行列)であり、推定値の収束時間と安定性を考慮して、例えば、極配置法によって、その値を決定する。一般に、推定時間(推定値の収束時間)を短くすると、その安定性は低下するため、推定にはある程度の時間が必要である。
数式20で表されるオブザーバは、最小次元オブザーバであり、状態量x(→)に観測値をそのまま用いることにより、少ない計算量(短い計算時間)で外乱を推定することが可能である。なお、計算量が多くても推定計算のロバスト性を優先させる場合には、状態量x(→)に対しても、その推定量を用いる完全次元オブザーバを適用してもよい。
また、本実施形態では、すべての状態量x(→)を出力y(→)として取得する場合、すなわちy(→)=x(→)を想定しているが、必要なセンサの数を減らすこと等を目的として、状態量の一部に推定値を用いてもよい。
また、本実施形態では、すべての状態量x(→)を出力y(→)として取得する場合、すなわちy(→)=x(→)を想定しているが、必要なセンサの数を減らすこと等を目的として、状態量の一部に推定値を用いてもよい。
以上により推定された外乱推定値d(∧→)は、外乱オブザーバ24から重心位置推定システム25に供給される。
重心位置推定システム25は、外乱推定値d(∧→)に基づき、搭乗物の質量及び重心位置(重心ズレと高さ)を推定する(ステップ15)。
重心位置推定システム25は、外乱推定値d(∧→)に基づき、搭乗物の質量及び重心位置(重心ズレと高さ)を推定する(ステップ15)。
上述の数式16を整理することにより、外乱d(→)は、数式21に示すように、外乱係数行列Λと状態量ベクトルη(→)の積で表すことができる。
まず、重心位置推定システム25は、外乱の詳細を表す数式21に基づいた最小自乗法を用いて、外乱係数行列Λを求める。
すなわち、参照時間Tref=(N−1)Δtにおける、外乱推定値d(k)(^→)と状態量ベクトルη(k)(→)の時間履歴(k=1〜N)によって、次の数式22から外乱係数行列Λを求める。
すなわち、参照時間Tref=(N−1)Δtにおける、外乱推定値d(k)(^→)と状態量ベクトルη(k)(→)の時間履歴(k=1〜N)によって、次の数式22から外乱係数行列Λを求める。
数式22において、状態量ベクトルη(→)の加速度(角加速度)θ1(・・),ξSL(・・)は、センサによって得られた位置(角度)、あるいは、速度(角速度)の差分をとることで得られる。
また、参照時間Trefについては、オブザーバの推定収束時間(推定時間)よりも長い時間を設定する必要がある。
なお、数式22において、η(→)の相関を無視する、すなわち、状態量ベクトルのテンソル積η(→)η(→)の非対角成分を零と近似することにより、計算を簡素化しても よい。
また、参照時間Trefについては、オブザーバの推定収束時間(推定時間)よりも長い時間を設定する必要がある。
なお、数式22において、η(→)の相関を無視する、すなわち、状態量ベクトルのテンソル積η(→)η(→)の非対角成分を零と近似することにより、計算を簡素化しても よい。
次に、重心位置推定システム25は、得られた外乱係数行列Λの各成分から、搭乗物の力学的パラメータの偏差(想定値との差)である搭乗物質量偏差Δ(mH)、搭乗物1次モーメント偏差Δ(mHlH)を求める。
数式21における外乱係数行列Λの表記で明らかなように、両搭乗物パラメータ偏差Δ(mH)、Δ(mHlH)は、外乱係数行列Λの複数の要素に対応しており、そのいずれからでも、パラメータ偏差の値を求めることができる。
このような冗長性に対して、本実施形態では、外乱係数行列Λの各要素に対して、それに対応する状態量の分散(値のばらつきの程度)を重みとして与えることで、パラメータ偏差のより正確な評価を実現する。これは、数式22の最小自乗法において、状態量ベクトルη(→)の要素の時間変動(値のばらつき)が大きいほど、より正確に外乱推定行列Λの要素の値を評価できることを考慮した結果である。
このような冗長性に対して、本実施形態では、外乱係数行列Λの各要素に対して、それに対応する状態量の分散(値のばらつきの程度)を重みとして与えることで、パラメータ偏差のより正確な評価を実現する。これは、数式22の最小自乗法において、状態量ベクトルη(→)の要素の時間変動(値のばらつき)が大きいほど、より正確に外乱推定行列Λの要素の値を評価できることを考慮した結果である。
すなわち、搭乗物質量偏差Δ(mH)、搭乗物1次モーメント偏差Δ(mHlH)は、数式23、24からそれぞれ求められる。
数式23、24において、Λijは外乱係数行列Λのi行j列要素を表し、それに基づく各評価値に対する重みW2、W3、W4、W5、W6は、数式25で表される。
なお、これらの数式において、m1は車体傾斜部の質量、l1は車体傾斜部の基本重心距離、mSLは搭乗部質量、gは重力加速度、aは車両の横方向加速度、θ1は車体傾斜角、ξSLは搭乗部位置であり、x(−)は参照時間Trefにおけるxの時間平均値を表す。
数式23、24において、Λijは外乱係数行列Λのi行j列要素を表し、それに基づく各評価値に対する重みW2、W3、W4、W5、W6は、数式25で表される。
なお、これらの数式において、m1は車体傾斜部の質量、l1は車体傾斜部の基本重心距離、mSLは搭乗部質量、gは重力加速度、aは車両の横方向加速度、θ1は車体傾斜角、ξSLは搭乗部位置であり、x(−)は参照時間Trefにおけるxの時間平均値を表す。
最後に、重心位置推定システム25は、求めた搭乗物質量偏差Δ(mH)と搭乗物一次モーメントΔ(mHlH)から、次の数式26に従って、搭乗物の質量mH、重心高さhH、重心ズレλHを求める。
なお、数式26において、gは重力加速度を表す。
なお、数式26において、gは重力加速度を表す。
以上のように、重心位置推定システム25において、直接推定(ステップ12、13)による搭乗物の質量と重心位置の推定値、及び間接推定(ステップ14、15)による同推定値を取得した後、重心位置制御システム23は、両推定値に基づいて、車両全体の質量と重心位置を決定する(ステップ16)。
まず、重心位置制御システム23は、搭乗物の質量mH、重心高さhH、重心ズレλHについて、計測器による直接推定値とオブザーバによる間接推定値から、次の(i)〜(iv)の手順により、制御に適用する各パラメータ値を決定する。このように、両推定法による推定値を使い分ける、あるいは、併用することで、より正確なパラメータ値の推定を実現している。
まず、重心位置制御システム23は、搭乗物の質量mH、重心高さhH、重心ズレλHについて、計測器による直接推定値とオブザーバによる間接推定値から、次の(i)〜(iv)の手順により、制御に適用する各パラメータ値を決定する。このように、両推定法による推定値を使い分ける、あるいは、併用することで、より正確なパラメータ値の推定を実現している。
(i)走行状態に応じた使い分け
外乱オブザーバ24は、状態量の変化がある程度大きく、また十分な観測時間がないと、パラメータ値を高精度で推定できない。そこで、制御開始時(制御開始からある設定時刻T1までの間)や、穏やかな走行時には、直接推定値をそのまま制御に適用するのと共に、その値を外乱オブザーバ24の初期値として与える。
外乱オブザーバ24は、状態量の変化がある程度大きく、また十分な観測時間がないと、パラメータ値を高精度で推定できない。そこで、制御開始時(制御開始からある設定時刻T1までの間)や、穏やかな走行時には、直接推定値をそのまま制御に適用するのと共に、その値を外乱オブザーバ24の初期値として与える。
なお、走行状態が「穏やか」であるか否かの判断については、例えば、次の数式27で表される不等式を満たしたときに、現在の走行状態が穏やかであると判断する。
数式27において、W0は予め設定した閾値であり、この値によって走行状態を判断する。また、aは横方向加速度、θ1は車体傾斜角、ξSLは搭乗部位置、gは重力加速度、l1は車体傾斜部基本重心距離(ノミナル値)であり、添字(k)は、時間ステップを表す。
数式27において、W0は予め設定した閾値であり、この値によって走行状態を判断する。また、aは横方向加速度、θ1は車体傾斜角、ξSLは搭乗部位置、gは重力加速度、l1は車体傾斜部基本重心距離(ノミナル値)であり、添字(k)は、時間ステップを表す。
(ii)フェイルセーフとしての併用
本実施形態では、直接推定および間接推定による両推定値について、一方の推定値を他方の推定システムのフェイル判定指標に用いる。
すなわち、重心位置制御システム23は、両推定値の値の差が大きい場合(所定値以上の場合)には、どちらか一方の推定値が異常であると判断する。そして、詳細な検討を行った後、異常である可能性が高い方の推定システムをフェイルとみなし、他方の推定値を採用する。
なお、このフェイルセーフ判定指標としての両推定値の使用については、他の(i)(iii)(iv)とは別に、常時使用してもよい。
本実施形態では、直接推定および間接推定による両推定値について、一方の推定値を他方の推定システムのフェイル判定指標に用いる。
すなわち、重心位置制御システム23は、両推定値の値の差が大きい場合(所定値以上の場合)には、どちらか一方の推定値が異常であると判断する。そして、詳細な検討を行った後、異常である可能性が高い方の推定システムをフェイルとみなし、他方の推定値を採用する。
なお、このフェイルセーフ判定指標としての両推定値の使用については、他の(i)(iii)(iv)とは別に、常時使用してもよい。
両推定値のどちらが異常であるかの判断については、例えば、次の数式28および数式29で表される条件のうちで、少なくとも一つを満足するとき、計測器による直接推定システムが異常であると判断する。
数式28は出力値の不自然な変化を検出する条件、数式29は未出力状態を検出する条件であり、両式中のp[1]は計測器によるパラメータ推定値(搭乗物の質量、重心高さ、重心ズレのいずれか)を表す。また、p[1]maxは判別条件の閾値であり、予め妥当な値を設定しておく。
数式28は出力値の不自然な変化を検出する条件、数式29は未出力状態を検出する条件であり、両式中のp[1]は計測器によるパラメータ推定値(搭乗物の質量、重心高さ、重心ズレのいずれか)を表す。また、p[1]maxは判別条件の閾値であり、予め妥当な値を設定しておく。
(iii)周波数成分に応じた使い分け
図10は、直接推定と間接推定による両推定値を共に使用する際の重み付けについて、その一例を示したものである。
直接推定(ステップ12、13)と間接推定(ステップ14、15)には、各々評価可能な上限の周波数が存在する。
すなわち、計測器による直接推定には、各センサの性能(固有振動数、応答性能)に基づく上限周波数f1が存在し、オブザーバによる間接推定には、フィードバックゲインによって決定される推定値収束速度(推定時間)に基づく上限周波数f2が存在する。
図10は、直接推定と間接推定による両推定値を共に使用する際の重み付けについて、その一例を示したものである。
直接推定(ステップ12、13)と間接推定(ステップ14、15)には、各々評価可能な上限の周波数が存在する。
