JP2008106912A - タイミングベルトの張力調整装置 - Google Patents
タイミングベルトの張力調整装置 Download PDFInfo
- Publication number
- JP2008106912A JP2008106912A JP2006292673A JP2006292673A JP2008106912A JP 2008106912 A JP2008106912 A JP 2008106912A JP 2006292673 A JP2006292673 A JP 2006292673A JP 2006292673 A JP2006292673 A JP 2006292673A JP 2008106912 A JP2008106912 A JP 2008106912A
- Authority
- JP
- Japan
- Prior art keywords
- timing belt
- tension
- tension adjusting
- engine
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Landscapes
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
Abstract
【課題】タイミングベルトが機関と共振することを防止するタイミングベルトの張力調整装置であって、タイミングベルトの高張力化を抑制してタイミングベルトの寿命向上および騒音低減を図る、或いは、アイドラプーリ数の低減またはアイドラプーリを不要にできるタイミングベルトの張力調整装置を提供する。
【解決手段】タイミングベルトが掛け渡されるプーリ10と、プーリ10の回転中心位置を移動させてベルト張力を調整するハウジング20(張力調整手段を構成する回転体)およびベーン体30(張力調整手段を構成する車両側部材)と、ハウジング20の回転作動を制御することにより、タイミングベルトがエンジンと共振するときの共振振動数を変化させるECU53と、を備える。そして、ECU53は、共振振動数がエンジンの振動数と一致しないように、エンジン回転数に基づきハウジング20の回転作動を制御する。
【選択図】図1
【解決手段】タイミングベルトが掛け渡されるプーリ10と、プーリ10の回転中心位置を移動させてベルト張力を調整するハウジング20(張力調整手段を構成する回転体)およびベーン体30(張力調整手段を構成する車両側部材)と、ハウジング20の回転作動を制御することにより、タイミングベルトがエンジンと共振するときの共振振動数を変化させるECU53と、を備える。そして、ECU53は、共振振動数がエンジンの振動数と一致しないように、エンジン回転数に基づきハウジング20の回転作動を制御する。
【選択図】図1
Description
本発明は、タイミングベルト(以下、単にベルトと呼ぶ場合もある)の張力調整装置に関する。
従来より、エンジン(内燃機関)の出力軸の回転力を伝達するタイミングベルトに関し、ベルトが掛け渡されるプーリの軸心位置がエンジン本体の熱膨張により変化したり、ベルトが経年変化により伸びたりすることに起因して、ベルトの張力が低下して所定の張力を確保できなくなるという問題が知られている。
この張力低下の問題に対し、特許文献1ではベルトの張力を一定に保つための張力調整装置が開示されている。図9は特許文献1記載の張力調整装置を示す図であり、この装置は、偏心プーリ90およびばね91を備え、ばね91の付勢力により偏心プーリ90をベルト4に押し付けてベルト4の張力を一定に保つようにしている。
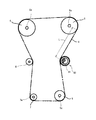
ここで、振動するエンジンに対してタイミングベルトが共振してしまうと、ベルトが大きな振幅で揺れ動いてしまい、その結果、ベルトの寿命低下および騒音発生を招く。なお、ベルトがエンジンと共振するときの共振振動数は、ベルトの張力および弦長(図9中の符号L参照)等に起因して決定される。また、エンジンの振動数は、エンジン回転数が高くなるほど上昇する。
しかしながら、上記張力調整装置では、ベルトの張力を一定に保つことはできるものの、ベルトの張力をエンジン回転数に応じて変化させることはできないため、全てのエンジン回転数に対して上記共振の問題の解決を図るためには、共振振動数をエンジン回転数の上限以上となる高い値に設定しなければならない。
すると、共振振動数はベルトの張力が高いほど高い値となるため、ベルトの張力を極めて高い値で一定に保つように設定しなければならなくなる。その結果、ベルトの高張力化によるベルト寿命低下を招いてしまう。
或いは、共振振動数はベルトの弦長Lが短いほど高い値となるため、図示しないアイドラプーリをベルトに掛け渡して弦長Lを短くしなければならなくなる。その結果、アイドラプーリが必要となる。
