JP2008246151A - 電気掃除機 - Google Patents
電気掃除機 Download PDFInfo
- Publication number
- JP2008246151A JP2008246151A JP2007095028A JP2007095028A JP2008246151A JP 2008246151 A JP2008246151 A JP 2008246151A JP 2007095028 A JP2007095028 A JP 2007095028A JP 2007095028 A JP2007095028 A JP 2007095028A JP 2008246151 A JP2008246151 A JP 2008246151A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- vacuum cleaner
- main body
- control unit
- suction port
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Electric Vacuum Cleaner (AREA)
Abstract
【課題】 掃除機本体から吸込口体や連通管等に設けた手元回路部へ供給される電源の電圧波形を用いて信号を送信するものでは、交流電源の周波数の変更や電圧の変動があった場合には電圧波形が影響を受けるため、正確に信号を読み取れないという課題があった。
【解決手段】 掃除機本体は交流電源の周波数あるいは電圧を検出するとともに電圧波形を指示信号として手元回路部に出力する本体制御部を有し、この本体制御部は検出した周波数あるいは電圧に応じて電圧波形を調整したのち指示信号として出力する。
【選択図】 図6
Description
本発明は、吸込口体あるいは連通管に、掃除機本体から電源が供給される動作部とその動作部を制御する制御部を備えた電気掃除機に関する。
従来の電気掃除機として、例えば特許文献1に記載された電気掃除機が知られている。この電気掃除機は、例えばホースに、このホース内の2本の配線を介して掃除機本体から電源が供給される手元回路部が設けられている。手元回路部は、表示や報知などの出力を行う出力手段を備えている。一方、掃除機本体には、ゴミ量検出手段とこのゴミ量検出手段が検出したゴミ量に応じた本体情報を配線に出力する信号送信手段とが設けられている。
そして、ゴミ量に応じて電源電圧を制御することによって本体情報を手元回路部に送信する。手元回路部は制御された電源電圧を検出して、その検出結果を出力手段に出力し、出力手段は本体情報を表示あるいは報知する。この電気掃除機によれば、ホースの配線を増やすことなく手元回路部への電源供給と信号の送信とを行うことができる。
特開2001−104226号公報
上記特許文献1には、掃除機本体から手元回路部へ供給される電源の電圧波形を用いて信号を送信するという技術思想は開示されているものの、これを実現する具体的構成は開示されていない。本出願の発明者が商用交流電源の電圧波形を信号として利用することについて検討を重ねたところ、交流電源の周波数の変更や電圧変動があった場合には、電圧波形に大きな影響を与えることが判明した。したがって、この電圧波形を用いて送信される指示信号を手元回路部で正確に読取れないという課題が生じ、交流電源の電圧波形を信号として用いる場合には信号伝達の信頼性が損なわれてしまう。
そこで、本発明は上記課題を解決するもので、簡単な構成で交流電源の電圧波形を信号として利用することができ、しかも確実に信号伝達が行える電気掃除機を得ることを目的とする。
上記課題を解決するために本発明は、電動送風機を備えた掃除機本体に接続される電力線が配設された連通管と、この連通管に接続され前記電動送風機の動作により塵埃を吸込む吸込口体とを有し、吸込口体あるいは連通管には前記電力線と接続されて前記掃除機本体から電圧が供給される電源部、前記電源部により動作する動作部とを備えた電気掃除機において、前記掃除機本体には交流電源の周波数あるいは電圧を検出するとともに前記電源部に供給される電圧波形を指示信号として出力する本体制御部とを備え、前記吸込口体あるいは連通管には前記本体制御部からの指示信号に基づいて前記動作部を制御する制御部とを備え、前記本体制御部は検出した前記周波数あるいは電圧に応じて前記電圧波形を調整したのち前記指示信号として出力することを特徴とするものである。