すなわち、計測器による直接推定には、各センサの性能(固有振動数、応答性能)に基づく上限周波数f1が存在し、オブザーバによる間接推定には、フィードバックゲインによって決定される推定値収束速度(推定時間)に基づく上限周波数f2が存在する。
そこで、本実施形態では、図10(a)に示されるように、推定方法の上限周波数f1、f2を閾値とする3つの周波数帯域に両推定値を分割し、各々の周波数帯域で両推定値に対する重み付けを変える。
まず、直接推定における計測器測定限界f1以上の周波数成分については考慮しない。
次に、オブザーバの安定推定限界f2以上の周波数成分については、直接推定による推定値を採用する。そして、それ以下の周波数成分については、2つの推定値を考慮して、制御に使用するパラメータの値を決定する。
まず、直接推定における計測器測定限界f1以上の周波数成分については考慮しない。
次に、オブザーバの安定推定限界f2以上の周波数成分については、直接推定による推定値を採用する。そして、それ以下の周波数成分については、2つの推定値を考慮して、制御に使用するパラメータの値を決定する。
この周波数分割は、2つのローパスフィルタを使うことで実現できる。直接推定によるパラメータ推定値をp[1]、間接推定によるパラメータ推定値をp[2]とした場合、両推定値p[1]、p[2]に対し、直接推定値の高周波成分pHighは数式31によって、直接推定値及び間接推定値の低周波成分pLow[1]、pLow[2]は数式32によって、それぞれ抽出できる。
数式30及び31において、FLPF[x(k);fc]はローパスフィルタを表す関数であり、x(k)は被フィルタリング変数、fcはカットオフ周波数を表す。ローパスフィルタFLPFについては、例えば、次の数式32で表すような1次フィルタで実現できる。なお、数式32において、TSはサンプリング周期を表す。
(iv)信頼性に合わせた使い分け
推定したパラメータの種類(質量mH、重心ズレλH、重心高さhH)によって、直接推定値と間接推定値のどちらがより正確か、すなわち、その信頼度は異なる。
そこで、本実施形態では、各パラメータ推定値の低周波成分に対して、その信頼度に応じて予め設定された重みを与える。直接推定値に対する重みをω[1]、間接推定値に対する重みをω[2]とするとき、制御に適用するパラメータ値である搭乗物の質量mH、重心ズレλH、重心高さhHは、次の数式33から得られる。
推定したパラメータの種類(質量mH、重心ズレλH、重心高さhH)によって、直接推定値と間接推定値のどちらがより正確か、すなわち、その信頼度は異なる。
そこで、本実施形態では、各パラメータ推定値の低周波成分に対して、その信頼度に応じて予め設定された重みを与える。直接推定値に対する重みをω[1]、間接推定値に対する重みをω[2]とするとき、制御に適用するパラメータ値である搭乗物の質量mH、重心ズレλH、重心高さhHは、次の数式33から得られる。
図10(b)に例示した、両推定値に対する重みの設定値の例を以下に示す。この設定値は、計測器による直接推定において、質量mHの信頼度が高いこと、また、オブザーバによる間接推定において、重心高さhHの信頼度が高いことに基づく。
・搭乗部質量mH ;直接推定重みωm[1]=0.9、間接推定重みωm[2]=0.1
・搭乗部重心ズレλH;直接推定重みωλ[1]=0.5、間接推定重みωλ[2]=0.5
・搭乗部重心高さhH;直接推定重みωh[1]=0.3、間接推定重みωh[2]=0.7
・搭乗部重心ズレλH;直接推定重みωλ[1]=0.5、間接推定重みωλ[2]=0.5
・搭乗部重心高さhH;直接推定重みωh[1]=0.3、間接推定重みωh[2]=0.7
搭乗物の力学的パラメータである質量mH、重心ズレλH、重心高さhHを決定した後、重心位置制御システム23は、車体と搭乗物(乗員等)を合わせた車両の全体の重心位置を求める。
図11は、基本状態と調整状態における重心位置を表したものである。
最初に、重心位置制御システム23は、図11(a)に示すような、各重心位置調整機構を機能させていない状態、すなわち、車体を傾けていない、ウェイトや搭乗部が中心(基準位置)にある状態での車両の重心位置を求める。
なお、以降では、上記の状態を基本状態、この状態における車両の重心位置を基本重心位置と呼ぶ。
図11は、基本状態と調整状態における重心位置を表したものである。
最初に、重心位置制御システム23は、図11(a)に示すような、各重心位置調整機構を機能させていない状態、すなわち、車体を傾けていない、ウェイトや搭乗部が中心(基準位置)にある状態での車両の重心位置を求める。
なお、以降では、上記の状態を基本状態、この状態における車両の重心位置を基本重心位置と呼ぶ。
車両の質量m、および、基本重心位置である基本重心ズレλと基本重心距離lは、次の数式34から求められる。
数式34において、mH、λH、hH、lH=hH+l0は、搭乗物の質量、重心ズレ、重心高さ、重心距離をそれぞれ表す。l0は、車体傾斜の回転中心から座面部131の座面までの距離である。また、mCB、lCBは車体の質量、重心距離をそれぞれ表す。なお、車体の重心ズレはλCB=0とする。
数式34において、mH、λH、hH、lH=hH+l0は、搭乗物の質量、重心ズレ、重心高さ、重心距離をそれぞれ表す。l0は、車体傾斜の回転中心から座面部131の座面までの距離である。また、mCB、lCBは車体の質量、重心距離をそれぞれ表す。なお、車体の重心ズレはλCB=0とする。
(数式34)
m=mH+mCB
λ=mHλH/m
l=(mHlH+mCBlCB)/m
m=mH+mCB
λ=mHλH/m
l=(mHlH+mCBlCB)/m
次に、重心位置制御システム23は、図11(b)に示すような、各重心位置調整機構を動作させた状態、すなわち、車体が傾斜し、ウェイトや搭乗部が中心(基準位置)から動いている状態での車両の重心位置を求める。
なお、以降では、上記の状態を調整状態、この状態における車両の重心位置を実質重心位置と呼ぶ。
なお、以降では、上記の状態を調整状態、この状態における車両の重心位置を実質重心位置と呼ぶ。
車体傾斜の回転中心を基準点とするとき、その基準点からの車軸方向へのズレYG、および、鉛直方向へのズレZGは、全質量m、基本重心ズレλ、基本重心距離lに基づき、次の数式35から得られる。
数式35において、θ1は車体傾斜角、mSLは搭乗部移動機構によって移動する質量、ξSLは搭乗部位置、mBはウェイト移動機構によって移動する質量、ξBはウェイト位置を表す。
数式35において、θ1は車体傾斜角、mSLは搭乗部移動機構によって移動する質量、ξSLは搭乗部位置、mBはウェイト移動機構によって移動する質量、ξBはウェイト位置を表す。
(数式35)
YG=lsinθ1+λ0cosθ1
ZG=lcosθ1−λ0sinθ1
λ0=λ+(mSLξSL+mBξB)/m
YG=lsinθ1+λ0cosθ1
ZG=lcosθ1−λ0sinθ1
λ0=λ+(mSLξSL+mBξB)/m
各推定値に基づいて、車両の重心位置を決定した後、重心位置制御システム23は、その重心位置と横方向加速度から重心位置修正量を設定する(ステップ17)。
図12は、横方向加速度と基本重心位置から決まる基本接地荷重中心点S、基本接地荷重中心位置λGF、及び基本接地荷重偏心度βについて表したものである。
図12は、横方向加速度と基本重心位置から決まる基本接地荷重中心点S、基本接地荷重中心位置λGF、及び基本接地荷重偏心度βについて表したものである。
図12に示されるように、基本接地荷重中心点Sは、遠心力と重力の合力ベクトルFと平行で重心を通る直線と地面との交点であり、車体中心軸に対する点Sの相対位置(ズレ)を基本接地荷重中心位置λGFとする。
また、λGFを半トレッドD/2で無次元化した値が、基本接地荷重偏心度βであり、−1<β<1ならば、基本接地荷重中心点は両駆動輪11の間に存在する。
また、λGFを半トレッドD/2で無次元化した値が、基本接地荷重偏心度βであり、−1<β<1ならば、基本接地荷重中心点は両駆動輪11の間に存在する。
このように、各重心位置調整機構を動作させていない基本状態での安定性を知ることにより、重心位置の調整が必要か否かを容易に判断することができ、不必要な重心位置調整や重心位置調整機構の相殺動作(複数の機構が互いにその効果を打ち消しあうように動作すること)を避けられる。
基本接地荷重偏心度β、および、基本接地荷重中心位置λGF、基本重心位置での横方向加速度aBCは、次の数式36から求められる。
数式36において、RWはタイヤ接地半径、Dはトレッド(両駆動輪11a、11b間の距離)、YGは実質重心ズレ、λは基本重心ズレ、lは基本重心距離、θ1は車体傾斜角、ΔVは車輪回転周速度差、gは重力加速度である。
数式36において、RWはタイヤ接地半径、Dはトレッド(両駆動輪11a、11b間の距離)、YGは実質重心ズレ、λは基本重心ズレ、lは基本重心距離、θ1は車体傾斜角、ΔVは車輪回転周速度差、gは重力加速度である。
(数式36)
β=λGF/(D/2)
λGF=λ−(aBC/g)(l+RW)
aBC=a+(ΔV/D)2(YG−λ+RWsinθ1)
β=λGF/(D/2)
λGF=λ−(aBC/g)(l+RW)
aBC=a+(ΔV/D)2(YG−λ+RWsinθ1)
なお、数式36では、基本状態と実質状態の重心位置の違いによる加速度値の変化を考慮しているが、加速度計の計測値を使用している場合(スリップしている場合)には、加速度の補正は行なわず、aBC=aとする。
この数式36から得られた基本接地荷重偏心度βの値により、基本状態における車両の安定度を次のように判定することができる。
(a)β=0…中立状態;最も安定な状態
(b)|β|>1…車体横転;基本接地荷重点のずれている方向に車体が横転する
(c)|β|>βslip…片輪スリップ;基本接地荷重点から遠い側の駆動輪がスリップする(結果的に車両がスピンし、横転する可能性が高い)
(a)β=0…中立状態;最も安定な状態
(b)|β|>1…車体横転;基本接地荷重点のずれている方向に車体が横転する
(c)|β|>βslip…片輪スリップ;基本接地荷重点から遠い側の駆動輪がスリップする(結果的に車両がスピンし、横転する可能性が高い)
片輪スリップの条件(c)における閾値βslipは、次の数式37から得られる。
数式37において、aBCは基本重心位置での横方向加速度、gは重力加速度、λGFはタイヤ接地半径、mは車両の質量である。また、τw*は基本接地荷重中心点から遠い側の駆動輪の駆動トルクを表す。
数式37において、aBCは基本重心位置での横方向加速度、gは重力加速度、λGFはタイヤ接地半径、mは車両の質量である。また、τw*は基本接地荷重中心点から遠い側の駆動輪の駆動トルクを表す。
数式37において、μはタイヤ路面間の摩擦係数である。本実施形態では、予め設定した想定値を与えるが、計測器による測定値やオブザーバなどによる推定値を用いてもよい。