或いは、共振振動数はベルトの弦長Lが短いほど高い値となるため、図示しないアイドラプーリをベルトに掛け渡して弦長Lを短くしなければならなくなる。その結果、アイドラプーリが必要となる。
そこで、本発明の目的は、タイミングベルトが機関と共振することを防止するタイミングベルトの張力調整装置であって、タイミングベルトの高張力化を抑制してタイミングベルトの寿命向上および騒音低減を図る、或いは、アイドラプーリ数の低減またはアイドラプーリを不要にできるタイミングベルトの張力調整装置を提供することにある。
請求項1記載の発明では、タイミングベルトが掛け渡されるプーリと、プーリの回転中心位置を移動させてベルト張力を調整する張力調整手段と、張力調整手段の作動を制御することにより、タイミングベルトが機関と共振するときの共振振動数を変化させる電子制御装置と、を備える。そして、電子制御装置は、共振振動数が機関の振動数と一致しないように、機関出力軸の回転数に基づき張力調整手段の作動を制御する。
これによれば、機関出力軸の回転数に応じてタイミングベルトの張力を制御できるので、機関出力軸の回転数がその上限値に近い回転数となった場合には、タイミングベルトの張力を低下させることにより共振振動数が機関の振動数と一致しないようにすることができる。従って、機関出力軸の回転数の上限より低い値の範囲内で共振振動数が変化するようにタイミングベルトの張力を制御しつつ、タイミングベルトが機関と共振してしまうことを防止できる。すなわち、タイミングベルトの高張力化を抑制してタイミングベルトの寿命向上および騒音低減を図りつつ前記共振を防止できる。或いは、アイドラプーリの数を低減又は不要にしつつ前記共振を防止できる。
これによれば、機関出力軸の回転数に応じてタイミングベルトの張力を制御できるので、機関出力軸の回転数がその上限値に近い回転数となった場合には、タイミングベルトの張力を低下させることにより共振振動数が機関の振動数と一致しないようにすることができる。従って、機関出力軸の回転数の上限より低い値の範囲内で共振振動数が変化するようにタイミングベルトの張力を制御しつつ、タイミングベルトが機関と共振してしまうことを防止できる。すなわち、タイミングベルトの高張力化を抑制してタイミングベルトの寿命向上および騒音低減を図りつつ前記共振を防止できる。或いは、アイドラプーリの数を低減又は不要にしつつ前記共振を防止できる。
請求項2記載の発明では、電子制御手段は、車両側部材に対する回転体の回転位置を制御することにより、プーリの回転中心からタイミングベルトまでのオフセット距離を制御する。このように、回転体の回転位置を制御することによりオフセット距離を制御すれば、ベルト張力の調整を行うための張力調整手段の構造を簡素にできる。
請求項4記載の発明では、車両側部材および回転体の一方はハウジングを構成し、他方は、ハウジングとの間に進角室および遅角室を形成するベーン体を構成し、電子制御手段は、進角室および遅角室の作動油圧を制御し、回転体は作動油圧を駆動力として回転する。
そのため、次に説明する油圧ダンパ効果が奏される。すなわち、プーリがタイミングベルトから受ける力が急激に変化した場合であっても、進角室および遅角室の作動油圧により回転体の回転が緩衝されるので、プーリの回転中心位置が急激に動いてしまうことを抑制できる。
そのため、次に説明する油圧ダンパ効果が奏される。すなわち、プーリがタイミングベルトから受ける力が急激に変化した場合であっても、進角室および遅角室の作動油圧により回転体の回転が緩衝されるので、プーリの回転中心位置が急激に動いてしまうことを抑制できる。
以下、本発明の複数の実施形態を図面に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
(第1実施形態)
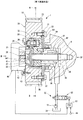
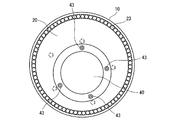
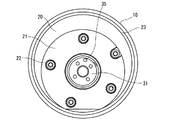
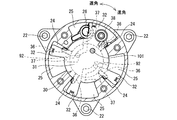
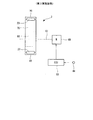
本発明の第1実施形態に係る張力調整装置1を図1〜図4に示す。図1は張力調整装置1の断面図、図2は図1のII−II断面図、図3は図1のIII矢視図、図4は図1のIV矢視図である。なお、張力調整装置1により張力調整されるタイミングベルト4は、従来と同様の構造であるため、図9を援用して以下に説明する。
(第1実施形態)
本発明の第1実施形態に係る張力調整装置1を図1〜図4に示す。図1は張力調整装置1の断面図、図2は図1のII−II断面図、図3は図1のIII矢視図、図4は図1のIV矢視図である。なお、張力調整装置1により張力調整されるタイミングベルト4は、従来と同様の構造であるため、図9を援用して以下に説明する。
