JP2008024277A - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2008024277A JP2008024277A JP2006206885A JP2006206885A JP2008024277A JP 2008024277 A JP2008024277 A JP 2008024277A JP 2006206885 A JP2006206885 A JP 2006206885A JP 2006206885 A JP2006206885 A JP 2006206885A JP 2008024277 A JP2008024277 A JP 2008024277A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- torque
- steering
- duty ratio
- electric power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【解決手段】ステアリング機構に操舵補助トルクを伝達する電動モータ12と、操舵トルクに基づく電流指令値に応じて前記電動モータ12をパルス幅変調信号によって駆動制御するモータ制御部24とを備え、前記モータ制御部24は、前記電動モータ12のモータトルクを検出するモータトルク検出部67と、検出したモータトルクの変化率を演算するモータトルク変化率検出部68と、演算したモータトルク変化率が操舵限界を判断する閾値以上であるときに前記パルス幅変調信号のデューティ比を前記ステアリング機構の前記ステアリングシャフト及び転舵輪間のトルク伝達部材に伝達されるトルクを抑制する所定値に固定するデューティ比制限部64とを有する。
【選択図】図3
Description
一般に、ステアリング機構では、ステアリングホイールを中立位置から左及び右の何れの操舵方向に操舵を続けると、ステアリングホイールの操作量がその最大値に相当する最大舵角に達すると、ステアリング機構がメカニカルストッパに当接してそれ以上の操舵ができない操舵限界位置となる。このような操舵限界位置となって、メカニカルストッパに当接する状態となることを所謂端当てと称している。
このため、従来、端当て時の衝撃を緩和するように構成された電動パワーステアリング装置として、舵角が最大舵角近傍の所定舵角を超えると電動機の操舵補助トルクを低減補正するアンローダ補正部を有し、このアンローダ補正部は、操舵速度が速いほど前記補助操舵トルクの低減補正量を増大修正することを特徴とする電動パワーステアリング装置が知られている(例えば、特許文献1参照)。
ところが、上記特許文献1に記載の従来例にあっては、最大舵角近傍において操舵補助トルクの低減補正量を増大修正するようにしているので、舵角を検出するセンサが必要となると共に、操舵速度が速い場合には、電動機の慣性により、必ずしも端当て時の衝撃を十分に緩和することができないという未解決の課題がある。
上記各従来例にあっては、ステアリング機構がメカニカルストッパに当接する端当て時やタイヤが縁石等に当接した時などの操舵限界位置となった時の衝撃を緩和できるものであるが、第1及び第2の従来例のようにソフトウェアによる対策では、ステアリングホイールの絶対角度情報を使用するため、高精度の舵角センサ又は絶対舵角推定機能が必要となり、横滑り防止装置用の低精度の舵角センサを流用することはできず、高価な舵角センサや絶対舵角推定機能を必要とするので、製造コストが嵩むという未解決の課題がある。
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、別途舵角センサやトルクリミッタ等を追加することなく、端当て時やタイヤが縁石等に当接した時などの操舵限界位置となった時に中間シャフト等のトルク伝達部材に伝達される衝撃力を緩和することができる電動パワーステアリング装置を提供することを目的としている。
さらにまた、請求項4に係る電動パワーステアリング装置は、請求項1乃至3の何れか1つの発明において、前記デューティ比制限部は、前記モータトルクの変化率が閾値以上で、且つ前記モータトルク検出部で検出したモータトルクの絶対値が所定値以上であるときにデューティ比制限条件を満足したものと判断してデューティ比を前記所定値に固定するように構成されていることを特徴としている。
また、請求項10に係る電動パワーステアリング装置は、請求項9に係る発明において、前記デューティ比の前記所定値への固定を解除する所定時間はモータ角速度に基づいて設定されることを特徴としている。
さらにまた、請求項12に係る電動パワーステアリング装置は、請求項1乃至11の何れか1つに係る発明において、前記モータ制御部は、前記パルス幅変調信号によって駆動されて電動モータにモータ電流を供給するインバータを有し、前記デューティ比制限部は、前記デューティ比制限条件を満足したときに前記インバータの上アーム及び下アームの何れか一方を同時にオン状態として電磁ブレーキモードに制御するようにしたことを特徴としている。
また、請求項14に係る電動パワーステアリング装置は、請求項1乃至13の何れか1つの発明において、前記ステアリング機構は、ステアリングギヤのラックストロークエンドに緩衝材を備えていることを特徴としている。