数式37から明らかなように、βslipは1よりも小さい。すなわち、駆動トルクを与えている場合には、車両が横転する前に片輪がスリップする。そこで、本実施形態では、このスリップ限界βslipを安定限界とする。
次に、重心位置制御システム23は、求めた基本接地荷重偏心度βに基づいて、接地荷重偏心度修正量Δβ*を決定する。
図13は、基本接地荷重偏心度βに対する、接地荷重偏心度目標値β*と接地荷重偏心度修正量Δβ*を表したものである。
重心位置制御システム23は、接地荷重偏心度修正量Δβ*を、例えば、図13(b)、(c)、あるいは、次の数式38から求める。
重心位置制御システム23は、接地荷重偏心度修正量Δβ*を、例えば、図13(b)、(c)、あるいは、次の数式38から求める。
数式38において、βsafeは偏心度制限値であり、基本接地荷重偏心度βがこの値を超えない限り、重心位置の調整を行わない。これにより、微小な接地荷重点の移動に対して、不必要なエネルギー消費を無くすのと共に、搭乗部13及び搭乗物の揺動を抑えることができる。
この偏心度制限値βsafeは、例えば、次の数式39によって設定する。
(数式39)
βsafe=βslip/Csafe
βsafe=βslip/Csafe
数式39において、Csafeは安全係数であり、この値を1よりも大きくする、すなわち、βsafeをβslipよりも低く設定することにより、重心位置や横方向加速度の測定、推定における誤差や、各重心位置調整機構では対応できない高周波の変動に対する安全性を確保する。本実施形態では、この値をCsafe=1.5とする。
なお、安全領域|β*|<βsafeの範囲内であれば、数式38の代わりに、他の修正値決定方法を使用してもよい。例えば、最も安全な条件である完全対応型として、Δβ*=−β(β*=0)としてもよい。
次に、重心位置制御システム23は、算出した接地荷重偏心度修正量Δβ*を重心位置調整機構に振り分ける(ステップ18)。
本実施形態では、重心位置を調整する機構として、車体傾斜機構、ウェイト移動機構、搭乗部移動機構を備えており、各機構は以下のような特徴を持つ。
車体傾斜機構は、その対象となる慣性が大きいことから、低周波域の遅くて大きい変動に対して効果的であり、車体と共に搭乗部および乗員(搭乗部)を傾けることができる。この効果は、乗員が体感する横方向加速度の調整に利用できる。
ウェイト移動機構は、ウェイトの質量が車両に比べて小さいことから、高周波域の速くて小さい変動に対して効果的である。
搭乗部移動機構は、車体傾斜機構と同様に、低周波域の遅くて大きい変動に対して効果的であるが、搭乗部および搭乗物は傾かない。これにより、乗員の姿勢を変えることなく、重心位置を調整できる。
以上のような特徴を考慮して、接地荷重偏心度修正量Δβ*を振り分ける。
車体傾斜機構は、その対象となる慣性が大きいことから、低周波域の遅くて大きい変動に対して効果的であり、車体と共に搭乗部および乗員(搭乗部)を傾けることができる。この効果は、乗員が体感する横方向加速度の調整に利用できる。
ウェイト移動機構は、ウェイトの質量が車両に比べて小さいことから、高周波域の速くて小さい変動に対して効果的である。
搭乗部移動機構は、車体傾斜機構と同様に、低周波域の遅くて大きい変動に対して効果的であるが、搭乗部および搭乗物は傾かない。これにより、乗員の姿勢を変えることなく、重心位置を調整できる。
以上のような特徴を考慮して、接地荷重偏心度修正量Δβ*を振り分ける。
初めに、重心位置制御システム23は、接地荷重偏心度修正量Δβ*から、センサのデータが含むノイズ成分や車体運動への影響が小さい超高周波成分を除去する。
すなわち、次の数式40で表されるように、接地荷重偏心度修正量Δβ*に対してローパスフィルタをかけることにより、その超高周波成分を取り除き、実際に重心位置調整機構で対応する実質接地荷重偏心度修正量Δβ0 *を求める。
なお、ローパスフィルタFLPFとしては、例えば、前述の数式32で示した一次フィルタを使用し、そのカットオフ周波数f0は、センサのサンプリング周期や車両運動制御の固有周波数に基づいて、あらかじめ設定しておく。
すなわち、次の数式40で表されるように、接地荷重偏心度修正量Δβ*に対してローパスフィルタをかけることにより、その超高周波成分を取り除き、実際に重心位置調整機構で対応する実質接地荷重偏心度修正量Δβ0 *を求める。
なお、ローパスフィルタFLPFとしては、例えば、前述の数式32で示した一次フィルタを使用し、そのカットオフ周波数f0は、センサのサンプリング周期や車両運動制御の固有周波数に基づいて、あらかじめ設定しておく。
次に、重心位置制御システム23は、求めた実質接地荷重偏心度修正量Δβ* 0の中で、ウェイト移動機構に割り当てる高周波成分Δβ* Bを抽出する。
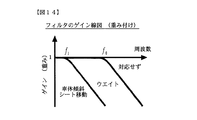
図14は、フィルタのゲイン線図(重み付け)を表したものである。
図14あるいは次の数式41に示すように、実質接地荷重偏心度修正量Δβ* 0をローパスフィルタFLPFによって、低周波成分Δβ* Lowと高周波成分Δβ* Highに分割する。なお、フィルタのカットオフ周波数f1は、車体傾斜および搭乗部移動制御の対応限界速度(固有周波数)に基づいて、あらかじめ設定しておく。
図14は、フィルタのゲイン線図(重み付け)を表したものである。
図14あるいは次の数式41に示すように、実質接地荷重偏心度修正量Δβ* 0をローパスフィルタFLPFによって、低周波成分Δβ* Lowと高周波成分Δβ* Highに分割する。なお、フィルタのカットオフ周波数f1は、車体傾斜および搭乗部移動制御の対応限界速度(固有周波数)に基づいて、あらかじめ設定しておく。
そして、数式41に示すように、得られた実質接地荷重偏心度修正量の高周波成分Δβ* Highは、全てウェイト移動機構の負担分Δβ* Bとする。
次に、重心位置制御システム23は、旋回走行時に乗員が体感する(搭乗物に作用する)横方向加速度を考慮して、残った実質接地荷重偏心度修正量の低周波成分Δβ* Lowを車体傾斜機構と搭乗部移動機構へ分配する。
まず、重心位置制御システム23は、車両の横方向加速度aに基づいて、平衡傾斜角φeqを求める。
図15(a)で示されるように、平衡傾斜角φeqは、遠心力と重力の合力ベクトルFと鉛直軸のなす角度を表す。この角度は、乗員(搭乗物)に作用する力の向きに等しく、乗員(搭乗物)に作用する遠心力の増加と共に大きくなる。
図15(a)で示されるように、平衡傾斜角φeqは、遠心力と重力の合力ベクトルFと鉛直軸のなす角度を表す。この角度は、乗員(搭乗物)に作用する力の向きに等しく、乗員(搭乗物)に作用する遠心力の増加と共に大きくなる。
この平衡傾斜角φeqは、次の数式42で求められる。
数式42において、aは横方向加速度、gは重力加速度、ΔVは左右輪回転周速度差、Dはトレッド、YGは車両の実質重心ズレ、λHは乗員(搭乗物)の基本重心ズレ、lHは乗員(搭乗物)の基本重心距離、θ1は車体傾斜角、ξSLは搭乗部の位置を表す。
なお、aHは乗員(搭乗物)の重心位置における横方向加速度を表すが、加速度計の計測値をそのまま使用している場合(スリップしている場合)には、加速度の補正は行わず、aH=aとする。
数式42において、aは横方向加速度、gは重力加速度、ΔVは左右輪回転周速度差、Dはトレッド、YGは車両の実質重心ズレ、λHは乗員(搭乗物)の基本重心ズレ、lHは乗員(搭乗物)の基本重心距離、θ1は車体傾斜角、ξSLは搭乗部の位置を表す。
なお、aHは乗員(搭乗物)の重心位置における横方向加速度を表すが、加速度計の計測値をそのまま使用している場合(スリップしている場合)には、加速度の補正は行わず、aH=aとする。
(数式42)
φeq=tan-1(aH/g)
aH=a−(ΔV/D)2(YGH−YG)
YGH=lHsinθ1+(λH+ξSL)cosθ1
φeq=tan-1(aH/g)
aH=a−(ΔV/D)2(YGH−YG)
YGH=lHsinθ1+(λH+ξSL)cosθ1
ちなみに、乗員が体感する加速度の横方向成分(車体対称面に垂直な方向成分)aHtは、次の数式43で表される。
この数式43から明らかなように、車体を平衡傾斜角まで傾けると、すなわち、θ1=φeqとすると、乗員は横方向の力を感じなくなる。
この数式43から明らかなように、車体を平衡傾斜角まで傾けると、すなわち、θ1=φeqとすると、乗員は横方向の力を感じなくなる。
(数式43)
aHt=(√(a2+g2))sin(φeq−θ1)
aHt=(√(a2+g2))sin(φeq−θ1)
次に、重心位置制御システム23は、算出した平衡傾斜角φeqに基づき、車体傾斜角の目標値θ1 *を決定する。
数式43において、乗員が体感する(搭乗物に作用する)横方向加速度aHtは、乗員(搭乗物)に作用する遠心力の大きさに相当する平衡傾斜角φeq(および、車両の横方向加速度a)と、乗員(搭乗物)の傾きに等しい車体傾斜角θ1によって決まる。
従って、車体傾斜角θ1を操作することにより、任意の乗員体感横方向加速度aHtを実現できる。
数式43において、乗員が体感する(搭乗物に作用する)横方向加速度aHtは、乗員(搭乗物)に作用する遠心力の大きさに相当する平衡傾斜角φeq(および、車両の横方向加速度a)と、乗員(搭乗物)の傾きに等しい車体傾斜角θ1によって決まる。
従って、車体傾斜角θ1を操作することにより、任意の乗員体感横方向加速度aHtを実現できる。
本実施形態では、図15(b)、あるいは、次の数式44によって、車体傾斜角の目標値θ1 *を決定する。
これにより、大きな遠心力による乗員への負荷の軽減と、遠心力の一部を体感することによる乗員の旋回状態の認識との両立が実現できる。
これにより、大きな遠心力による乗員への負荷の軽減と、遠心力の一部を体感することによる乗員の旋回状態の認識との両立が実現できる。
数式44において、CSA、φ0はパラメータであり、予め設定した値を用いる。
CSAは加速度変化感知係数であり、横方向加速度の増減に対する体感加速度の増減の比を表す。
また、φ0は不感帯上限値であり、この値を平衡傾斜角φeqに対する閾値として用いることにより、以下に示すような、平衡傾斜角φeq(横方向加速度a)の大小による車体傾斜角目標値θ1 *の決定手法の切り替えを実現している。
CSAは加速度変化感知係数であり、横方向加速度の増減に対する体感加速度の増減の比を表す。
また、φ0は不感帯上限値であり、この値を平衡傾斜角φeqに対する閾値として用いることにより、以下に示すような、平衡傾斜角φeq(横方向加速度a)の大小による車体傾斜角目標値θ1 *の決定手法の切り替えを実現している。
(a)平衡傾斜角φeqが小さい、すなわち、遠心力が小さい場合(│φeq│<│φ0│)には、車体を傾けない(目標傾斜角をθ1 *=0とする)。
これにより、乗員の姿勢や視界の細かい揺動を防ぐことが可能になる。
また、車体(搭乗部13)の傾斜に必要なエネルギーを節約することができる。特に滑りネジ型のアクチュエータを使用して車体(搭乗部13)を傾斜させる場合に有効である。