図9に示すように、タイミングベルト4(以下、単にベルトと呼ぶ場合もある)は、各種プーリ5、6、7、8、10に掛け渡されている。プーリ5は、エンジン(内燃機関)のクランクシャフト(出力軸)5aに取り付けられており、クランクシャフト5aとともに回転する。また、プーリ6はカム軸6aとともに回転し、プーリ7は、オイルポンプ等の補機の回転軸とともに回転する。そして、クランクシャフト5aの回転力はベルト4によりカム軸、補機等に伝達される。
プーリ8は、ベルト4の弦長を短くしてベルト4がエンジンと共振することを防止するためのアイドラプーリである。また、プーリ10は、張力調整装置1の一構成部品である。
プーリ8は、ベルト4の弦長を短くしてベルト4がエンジンと共振することを防止するためのアイドラプーリである。また、プーリ10は、張力調整装置1の一構成部品である。
図1に示すように、張力調整装置1は、前述のプーリ10、回転体としてのハウジング20、車両側部材としてのベーン体30、オフセット距離検出手段としてのセンサ40、油圧供給ユニット50等から構成されている。また、張力調整装置1は、エンジンのシリンダブロック9或いはシリンダヘッドに取り付けられている。
そして、ハウジング20およびベーン体30は、プーリ10の回転中心位置を移動させてベルト4の張力を調整する張力調整手段として機能する。
そして、ハウジング20およびベーン体30は、プーリ10の回転中心位置を移動させてベルト4の張力を調整する張力調整手段として機能する。
ハウジング20は円筒形状であり、内部にベーン体30を収容している。そして、ハウジング20にはプレート21がボルト22で固定されており、プレート21は、ベーン体30がハウジング20から抜け出ないように機能する(図1および図4参照)。また、ハウジング20の外周面には、例えばボールベアリング等の軸受23を介してプーリ10が回転可能に取り付けられている。
ベーン体30は、ボス部31と複数のベーン32とを有している。ボス部31にはブッシュ33が嵌合しており、ボス部31は、ブッシュ33を介してボルト34によりシリンダブロック9に固定されている。また、シリンダブロック9に対するベーン体30の回転方向の位置決めは、シリンダブロック9およびベーン体30に位置決めピン35を嵌合することにより成される。
図2に示すように、ベーン32とハウジング20との間には、遅角室24および進角室25が形成されている。そして、遅角室24および進角室25に油圧供給ユニット50からの作動油が供給されることにより、ハウジング20はベーン体30に対して回転する。図2に示す遅角方向および進角方向を表す矢印は、ベーン体30に対するハウジング20の遅角方向、進角方向を表している。
ハウジング20の回転中心は、ベーン体30の軸心と一致しているもののハウジング20の軸心とはずれている。そして、ハウジング20の軸心はプーリ10の回転中心と一致している。従って、プーリ10の回転中心とハウジング20の回転中心とは偏心している。
ここで、プーリ10の回転中心からタイミングベルト4とプーリ10との係合部分までの距離を「オフセット距離」と規定すると、上述の偏心構造によれば、作動油によりハウジング20が回転すると、オフセット距離が変化し、その結果ベルト4の張力が変化する。従って、遅角室24および進角室25の作動油の圧力を調整すれば、ベルト4の張力を調整することができる。
具体的には、遅角室24に作動油を供給して最遅角位置(図2の実線に示す位置)にハウジング20を回転させると、ベルト4の張力が最も低くなるように調整される。一方、進角室25に作動油を供給して最進角位置にハウジング20を回転させると、プーリ10は図2中の二点鎖線に示す位置に移動して、ベルト4の張力が最も高くなるように調整される。
また、ベーン32には、ストッパピストン38が収容されている。ストッパピストン38は、圧縮コイルばね381の復原力により、図1に示すようにハウジング20の嵌合リング26に嵌合することで、ハウジング20をベーン体30に対して回転不能に拘束する。一方、ストッパピストン38は、通路39を通じて遅角室24から供給される油圧による力と、通路391を通じて進角室25から供給される油圧による力との少なくとも一方により、嵌合リング26からの離脱位置に変位することで、ハウジング20の回転を許容する。
センサ40は、ハウジング20の回転位置を検出するものであり、ボルト34に圧入固定された被検出体41と、ハウジング20にボルト43で固定されたセンサ本体42とを備えて構成されている。よって、ハウジング20が回転すると、センサ本体42が被検出体41に対して相対的に回転する。そして、センサ本体42は、被検出体41に対する自身の相対回転角度(ハウジング20の回転位置)を検出し、検出信号をECU53に出力する。