図1は、本発明に一実施形態を示す概略構成図であって、図中、SMはステアリング機構である。このステアリング機構SMは、ステアリングホイール1に運転者から作用される操舵力が伝達される入力軸2aとこの入力軸2aに図示しないトーションバーを介して連結された出力軸2bとを有するステアリングシャフト2を備えている。このステアリングシャフト2は、ステアリングコラム3に回転自在に内装され、入力軸2aの一端がステアリングホイール1に連結され、他端は図示しないトーションバーに連結されている。
このピニオンシャフト7に伝達された操舵力はステアリングギヤ8を介して左右のタイロッド9に伝達され、これらタイロッド9によって図示しない転舵輪を転舵させる。ここで、ステアリングギヤ8は、図2に示すように、ギヤハウジング8a内に、ピニオンシャフト7に連結されたピニオン8bとこのピニオン8bに噛合するラック軸8cとを有するラックアンドピニオン形式に構成され、ピニオン8bに伝達された回転運動をラック軸8cで直進運動に変換している。
また、減速ギヤ11のステアリングホイール1側に連接されたハウジング13内に操舵トルクセンサ14が配設されている。この操舵トルクセンサ14は、ステアリングホイール1に付与されて入力軸2aに伝達された操舵トルクを検出するもので、例えば、操舵トルクを入力軸2a及び出力軸2b間に介挿した図示しないトーションバーの捩れ角変位に変換し、この捩れ角変位を非接触の磁気センサで検出するように構成されている。
この操舵補助トルク指令値算出マップは、図4に示すように、横軸に操舵トルクTをとり、縦軸に操舵補助トルク指令値IM *をとると共に、車速Vをパラメータとした放物線状の曲線で表される特性線図で構成され、操舵トルクTが“0”からその近傍の設定値Ts1までの間は操舵補助トルク指令値IM *が“0”を維持し、操舵トルクTが設定値Ts1を超えると最初は操舵補助指令値IM *が操舵トルクTの増加に対して比較的緩やかに増加するが、さらに操舵トルクTが増加すると、その増加に対して操舵補助トルク指令値IM *が急峻に増加するように設定され、この特性曲線が車速の増加に従って傾きが小さくなるように設定されている。
J・α+ Fr・sign(ω) + SAT = Tm + T …(1)
ここで、上記(1)式を初期値ゼロとしてラプラス変換し、セルフアライニングトルクSATについて解くと下記(2)式が得られる。
SAT(s) = Tm(s) + T(s) − J・α(s) + Fr・sign(ω(s)) …(2)
Tma= Kt・Iq−Jm・α ……(3)
ここで、Ktはモータのトルク定数、Jmはモータのロータ部の慣性モーメントである。
今、車両の走行を開始するために、イグニッションスイッチIGをオン状態とすることにより、コントローラ15に電源が投入されて、操舵補助制御処理が実行開始される。
このため、操舵トルクセンサ14で検出した操舵トルクT、車速センサ16で検出した車速V、モータ電流検出部60u〜60wで検出したモータ電流検出値Iu〜Iw、回転角センサ17で検出したモータ回転角θがコントローラ15に供給される。
一方、回転角センサ17で検出したモータ回転角θが角速度演算部31に入力されてモータ角速度ωが算出され、このモータ角速度ωが角加速度演算部32に入力されてモータ角加速度αが算出される。
このd−q軸電流指令値演算部23で、補償後トルク指令値IM *′に応じた値のd軸目標電流Id*及びq軸目標電流Iq*が算出され、これらが2相/3相変換部54で3相の電流指令値Iu*〜Iw*に変換されてモータ電流制御部24に出力される。
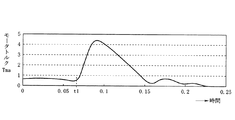
なお、上記実施形態においては、ラック軸8cに緩衝部材8eを設けることにより、端当て時から中間シャフト5にピークトルクが発生するまでの時間を遅延させる場合について説明したが、これに限定されるものではなく、中間シャフト5の両端に取付けたユニバーサルジョイント4及び6のヨーク4a,4b及び6a,6bをプレス成形することにより、高強度の鍛造成形ヨークに対して剛性を低下させて、操舵限界位置への到達時から中間シャフト5にピークトルクが発生するまでの時間を長くすることができる。この場合には、ヨークをプレス成形するので、鍛造成形ヨークより低コストで製作することができると共に、操舵限界位置への到達時から中間シャフト5にピークトルクが発生するまでの時間を長くできるので、演算処理能力の低いマイクロコンピュータ等の演算処理装置を適用することができ、よりコストを低減することができる利点がある。
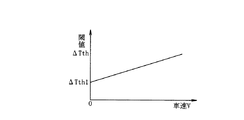
この図10の処理が閾値設定手段に対応している。
このように、操舵限界を判断する閾値ΔTthを車速Vの増加に応じて増加させることにより、車速が速くなるに応じて端当て状態まで操舵することはなくなるので、端当て状態の誤検出を確実に防止することができる。
さらに、上記実施形態においては、d−q軸電流指令値演算部23に2相/3相変換部54を設けた場合について説明したが、これに限定されるものではなく、2相/3相変換部54を省略し、これに代えてモータ電流検出部60の出力側に3相/2相変換部を設け、d軸電流Id及びq軸電流Iqに変換し、2つの減算部でd軸目標電流Id*及びq軸目標電流Iq*とモータのd軸電流Id及びq軸電流Iqとの偏差を算出するようにしてもよい。