これにより、乗員の姿勢や視界の細かい揺動を防ぐことが可能になる。
また、車体(搭乗部13)の傾斜に必要なエネルギーを節約することができる。特に滑りネジ型のアクチュエータを使用して車体(搭乗部13)を傾斜させる場合に有効である。
(b)平衡傾斜角φeqが大きい、すなわち、遠心力が大きい場合(│φeq│>│φ0│)は、車体をある程度傾ける。
これにより、遠心力に伴う乗員身体への負荷、及び車体の横転や自身の落下などの乗員の精神的不安を軽減することができる。
また、車体を平衡傾斜角まで傾けないことにより(|θ1 *|<|φeq|)、乗員は車両が旋回状態にあることを体感できる。
さらに、平衡傾斜角(遠心力)の増加に従って、車体傾斜角目標値θ1 *と平衡傾斜角φeqの差を大きくすること、すなわち、図15(b)における直線θ1 *=φeq(完全平衡)の傾きよりも小さな傾きとすることにより(CSA>0)、乗員に横方向加速度の増減を体感させることができる。
これにより、遠心力に伴う乗員身体への負荷、及び車体の横転や自身の落下などの乗員の精神的不安を軽減することができる。
また、車体を平衡傾斜角まで傾けないことにより(|θ1 *|<|φeq|)、乗員は車両が旋回状態にあることを体感できる。
さらに、平衡傾斜角(遠心力)の増加に従って、車体傾斜角目標値θ1 *と平衡傾斜角φeqの差を大きくすること、すなわち、図15(b)における直線θ1 *=φeq(完全平衡)の傾きよりも小さな傾きとすることにより(CSA>0)、乗員に横方向加速度の増減を体感させることができる。
なお、数式44、あるいは、図15(b)で示される車体傾斜角目標設定関数は、本実施形態で使用する場合の例示であり、他の関数を用いてもよい。例えば、θ1 *=φeq(完全平衡)とすれば、乗員に全く遠心力を負担させることなく走行することが可能となる。
また、その関数を、平衡傾斜角φeqから車体傾斜角目標値θ1 *への変換テーブルとして記憶しておき、該変換テーブルに従って車体傾斜角目標値θ1 *を決定するようにしてもよい。
また、その関数を、平衡傾斜角φeqから車体傾斜角目標値θ1 *への変換テーブルとして記憶しておき、該変換テーブルに従って車体傾斜角目標値θ1 *を決定するようにしてもよい。
さらに、乗員の好みや搭乗物の種類に応じて、車体傾斜角目標設定関数を切り替えてもよい。
乗員の好みに応じて切り替える場合、例えば、操縦装置30にパラメータ変更入力装置を設置し、それを乗員が操作することにより、車体傾斜角目標設定関数のパラメータを、連続的あるいは離散的に変えられるようにしてもよい。
搭乗物の種類に応じて切り替える場合、例えば、ステップ13(図7)における搭乗物種類の推定結果に基づき、以下のように切り替えてもよい。
(a)搭乗物が「人」ならば、数式44、あるいは、図15(b)に示す関数を用いる。
(b)搭乗物が「荷物」ならば、常に車体を平衡傾斜角φeqまで傾け、荷物の転倒や落下を防ぐ。
(c)搭乗物が「無」ければ、常に車体を傾けずに、エネルギーの浪費を防ぐ。
乗員の好みに応じて切り替える場合、例えば、操縦装置30にパラメータ変更入力装置を設置し、それを乗員が操作することにより、車体傾斜角目標設定関数のパラメータを、連続的あるいは離散的に変えられるようにしてもよい。
搭乗物の種類に応じて切り替える場合、例えば、ステップ13(図7)における搭乗物種類の推定結果に基づき、以下のように切り替えてもよい。
(a)搭乗物が「人」ならば、数式44、あるいは、図15(b)に示す関数を用いる。
(b)搭乗物が「荷物」ならば、常に車体を平衡傾斜角φeqまで傾け、荷物の転倒や落下を防ぐ。
(c)搭乗物が「無」ければ、常に車体を傾けずに、エネルギーの浪費を防ぐ。
次に、重心位置制御システム23は、決定した車体傾斜角の目標値θ1 *に基づいて、実質接地荷重偏心度修正量の低周波成分ΔβLow *を、車体傾斜機構と搭乗部移動機構へ分配する。
実質接地荷重偏心度修正量の車体傾斜機構負担分ΔβCL *は数式45により、搭乗部移動機構負担分ΔβSL *は数式46により、それぞれ決定される。
これにより、接地荷重偏心度修正量ΔβLow *で達成される車体横転に対する安全性確保と、車体傾斜角目標値θ1 *で達成される乗員の乗り心地の確保を両立させることができる。
数式45及び46において、aは車両の横方向加速度、gは重力加速度、Dはトレッド、RWはタイヤ接地半径、lは車両の基本重心距離、λは車両の基本重心ズレを表す。
これにより、接地荷重偏心度修正量ΔβLow *で達成される車体横転に対する安全性確保と、車体傾斜角目標値θ1 *で達成される乗員の乗り心地の確保を両立させることができる。
数式45及び46において、aは車両の横方向加速度、gは重力加速度、Dはトレッド、RWはタイヤ接地半径、lは車両の基本重心距離、λは車両の基本重心ズレを表す。
(数式46)
ΔβSL *=ΔβLow *−ΔβCL *
ΔβSL *=ΔβLow *−ΔβCL *
最後に、重心位置制御システム23は、実質接地荷重偏心度修正量の車体傾斜機構負担分ΔβCL *と搭乗部移動機構負担分ΔβSL *に対して、相殺動作の防止処理を行う。
これにより、両機構の不必要な相殺動作(互いに効果を打ち消しあう動作)、特に、接地荷重中心点を最安定位置から遠ざけるように搭乗部を動かすことを防ぐことができる。
これにより、両機構の不必要な相殺動作(互いに効果を打ち消しあう動作)、特に、接地荷重中心点を最安定位置から遠ざけるように搭乗部を動かすことを防ぐことができる。
図16は、低周波重心位置調整機構による協力動作と相殺動作について表したものである。
このような各条件に対して、不必要な動作を行っている場合のみ、各機構負担分の設定値ΔβCL *、ΔβSL *を修正する。
このような各条件に対して、不必要な動作を行っている場合のみ、各機構負担分の設定値ΔβCL *、ΔβSL *を修正する。
(a)βCL *・ΔβSL *>0の場合、両機構は共に同じ方向に重心(接地荷重中心点)を動かすように動作する(協力動作)。この場合には、両機構の負担分ΔβCL *、ΔβSL *共に修正の必要はない。
(b)βCL *・ΔβSL *<0の場合、両機構は互いに逆の方向に重心(接地荷重中心点)を動かすように動作する(相殺動作)。この条件は、さらに以下の2つの条件に分けて扱う。
(b1)βLow *・ΔβCL *>0の場合、車体傾斜機構は、系全体が目標とする重心移動の方向と同じ方向に動作するが、搭乗部移動機構は、その逆に動作する。この動作は無意味であるため、搭乗部移動機構の負担分をΔβSL *=0と修正し、搭乗部の逆動作を防ぐ。なお、車体傾斜機構の負担分ΔβCL *については、修正する必要はない。
(b2)βLow *・ΔβCL *<0の場合、車体傾斜機構は、系全体が目標とする重心移動の方向と逆の方向に動作する。この動作は、重心移動に対しては無駄であるが、乗員の乗り心地に対しては有効である。従って、この場合には、両機構の負担分ΔβCL *、ΔβSL *共に修正しない。なお、乗員の乗り心地の向上よりも、各機構の動作に伴うエネルギー消費の低減を優先させる場合には、車体を傾けない、すなわち、ΔβCL *=0と修正してもよい。
(b)βCL *・ΔβSL *<0の場合、両機構は互いに逆の方向に重心(接地荷重中心点)を動かすように動作する(相殺動作)。この条件は、さらに以下の2つの条件に分けて扱う。
(b1)βLow *・ΔβCL *>0の場合、車体傾斜機構は、系全体が目標とする重心移動の方向と同じ方向に動作するが、搭乗部移動機構は、その逆に動作する。この動作は無意味であるため、搭乗部移動機構の負担分をΔβSL *=0と修正し、搭乗部の逆動作を防ぐ。なお、車体傾斜機構の負担分ΔβCL *については、修正する必要はない。
(b2)βLow *・ΔβCL *<0の場合、車体傾斜機構は、系全体が目標とする重心移動の方向と逆の方向に動作する。この動作は、重心移動に対しては無駄であるが、乗員の乗り心地に対しては有効である。従って、この場合には、両機構の負担分ΔβCL *、ΔβSL *共に修正しない。なお、乗員の乗り心地の向上よりも、各機構の動作に伴うエネルギー消費の低減を優先させる場合には、車体を傾けない、すなわち、ΔβCL *=0と修正してもよい。
車体傾斜機構、ウェイト移動機構、搭乗部移動機構の各機構に対する実質接地荷重偏心度修正量の負担分を決定した後、重心位置制御システム23は、その負担分に応じて各機構を動かし、重心位置を移動させることでその負担分を実行する(ステップ19〜ステップ21)。
重心位置制御システム23は、車体傾斜機構を使って、車体を目標傾斜角θ1 *に傾けることにより、重心位置を調整する(ステップ19)。
車体傾斜角目標値θ1 *は、ステップ18で車体傾斜機構に分配された実質接地荷重偏心度修正量の負担分ΔβCL *に基づき、次の数式47によって決定される。
数式47において、aは横方向加速度、gは重力加速度、RWはタイヤ接地半径、Dはトレッド、lは車両の基本重心距離、λは車両の基本重心ズレである。
車体傾斜角目標値θ1 *は、ステップ18で車体傾斜機構に分配された実質接地荷重偏心度修正量の負担分ΔβCL *に基づき、次の数式47によって決定される。
数式47において、aは横方向加速度、gは重力加速度、RWはタイヤ接地半径、Dはトレッド、lは車両の基本重心距離、λは車両の基本重心ズレである。
なお、車体傾斜角目標値θ1 *については、ステップ18の数式44で一度求めており、その後でΔβCL *に対する修正が無ければ、前に求めた値をそのまま用いてもよい。
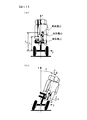
図17は、車体を目標角θ1 *に傾斜させる車体傾斜機構について、その構成例を表したものである。
この車体傾斜機構は、搭乗部傾斜手段として機能し、搭乗部13を含む車体の一部を横方向に傾けることによって、車両の重心を移動させる。この機構は、可動部の質量(慣性)が大きいため、重心をゆっくり大きく移動させるのに適する。また、車体と共に搭乗部および乗員も傾くことを利用して、乗員の感じる遠心力の程度を調整することも可能である。
この車体傾斜機構は、搭乗部傾斜手段として機能し、搭乗部13を含む車体の一部を横方向に傾けることによって、車両の重心を移動させる。この機構は、可動部の質量(慣性)が大きいため、重心をゆっくり大きく移動させるのに適する。また、車体と共に搭乗部および乗員も傾くことを利用して、乗員の感じる遠心力の程度を調整することも可能である。
図17(a)の車体傾斜機構は、駆動輪11a、11bに配置されたリンク機構70を備えている。
リンク機構70は、上部リンク71、下部リンク72を備え、両リンク71、72の両端は、それぞれ駆動輪11a、11bの支持軸80a〜80dによって軸支されている。
なお、駆動モータ12a、12bには、支持軸80a〜80dを支持するための支持部材が溶接などにより取り付けられている。