本発明によれば、掃除機本体から供給される電圧波形を利用して吸込口体あるいは連通管に制御信号を送ることができ、制御信号が交流電源の周波数の変更や電圧の変動による影響を小さくすることで信号伝達の信頼性を高めることができる。
以下、本発明の第一の実施の形態を、図面を参照して説明する。
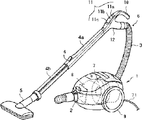
はじめに、図1、図2および図3を用いて、電気掃除機の構成を説明する。電気掃除機は、掃除機本体1と、この掃除機本体1に形成された吸込口2に一端が着脱可能に接続されるホース3と、このホース3の他端に一端が着脱可能に接続される延長管4と、この延長管4の他端に着脱可能に接続される吸込口体5とからなる。ホース3と延長管4とで連通管6が構成される。また、掃除機本体1はコード71から商用交流電源31が供給される。
掃除機本体1は、電動送風機7、吸込口2を介してホース3と連通する集塵部としての集塵袋8を内部に設け、電動送風機7の吸気風が集塵袋8内を通過することでこの集塵袋8で塵埃を分離し集塵するようになっている。さらに、本体1の前側下面には旋回自在な旋回輪(図示せず)を、本体1の後側側面には大径の一対の従動後輪9(一方のみ図示)をそれぞれ設けている。
ホース3は、伸縮自在で湾曲可能な略円筒状からなるもので、ハンドル10と電動送風機7の入力等を設定する操作ボタン11とを備えた手元操作管12(手元操作部)を有している。この操作ボタン11は、電動送風機7、吸込口モータ13をそれぞれ異なる駆動状態にする複数種類の運転モードを選択することができるように構成されている。具体的には、図中に示すように、ホース3から延長管4の方向に向けて、電動送風機7の停止設定用の操作ボタン11a、電動送風機7の強入力/弱入力の運転設定用の操作ボタン11b、吸込口モータ13の正転/反転/停止の運転設定用の操作ボタン11cが一列に順次並んで配設されている。
また、ホース3には交流電源と吸込口体5とを接続するための一対の電力線14が設けられている。さらに、ホース3には、掃除機本体1に設けられた後述する本体制御部と手元操作部12とを接続する一対の信号線15が設けられている。信号線15の1本は電力線14を共用している。そして、これら電力線14と信号線15とは、ホースの3の一端から他端にわたって配設されている。
延長管4は大径管4aとこの大径管4a内に挿入される小径管4bからなり、小径管4bを大径管4aに対してスライドさせることで延長管4全体を伸縮可能にしている。これら大径管4aと小径管4bとには一対の電力線16が設けられ、この電力線16はホース3に設けられた電力線14と接続されている。
次に、吸込口体5の構成について詳述する。吸込口体5は、この延長管4の先端に着脱可能に取り付けられるもので、被掃除面上の塵埃を吸い込む吸込開口5aを設けている。図2は、吸込口体5の構成を掃除面(底面)側から見た様子を示す平面図である。図2に示すように、吸込口体5には動作部としての吸込口モータ13が配設されており、この吸込口モータ13の回転は、動力伝達機構17により回転清掃体18に伝達されるようになっている。吸込口体5の掃除面(底面)側には、吸込口モータ13の安全スイッチとして機能する掃除面スイッチ19が配設されている。なお、吸込口体5内には、吸込口体制御装置60を実装した吸込口回路基板21が組み込まれている。
次に、掃除機本体1に内蔵された本体制御装置30、吸込口体5に内蔵された吸込口制御装置60を含む回路構成を図3に基づいて説明する。31は商用交流電源で、本体制御装置30において、制御信号で駆動される双方向性サイリスタ32、電流ヒューズ33、および電動送風機7の一部を構成し交流電源で駆動される整流子モータ(以下、単にモータという)34が直列に接続されている。
電動送風機7は、主にモータ34とこのモータ34で回転されるファン35とから構成されている。モータ34は、例えば、ブラシ(図示せず)と、このブラシに摺動する整流子を備えた電機子34aと界磁巻線34b,34cとから構成されるユニバーサルモータである。ファン35はモータ34の回転軸に接続された遠心型ファンであり、モータ34によりファン35が回転すると、塵埃を含んだ空気が吸込口体5から延長管4、ホース3を介して掃除機本体1に吸い込まれる。36はゼロクロス検出部で、モータ34に印加する交流電源電圧のゼロクロスポイントを検出する。