このステップS6では、慣性補償部34と同様に、モータ角加速度αに基づいて慣性補償値Iiを算出し、次いでステップS7に移行してSAT推定フィードバック部35と同様にモータ角速度ω及びモータ角加速度αをもとに前述した(2)式の演算を行ってセルフアライニングトルクSATを算出する。
ω=(Vm−Im・Rm)/K0 …………(4)
ここで、Rmはモータ巻線抵抗、K0はモータの起電力定数である。
Claims (14)
- ステアリング機構に入力される操舵トルクを検出する操舵トルク検出部と、少なくとも前記操舵トルク検出手段で検出した操舵トルクに基づいて電流指令値を演算する電流指令値演算部と、前記ステアリング機構のステアリングシャフトに与える操舵補助トルクを発生する電動モータと、前記電流指令値に基づいて前記電動モータをパルス幅変調信号によって駆動制御するモータ制御部とを備えた電動パワーステアリング装置であって、
前記モータ制御部は、前記電動モータと前記ステアリングシャフト間に発生しているモータトルクを検出するモータトルク検出部と、該モータトルク検出部で検出したモータトルクの変化率を演算するモータトルク変化率検出部と、該モータトルク変化率検出部で演算したモータトルクの変化率が操舵限界を判断する閾値以上であるときにデューティ比制限条件を満足したものと判断して前記パルス幅変調信号のデューティ比を前記ステアリング機構の前記ステアリングシャフト及び転舵輪間のトルク伝達部材に伝達されるトルクを抑制する所定値に固定するデューティ比制限部とを有することを特徴とする電動パワーステアリング装置。 - 前記モータトルク検出部は、前記電動モータの駆動電流を検出する駆動電流検出部と、前記電動モータの回転角加速度を検出する回転角加速度検出部と、前記駆動電流検出部で検出したモータ駆動電流と前記回転角加速度検出部で検出した回転角加速度から前記電動モータと前記ステアリングシャフトとの間に発生しているトルクを演算するモータトルク演算部とを備えていることを特徴とする請求項1に記載の電動パワーステアリング装置。
- 前記モータトルク検出部は、前記電動モータの出力軸から前記ステアリングシャフトに至る間のトルク伝達軸に配設した磁歪式トルクセンサで構成されていることを特徴とする請求項1に記載の電動パワーステアリング装置。
- 前記デューティ比制限部は、前記モータトルクの変化率が閾値以上で、且つ前記モータトルク検出部で検出したモータトルクの絶対値が所定値以上であるときにデューティ比制限条件を満足したものと判断してデューティ比を前記所定値に固定するように構成されていることを特徴とする請求項1乃至3の何れか1項に記載の電動パワーステアリング装置。
- 前記デューティ比制限部は、前記モータトルクの変化率が閾値以上で、且つ前記モータトルク検出部で検出したモータトルクの絶対値が所定値以上である状態を所定時間以上継続したときにデューティ比制限条件を満足したものと判断して前記デューティ比を前記所定値に固定するように構成されていることを特徴とする請求項1乃至3の何れか1項に記載の電動パワーステアリング装置。
- 前記デューティ比制限部は、前記デューティ比制限条件を満足したものと判断し、且つ前記モータトルクの変化率の符号とモータトルク演算値の符号とが一致した場合に、前記デューティ比を前記所定値に固定するように構成されていることを特徴とする請求項1乃至5の何れか1項に記載の電動パワーステアリング装置。
- 前記電動モータのモータ角速度を検出するモータ角速度検出手段を備え、前記デューティ比制限部は、前記デューティ比制限条件を満足したものと判断し、且つ前記モータ角速度検出手段で検出したモータ角速度が所定値以上である場合に、前記デューティ比を前記所定値に固定するように構成されていることを特徴とする請求項1乃至5の何れか1項に記載の電動パワーステアリング装置。
- 前記電動モータのモータ角速度を検出するモータ角速度検出手段を備え、前記デューティ比制限部は、前記デューティ比制限条件を満足したものと判断し、且つ前記モータ角速度検出手段で所定時間前に検出したモータ角速度が所定値以上である場合に、前記デューティ比を前記所定値に固定するように構成されていることを特徴とする請求項1乃至5の何れか1項に記載の電動パワーステアリング装置。
- 前記デューティ比制限部段は、デューティ比を前記所定値に固定してから所定時間が経過したときにデューティ比の前記所定値への固定を解除するように構成されていることを特徴とする請求項1乃至8の何れか1項に記載の電動パワーステアリング装置。
- 前記デューティ比の前記所定値への固定を解除する所定時間はモータ角速度に基づいて設定されることを特徴とする請求項9に記載の電動パワーステアリング装置。
- 車速を検出する車速検出手段を有し、前記デューティ比制限部は、前記操舵限界を判断する閾値を前記車速検出手段で検出した車速の増加に応じて増加させる閾値設定手段を備えていることを特徴とする請求項1乃至10の何れか1項に記載の電動パワーステアリング装置。