このようにリンク機構70では、上部リンク71、下部リンク72をそれぞれ上辺、下辺とし、駆動モータ12a、駆動モータ12bを左右の辺とする4節のリンク機構が平行四辺形として構成される。
リンク機構70は、上部リンク71、下部リンク72を備え、両リンク71、72の両端は、それぞれ駆動輪11a、11bの支持軸80a〜80dによって軸支されている。
なお、駆動モータ12a、12bには、支持軸80a〜80dを支持するための支持部材が溶接などにより取り付けられている。
このようにリンク機構70では、上部リンク71、下部リンク72をそれぞれ上辺、下辺とし、駆動モータ12a、駆動モータ12bを左右の辺とする4節のリンク機構が平行四辺形として構成される。
上部リンク71の中央には、支持軸80eが設けられ、下部リンク72の中央には傾斜用モータ(車体傾斜アクチュエータ)62のステータ63が配設されている。
そして搭乗部13が上部に配設された連結リンク75の下側端部には、傾斜用モータ62のロータ64が固定され、この連結リンク75の途中に上部リンク71の支持軸80eが固定されている。
そして搭乗部13が上部に配設された連結リンク75の下側端部には、傾斜用モータ62のロータ64が固定され、この連結リンク75の途中に上部リンク71の支持軸80eが固定されている。
このように構成されたリンク機構70において、傾斜用モータ62を駆動すると、リンク機構70の平行四辺形が変形し、連結リンク75の傾斜に伴って搭乗部13が傾斜するようになっている。
図17(b)に示した車体傾斜機構は、スライダ機構90により搭乗部13を傾斜させる機構である。この機構では、搭乗部13の傾斜に関わらず、駆動輪11a、11bは傾斜しない機構となっている。
両駆動輪11a、11bには、固定軸91および、スライダ軸92が固定されており、搭乗部13が上端部に配設された搭乗部支持軸95の下側端部が固定軸91の中央の支持軸80hに軸支されている。
スライダ軸92には、該スライダ軸92に沿って水平方向に往復動可能なスライダ93が配置されており、スライダ93と搭乗部支持軸95とが、連結軸94によって連結されている。
このスライダ93の移動により、支持軸80hを支点として、搭乗部支持軸95及び搭乗部13が傾斜するようになっている。
両駆動輪11a、11bには、固定軸91および、スライダ軸92が固定されており、搭乗部13が上端部に配設された搭乗部支持軸95の下側端部が固定軸91の中央の支持軸80hに軸支されている。
スライダ軸92には、該スライダ軸92に沿って水平方向に往復動可能なスライダ93が配置されており、スライダ93と搭乗部支持軸95とが、連結軸94によって連結されている。
このスライダ93の移動により、支持軸80hを支点として、搭乗部支持軸95及び搭乗部13が傾斜するようになっている。
図17(c)に示した車体傾斜機構では、両駆動輪11a、11b、両駆動輪11a、11bに固定された固定軸91、及び、固定軸91に下側端部が固定された搭乗部支持軸95から成る部分は傾斜せず、固定軸95の上端部に配設された搭乗部13が傾斜用モータ96の駆動によって傾斜するようになっている。
以上のように、車体の中心軸上の一点を中心として車体が傾斜する機構に、その中心軸まわりにトルクτ1を与えるアクチュエータと、車体の傾斜角を計測するセンサによって、車体を任意の角度に傾ける。
その際、回転中心の高さを車軸に合わせ、車体の傾斜に合わせてタイヤも傾けることにより、平衡傾斜角時の接地荷重中心点のズレを無くすことができる。
また、タイヤを傾けない場合には、回転中心を地面に近づけるほど、平衡傾斜角時の接地荷重中心点のズレを小さくすることができる。
その際、回転中心の高さを車軸に合わせ、車体の傾斜に合わせてタイヤも傾けることにより、平衡傾斜角時の接地荷重中心点のズレを無くすことができる。
また、タイヤを傾けない場合には、回転中心を地面に近づけるほど、平衡傾斜角時の接地荷重中心点のズレを小さくすることができる。
なお、車体傾斜機構については、その他各種機構、駆動力を使用するようにしてもよい。例えば、カム機構、ボールねじ、油圧シリンダなどの伸縮装置等を使用して、搭乗部13を傾斜させてもよい。
車体傾斜機構の動作と同時に、重心位置制御システム23は、ウェイト移動機構を使って、ウェイト134を目標位置ξB *へ移動することにより、重心位置を調整する(ステップ20)。
ウェイト134の目標位置ξB *は、ステップ18でウェイト移動機構に対して分配された接地荷重偏心度修正量の負担分ΔβB *に基づき、次の数式48によって決定される。
数式48において、θ1は車体傾斜角、aは車両の横方向加速度、gは重力加速度、Dはトレッド、mは車両の質量、mBはウェイトの質量である。
ウェイト134の目標位置ξB *は、ステップ18でウェイト移動機構に対して分配された接地荷重偏心度修正量の負担分ΔβB *に基づき、次の数式48によって決定される。
数式48において、θ1は車体傾斜角、aは車両の横方向加速度、gは重力加速度、Dはトレッド、mは車両の質量、mBはウェイトの質量である。
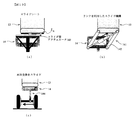
図18は、ウェイト134を目標位置ξ* Bに移動させるウェイト移動機構について、その構成例を表したものである。
このウェイト移動機構は、ウェイト移動手段として機能し、ウェイトを横方向に動かすことによって車両の重心を移動させる。この機構は、可動部の質量(慣性)が小さいため、重心を速く細かく移動させるのに適する。
このウェイト移動機構は、ウェイト移動手段として機能し、ウェイトを横方向に動かすことによって車両の重心を移動させる。この機構は、可動部の質量(慣性)が小さいため、重心を速く細かく移動させるのに適する。
ウェイト移動機構は、搭乗部13の座面部131の下部に配置されたウェイト134を横方向(車体対称面に垂直な方向)に移動させるように構成されている。
本実施形態である図18(a)のウェイト移動機構は、スライダ型アクチュエータ135によって、スライダ上でウェイト134を平行移動させる。
図18(b)に示すウェイト移動機構では、2つの伸縮型アクチュエータ136a、136bの一方を伸ばし、他方を縮めることで、ウェイト134を平行移動させる。
図18(c)に示すウェイト移動機構は、回転傾斜型ウェイトを用いた機構である。支持軸138の上端部にはウェイト134が配設され、支持軸138の下端部には、駆動輪軸139の中央に配置されたモータ140のロータが固定されている。そして、モータ140によって、支持軸138を半径とする円周上でウェイト134を移動させる。
本実施形態である図18(a)のウェイト移動機構は、スライダ型アクチュエータ135によって、スライダ上でウェイト134を平行移動させる。
図18(b)に示すウェイト移動機構では、2つの伸縮型アクチュエータ136a、136bの一方を伸ばし、他方を縮めることで、ウェイト134を平行移動させる。
図18(c)に示すウェイト移動機構は、回転傾斜型ウェイトを用いた機構である。支持軸138の上端部にはウェイト134が配設され、支持軸138の下端部には、駆動輪軸139の中央に配置されたモータ140のロータが固定されている。そして、モータ140によって、支持軸138を半径とする円周上でウェイト134を移動させる。
以上のように、車体対称面に垂直な方向に移動可能なウェイトと、そのウェイトに駆動力を与えるアクチュエータと、ウェイトの位置を検出するセンサによって、バランサを任意の位置に動かす。
なお、ウェイト134として、車体に元々搭載している重量物(バッテリ、ECUなど)を利用することで、本機構実現に伴う余分な重量増を無くすことができる。
また、ウェイト134の配置高さを高くすることにより、ウェイト移動(加減速)に伴う車体傾斜運動への反作用の効果が大きくなり、それを姿勢制御に利用することもできる。
なお、ウェイト134として、車体に元々搭載している重量物(バッテリ、ECUなど)を利用することで、本機構実現に伴う余分な重量増を無くすことができる。
また、ウェイト134の配置高さを高くすることにより、ウェイト移動(加減速)に伴う車体傾斜運動への反作用の効果が大きくなり、それを姿勢制御に利用することもできる。
車体傾斜機構、ウェイト移動機構の動作と同時に、重心位置制御システム23は、搭乗部移動機構を使って、搭乗部13を目標位置ξSL *に移動することにより、重心位置を調整する(ステップ21)。
搭乗部13の目標位置ξSL *は、ステップ18で搭乗部移動機構に対して分配された実質接地荷重偏心度修正量ΔβSL *に基づき、次の数式49によって決定される。
数式49において、θ1は車体傾斜角、aは車両の横方向加速度、gは重力加速度、Dはトレッド、mは車両の質量、mSLは搭乗部の質量である。
搭乗部13の目標位置ξSL *は、ステップ18で搭乗部移動機構に対して分配された実質接地荷重偏心度修正量ΔβSL *に基づき、次の数式49によって決定される。
数式49において、θ1は車体傾斜角、aは車両の横方向加速度、gは重力加速度、Dはトレッド、mは車両の質量、mSLは搭乗部の質量である。
図19は、搭乗部13を目標位置ξSL *に移動させる搭乗部移動機構についての構成例を表したものである。
この搭乗部移動機構は、搭乗部移動手段として機能し、搭乗部を横方向に動かすことによって、車両の重心を移動させる。この機構は可動部の質量(慣性)が大きいため重心をゆっくり大きく移動させるのに適する。また、重心移動において、搭乗部や乗員を傾ける必要がない。
この搭乗部移動機構は、搭乗部移動手段として機能し、搭乗部を横方向に動かすことによって、車両の重心を移動させる。この機構は可動部の質量(慣性)が大きいため重心をゆっくり大きく移動させるのに適する。また、重心移動において、搭乗部や乗員を傾ける必要がない。
搭乗部移動機構は、搭乗部13を横方向に移動させるように構成されている。
本実施形態である図19(a)の搭乗部移動機構では、スライダ型アクチュエータ140により、スライダ上で搭乗部13を左右に移動させる。
図19(b)の搭乗部移動機構では、平行四辺形リンク141とその対角線上に伸縮型アクチュエータ142を配置し、その伸縮によって平行四辺形リンクを変形させることで、搭乗部13をスライドさせる。
図19(c)の搭乗部移動機構では、支持部材(車台)14を駆動輪軸と平行に移動させる。
本実施形態である図19(a)の搭乗部移動機構では、スライダ型アクチュエータ140により、スライダ上で搭乗部13を左右に移動させる。
図19(b)の搭乗部移動機構では、平行四辺形リンク141とその対角線上に伸縮型アクチュエータ142を配置し、その伸縮によって平行四辺形リンクを変形させることで、搭乗部13をスライドさせる。
図19(c)の搭乗部移動機構では、支持部材(車台)14を駆動輪軸と平行に移動させる。
以上のように、車体対称面に垂直な方向に移動可能な搭乗部と、その搭乗部に駆動力を与えるアクチュエータと、搭乗部の位置を検出するセンサによって、搭乗部を任意の位置に動かす。