また、37はマイクロコンピュータからなる本体制御装置で、そのI/O部38には、手元操作管12に接続された信号線15が接続され、手元操作管12からは指示信号等がI/O部38に入力される。そして、本体制御部37は、商用交流電源31のゼロクロスタイミングから商用交流電源31の周波数の読取り、手元操作管12からの指示信号等の取込みを行うとともに、双方向性サイリスタ32、および電力線14に接続された双方向性サイリスタ39の制御端子に制御信号を出力するようになっている。
また、手元操作管12の各操作ボタン11a〜11cとそれぞれ直列に設けられた抵抗部品12a〜12cは、それぞれ異なる抵抗値となっており、本体電源部40の出力電圧の分圧値を操作ボタン11の操作状態に応じて変化させるための回路構成(電圧可変回路)をなしている。そして、操作ボタン11の操作状態に応じて変動する分圧値を、本体制御部37が周期的に読取る。
本体制御部37は、主に、中央処理部41、メモリ42、前述したI/O部38、およびタイマ43などから構成される。メモリ42は、中央処理部41が実行する制御プログラム、ならびに必要な定数などのデータが予め記憶しており、また、中央処理部41の演算データなどを一時記憶しておくデータ記憶領域ならびに作業領域として使用される。
44は電動送風機7に流れる電流を検出する電流検出部で、この電流検出部44の出力は本体制御部37に入力される。本体制御部37は、電流検出部44の出力に応じて掃除機本体1に設けられた図示しない報知部を動作させる。これにより、集塵袋8の集塵量に関する情報が使用者に知らされる。また70は商用交流電源31の電圧を検出する電圧検出部で、この電圧検出部70で検出した電圧情報が本体制御部37に入力され、本体制御部37において電源電圧を読取る。
次に、吸込口体5に設けられた吸込口制御装置60の構成を説明する。商用交流電源31に、双方向性サイリスタ39を介して電源部としての吸込口電源部48が接続されている。この双方向性サイリスタ39の制御信号の出力タイミングは、前述したように本体制御部37が制御する。吸込口電源部48は、電力線16に接続される整流部48a、降圧部48b、定電圧部48cなどから構成されている。整流部48aは例えば4つのダイオードから構成され、定電圧部48cは例えば電解コンデンサから構成されている。整流部48aの出力側には、トランジスタ等の4つのスイッチング素子49a〜49dから構成されるブリッジ回路49が接続され、さらに、このブリッジ回路49に吸込口モータ13が接続されている。また、吸込口電源部48は、制御部としての吸込口制御部50の電源としても機能する。
吸込口制御部50は、主に、メモリ51、中央処理部52、I/O部(図示せず)、およびタイマ53から構成される。メモリ51は、吸込口モータ13の動作に係る制御プログラム、ならびに必要な定数などのデータが予め記憶されている。この吸込口制御部50には、信号検出部54が接続される。
吸込口制御部50には、信号検出部54から掃除機本体1より吸込口電源部48に供給される電圧波形、換言すれば指示信号、位相情報が入力される。そして吸込口制御部50は、この電圧波形に応じて、ブリッジ回路49の各スイッチング素子49a〜49dへオン、オフの制御信号を出力して、吸込口モータ13の回転速度や回転方向を制御する。例えば、吸込口制御部50が、スイッチング素子49aと49dをオンさせた場合は、掃除面に対して吸込口体5が前方向に進むように回転(正転)し、逆に、スイッチング素子49bと49cをオンさせた場合は、掃除面に対して吸込口体5が後方向に進むように回転(反転)する。
なお、本体制御部37は、コンセントが差し込まれて商用交流電源31から電源が供給されると双方向性サイリスタ39の制御端子に所定のタイミングで制御信号を供給して、吸込口体5の吸込口電源部48に電力を供給する。これにより、吸込口制御部50は電源が供給されて動作可能となる。
このような構成において、手元操作管12の操作ボタン11が操作されると、この操作に基づいた信号が本体制御部37に入力される。電動送風機7を動作させる旨の信号である場合には、本体制御部37から双方向性サイリスタ32の制御端子に制御信号が供給され、電動送風機7が駆動される。本体制御部37は、位相制御により電動送風機7の入力を可変できる。
また、操作ボタン11Cが操作されて、吸込口モータ13を動作させる旨の信号が本体制御部37に入力されると、本体制御部37は双方向性サイリスタ39の制御端子に、例えば図4の(b)に示すように電源電圧のゼロクロスからの制御信号出力タイミングtbで制御信号を出力、すなわち、吸込口電源部48に加える電圧を位相制御する。双方向性サイリスタ39は電源電圧が反転するまで導通するので、吸込口体端子間すなわち電力線16間には図4の(c)に示す電圧が発生する。なお、この制御信号出力タイミングtbは操作ボタン11Cの操作に応じて予め定められたものであり、上述したような電源投入時に吸込口制御部50を動作可能とするために制御信号を供給する場合とは異なるタイミングに設定されている。また、電圧波形は、図4の(c)に示すように手元操作部12の操作ボタン11Cが操作されてから次の操作があるまで同じとする、すなわち信号を出し続けるようにしてもよいし、操作ボタン11Cが操作されてから所定期間のみその操作に応じた電圧波形とし、その後は図4の(a)に示される交流電源の電圧波形とする、すなわち所定期間のみ信号を出力するようにしてもよい。ここで信号検出部54は、図4の(c)に示す電圧波形を図4の(d)に示す吸込口電源の検出信号に変換し、この検出信号を吸込口制御部50に出力する。吸込口制御部50は検出信号のローレベル期間tcあるいはハイレベル期間tdを測定することによりローレベル期間tcを認識し、その測定結果に応じて吸込口モータ13を所定の状態に制御する。
ここで商用交流電源31の周波数(周期)に変更があった場合、生成される検出信号のローレベル期間tcやハイレベル期間tdが変わってしまう。例えば、ある電圧を検出信号の閾値とし、ローレベル期間tcとハイレベル期間tdを認識すると、ゼロクロスから同じ時間タイミングで双方向性サイリスタ39をオンする場合、50Hzの地域は、60Hzの地域に比べ、ハイレベル期間tdは短く、ローレベル期間tcは長くなる。また商用交流電源31の電圧が変動した場合も同様に考えることができ、例えば、ゼロクロスから同じ時間タイミングで双方向性サイリスタ39をオンする場合、電圧実効値(以下、単に電圧として示す)が100V時と90V時の検出信号を比べると、90V時の検出信号のほうがハイレベル期間tdは短く、ローレベル期間tcは長くなる。このように周波数の変更や電圧の変動といった外部要因により、信号検出部54で生成する検出信号が示す位相情報も影響を受ける。
そこで、本体制御部37は読取った商用交流電源31の周波数と電圧の変動に応じて、制御信号を双方向性サイリスタ39の制御端子へ調整して出力する。図5に示すように、本体制御部37は周波数ごとにデータテーブルを備えていて、電圧検出部70から入力される電圧情報から商用交流電源31の電圧範囲(高電圧、標準電圧、低電圧)を判定する。そして判定した電圧範囲にしたがって制御信号出力タイミングtbを調整する。例えば商用交流電源31の周波数が50Hzで、電圧が100V以上110V未満の範囲(高電圧)であると判定した時は、制御信号出力タイミングtb=tb1を制御信号として双方向性サイリスタ39の制御端子へ出力する。また、商用交流電源31の周波数が50Hzで、電圧が90V以上100V未満の範囲(標準電圧)であると判定した時は制御信号出力タイミングtb=tb2を、電圧が80V以上90V未満の範囲(低電圧)であると判定した時は制御信号出力タイミングtb=tb3をそれぞれ出力する。ここで制御信号出力タイミングtbの時間設定はtb1<tb2<tb3である。標準電圧の判定による制御信号出力タイミングtb2を基準にすると、制御信号出力タイミングtbは高電圧判定で短く、低電圧判定で長くなるように設定する。商用交流電源31の周波数が60Hzになったときも同様に、判定した電圧範囲にしたがって制御信号出力タイミングtbを調整する(tb4<tb5<tb6)。なお、この実施例では周波数ごとに作成したデータテーブルを用いたが、電圧範囲ごとに作成してもよい。また、周波数と電圧範囲のデータテーブルが独立して備えられていてもよい。