因みに、本実施形態ではセンサ40にロータリーエンコーダを採用している。
因みに、本実施形態ではセンサ40にロータリーエンコーダを採用している。
油圧供給ユニット50は、油圧ポンプ51、進遅角切替弁としての電磁スプール弁52、および電子制御装置としてのECU53を備えて構成されている。本実施形態に係る油圧ポンプ51は、タイミングベルト4から伝達されるエンジンの回転力を駆動源として作動するが、電動モータを駆動源として作動させてもよい。そして、油圧ポンプ51の駆動により吐出する作動油の供給先は、電磁スプール弁52により切り替えられる。
図1に示す電磁スプール弁52の作動位置では、油圧ポンプ51から吐出する作動油は、シリンダブロック9に形成された遅角油路91、およびベーン体30に形成された遅角油路36を順に流通した後、遅角室24に流入する。また、進角室25の作動油は、ベーン体30に形成された進角油路37、ボス部31とボルト34との間に形成された進角油路341、およびシリンダブロック9に形成された進角油路92を順に流通した後、電磁スプール弁52を通じてオイルパン54に排出される。
一方、電磁スプール弁52の作動位置を切り換えて、遅角室24から作動油を排出するとともに進角室25に作動油を供給する場合には、油圧ポンプ51から吐出する作動油は、進角油路92、進角油路341および進角油路37を順に流通した後、進角室25に流入する。また、遅角室24の作動油は、遅角油路36および遅角油路91を順に流通した後、電磁スプール弁52を通じてオイルパン54に排出される。
なお、電磁スプール弁52の作動位置を切り換えて、遅角油路91および進角油路92の流通を電磁スプール弁52側で遮断させることも可能である。
なお、電磁スプール弁52の作動位置を切り換えて、遅角油路91および進角油路92の流通を電磁スプール弁52側で遮断させることも可能である。
ECU23は、電磁スプール弁52の作動をデューティ比制御することにより、遅角室24および進角室25の作動油の圧力を制御して、ハウジング20の回転位置を制御する。これにより、オフセット距離が調整されてベルト4の張力が調整される。また、ECU23には、エンジン回転数検出手段としてのクランク角度サンサ44から出力された、エンジン回転数の信号が入力される。
そして、ECU23は、ベルト4の張力を調整するにあたり、クランク角度サンサ44から出力されたエンジン回転数信号と、センサ40から出力されたハウジング20の回転位置信号とに基づいてハウジング20の回転位置を制御する。この制御は、振動するエンジンに対してベルト4が共振してしまわないように実行される。
次に、ECU23による前記制御の内容を説明する。
振動するエンジンとベルト4とが共振するときの振動数である共振振動数Fは、図9に示す弦長Lに比例して大きくなり、かつ、ベルト4の張力Tの1/2乗に比例して大きくなることが各種試験により明らかになっている。そして、弦長Lは一定であるため、張力Tを大きくすれば共振振動数Fは大きくなり、張力Tを小さくすれば共振振動数Fは小さくなる。
振動するエンジンとベルト4とが共振するときの振動数である共振振動数Fは、図9に示す弦長Lに比例して大きくなり、かつ、ベルト4の張力Tの1/2乗に比例して大きくなることが各種試験により明らかになっている。そして、弦長Lは一定であるため、張力Tを大きくすれば共振振動数Fは大きくなり、張力Tを小さくすれば共振振動数Fは小さくなる。
従って、ECU23は、エンジン回転数に応じて変化するエンジンの振動数が共振振動数Fと一致しないように、ハウジング20の回転位置を制御して張力Tを調整している。より具体的に説明すると、エンジン回転数が0〜10000rpmの範囲であるエンジンを対象とした場合において、エンジンの振動数はエンジン回転数と同一であると仮定すると、エンジンの振動数は0〜10000Hzの範囲で変化する。この場合、共振振動数Fがエンジン振動数の最大値10000Hz以下の値、かつ、所定の下限値以上の範囲で変化するように、ECU23は張力Tを調整する。なお、前記下限値は、クランクシャフト5aの回転力をカム軸6a等に伝達するのに必要な最低限の大きさに張力Tが調整されているときの共振振動数Fの値である。
また、ECU23は、センサ40から出力されたハウジング20の回転位置信号に基づき、実際の張力Tを算出する。そして、ECU23には、張力Tの値と共振振動数Fの値との対応関係がマップとして予め記憶されており、算出した実際の張力Tに基づき共振振動数Fを算出する。そして、エンジン回転数の変化にともない、クランク角度サンサ44からの出力信号により得られたエンジン回転数が算出した共振振動数Fに近づいてくると、共振振動数Fがエンジン回転数と一致しない値となるように、ECU23は張力Tを調整する。