なお、スライド部の高さを車軸に近づけることにより、搭乗部の移動(加減速)に伴う車体傾斜運動への反作用の効果を小さくすることができる。
なお、スライド部の高さを車軸に近づけることにより、搭乗部の移動(加減速)に伴う車体傾斜運動への反作用の効果を小さくすることができる。
以上で説明した各重心位置調整機構(車体傾斜機構、ウェイト移動機構、搭乗部移動機構)を用いて、重心位置制御システム23は、実際の車体傾斜角θ1、ウェイト位置ξB、搭乗部位置ξSLが、目標とする車体傾斜角θ1 *、ウェイト位置ξB *、搭乗部位置ξSL *と一致するように制御する。
本実施形態では、重心位置調整機構の全体に対する状態フィードバック制御で、重心位置制御を実現する。
このとき、各アクチュエータから与えられる入力u(→)(車体傾斜アクチュエータ出力τ1、ウェイト移動アクチュエータ出力SB、搭乗部移動アクチュエータ出力SSL)は、次の数式50で表される。
また、数式50における状態量x(→)、目標状態量x(→*)、基準入力u(→*)の成分は、数式51に示すとおりである。
このとき、各アクチュエータから与えられる入力u(→)(車体傾斜アクチュエータ出力τ1、ウェイト移動アクチュエータ出力SB、搭乗部移動アクチュエータ出力SSL)は、次の数式50で表される。
また、数式50における状態量x(→)、目標状態量x(→*)、基準入力u(→*)の成分は、数式51に示すとおりである。
数式50において、Kはフィードバック行列であり、収束時間と安定性を考慮して、例えば最適レギュレータのゲイン設定手法により、予め設定しておく。
なお、数式51の目標状態量x(→*)における各目標値の変化速度θ1 *(・)、ξB *(・)、ξSL *(・)は、各目標値の差分によって求められるが、変化速度を無視して、θ1 *(・)=ξB *(・)=ξSL *(・)=0としてもよい。
なお、数式51の目標状態量x(→*)における各目標値の変化速度θ1 *(・)、ξB *(・)、ξSL *(・)は、各目標値の差分によって求められるが、変化速度を無視して、θ1 *(・)=ξB *(・)=ξSL *(・)=0としてもよい。
また、数式51に示す基準入力u(→*)の各成分は、次の数式52から得られる。
数式52において、aは車両の横方向加速度、gは重力加速度、m1は車体傾斜部の質量、mBはウェイトの質量、mSLは搭乗部の質量、mHは搭乗物の質量、λHは搭乗物の重心ズレを表す。
数式52において、aは車両の横方向加速度、gは重力加速度、m1は車体傾斜部の質量、mBはウェイトの質量、mSLは搭乗部の質量、mHは搭乗物の質量、λHは搭乗物の重心ズレを表す。
以上説明した実施形態では、1軸の二輪車における旋回限界向上制御を例に説明したが、本発明では、三輪以上の車両に対しても、本実施形態における旋回限界向上制御の方法を適用することが可能である。
11 駆動輪
12 駆動モータ
13 搭乗部
131 座面部
14 支持部材
16 制御ユニット
20 制御ECU
21 車体走行制御システム
22 横方向加速度決定システム
23 重心位置制御システム
24 外乱オブザーバ
25 重心位置推定システム
30 操縦装置
40 走行、姿勢制御用センサ
41 走行速度計
42 加速度計
43 車体傾斜角度計
50 重心位置測定用センサ
51 荷重計
52 座高計
60 アクチュエータ
61 駆動輪アクチュエータ
62 車体傾斜アクチュエータ
63 ウェイト駆動アクチュエータ
64 搭乗部駆動アクチュエータ
134 ウェイト
12 駆動モータ
13 搭乗部
131 座面部
14 支持部材
16 制御ユニット
20 制御ECU
21 車体走行制御システム
22 横方向加速度決定システム
23 重心位置制御システム
24 外乱オブザーバ
25 重心位置推定システム
30 操縦装置
40 走行、姿勢制御用センサ
41 走行速度計
42 加速度計
43 車体傾斜角度計
50 重心位置測定用センサ
51 荷重計
52 座高計
60 アクチュエータ
61 駆動輪アクチュエータ
62 車体傾斜アクチュエータ
63 ウェイト駆動アクチュエータ
64 搭乗部駆動アクチュエータ
134 ウェイト
Claims (9)
- 互いに対向配置された2つの駆動輪を含む車両であって、
重量体を乗せる搭乗部と、
重心位置を取得する重心位置取得手段と、
車軸に対して水平方向の加速度成分である横方向加速度を取得する横方向加速度取得手段と、
前記取得した重心位置と横方向加速度の大きさに応じて、前記重心位置の左右方向の移動量を決定する移動量決定手段と、
前記決定した重心位置の移動量に従って、前記重心位置を移動させる重心移動手段と、
を具備したことを特徴とする車両。
- 前記2つの駆動輪それぞれの回転速度を取得する回転速度取得手段を備え、
前記横方向加速度取得手段は、前記取得した2つの駆動輪の各回転速度を用いて前記横方向加速度を算出する、ことを特徴とする請求項1に記載の車両。 - 車両に配設された加速度計を備え、
前記横方向加速度取得手段は、前記加速度計による測定値を用いて横方向加速度を算出する、
ことを特徴とする請求項1に記載の車両。 - 前記搭乗部に配置された荷重センサと、
前記重量体の高さを測定する高さセンサと、
を備え、
前記重心位置取得手段は、前記荷重センサ及び前記高さセンサの検出値から、重心位置を取得する、
ことを特徴とする請求項1、請求項2又は請求項3に記載の車両。 - 前記重心位置取得手段は、外乱オブザーバを使用して重心位置を取得する、
ことを特徴とする請求項1、請求項2又は請求項3に記載の車両。 - 前記搭乗部に配置された荷重センサと、
前記重量体の高さを測定する高さセンサと、
前記荷重センサ及び前記高さセンサの検出値から、重心位置を取得する直接取得手段と、
重心位置を外乱オブザーバにより取得する間接取得手段と、を備え、
前記重心位置取得手段は、前記直接取得手段及び間接取得手段による取得値に基づいて、重心位置を取得する、
ことを特徴とする請求項1、請求項2又は請求項3に記載の車両。 - 前記重心移動手段は、
前記左右方向に車体を傾斜させる車体傾斜手段と、
前記左右方向にウェイトを移動させるウェイト移動手段と、
前記左右方向に前記搭乗部を移動させる搭乗部移動手段、
のうちの少なくとも1つを備えることを特徴とする請求項1から請求項6のうちのいずれか1の請求項に記載の車両。 - 前記重心移動手段は、前記車体傾斜手段と、前記ウェイト移動手段と、前記搭乗部移動手段のうちの2つ以上を備え、
前記移動量決定手段は、前記決定した重心の移動量を、前記重心移動手段が備える、前記車体傾斜手段と、前記ウェイト移動手段と、前記搭乗部移動手段のうちの2つ以上に分配する分配手段を備える、
ことを特徴とする請求項7に記載の車両。 - 前記分配手段は、前記決定した重心の移動量の周波数成分に基づいて分配する、
ことを特徴とする請求項8に記載の車両。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006201159A JP2008024235A (ja) | 2006-07-24 | 2006-07-24 | 車両 |
| CN2007800275873A CN101489861B (zh) | 2006-07-24 | 2007-07-24 | 车辆 |
| PCT/JP2007/064489 WO2008013165A1 (en) | 2006-07-24 | 2007-07-24 | Vehicle |
| EP07791221A EP2045180A1 (en) | 2006-07-24 | 2007-07-24 | Vehicle |
| US12/374,851 US20100071984A1 (en) | 2006-07-24 | 2007-07-24 | Vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006201159A JP2008024235A (ja) | 2006-07-24 | 2006-07-24 | 車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008024235A true JP2008024235A (ja) | 2008-02-07 |
Family
ID=38981476
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006201159A Pending JP2008024235A (ja) | 2006-07-24 | 2006-07-24 | 車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20100071984A1 (ja) |
| EP (1) | EP2045180A1 (ja) |
| JP (1) | JP2008024235A (ja) |
| CN (1) | CN101489861B (ja) |
| WO (1) | WO2008013165A1 (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009292244A (ja) * | 2008-06-04 | 2009-12-17 | Equos Research Co Ltd | 走行車両 |
| JP2010006358A (ja) * | 2008-05-30 | 2010-01-14 | Equos Research Co Ltd | 走行車両 |
| JP2010036689A (ja) * | 2008-08-04 | 2010-02-18 | Equos Research Co Ltd | 車両 |
| WO2010035324A1 (ja) * | 2008-09-25 | 2010-04-01 | トヨタ自動車株式会社 | 自走車とその制御装置及び制御方法 |
| JP2010228743A (ja) * | 2009-03-05 | 2010-10-14 | Equos Research Co Ltd | 車両 |
| JP2010260532A (ja) * | 2009-04-10 | 2010-11-18 | Equos Research Co Ltd | 車両 |
| JP2011046296A (ja) * | 2009-08-27 | 2011-03-10 | Equos Research Co Ltd | 三輪車両 |
| JP2011063238A (ja) * | 2009-09-18 | 2011-03-31 | Honda Motor Co Ltd | 移動体、制御装置、および、制御方法 |
| JP2014189196A (ja) * | 2013-03-27 | 2014-10-06 | Honda Motor Co Ltd | 倒立振子型車両 |
| KR101473862B1 (ko) | 2013-08-27 | 2014-12-17 | 김준형 | 투휠 셀프 밸런싱 휠체어 |