本体制御部37の制御の流れを図6に基づいて説明する。本体制御部37は、ステップS1とS2にて商用交流電源31の電圧が適正範囲にあるかどうかを検出する。ここで、商用交流電源31の電圧が掃除機の電源電圧として不適当な110V以上、および80V未満になっている場合は、制御信号を双方向性サイリスタ39の制御端子に出力しない(ステップS20)。ステップS1とS2において電圧が適正範囲(80V以上110V未満)であることが確認された場合、ステップS3にて本体制御部37は商用交流電源31の周波数を読取り、周波数が50Hzであるかどうかを判断する。周波数が50Hzである場合にはステップS4に進む。
ステップS4においては、本体制御部37を構成するメモリ42に保存されているデータテーブルDT_50を使用して商用交流電源31の電圧から制御信号出力タイミングtbを決定する。本体制御部37は、ステップS5にて電圧検出部70から入力された電圧が100V以上であるかどうかを判断する。入力された電圧が100V以上である場合、商用交流電源31の電圧は高電圧であると判定し、ステップS6にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb1の制御信号を出力する。ステップS5にて電圧検出部70から入力された電圧が100V以上でない場合、ステップS7にて、入力された電圧が90V以上であるかどうかを判断する。入力された電圧が90V以上である場合、商用交流電源31の電圧が標準電圧であると判定し、ステップS8にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb2の制御信号を出力する。ステップS7にて入力された電圧が90V以上でない場合、商用交流電源31の電圧が低電圧であると判定し、ステップS9にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb3の制御信号を出力する。
ステップS4においては、本体制御部37を構成するメモリ42に保存されているデータテーブルDT_50を使用して商用交流電源31の電圧から制御信号出力タイミングtbを決定する。本体制御部37は、ステップS5にて電圧検出部70から入力された電圧が100V以上であるかどうかを判断する。入力された電圧が100V以上である場合、商用交流電源31の電圧は高電圧であると判定し、ステップS6にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb1の制御信号を出力する。ステップS5にて電圧検出部70から入力された電圧が100V以上でない場合、ステップS7にて、入力された電圧が90V以上であるかどうかを判断する。入力された電圧が90V以上である場合、商用交流電源31の電圧が標準電圧であると判定し、ステップS8にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb2の制御信号を出力する。ステップS7にて入力された電圧が90V以上でない場合、商用交流電源31の電圧が低電圧であると判定し、ステップS9にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb3の制御信号を出力する。
ステップS3にて商用交流電源31の周波数が50Hzでない場合にはステップS14に進む。ステップS14においては、本体制御部37を構成するメモリ42に保存されているデータテーブルDT_60を使用して商用交流電源31の電圧から制御信号出力タイミングtbを決定する。本体制御部37は、ステップS15にて電圧検出部70から入力された電圧が100V以上であるかどうかを判断する。入力された電圧が100V以上である場合、商用交流電源31の電圧は高電圧であると判定し、ステップS16にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb4の制御信号を出力する。ステップS15にて電圧検出部70から入力された電圧が100V以上でない場合、ステップS17にて、入力された電圧が90V以上であるかどうかを判断する。入力された電圧が90V以上である場合、商用交流電源31の電圧が標準電圧であると判定し、ステップS18にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb5の制御信号を出力する。ステップS17にて入力された電圧が90V以上でない場合、商用交流電源31の電圧が低電圧であると判定し、ステップS19にて双方向性サイリスタ39の制御端子へ制御信号出力タイミングtb=tb6の制御信号を出力する。