- 前記モータ制御部は、前記パルス幅変調信号によって駆動されて電動モータにモータ電流を供給するインバータを有し、前記デューティ比制限部は、前記デューティ比制限条件を満足したときに前記インバータの上アーム及び下アームの何れか一方を同時にオン状態として電磁ブレーキモードに制御するようにしたことを特徴とする請求項1乃至11の何れか1項に記載の電動パワーステアリング装置。
- 前記ステアリング機構のトルク伝達部材は、ステアリングシャフトにプレス成形によって製作されたヨークを有するジョイントを介して接続された中間シャフトを有することを特徴とする請求項1乃至12の何れか1項に記載の電動パワーステアリング装置。
- 前記ステアリング機構は、ステアリングギヤのラックストロークエンドに緩衝材を備えていることを特徴とする請求項1乃至13の何れか1項に記載の電動パワーステアリング装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006206885A JP4857991B2 (ja) | 2006-06-21 | 2006-07-28 | 電動パワーステアリング装置 |
| EP07011145A EP1864886A2 (en) | 2006-06-07 | 2007-06-06 | Electric power steering apparatus |
| US11/759,444 US20070284180A1 (en) | 2006-06-07 | 2007-06-07 | Electric power steering apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006171745 | 2006-06-21 | ||
| JP2006171745 | 2006-06-21 | ||
| JP2006206885A JP4857991B2 (ja) | 2006-06-21 | 2006-07-28 | 電動パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008024277A true JP2008024277A (ja) | 2008-02-07 |
| JP4857991B2 JP4857991B2 (ja) | 2012-01-18 |
Family
ID=39115346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006206885A Expired - Fee Related JP4857991B2 (ja) | 2006-06-07 | 2006-07-28 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4857991B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2279927A2 (en) | 2009-07-31 | 2011-02-02 | JTEKT Corporation | Electric power steering system |
| KR20150007486A (ko) * | 2013-07-11 | 2015-01-21 | 현대자동차주식회사 | 전동식 조향 장치의 언더 스티어링 검출 방법 |
| CN108327781A (zh) * | 2017-01-18 | 2018-07-27 | 株式会社捷太格特 | 电动转向式转向操纵装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002293256A (ja) * | 2001-03-29 | 2002-10-09 | Nissan Motor Co Ltd | 電動パワーステアリング装置 |
| JP2005289296A (ja) * | 2004-04-02 | 2005-10-20 | Denso Corp | 電動パワーステアリング装置及び電動パワーステアリング装置の組み付け方法 |
-
2006
- 2006-07-28 JP JP2006206885A patent/JP4857991B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002293256A (ja) * | 2001-03-29 | 2002-10-09 | Nissan Motor Co Ltd | 電動パワーステアリング装置 |
| JP2005289296A (ja) * | 2004-04-02 | 2005-10-20 | Denso Corp | 電動パワーステアリング装置及び電動パワーステアリング装置の組み付け方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2279927A2 (en) | 2009-07-31 | 2011-02-02 | JTEKT Corporation | Electric power steering system |
| EP2279927A3 (en) * | 2009-07-31 | 2011-03-02 | JTEKT Corporation | Electric power steering system |