これにより、例えば、共振振動数Fが3000Hzとなるように張力Tが調整されている場合に、エンジン回転数が3000rpm付近まで上昇してきた場合には、共振振動数Fが4000Hzとなるように張力Tは調整される。その後、さらにエンジン回転数が4000rpm付近まで上昇してきた場合には、共振振動数Fが3000Hzとなるように張力Tは調整される。つまり、ECU23の制御により、張力Tはエンジン回転数に応じて連続的に調整される。
なお、エンジン始動時においては、油圧ポンプ51による作動油の圧力が十分に上昇していないため、ストッパピストン38が嵌合リング26に嵌合している。そのため、ハウジング20は最遅角位置或いは最進角位置に固定されるので、張力Tは最低値或いは最高値に調整されることとなる。
以上により、上記構成による本実施形態によれば、エンジン回転数に応じてタイミングベルト4の張力Tを制御できるので、エンジン回転数がその上限値(例えば10000rpm)に近い回転数となった場合には、張力Tを低下させることにより共振振動数Fがエンジンの振動数と一致しないようにすることができる。従って、エンジン回転数の上限より低い値の範囲内で共振振動数Fが変化するように張力Tを制御しつつ、ベルト4がエンジンと共振してしまうことを防止できる。すなわち、ベルト4の高張力化を抑制してベルト4の寿命向上および騒音低減を図りつつ前記共振を防止できる。
また、本実施形態によれば、共振を回避しながらベルト4の張力Tを調整して最低限の張力Tを確保することができるので、弦長Lを短くするためのアイドラプーリの数を低減又は不要にできる。よって、エンジンの設計自由度が大きく向上する。
また、本実施形態によれば、上述の如くベルト4の張力Tを必要最低限にしつつ共振を防止できるので、ベルト4と各種プーリ5、6、7、8とのフリクショントルクを低減できる。よって、エンジンの燃費を向上できる。
また、本実施形態によれば、プーリ10がベルト4から受ける力が急激に変化した場合であっても、遅角室24および進角室25の作動油圧によりハウジング20の回転が緩衝されるので、プーリ10の回転中心位置が急激に動いてしまうことを抑制できる。
(第2実施形態)
次に、本発明の第2実施形態に係る張力調整装置2を以下に説明する。
上記第1実施形態に係る張力調整装置1では、プーリ10をハウジング20に取り付けているのに対し、本第2実施形態に係る張力調整装置2では、プーリ100をベーン体300に取り付けている。
次に、本発明の第2実施形態に係る張力調整装置2を以下に説明する。
上記第1実施形態に係る張力調整装置1では、プーリ10をハウジング20に取り付けているのに対し、本第2実施形態に係る張力調整装置2では、プーリ100をベーン体300に取り付けている。
図5(b)は張力調整装置2の断面図、図5(a)は(b)のa矢視図である。また、図6および図7は、図5(b)のVI−VI断面図である。
これらの図5〜図7に示すように、張力調整装置2は、タイミングベルト4が掛け渡されたプーリ100、車両側部材としてのハウジング200、回転体としてのベーン体300、オフセット距離検出手段としてのセンサ400、第1実施形態と同様の油圧供給ユニット50等から構成されている。
これらの図5〜図7に示すように、張力調整装置2は、タイミングベルト4が掛け渡されたプーリ100、車両側部材としてのハウジング200、回転体としてのベーン体300、オフセット距離検出手段としてのセンサ400、第1実施形態と同様の油圧供給ユニット50等から構成されている。
ハウジング200およびベーン体300の構造は、第1実施形態のハウジング20およびベーン体30の構造と略同一であり、第1実施形態と実質的に同一の部材には、図中、同一符号を付して説明を援用する。
プーリ100を回転可能に支持する支持部材としてのボルト101は、ベーン体300に取り付けられている。ベーン体300は、ハウジング200内部にて回転可能に収容されている。ハウジング200は、ボルト22によりシリンダブロック9に固定されている。なお、プレート21はハウジング200の両側に配置され、ボルト201により固定されている。
プーリ100を回転可能に支持する支持部材としてのボルト101は、ベーン体300に取り付けられている。ベーン体300は、ハウジング200内部にて回転可能に収容されている。ハウジング200は、ボルト22によりシリンダブロック9に固定されている。なお、プレート21はハウジング200の両側に配置され、ボルト201により固定されている。
ボルト101のベーン体300への取り付け位置は、ベーン体300の回転中心からずれている。従って、プーリ100の回転中心は、ベーン体300の回転中心とは偏心している。そして、上述の偏心構造によれば、作動油によりベーン体300が回転すると、オフセット距離が変化し、その結果ベルト4の張力が変化する。従って、遅角室24および進角室25の作動油の圧力を調整すれば、ベルト4の張力を調整することができる。
具体的には、進角室25に作動油を供給して最進角位置(図6に示す位置)にベーン体300を回転させると、ベルト4の張力が最も低くなるように調整される。一方、遅角室24に作動油を供給して最遅角位置(図7に示す位置)にベーン体300を回転させると、プーリ100は図2中の二点鎖線に示す位置に移動して、ベルト4の張力が最も高くなるように調整される。
センサ400は、ベーン体300の回転位置を検出するものであり、ベーン体300に取り付けられてベーン体300とともに回転する被検出体401と、ハウジング200のプレート21にボルト201で固定されたセンサ本体402と、センサ本体402にスライド移動可能に取り付けられたスライド体403と、を備えて構成されている。よって、ベーン体300の回転とともに被検出体401が回転すると、スライド体403がスライド移動する。そして、センサ本体402は、スライド体403のスライド移動量(ベーン体300の回転位置)を検出し、検出信号をECU53に出力する。
ベーン体300を最遅角位置(図7参照)に回転させる際には、油圧ポンプ51から吐出する作動油は、遅角油路91、およびプレート21に形成された遅角油路211を順に流通した後、遅角室24に流入する。また、進角室25の作動油は、進角油路37および進角油路92を順に流通した後、オイルパン54に排出される。
一方、ベーン体300を最進角位置(図6参照)に回転させる際には、油圧ポンプ51から吐出する作動油は、進角油路92および進角油路37を順に流通した後、進角室25に流入する。また、遅角室24の作動油は、遅角油路211および遅角油路91を順に流通した後、オイルパン54に排出される。
なお、電磁スプール弁52の作動位置を切り換えて、遅角油路91および進角油路92の流通を電磁スプール弁52側で遮断させることも可能である。
なお、電磁スプール弁52の作動位置を切り換えて、遅角油路91および進角油路92の流通を電磁スプール弁52側で遮断させることも可能である。
ECU23は、電磁スプール弁52の作動をデューティ比制御することにより、遅角室24および進角室25の作動油の圧力を制御して、ベーン体300の回転位置を制御する。これにより、オフセット距離が調整されてベルト4の張力が調整される。
そして、ECU23は、ベルト4の張力を調整するにあたり、クランク角度サンサ44から出力されたエンジン回転数信号と、センサ400から出力されたベーン体300の回転位置信号とに基づいてベーン体300の回転位置を制御する。この制御は、振動するエンジンに対してベルト4が共振してしまわないように、第1実施形態と同様の内容で実行される。
以上により、本第2実施形態に係る張力調整装置2は、第1実施形態に係る張力調整装置1と同様の効果が奏される。
そして、ECU23は、ベルト4の張力を調整するにあたり、クランク角度サンサ44から出力されたエンジン回転数信号と、センサ400から出力されたベーン体300の回転位置信号とに基づいてベーン体300の回転位置を制御する。この制御は、振動するエンジンに対してベルト4が共振してしまわないように、第1実施形態と同様の内容で実行される。
以上により、本第2実施形態に係る張力調整装置2は、第1実施形態に係る張力調整装置1と同様の効果が奏される。
(第3実施形態)
次に、本発明の第3実施形態に係る張力調整装置3を以下に説明する。
上記第1および第2実施形態に係る張力調整装置1、2では、作動油圧を駆動力として回転体20、300を回転作動させているのに対し、本第3実施形態に係る張力調整装置3では、油圧供給ユニット50を廃止して、電動モータ60を駆動力として回転作動させている。
次に、本発明の第3実施形態に係る張力調整装置3を以下に説明する。
上記第1および第2実施形態に係る張力調整装置1、2では、作動油圧を駆動力として回転体20、300を回転作動させているのに対し、本第3実施形態に係る張力調整装置3では、油圧供給ユニット50を廃止して、電動モータ60を駆動力として回転作動させている。
図8を用いてより具体的に説明すると、張力調整装置3は、プーリ10、電動モータ60、回転体としてのハウジング70、車両側部材としてのギヤ80およびECU53等から構成されている。
ギヤ80は、シリンダブロック9に回転可能に取り付けられるとともに、電動モータ60の出力軸61に接続されて出力軸61とともに回転する。ハウジング70の内部にはギヤ80が収容されており、ギヤ80が回転するとハウジング70が回転する。また、ハウジング70の外周面には、例えばボールベアリング等の軸受23を介してプーリ10が回転可能に取り付けられている。
ギヤ80は、シリンダブロック9に回転可能に取り付けられるとともに、電動モータ60の出力軸61に接続されて出力軸61とともに回転する。ハウジング70の内部にはギヤ80が収容されており、ギヤ80が回転するとハウジング70が回転する。また、ハウジング70の外周面には、例えばボールベアリング等の軸受23を介してプーリ10が回転可能に取り付けられている。