次に図7に基づいて、吸込口制御部50が、これらの制御信号出力タイミングtbの変化に連動する、吸込口体5に供給される電圧のローレベル期間tcを測定し、その測定結果に応じて吸込口モータ13を所定の状態に制御する場合について説明する。ステップS71にてローレベル期間tcをタイマ53が読取り、ステップS72で読取ったローレベル期間tcがpa<tc≦pbの範囲内であれば、吸込口制御部50はステップS73にてローレベル期間がtcaであることを認識し、ステップs74にて吸込口モータ13を正転させる。ステップS72で読取ったローレベル期間tcがpa<tc≦pbの範囲外で、かつpb<tc≦pcの範囲内であれば、ステップS76にて吸込口制御部50はローレベル期間tcがtcbであることを認識し、ステップS77にて吸込口モータ13を逆転させる。ステップS75にてローレベル期間tcがpb<tc≦pcの範囲外であれば、ステップS78にて吸込口制御部50はローレベル期間tcがtccであると認識し、ステップS79にて吸込口モータ13を停止させる。ここでは吸込口モータ13の動作が決定(正転/逆転/停止)したら再度ステップS71に戻り、常に検出信号のローレベル期間tcを読取るようにしているが、制御信号の出力に応じてローレベル期間tcを読取り続けるようにしてもよいし、所定期間のみローレベル期間tcを読取るようにしてもよい。
さらに他の実施の形態として、吸込口制御部50が図4(c)の波形を低電圧に変換し、その変換された低電圧をデジタル値に変換(A/D変換)し、メモリ51に保存したそのデジタル値を合計した値(面積)に応じて吸込口モータ13を所定の状態に制御する場合について図8に基づいて説明する。
ステップS81にて、図4(c)の波形から変換された低電圧(検出信号)の電圧値を読み取り、ステップS82にて読み取り回数が指定回数n回に達していない場合は、ステップS83にて電圧値データをメモリ51に保存する。n回に達している場合(例えば半周期や1周期経過した場合)はステップS84にてメモリ51に保存された電圧値データを合計し、ステップS85にて電圧値データの合計がpe<Vt≦pfの範囲内であれば、ステップS86にて吸込口制御部50は電圧読取値がvccであることを認識し、ステップS87にて吸込口モータ13を停止させる。電圧値データの合計がpe<Vt≦pfの範囲外で、かつステップS88にてpf<Vt≦pgの範囲内であれば、ステップS89にて吸込口制御部50は電圧読取値がvcbであることを認識し、ステップS90にて吸込口モータ13を逆転させる。電圧値データの合計がpf<Vt≦pgの範囲外であれば、ステップS91にて吸込口制御部50は電圧読取値がvcaであることを認識し、ステップs92にて吸込口モータ13を正転させる。吸込口モータ13を所定の状態に制御した後は、ステップS93にて指定回数nを初期値にリセットする。上記した実施の形態と同様、ここでは吸込口モータ13の動作が決定(正転/逆転/停止)したら再度ステップS81に戻り、常に図4(c)の波形から変換された低電圧(検出信号)の電圧値を読取るようにしているが、制御信号の出力に応じて電圧値を読取り続けるようにしてもよいし、所定期間のみ電圧値を読取るようにしてもよい。
以上説明したように本実施の形態の電気掃除機によれば、本体制御部37は商用交流電源31の周波数と電圧に応じて双方向性サイリスタ39の制御端子に加える制御信号を調整して出力し、電圧波形から位相情報を抽出する信号検出部54を吸込口体5に設け、この信号検出部54で電圧波形から指示信号を検出するので、電源の周波数や電圧の変動に対する信号伝達の確実性を高めることが可能である。また商用交流電源31の周波数情報や電圧情報は通常、掃除機本体が有する本体制御部37が読取る情報であり、既にある情報を利用できるため新たな検出部を吸込口体に追加する必要がない。
また、上記実施の形態においては、吸込口モータ13の動作のみの制御を行うために1種類の指示信号を出力するものとして説明した。しかしながら、例えば動作部に複数の制御を行うために複数の指示信号を送信する場合にも、交流電源の周波数の変更や電圧の変動等があれば周波数あるいは電圧に応じて電圧波形を調整したのちにそれぞれ指示信号として本体制御部37が出力することで、本発明を適用できる。その際には、読取値のばらつきを抑えることができるため、複数の信号を送信した場合に誤って別の信号として読み取ることを防止できる。
上記実施の形態においては、商用交流電源31の電圧範囲を大きく3つの区分(高電圧、標準電圧、低電圧)で判定し3種類の制御信号出力タイミングtbを設ける方法について説明したが、電圧範囲の区分を多くし(例えば5Vきざみ)これに応じた制御信号出力タイミングtbを設定することもできる。
上記実施の形態においては、掃除機本体1から吸込口体5に設けられた動作部に電源を供給するものについて説明したが、例えば、使用者に掃除機の状態を知らせる等の動作部としての報知部などでもよい。また、この動作部としての報知部、この電源となる電源部、およびこの報知部を制御する制御部をそれぞれ手元操作部12など連通管に設けてもよく、掃除機本体1から手元操作部12に報知部の交流電源を供給するものにおいて、電源を供給するために電圧の波形を制御する際に周波数、あるいは電圧の調整を行って制御してもよい。ここで連通管に設ける動作部としての報知部とは、例えばLEDやブザー等であってもよい。
1 掃除機本体
5 吸込口体
13 吸込口モータ(動作部)
14 電力線
16 電力線
31 商用交流電源
36 ゼロクロス検出部(周波数検出部)
37 本体制御部
39 双方向性サイリスタ
48 吸込口電源部(電源部)
50 吸込口制御部(制御部)
54 信号検出部
70 電圧検出部
5 吸込口体
13 吸込口モータ(動作部)
14 電力線
16 電力線
31 商用交流電源
36 ゼロクロス検出部(周波数検出部)
37 本体制御部
39 双方向性サイリスタ
48 吸込口電源部(電源部)
50 吸込口制御部(制御部)
54 信号検出部
70 電圧検出部
Claims (4)
- 電動送風機を備えた掃除機本体と、
この掃除機本体に接続され、電力線が配設された連通管と、
この連通管に接続され前記電動送風機の動作により塵埃を吸込む吸込口体とを有し、
前記吸込口体に、
前記電力線と接続されて前記掃除機本体から電圧が供給される電源部と、
前記電源部により動作する動作部とを備えた電気掃除機において、
前記掃除機本体には、前記掃除機本体に接続される交流電源の周波数を検出するとともに前記電源部に供給される電圧波形を指示信号として出力する本体制御部とを備え、
前記吸込口体に、前記本体制御部からの指示信号に基づいて前記動作部を制御する制御部とを備え、
前記本体制御部は、検出した前記周波数に応じて前記電圧波形を調整したのち前記指示信号として出力することを特徴とする電気掃除機。 - 電動送風機を備えた掃除機本体と、
この掃除機本体に接続され、電力線が配設された連通管と、
この連通管に接続され前記電動送風機の動作により塵埃を吸込む吸込口体とを有し、
前記連通管に、
前記電力線と接続されて前記掃除機本体から電圧が供給される電源部と、
前記電源部により動作する動作部と、
前記動作部の動作を設定する手元操作部とを備えた電気掃除機において、
前記掃除機本体には、前記掃除機本体に接続される交流電源の周波数を検出するとともに前記電源部に供給される電圧波形を指示信号として出力する本体制御部とを備え、
前記連通管に、前記本体制御部からの指示信号に基づいて前記動作部を制御する制御部とを備え、
前記本体制御部は、検出した前記周波数に応じて前記電圧波形を調整したのち前記指示信号として出力することを特徴とする電気掃除機。 - 電動送風機を備えた掃除機本体と、
この掃除機本体に接続され電力線が配設された連通管と、
この連通管に接続され前記電動送風機の動作により塵埃を吸込む吸込口体とを有し、
前記吸込口体に、
前記電力線と接続されて前記掃除機本体から電圧が供給される電源部と、
前記電源部により動作する動作部とを備えた電気掃除機において、
前記掃除機本体には、前記掃除機本体に接続される交流電源の電圧を検出するとともに前記電源部に供給される電圧波形を指示信号として出力する本体制御部とを備え、
前記吸込口体に、前記本体制御部からの指示信号に基づいて前記動作部を制御する制御部とを備え、
前記本体制御部は、検出した前記電圧に応じて前記電圧波形を調整したのち前記指示信号として出力することを特徴とする電気掃除機。 - 電動送風機を備えた掃除機本体と、
この掃除機本体に接続され電力線が配設された連通管と、
この連通管に接続され前記電動送風機の動作により塵埃を吸込む吸込口体とを有し、
前記連通管に、
前記電力線と接続されて前記掃除機本体から電圧が供給される電源部と、
前記電源部により動作する動作部と、前記動作部の動作を設定する手元操作部とを備えた電気掃除機において、
前記掃除機本体には、前記掃除機本体に接続される交流電源の電圧を検出するとともに前記電源部に供給される電圧波形を指示信号として出力する本体制御部とを備え、
前記連通管に、前記本体制御部からの指示信号に基づいて前記動作部を制御する制御部とを備え、
前記本体制御部は、検出した前記電圧に応じて前記電圧波形を調整したのち前記指示信号として出力することを特徴とする電気掃除機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007095028A JP2008246151A (ja) | 2007-03-30 | 2007-03-30 | 電気掃除機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007095028A JP2008246151A (ja) | 2007-03-30 | 2007-03-30 | 電気掃除機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008246151A true JP2008246151A (ja) | 2008-10-16 |
Family
ID=39971777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007095028A Pending JP2008246151A (ja) | 2007-03-30 | 2007-03-30 | 電気掃除機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008246151A (ja) |
-
2007
- 2007-03-30 JP JP2007095028A patent/JP2008246151A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110461201A (zh) | 具有插接模块的抽吸器具 | |
| JP2020108594A (ja) | 電気掃除機 | |
| JP6668968B2 (ja) | 電気掃除機 | |
| US20240180380A1 (en) | Cleaner having detachable or separable control module | |
| JP2008246151A (ja) | 電気掃除機 | |
| JP2013233198A (ja) | 電気掃除機 | |
| EP3305157B1 (en) | Cleaner | |
| US12446748B2 (en) | Cordless vacuum cleaner and method of controlling operation of cordless vacuum cleaner | |
| CN111134565B (zh) | 一种吸尘器调速控制系统及吸尘器 | |
| JP2005168977A (ja) | 電気掃除機 | |
| JP4922830B2 (ja) | 電気掃除機 | |
| JP5075453B2 (ja) | 電気掃除機 | |
| JP4818043B2 (ja) | 電気掃除機 | |
| JP2002360484A (ja) | 電気掃除機 | |
| JP2006181079A (ja) | 電気掃除機 | |
| JP4945217B2 (ja) | 電気掃除機 | |
| JP2007312962A (ja) | 電気掃除機 | |
| JP4444251B2 (ja) | 電気掃除機 | |
| CN119255740A (zh) | 能够自诊断的清洁系统及清洁系统的自诊断方法 | |
| JP5105846B2 (ja) | 電気掃除機 | |
| JP2013226287A (ja) | 電気掃除機 | |
| JP2008178564A (ja) | 電気掃除機 | |
| JP4982250B2 (ja) | 電気掃除機 | |
| JP4864618B2 (ja) | 電気掃除機 | |
| JP6711089B2 (ja) | 電気掃除機 |