| US8272474B2 (en) | 2009-07-31 | 2012-09-25 | Jtekt Corporation | Electric power steering system |
| KR20150007486A (ko) * | 2013-07-11 | 2015-01-21 | 현대자동차주식회사 | 전동식 조향 장치의 언더 스티어링 검출 방법 |
| KR101947191B1 (ko) | 2013-07-11 | 2019-02-12 | 현대자동차주식회사 | 전동식 조향 장치의 언더 스티어링 검출 방법 |
| CN108327781A (zh) * | 2017-01-18 | 2018-07-27 | 株式会社捷太格特 | 电动转向式转向操纵装置 |
| CN108327781B (zh) * | 2017-01-18 | 2022-01-04 | 株式会社捷太格特 | 电动转向式转向操纵装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4857991B2 (ja) | 2012-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5971426B2 (ja) | 電動パワーステアリング装置 | |
| EP1882623B1 (en) | Electric Power steering apparatus | |
| US20070284180A1 (en) | Electric power steering apparatus | |
| JP5098341B2 (ja) | 電動パワーステアリング装置 | |
| US8272474B2 (en) | Electric power steering system | |
| US20080217099A1 (en) | Electric Power Steering Apparatus, Control Method Thereof and Program for Electric Power Steering Apparatus | |
| JP2008213643A (ja) | 電動パワーステアリング装置 | |
| JP5050421B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2008049914A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2008290664A (ja) | 電動パワーステアリング装置 | |
| JP2008143200A (ja) | 電動パワーステアリング装置 | |
| JP2009274692A (ja) | 電動パワーステアリング装置 | |
| JP2008230580A (ja) | 電動パワーステアリング装置 | |
| JP7376290B2 (ja) | 操舵制御装置 | |
| JP5011875B2 (ja) | 電動パワーステアリング装置 | |
| JP4978095B2 (ja) | 電動パワーステアリング装置 | |
| JP4857991B2 (ja) | 電動パワーステアリング装置 | |
| JP2008201338A (ja) | 電動パワーステアリング装置 | |
| JP5401801B2 (ja) | 電動パワーステアリング装置 | |
| JP5194740B2 (ja) | 電動パワーステアリング装置 | |
| JP5125216B2 (ja) | 電動パワーステアリング装置 | |
| JP5200460B2 (ja) | モータ駆動制御装置 | |
| JP2008308002A (ja) | 電動パワーステアリング装置 | |
| JP5233083B2 (ja) | 電動パワーステアリング装置 | |
| JP2015071345A (ja) | 電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20090130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090513 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20101022 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101022 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110930 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111004 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111017 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4857991 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141111 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |