JP2009040040A - 記録装置、記録システムおよび該システムの制御方法 - Google Patents
記録装置、記録システムおよび該システムの制御方法 Download PDFInfo
- Publication number
- JP2009040040A JP2009040040A JP2008181415A JP2008181415A JP2009040040A JP 2009040040 A JP2009040040 A JP 2009040040A JP 2008181415 A JP2008181415 A JP 2008181415A JP 2008181415 A JP2008181415 A JP 2008181415A JP 2009040040 A JP2009040040 A JP 2009040040A
- Authority
- JP
- Japan
- Prior art keywords
- recording
- distance
- image
- head
- platen
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/07—Ink jet characterised by jet control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J25/00—Actions or mechanisms not otherwise provided for
- B41J25/304—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface
- B41J25/308—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface with print gap adjustment mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
Landscapes
- Ink Jet (AREA)
Abstract
【解決手段】画像の内容の判別に応じて記録パス数およびヘッド−プラテン間距離を設定する指示を与える処理の実施の有無を選択可能とする。そして、当該処理の実施が選択された場合には、画像の内容(デューティなど)に対応して適切に記録パス数およびヘッド−プラテン間距離が設定されるようにする。一方、非選択の場合には、画像の内容によらず1パス記録とし、かつ広めのヘッド−プラテン間距離に設定する。
【選択図】図12
Description
搬送される前記記録媒体を支持するためのプラテンと、
記録すべき画像の内容を判別する判別処理を行うか否かの選択結果に応じて、前記記録ヘッドと前記プラテンとの距離を設定する設定手段とを備え、
前記設定手段は、前記判別処理を行うことが選択されている場合には前記判別処理により判別した画像の内容に応じて前記距離を設定し、前記判別処理を行うことが選択されていない場合には予め定められた距離を設定することを特徴とする。
搬送される前記記録媒体を支持するためのプラテンと、
前記同一領域に記録すべき画像の内容を判別する判別処理を行うか否かの選択結果に応じて、前記同一領域に対する前記記録ヘッドの移動の回数および前記記録ヘッドと前記プラテンとの距離を設定する設定手段とを備え、
前記設定手段は、前記判別処理を行うことが選択されている場合には前記判別処理により判別した画像の内容に応じて前記記録ヘッドの移動の回数および前記距離を設定し、前記判別処理が選択されていない場合には予め定められた前記記録ヘッドの移動の回数および予め定められた前記距離を設定することを特徴とする。
前記判別処理を行う処理手段と、
前記判別処理を行うか否かを選択する選択手段と、
を具えたことを特徴とする。
前記判別処理を行う処理工程と、
前記判別処理を行うか否かを選択する選択工程と、
を具えたことを特徴とする。
図1は、本発明を適用可能なカラーインクジェット記録装置の一実施形態の構成を示す概略斜視図である。図1において205〜208はインクジェットカートリッジである。これらは4色のカラーインク、すなわちブラック(K)、シアン(C)、マゼンタ(M)、イエロー(Y)のインクがそれぞれ貯留されたインクタンクと、それぞれのインクに対応した記録ヘッド201〜204より構成されている。
図2は、記録ヘッド201〜204のうち、記録ヘッド201の要部を示す模式的斜視図である。なお、他の記録ヘッド202〜204についても基本的に記録ヘッド201と同一の構成となっている。
本実施形態の記録装置は、基本的にヘッド−プラテン間距離を調整可能なものとして構成される。
図5は、上述したインクジェット記録装置の制御を実行するための記録システムの制御系の構成例である。図5において、1001は画像データの供給装置としてのホストコンピュータであり、記録装置1000で記録(印刷)させる印刷データを生成したり、各種指示入力を行ったりする。601はプリンタドライバであり、印刷に関する各種指示を行うための設定画面を表示するとともに、設定画面による設定値に応じて印刷データを生成する。602は記憶装置であり、プリンタドライバ601が生成した印刷データを一時的に記憶する。また、この記憶装置602には、ホストコンピュータ1001を制御するオペレーティングシステム(OS)、各種制御プログラム、印刷データの元となるデータを生成するアプリケーションプログラム等が記憶されている。なお、ホストコンピュータ1001は、汎用的なパーソナルコンピュータに搭載される標準的なハードウェア構成要素を有している。これは、例えばCPU、RAM、ROM、ハードディスク、外部記憶装置、ネットワークインタフェース、ディスプレイ、キーボード、マウス等である。