ハウジング70の回転中心は、ギヤ80および出力軸61の軸心と一致しているもののハウジング70の軸心とはずれている。そして、ハウジング70の軸心はプーリ10の回転中心と一致している。従って、プーリ10の回転中心とハウジング70の回転中心とは偏心している。そして、上述の偏心構造によれば、電動モータ60によりギヤ80が回転してハウジング70が回転すると、オフセット距離が変化し、その結果ベルト4の張力が変化する。従って、ECU53により電動モータ60の作動を制御すれば、ベルト4の張力を調整することができる。
以上により、本第3実施形態に係る張力調整装置3は、第1および第2実施形態に係る張力調整装置1、2と同様の効果が奏される。
以上により、本第3実施形態に係る張力調整装置3は、第1および第2実施形態に係る張力調整装置1、2と同様の効果が奏される。
(他の実施形態)
上記第1および第2実施形態に係る張力調整装置1、2では、ベーン体30、300は4つのベーン32を有しているが、ベーン32の数は3つでも2つでも1つでもよい。因みに、ベーン32の数が少ないほど、回転体20、300の回転可能範囲を大きくできるので、張力Tの調整範囲も広くできる。
このように、本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
上記第1および第2実施形態に係る張力調整装置1、2では、ベーン体30、300は4つのベーン32を有しているが、ベーン32の数は3つでも2つでも1つでもよい。因みに、ベーン32の数が少ないほど、回転体20、300の回転可能範囲を大きくできるので、張力Tの調整範囲も広くできる。
このように、本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
1、2、3:張力調整装置、4:タイミングベルト、5a:クランクシャフト、9:シリンダブロック、10:プーリ、20:ハウジング(張力調整手段を構成する回転体)、30:ベーン体(張力調整手段を構成する車両側部材)、40:センサ、50:油圧供給ユニット、53:ECU(電子制御装置)、60:電動モータ、70:ハウジング(回転体)、80:ギヤ(車両側部材)、100:プーリ、200:ハウジング(車両側部材)、300:ベーン体(回転体)、400:センサ、L:弦長、T:張力。
Claims (5)
- 機関の出力軸の回転力を伝達するタイミングベルトが掛け渡されるプーリと、
前記プーリの回転中心位置を移動させてベルト張力を調整する張力調整手段と、
前記張力調整手段の作動を制御することにより、前記タイミングベルトが前記機関と共振するときの共振振動数を変化させる電子制御装置と、
を備え、
前記電子制御装置は、前記共振振動数が前記機関の振動数と一致しないように、前記機関出力軸の回転数に基づき前記張力調整手段の作動を制御することを特徴とするタイミングベルトの張力調整装置。 - 前記張力調整手段は、車両側に固定された車両側部材と、前記車両側部材に回転可能に支持される回転体とを有して構成され、
前記プーリは、前記回転体のうち前記回転体の回転中心から偏心した位置に回転可能に支持され、
前記電子制御手段は、前記車両側部材に対する前記回転体の回転位置を制御することにより、前記プーリの回転中心から前記タイミングベルトまでのオフセット距離を制御する請求項1記載のタイミングベルトの張力調整装置。 - 前記オフセット距離を検出するセンサを備え、
前記電子制御手段は、前記センサにより検出されたオフセット距離に基づき、前記共振振動数が前記機関の振動数と一致しないように前記回転体の回転位置を制御する請求項2記載のタイミングベルトの張力調整装置。 - 前記車両側部材および前記回転体の一方は、円筒形状のハウジングを構成し、
前記車両側部材および前記回転体の他方は、前記ハウジング内部に収容され、前記ハウジングとの間に進角室および遅角室を形成するベーン体を構成し、
前記電子制御手段は、前記進角室および前記遅角室の作動油圧を制御し、
前記回転体は前記作動油圧を駆動力として回転する請求項2または3記載のタイミングベルトの張力調整装置。 - 前記電子制御手段により駆動制御される電動モータを備え、
前記張力調整手段は前記電動モータを駆動力として作動する請求項1から3のいずれか一項記載のタイミングベルトの張力調整装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006292673A JP2008106912A (ja) | 2006-10-27 | 2006-10-27 | タイミングベルトの張力調整装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006292673A JP2008106912A (ja) | 2006-10-27 | 2006-10-27 | タイミングベルトの張力調整装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008106912A true JP2008106912A (ja) | 2008-05-08 |
Family
ID=39440420
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006292673A Withdrawn JP2008106912A (ja) | 2006-10-27 | 2006-10-27 | タイミングベルトの張力調整装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008106912A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009017499A1 (de) | 2008-04-16 | 2009-11-12 | Toshiba Kikai K.K. | Folienbahnformwerkzeug und Folienbahnformverfahren |
| JP2017206982A (ja) * | 2016-05-17 | 2017-11-24 | 株式会社Subaru | 制御装置 |
-
2006
- 2006-10-27 JP JP2006292673A patent/JP2008106912A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009017499A1 (de) | 2008-04-16 | 2009-11-12 | Toshiba Kikai K.K. | Folienbahnformwerkzeug und Folienbahnformverfahren |
| JP2017206982A (ja) * | 2016-05-17 | 2017-11-24 | 株式会社Subaru | 制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4296718B2 (ja) | バルブタイミング調整装置 | |
| JP5720857B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| JP3488585B2 (ja) | 内燃機関の動弁装置 | |
| JP3933129B2 (ja) | フライホイール装置 | |
| CN1696475A (zh) | 凸轮轴调整器 | |
| JP2010151088A (ja) | 内燃機関の可変圧縮比装置 | |
| JP2005002992A (ja) | 位相器 | |
| JP2010071362A (ja) | チェーンテンショナ、並びに同チェーンテンショナを具備するチェーンの張力制御装置 | |
| US10006535B2 (en) | Driving force transmission system for engine | |
| WO2012056874A1 (ja) | 弁開閉時期制御装置 | |
| JP2004232628A (ja) | 可変カムタイミング(vct)システム | |
| JP4066967B2 (ja) | 内燃機関のバルブ特性変更装置 | |
| JP2008106912A (ja) | タイミングベルトの張力調整装置 | |
| JP2005069204A (ja) | 可変圧縮比機構付き内燃機関 | |
| KR20070026527A (ko) | 내연기관용 벨트 구동부 | |
| JP2004156603A (ja) | ロック装置 | |
| JP4349208B2 (ja) | 可変圧縮比内燃機関 | |
| JP4379273B2 (ja) | 可変圧縮比機構を備えた内燃機関 | |
| JP5119180B2 (ja) | 内燃機関の可変動弁装置 | |
| JP4464844B2 (ja) | 内燃機関の油圧駆動装置 | |
| JP2007263038A (ja) | バルブタイミング調整装置 | |
| KR100435960B1 (ko) | 마그네틱 클러치가 형성된 밸런스 샤프트 | |
| KR0163690B1 (ko) | 관성 가변형 크랭크샤프트 | |
| JP2008202549A (ja) | 内燃機関の可変動弁装置 | |
| JP5652013B2 (ja) | 内燃機関の可変動弁装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081226 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20091224 |