| JP2020515469A (ja) * | 2017-03-30 | 2020-05-28 | リット モーターズ コーポレイション | 二輪車の増補型タイヤトラクションシステム |
| JP2020519217A (ja) * | 2016-12-14 | 2020-06-25 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | ステータに対して相対的な搬送体のコントロールされた搬送のためのステータを備えた搬送装置 |
| US11648994B2 (en) | 2018-03-07 | 2023-05-16 | Lit Motors Corporation | Integrated control method for balancing a two-wheeled vehicle using control moment gyroscopes and drive-by-wire steering systems |
| US12012156B2 (en) | 2021-04-29 | 2024-06-18 | Lit Motors Corporation | Yaw damper for two-wheeled self-balancing vehicle |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4735598B2 (ja) * | 2007-04-27 | 2011-07-27 | トヨタ自動車株式会社 | 倒立車輪型移動体、及びその制御方法 |
| CN102149597A (zh) * | 2008-10-22 | 2011-08-10 | 株式会社爱考斯研究 | 车辆 |
| JP2010125969A (ja) * | 2008-11-27 | 2010-06-10 | Toyota Motor Corp | 移動体 |
| US9096232B2 (en) * | 2009-01-13 | 2015-08-04 | Toyota Jidosha Kabushiki Kaisha | Vehicle condition estimating device |
| JP2010225139A (ja) * | 2009-02-27 | 2010-10-07 | Toshiba Corp | 移動機器 |
| US8522902B2 (en) * | 2009-09-18 | 2013-09-03 | Honda Motor Co., Ltd. | Inverted pendulum type vehicle |
| JP5358374B2 (ja) * | 2009-09-24 | 2013-12-04 | 本田技研工業株式会社 | 車両 |
| WO2011125117A1 (ja) * | 2010-04-06 | 2011-10-13 | トヨタ自動車株式会社 | 走行装置、その制御方法及び制御プログラム |
| JP5278598B2 (ja) * | 2010-04-06 | 2013-09-04 | トヨタ自動車株式会社 | 移動体制御装置、その制御方法及び制御プログラム |
| KR20110118963A (ko) * | 2010-04-26 | 2011-11-02 | 한국생산기술연구원 | 비접촉 충전 발열 장치 |
| KR101079755B1 (ko) * | 2010-06-14 | 2011-11-03 | 김준형 | 핸즈프리형 전동스쿠터 |
| CN102821730B (zh) * | 2010-09-13 | 2015-09-30 | 松下知识产权经营株式会社 | 搭乘型移动体及搭乘型移动体的控制方法 |
| JP2012126224A (ja) * | 2010-12-15 | 2012-07-05 | Bosch Corp | 倒立振子型移動体 |
| US8825294B2 (en) * | 2011-07-28 | 2014-09-02 | Deere & Company | Vehicle center of gravity active suspension control system |
| US8684123B2 (en) * | 2011-08-02 | 2014-04-01 | Shane Chen | Low-profile two-wheeled self-balancing vehicle with exterior foot platforms |
| US8584782B2 (en) * | 2011-08-02 | 2013-11-19 | Shane Chen | Two-wheeled self-balancing motorized personal vehicle with tilting wheels |
| US9045190B2 (en) * | 2011-08-02 | 2015-06-02 | Shane Chen | Two-wheeled self-balancing motorized personal vehicle with tilting wheels |
| AU2015249084B2 (en) * | 2012-02-09 | 2017-09-07 | Omeo Group Limited | Powered Mobility Device with Tilt Mechanism Having Multiple Pivots |
| WO2014007657A1 (en) * | 2012-02-09 | 2014-01-09 | Kevin Thomas Halsall | Powered mobility device |
| DE102012007875A1 (de) * | 2012-04-19 | 2013-10-24 | Werner Dombrowsky | Korrektur des Schwerpunkts bei Fahrzeugen durch Masseverschiebung |
| JP6081271B2 (ja) | 2013-03-29 | 2017-02-15 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6111119B2 (ja) * | 2013-03-29 | 2017-04-05 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6062785B2 (ja) | 2013-03-29 | 2017-01-18 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6062784B2 (ja) | 2013-03-29 | 2017-01-18 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6081270B2 (ja) * | 2013-03-29 | 2017-02-15 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6099484B2 (ja) | 2013-05-31 | 2017-03-22 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6099485B2 (ja) | 2013-05-31 | 2017-03-22 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP6099483B2 (ja) | 2013-05-31 | 2017-03-22 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP2015013624A (ja) * | 2013-07-08 | 2015-01-22 | 船井電機株式会社 | 手動推進器具 |
| DE102013016118A1 (de) * | 2013-09-26 | 2015-03-26 | Grenzebach Maschinenbau Gmbh | Transportfahrzeug und Verfahren zum störungsfreien Transport von Lastregalen in Werkshallen mit teilweise autonomem Fahrbetrieb |
| CN103600796B (zh) * | 2013-10-17 | 2018-02-09 | 上海交通大学 | 一种单轴驱动的两轮自平衡车 |
| JP6596065B2 (ja) * | 2014-07-18 | 2019-10-23 | ピアッジオ・エ・チ・ソチエタ・ペル・アツィオーニ | アンチロールスタビライザー装置を備えた三輪以上の車両及び三輪以上の車両のアンチロール制御方法 |
| JP6164661B2 (ja) * | 2015-10-29 | 2017-07-19 | アールオービーオー3 カンパニーリミテッド | 大腿部操向型セルフバランススクーター |
| DE102016211427A1 (de) * | 2016-06-27 | 2017-12-28 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Zweirads, Vorrichtung, Zweirad |
| JP6920871B2 (ja) * | 2017-04-24 | 2021-08-18 | 本田技研工業株式会社 | 倒立振子型車両 |
| US11703859B2 (en) * | 2019-07-05 | 2023-07-18 | Liebherr Mining Equipment Newport News Co. | Method for autonomously controlling a vehicle |
| KR102946400B1 (ko) * | 2020-11-17 | 2026-04-02 | 삼성전자주식회사 | 이동 로봇 장치 및 이의 제어 방법 |
| CN115675397B (zh) * | 2022-11-11 | 2023-11-24 | 江苏天一航空工业股份有限公司 | 一种物流行李牵引车线控助力制动系统及方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002538891A (ja) * | 1999-03-15 | 2002-11-19 | デカ・プロダクツ・リミテッド・パートナーシップ | 車椅子用制御システム及び方法 |
| JP2006001385A (ja) * | 2004-06-16 | 2006-01-05 | Sony Corp | 平行二輪車 |
| JP2006123854A (ja) * | 2004-11-01 | 2006-05-18 | Matsushita Electric Ind Co Ltd | 荷物運搬ロボット |
| JP2006136962A (ja) * | 2004-11-11 | 2006-06-01 | Hitachi Ltd | 移動ロボット |
| JP2006176088A (ja) * | 2004-12-24 | 2006-07-06 | Equos Research Co Ltd | 車両 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6779621B2 (en) * | 1993-02-24 | 2004-08-24 | Deka Products Limited Partnership | Riderless stabilization of a balancing transporter |
| US7370713B1 (en) * | 1993-02-24 | 2008-05-13 | Deka Products Limited Partnership | Personal mobility vehicles and methods |
| US6837327B2 (en) * | 1993-02-24 | 2005-01-04 | Deka Products Limited Partnership | Controlled balancing toy |
| US6827163B2 (en) * | 1994-05-27 | 2004-12-07 | Deka Products Limited Partnership | Non-linear control of a balancing vehicle |
| US6561294B1 (en) * | 1995-02-03 | 2003-05-13 | Deka Products Limited Partnership | Balancing vehicle with passive pivotable support |
| JP2004129435A (ja) | 2002-10-04 | 2004-04-22 | Sony Corp | 搬送装置、制御方法、及び駆動機構 |
| JP2004276727A (ja) | 2003-03-14 | 2004-10-07 | Matsushita Electric Works Ltd | 人用移動機器とその制動方法 |
| EP1632428A4 (en) * | 2003-06-12 | 2010-08-25 | Toyota Motor Co Ltd | COAXIAL MOTORCYCLE |
| CN2679014Y (zh) * | 2003-12-11 | 2005-02-16 | 傅胜国 | 一种智能两轮电动车 |
| JP4650327B2 (ja) * | 2005-04-14 | 2011-03-16 | トヨタ自動車株式会社 | 同軸二輪車 |
-
2006
- 2006-07-24 JP JP2006201159A patent/JP2008024235A/ja active Pending
-
2007
- 2007-07-24 CN CN2007800275873A patent/CN101489861B/zh not_active Expired - Fee Related
- 2007-07-24 EP EP07791221A patent/EP2045180A1/en not_active Withdrawn
- 2007-07-24 US US12/374,851 patent/US20100071984A1/en not_active Abandoned
- 2007-07-24 WO PCT/JP2007/064489 patent/WO2008013165A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002538891A (ja) * | 1999-03-15 | 2002-11-19 | デカ・プロダクツ・リミテッド・パートナーシップ | 車椅子用制御システム及び方法 |
| JP2006001385A (ja) * | 2004-06-16 | 2006-01-05 | Sony Corp | 平行二輪車 |
| JP2006123854A (ja) * | 2004-11-01 | 2006-05-18 | Matsushita Electric Ind Co Ltd | 荷物運搬ロボット |
| JP2006136962A (ja) * | 2004-11-11 | 2006-06-01 | Hitachi Ltd | 移動ロボット |
| JP2006176088A (ja) * | 2004-12-24 | 2006-07-06 | Equos Research Co Ltd | 車両 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010006358A (ja) * | 2008-05-30 | 2010-01-14 | Equos Research Co Ltd | 走行車両 |
| JP2009292244A (ja) * | 2008-06-04 | 2009-12-17 | Equos Research Co Ltd | 走行車両 |
| JP2010036689A (ja) * | 2008-08-04 | 2010-02-18 | Equos Research Co Ltd | 車両 |
| WO2010035324A1 (ja) * | 2008-09-25 | 2010-04-01 | トヨタ自動車株式会社 | 自走車とその制御装置及び制御方法 |
| JP2010228743A (ja) * | 2009-03-05 | 2010-10-14 | Equos Research Co Ltd | 車両 |
| JP2010260532A (ja) * | 2009-04-10 | 2010-11-18 | Equos Research Co Ltd | 車両 |
| JP2011046296A (ja) * | 2009-08-27 | 2011-03-10 | Equos Research Co Ltd | 三輪車両 |
| JP2011063238A (ja) * | 2009-09-18 | 2011-03-31 | Honda Motor Co Ltd | 移動体、制御装置、および、制御方法 |
| JP2014189196A (ja) * | 2013-03-27 | 2014-10-06 | Honda Motor Co Ltd | 倒立振子型車両 |
| KR101473862B1 (ko) | 2013-08-27 | 2014-12-17 | 김준형 | 투휠 셀프 밸런싱 휠체어 |
| JP2020519217A (ja) * | 2016-12-14 | 2020-06-25 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | ステータに対して相対的な搬送体のコントロールされた搬送のためのステータを備えた搬送装置 |
| JP2020515469A (ja) * | 2017-03-30 | 2020-05-28 | リット モーターズ コーポレイション | 二輪車の増補型タイヤトラクションシステム |
| US11332204B2 (en) | 2017-03-30 | 2022-05-17 | Lit Motors Corporation | Augmented tire traction system for two-wheeled vehicle |
| JP7281206B2 (ja) | 2017-03-30 | 2023-05-25 | リット モーターズ コーポレイション | 二輪車の増補型タイヤトラクションシステム |
| US11648994B2 (en) | 2018-03-07 | 2023-05-16 | Lit Motors Corporation | Integrated control method for balancing a two-wheeled vehicle using control moment gyroscopes and drive-by-wire steering systems |
| US12012156B2 (en) | 2021-04-29 | 2024-06-18 | Lit Motors Corporation | Yaw damper for two-wheeled self-balancing vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101489861A (zh) | 2009-07-22 |
| EP2045180A1 (en) | 2009-04-08 |
| WO2008013165A1 (en) | 2008-01-31 |
| US20100071984A1 (en) | 2010-03-25 |
| CN101489861B (zh) | 2011-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008024235A (ja) | 車両 | |
| JP5152673B2 (ja) | 横置き二輪車両 | |
| WO2008026725A1 (fr) | Vehicule | |
| WO2007129505A1 (ja) | 車両、特性量推定装置及び搭載物判定装置 | |
| JP5024652B2 (ja) | 車両 | |
| JP5083648B2 (ja) | 車両 | |
| JP2009044828A (ja) | 車両 | |
| JP4888778B2 (ja) | 車両 | |
| WO2010116641A1 (ja) | 車両 | |
| JP2007302061A (ja) | 車両 | |
| JP5004003B2 (ja) | 車両 | |
| JP5041205B2 (ja) | 車両 | |
| CN102378700B (zh) | 车辆 | |
| JP5024662B2 (ja) | 車両 | |
| JP5428806B2 (ja) | 車両 | |
| JP5041204B2 (ja) | 車両 | |
| JP2009159719A (ja) | 車両 | |
| JP5182657B2 (ja) | 車両 | |
| JP4873305B2 (ja) | 車両 | |
| JP5046084B2 (ja) | 車両 | |
| JP5392027B2 (ja) | 車両 | |
| JP5013244B2 (ja) | 特性量推定装置及び搭載物判定装置 | |
| JP4858847B2 (ja) | 車両 | |
| JP2009118720A (ja) | 車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111007 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120614 |