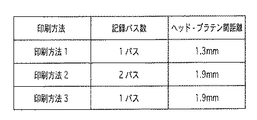
本実施形態では、画像の内容の判別に応じて記録パス数およびヘッド−プラテン間距離を設定する指示を与える処理(画像判別機能)の実施の有無を選択可能とする。そして、画像判別機能の実施が選択された場合には、画像の内容に応じて「印刷方法1」および「印刷方法2」(後述)のいずれかが実施されるようにし、選択されなかった場合には画像の内容によらず「印刷方法3」が実施されるようにする。詳しくは、画像判別機能の実施が選択された場合には、判別した画像の内容に応じて、「印刷方法1」あるいは「印刷方法2」に対応した記録パス数とヘッド−プラテン間距離の組合せを設定する。一方、画像判別機能の実施が選択されていない場合には、「印刷方法3」に対応した予め定められた記録パス数と予め定められたヘッド−プラテン間距離の組合せを設定する。
描画面積S[1]=(Xe[1]−Xs[1])×(Ye[1]−Ys[1])
となる。また、「描画命令2」に対して、描画領域(Xs[2],Ys[2])−(Xe[2],Ye[2])の描画データが渡されたとすると、
描画面積S[2]=(Xe[2]−Xs[2])×(Ye[2]−Ys[2])
となる。同様に、描画命令nに対して、描画領域(Xs[n],Ys[n])−(Xe[n],Ye[n])の描画データが渡されたとすると、
描画面積S[n]=(Xe[n]−Xs[n])×(Ye[n]−Ys[n])
となる。
T[1]=T[1]+S[1]×K[1]
となる。また、描画命令2に対する面積テーブルT[2]には、S[2]×K[2]が加算され、
T[2]=T[2]+S[2]×K[2]
となる。同様に、描画命令nに対する面積テーブルT[n]には、S[n]×K[n]が加算され、
T[n]=T[n]+S[n]×K[n]
となる。
T[0]=T[0]+S[1]×K[1]+S[2]×K[2]+・・・
・・・+S[n]×K[n]
として処理する。
記録制御の第2例として、上記第1例の構成に加え、さらに記録装置が置かれた環境条件(温度、湿度)によってヘッド−プラテン間距離を変更する形態について説明する。
上述の実施形態においては、OSの制御言語で記述された印刷データに含まれる描画命令の種類に応じた係数と、描画面積との乗算値(仮想描画面積)の合計値から画像の内容としてデューティを判別し、その高低に基づいて印刷方法を選択可能な構成とした。しかし印刷データに含まれている描画命令に基づいて直接的に印刷方法を選択可能としてもよい。すなわち、印刷データに含まれているテキストの描画命令の割合や、イメージの描画命令の割合またはその分散状態などから、印刷方法を選択することも可能である。
106 キャリッジ
107 記録媒体
201〜204 記録ヘッド
420 紙間距離調整機構
430 センサ群
500 制御部
601 プリンタドライバ
Claims (12)
- インクを吐出するための記録ヘッドを記録媒体に対して移動させる動作と、前記記録ヘッドの移動の方向とは交差する方向へ前記記録媒体を搬送させる動作とを行うことにより、前記記録媒体に画像を記録する記録装置であって、
搬送される前記記録媒体を支持するためのプラテンと、
記録すべき画像の内容を判別する判別処理を行うか否かの選択結果に応じて、前記記録ヘッドと前記プラテンとの距離を設定する設定手段とを備え、
前記設定手段は、前記判別処理を行うことが選択されている場合には前記判別処理により判別した画像の内容に応じて前記距離を設定し、前記判別処理を行うことが選択されていない場合には予め定められた距離を設定することを特徴とする記録装置。 - 前記設定手段は、(i)前記判別処理を行うことが選択されている場合、前記判別処理により判別した画像の内容に応じて、第1の距離あるいは前記第1の距離よりも大である第2の距離を設定し、(ii)前記判別処理を行わないことが選択されていない場合、前記予め定められた距離として前記第2の距離を設定することを特徴とする請求項1に記載の記録装置。
- インクを吐出するための記録ヘッドを記録媒体に対して移動させる動作と、前記記録ヘッドの移動の方向とは交差する方向へ前記記録媒体を搬送させる動作とを行うことにより、前記記録媒体の同一領域に画像を記録する記録装置であって、
搬送される前記記録媒体を支持するためのプラテンと、
前記同一領域に記録すべき画像の内容を判別する判別処理を行うか否かの選択結果に応じて、前記同一領域に対する前記記録ヘッドの移動の回数および前記記録ヘッドと前記プラテンとの距離を設定する設定手段とを備え、
前記設定手段は、前記判別処理を行うことが選択されている場合には前記判別処理により判別した画像の内容に応じて前記記録ヘッドの移動の回数および前記距離を設定し、前記判別処理が選択されていない場合には予め定められた前記記録ヘッドの移動の回数および予め定められた前記距離を設定することを特徴とする記録装置。 - 前記設定手段は、環境条件に応じて前記記録ヘッドの移動の回数および前記距離の少なくとも一方を設定することを特徴とする請求項1または請求項3に記載の記録装置。
- 前記判別処理を行う処理手段を具えたことを特徴とする請求項1ないし請求項4のいずれかに記載の記録装置。
- 前記判別処理を行うか否かを選択する選択手段を具えたことを特徴とする請求項5に記載の記録装置。
- 請求項1ないし請求項4のいずれかに記載の記録装置と、該記録装置によって記録される画像のデータを供給する供給装置と、を具えた記録システムにおいて、
前記判別処理を行う処理手段と、
前記判別処理を行うか否かを選択する選択手段と、
を具えたことを特徴とする記録システム。 - 前記供給装置は、前記処理手段および前記選択手段を具えることを特徴とする請求項7に記載の記録システム。
- 前記処理手段は、前記画像の内容として前記画像のデューティを判別し、
前記設定手段は、前記デューティが閾値よりも低い場合には第1の距離を設定し、前記デューティが閾値よりも高い場合には前記第1の距離よりも大である第2の距離を設定することを特徴とする請求項8に記載の記録システム。 - 請求項1ないし請求項4のいずれかに記載の記録装置と、該記録装置によって記録する画像のデータを供給する供給装置と、を具えた記録システムの制御方法において、
前記判別処理を行う処理工程と、
前記判別処理を行うか否かを選択する選択工程と、
を具えたことを特徴とする記録システムの制御方法。 - 前記供給装置において前記処理工程および前記選択工程が実施されることを特徴とする請求項10に記載の記録システムの制御方法。
- 前記供給装置としてのコンピュータに請求項11に記載の制御方法を実行させるための制御プログラムを記憶した記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008181415A JP2009040040A (ja) | 2007-07-13 | 2008-07-11 | 記録装置、記録システムおよび該システムの制御方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007184497 | 2007-07-13 | ||
| JP2008181415A JP2009040040A (ja) | 2007-07-13 | 2008-07-11 | 記録装置、記録システムおよび該システムの制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009040040A true JP2009040040A (ja) | 2009-02-26 |
Family
ID=40252728
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008181415A Pending JP2009040040A (ja) | 2007-07-13 | 2008-07-11 | 記録装置、記録システムおよび該システムの制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US8646861B2 (ja) |
| JP (1) | JP2009040040A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013086300A (ja) * | 2011-10-14 | 2013-05-13 | Seiko I Infotech Inc | インクジェット記録装置及び記録方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8888212B2 (en) * | 2013-01-29 | 2014-11-18 | Hewlett-Packard Development Company, L.P. | Printhead spacing |
| JP7073723B2 (ja) * | 2018-01-10 | 2022-05-24 | セイコーエプソン株式会社 | 記録装置および記録方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002127399A (ja) * | 2000-10-30 | 2002-05-08 | Seiko Epson Corp | 記録装置 |
| JP2002292856A (ja) * | 2001-03-30 | 2002-10-09 | Seiko Epson Corp | 印刷媒体の変形を考慮した印刷 |
| JP2006102987A (ja) * | 2004-09-30 | 2006-04-20 | Seiko Epson Corp | 印刷システム、印刷データ生成用プログラム及び記憶媒体 |
| JP2006103278A (ja) * | 2004-10-08 | 2006-04-20 | Canon Inc | 記録装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3323625B2 (ja) * | 1994-01-25 | 2002-09-09 | キヤノン株式会社 | カラーインクジェット記録方法 |
| JP3667096B2 (ja) * | 1998-06-30 | 2005-07-06 | キヤノン株式会社 | インクジェット記録装置及びインクジェット記録方法 |
| JP4343481B2 (ja) * | 2001-02-06 | 2009-10-14 | キヤノン株式会社 | インクジェット記録装置及びインクジェット記録方法 |
| JP4911824B2 (ja) * | 2001-02-23 | 2012-04-04 | キヤノン株式会社 | 画像形成装置及び方法 |
| US7175246B2 (en) * | 2003-04-18 | 2007-02-13 | Konica Minolta Medical & Graphic, Inc. | Inkjet recording device |
-
2008
- 2008-07-10 US US12/170,569 patent/US8646861B2/en not_active Expired - Fee Related
- 2008-07-11 JP JP2008181415A patent/JP2009040040A/ja active Pending
-
2013
- 2013-03-15 US US13/837,014 patent/US20130249980A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002127399A (ja) * | 2000-10-30 | 2002-05-08 | Seiko Epson Corp | 記録装置 |
| JP2002292856A (ja) * | 2001-03-30 | 2002-10-09 | Seiko Epson Corp | 印刷媒体の変形を考慮した印刷 |
| JP2006102987A (ja) * | 2004-09-30 | 2006-04-20 | Seiko Epson Corp | 印刷システム、印刷データ生成用プログラム及び記憶媒体 |
| JP2006103278A (ja) * | 2004-10-08 | 2006-04-20 | Canon Inc | 記録装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013086300A (ja) * | 2011-10-14 | 2013-05-13 | Seiko I Infotech Inc | インクジェット記録装置及び記録方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090015610A1 (en) | 2009-01-15 |
| US8646861B2 (en) | 2014-02-11 |
| US20130249980A1 (en) | 2013-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7396098B2 (en) | Inkjet printing apparatus and inkjet printing method | |
| JP2008168620A (ja) | インクジェット記録装置およびインクジェット記録方法 | |
| JP2005022404A (ja) | 記録装置および記録方法 | |
| JP4834466B2 (ja) | インクジェット記録装置および予備吐出方法 | |
| JP3576782B2 (ja) | 記録装置及び記録制御方法 | |
| JP2003305836A (ja) | 記録装置、情報処理装置及びそれらの制御方法、プログラム | |
| JP2004142452A (ja) | インクジェット記録方法及び装置、プログラム | |
| JP2009040040A (ja) | 記録装置、記録システムおよび該システムの制御方法 | |
| JP2009248528A (ja) | インクジェット記録装置およびインクジェット記録方法 | |
| JP4018433B2 (ja) | 記録装置 | |
| JP4632416B2 (ja) | インクジェット記録装置およびインクジェット記録方法 | |
| JPH06127033A (ja) | シリアル型記録装置における記録方法 | |
| JP2006027181A (ja) | インクジェット記録装置およびインクジェット記録方法、並びにコンピュータプログラム | |
| JP2003305902A (ja) | 記録装置、情報処理装置及びそれらの制御方法、プログラム | |
| JP2009113329A (ja) | インクジェット記録装置 | |
| JP4280453B2 (ja) | 記録装置及び記録ヘッドの温度管理方法 | |
| JP2006159547A (ja) | インクジェット記録装置 | |
| JP2008149566A (ja) | 記録装置、記録方法および画像処理装置 | |
| US11254133B2 (en) | Printing apparatus and non-transitory computer-readable recording medium for printing apparatus | |
| JP4839503B2 (ja) | インクジェット記録装置及びインクジェット記録方法 | |
| JP2009010880A (ja) | 画像処理方法、画像処理装置およびプログラム | |
| JP2006168041A (ja) | インクジェット記録装置、及びインクジェット記録方法 | |
| JP2006159612A (ja) | インクジェット記録装置 | |
| JP2001199137A (ja) | プリント装置およびプリントシステム | |
| JP2001171147A (ja) | インクジェット記録装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101106 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121106 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130409 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131001 |