JP2009057721A - 深海鉱物の連続採取方法およびその装置 - Google Patents
深海鉱物の連続採取方法およびその装置 Download PDFInfo
- Publication number
- JP2009057721A JP2009057721A JP2007224474A JP2007224474A JP2009057721A JP 2009057721 A JP2009057721 A JP 2009057721A JP 2007224474 A JP2007224474 A JP 2007224474A JP 2007224474 A JP2007224474 A JP 2007224474A JP 2009057721 A JP2009057721 A JP 2009057721A
- Authority
- JP
- Japan
- Prior art keywords
- rope
- bucket
- mining
- mineral
- ship
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 229910052500 inorganic mineral Inorganic materials 0.000 title claims abstract description 37
- 239000011707 mineral Substances 0.000 title claims abstract description 37
- 238000000034 method Methods 0.000 title claims description 16
- 238000005065 mining Methods 0.000 claims description 75
- 238000004364 calculation method Methods 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 7
- 238000005070 sampling Methods 0.000 claims description 6
- 238000012937 correction Methods 0.000 claims description 2
- 206010039509 Scab Diseases 0.000 description 10
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 7
- 238000002474 experimental method Methods 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 4
- PWHULOQIROXLJO-UHFFFAOYSA-N Manganese Chemical compound [Mn] PWHULOQIROXLJO-UHFFFAOYSA-N 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 229910052748 manganese Inorganic materials 0.000 description 3
- 239000011572 manganese Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000000605 extraction Methods 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 229910019142 PO4 Inorganic materials 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 239000010452 phosphate Substances 0.000 description 1
- NBIIXXVUZAFLBC-UHFFFAOYSA-K phosphate Chemical compound [O-]P([O-])([O-])=O NBIIXXVUZAFLBC-UHFFFAOYSA-K 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 239000003643 water by type Substances 0.000 description 1
Images












Landscapes
- Drilling And Exploitation, And Mining Machines And Methods (AREA)
Abstract
【課題】水深800乃至2000mの海山の傾斜面や平坦なテラス状の海底表面上の比較的狭小な面積に高い賦存密度で存在する採鉱物を、バケット付ロープを用いて効率よく採取する技術を提供する
【解決手段】洋上における採鉱船10の位置をGPS信号受信器20を用いて測定し、測定したデータに基づき、バケット51付ロープ50の繰出位置81及び引揚位置80におけるロープ50の鉛直傾斜角及び水平方向角を測定し、この測定値及びGPS信号受信器20のデータから、ロープ50の鉱床への着底点および離底点を計算し、さらにバケット51のドレッジ音を音響装置90で探知し、これらにより採鉱船10の適正な位置及び方位を求め、採鉱船10の運動を外舷スラスタ30、サイドスラスタ40により適正に制御して採鉱する。
【選択図】 図1
【解決手段】洋上における採鉱船10の位置をGPS信号受信器20を用いて測定し、測定したデータに基づき、バケット51付ロープ50の繰出位置81及び引揚位置80におけるロープ50の鉛直傾斜角及び水平方向角を測定し、この測定値及びGPS信号受信器20のデータから、ロープ50の鉱床への着底点および離底点を計算し、さらにバケット51のドレッジ音を音響装置90で探知し、これらにより採鉱船10の適正な位置及び方位を求め、採鉱船10の運動を外舷スラスタ30、サイドスラスタ40により適正に制御して採鉱する。
【選択図】 図1
Description
本発明は、海山海底に存在するコバルト等に富んだクラスト鉱床等や、燐鉱やマンガンノジュール等の深海底に賦存する鉱物資源の連続採取方法及びその装置に関し、特にクラスト鉱床に好適に適用されるものである。
クラスト鉱床は深海底金属塊の一種で、水深800m乃至2000mの海山の傾斜面や平旦なテラス伏の海底表面上に分布している。マンガンノジュール鉱床は水深4000m乃至6000mの深海底表面上に深海底の広大な面積に賦存している。
クラスト鉱床は比較的狭小な面積上に存在し、賦存密度が非常に高い鉱床である。これを採鉱するためには、狭い鉱床で有効に採鉱することができる改良された独特の採鉱技術を必要とする。
海山海域におけるクラスト鉱床の採鉱に最も障害となるのは、変化する海象及び気象で、低速運航する採鉱船にとっては、この対策は特に必要である。
本発明者等は、海底鉱物を採取するため、バケット付ロープを用いるいわゆる連続バケット法の研究開発に努力して来た(例えば特許文献1〜3参照。)。
海底鉱物採取の実用化を図る採鉱実験が1972年(昭和47年)9月にハワイ沖の海域で行われた。この採鉱実験は16,000トンの極洋丸No.2を使用した国際実験で、15日間行われた。大型船の極洋丸No.2は推進機を止めて、100m間隔にバケットを吊下げた全長12,000mのロープを用いて、水深4900〜5000mの海底に賦存するマンガンノジュールを採取した。このとき、赤道域の貿易風は一定であるとの仮定の下で連続バケットを運転した。
この採鉱実験における採鉱船の漂流速度は約0.6ノット位であったが、実際の漂流速度は周期的に変動し、ロープ長が一定であったので、流れが速くバケットが着底しないような時間があり、また、流れが遅くバケットを曳かない時間もあった。成功裏にバケットが引揚げられたのは3回で、そのうち1回は、100個のバケットがクラスト状の海底鉱物を連続して採鉱した。
最も良い時には100個のバケットのクラスト状鉱物の収量は25%以上で、主にクラスト状の採鉱物が得られた。ノジュール状の採鉱物は20個のバケットで得られ、バケットの収量は5%程度であった。
また流れの変化によって、流れが止った状況の時には昇降する2本のロープのからみ合いも発生し、採鉱船は流れによるドリフトでなく、推進機による緩やかな制御された運動が必要であると判断された。
昭和46年特許出願公告第23482号
昭和52年特許出願公告第39361号
昭和52年特許出願公告第48561号
本発明は、水深800乃至2000mの海山の傾斜面や平坦なテラス状の海底表面上の比較的狭小な面積に高い賦存密度で存在するクラスト鉱床等の採鉱物を、効率よく採取するための、改良された採鉱技術を提供することを目的とするものである。
本発明は、バケット付ロープを用いる深海鉱物の採取技術において、海象及び気象が変化しても、それらに影響されることなく、最も有効に連続採取することができる技術を提供するものである。
また、本発明の別の課題は連続バケット付ロープにおいてトラブルとなる昇降ロープのからみ合い事故を防止するものである。
上記課題を解決するための本発明の技術手段は、バケット付ロープを用いて深海鉱物を採取する方法において、洋上における採鉱船自身の鉱物賦存区域に対する位置を検知すると共に、前記ロープの繰出位置及び引揚位置におけるロープの鉛直傾斜角及び水平方向角を測定し、これらのデータからロープの着底点及び離底点を推定し、該着定点及び離底点が鉱床内にあると共に、昇降ロープのからみ合いを防止するように、採鉱船の運動を制御することを特徴とする深海鉱物の連続採取方法である。
採鉱船の位置は鉱物賦存区域の地形図や水深などと、GPS手段等によって検知することができる。
また、ロープの鉛直傾斜角とはロープの鉛直線に対する傾き角を云い、水平方向角とは、ロープの水平投影面におけるロープの方向と基準方向とのなす角を云う。基準方向としては、例えば採鉱船の船軸に平行な方向とすればよい。
ロープ着底点及び離底点の推定は、ロープがカテナリー曲線を描くと仮定することによって、上記採鉱船の位置、ロープの鉛直傾斜角及び水平方向角の測定値とロープ長と水深に基いて計算することができる。この場合、ロープのカテナリー曲線を直線であると仮定しても実用上ほとんど問題はない。ロープの鉛直傾斜角は、主として採鉱船の軸方向運動、海流及びロープ速度に支配される。
上昇ロープと下降ロープとのからみ合いを防止するには、ロープの着底点と離底点が離れるようにすればよく、ロープの水平方向角によって判定することができる。ロープの水平方向角は、採鉱船の船軸に直交する方向の運動及び海流によって変化する。
また、採鉱船の位置及び運動を制御する手段は、採鉱船に設けた外舷スラスタ、サイドスラスタを用いることによって容易に実現することができる。
従来、採鉱船の位置検出や運動制御を行っていなかったので、採鉱船が受ける潮流や風などの外乱による採鉱への影響を避けることが困難であったが、本発明方法によれば採鉱船の位置と運動を制御するので、これらの影響を完全に除外して、効率のよい採鉱を行うことができる。
上記方法において、バケットのドレッジ音を探知してバケットの海底からの浮上りを検知することができる。これに基いてバケットの着底と離底を確認し、これを採鉱船の運動に加える技術を併用すると、海底の地形や水深の変動、海象、気象の変化、影響を修正することができ、採鉱船の適正な運動を確保することができ好適である。
上記本発明方法の実施に用いる本発明の装置は、バケット付ロープを用いて採鉱船により深海鉱物を採取する装置において、採鉱船の位置を検知する検知装置と、ロープの繰出位置及び引揚位置におけるロープの鉛直傾斜角及び水平方向角を測定する測定装置と、ロープの着底点及び離底点を推定する計算装置と、該推定に基づき採鉱船の運動を制御する制御装置とを備えたことを特徴とする深海鉱物の連続採取装置である。
そして、前記採鉱船の位置を測定する装置はGPS装置とすれば、簡易に所望精度の位置測定を行うことができ、好ましい。
本発明によれば、採鉱船の位置及び運動と採鉱すべき海底鉱物賦存区域との相互関係を、潮流、風速、その他の条件の変化に拘らず、誤差の範囲内で適切に制御することが可能となった。
従って、採鉱能率が画期的に向上すると共に、ロープのからみ合い等のトラブルを生ずることなく、安定的に高能率操業をすることができるというすぐれた効果を奏する。
衛星よりのGPS船位信号と連続ロープの長と傾角と方位角のデータ、風速、流速のデータを合せ精度あるバケット軌跡計算機を持ったことは本発明の一つの特長であり、限られた区域の変化の大きい鉱床上での適切な運行を可能にするものである。
本発明はバケット付ロープを用いて深海鉱物を採取する方法において、次の技術手段を講じたものである。
(a)洋上における採鉱船自身の鉱物賦存区域に対する位置を検知すること。
(b)ロープの繰出位置及び引揚位置におけるロープの鉛直傾斜角及び水平方向角を測定すること。
(c)ロープの鉱床への着底点及び離底点を計算し推定すること。
(d)ロープの着底点及び離底点が鉱床内にあるように、かつ、ロープのからみ合いを防止するように採鉱船の運動を制御すること。
(a)洋上における採鉱船自身の鉱物賦存区域に対する位置を検知すること。
(b)ロープの繰出位置及び引揚位置におけるロープの鉛直傾斜角及び水平方向角を測定すること。
(c)ロープの鉱床への着底点及び離底点を計算し推定すること。
(d)ロープの着底点及び離底点が鉱床内にあるように、かつ、ロープのからみ合いを防止するように採鉱船の運動を制御すること。
本発明は、舷外機等の推進機を複数装備した深海鉱物採取船より繰出されたエンドレスロープの鉛直傾斜角と水平方向角をロープの繰出位置及び引揚位置において測定し、水深とロープ長に基づきロープバケットの海底への着地点と離底点を計算により求める。一方GPS受信機で船位を検知する。これらを合せて、バケットの海底への位置軌跡を推定し、その軌跡を別に調査された深海鉱物鉱床の上に正しく位置するようにスラスタを使い採鉱船の運動を制御する。
バケット付ロープの繰出位置及び引揚位置における鉛直傾斜角と水平方向角の測定は、ロープの方向を検出する専用の測定装置を用いて測定することができる。しかし、例えば、ロープの繰出位置及び引揚位置のロープ案内車を鉛直軸まわりに可動に形成すると共にロープの上下を検出する腕を設け、ロープ案内車がロープの方向に倣って動く動き及び腕の動きをポテンショメータ等によって角度の変動として測定することができる。これらの角度情報をもとに、海底へ延びるエンドレスロープの着底点と離底点を算出する。
以下図面を参照して本発明の実施の形態を説明する。
図1に本発明の実施例の深海鉱物採取システム1の全体説明図を示す。
採鉱船10は、採鉱用のバケット51を取付けたエンドレスロープ50を採鉱船10と海底の深海鉱物賦存区域200との間を循環させて鉱石201を採鉱する。
エンドレスロープ50は引揚げロープ案内車80を通って海中より採鉱船10内に入り、採鉱船10内で引揚げられたバケット51を転倒してバケット51の中の採取物を船内に落す。エンドレスロープ50はボールローラと駆動車を組合わせたロープ駆動機70等を用いたロープ駆動機により駆動され、送り出しロープ案内車81を通して海中に進入する。
海中に進入したバケット付エンドレスロープ50は海底に到達し、海底上のクラストやノジュール(鉱石201)をバケット51の中に入れて引揚げられる。
採鉱船は通常航海のための主プロペラ、主舵および採取物の収容施設等を備えている(図示省略)。
採鉱船10には人工衛星よりの電波を受信するGPS信号受信機20が取付けられ、船尾の甲板上には外舷スラスタ30を備え、船体前部には、サイドスラスタ40と船体を横断する貫通孔41を備えている。深海鉱石を採取する多数のバケット51を装着したバケット付エンドレスロープ50を採鉱船10から、海中に繰出し引揚げる。引揚側ロープ50aは矢印52方向に進み、繰出側ロープ50bは矢印53方向に繰出される。バケット51は深海鉱物賦存区域200内の鉱床上を引きづられて鉱石201を採取する。ロープ50はロープ案内車80を通って船上に引き上げられ排鉱櫓60でバケット51内の鉱石を船上に排出し、ロープ駆動装置70、ロープ案内車81を経て、海底に循環される。
引揚位置のロープ案内車80,繰出位置のロープ案内車81の位置でロープ50a、50bの鉛直傾斜角及び水平方向角を測定する。
GPS信号受信器20が検知した採鉱船10の深海鉱物賦存区域200との関係位置及びロープ50a、50bのそれぞれの鉛直傾斜角及び水平方向角のデータは図示省略した採鉱船10内に設けた計算・制御装置に送られる。計算、制御装置はバケット51の鉱床への着底点、離底点を計算し、この着底点、離底点が鉱床内にあるように外舷スラスタ30、サイドスラスタ40を駆動し採鉱船10任意の方向に任意の速度で移動させ、その運動を制御する。
音響探知装置90は、水中にマイクロホン92等をケーブル91で吊下し、バケット51のドレッジ音を探知する。ロープ50が採鉱船10の移動速度や潮流などの影響によって、水中に浮上してバケットが着底しない場合があるので、音響探知装置90の探知を参照してバケット51の着底を確認し、ロープの浮上を防止するように採鉱船10の運動制御を行う。
GPS(Global Positioning System)信号受信器20は2〜3個の人工衛星からの航法用信号を受け、人工衛星よりの距離をドップラ波を測定することにより算出し、人工衛星からの距離によって採鉱船10の位置を求めるものである。この技術を連続バケット式深海鉱業に利用することは従来全くなかった。
深海鉱業を実施するためには採鉱船の位置を精度よく求めることが必要であり、GPSの採用により採鉱船10の位置測定精度の飛躍的向上を図ることができるようになった。
GPSによる位置検出の原理を図2に示した。GPS信号受信器20は人工衛星より発信される電波を受信し、採鉱船10の位置を測定する。図2はGPS衛星S1,S2,S3からの距離SP1,SP2,SP3を半径とする円C1,C2,C3の交点として採鉱船の位置Pが求められる測定の原理を説明したものである。
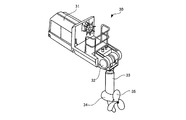
図3に外舷スラスタ30の1例を示した。外舷スラスタ30は採鉱船10の甲板上に設けられ、水中にプロペラ35を備えている。エンジン34の出力は伝導部32、33、34の組歯車及び組傘歯車でプロペラ35を回転させる。プロペラ35の回転方向は大歯車と小歯車の組合せによって変更することができる。このプロペラ35の推力の大きさはエンジン31の回転数の変更により行い、推力の方向はプロペラ35の軸の方向を変更して行う。外舷スラスタ30及びサイドスラスタ40の操作によりどの方向へも推力を発生させることができ、採鉱船10は任意の運動が可能となる。
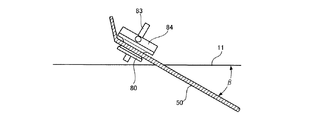
図4、図5は、ロープ引揚位置(又は繰出位置)におけるロープ案内車80(又はロープ案内車81)を示すもので、ロープ案内車80は採鉱船10の外舷11にほぼ直角な軸83を中心に回転し、鉛直軸82を中心として揺動自在に吊下げられている。
図4、図5に示すように、ロープ50の引揚位置と繰出位置で連続ロープの傾角と方向角を精度良く(1°以下の精度)測定し、深度Dを測深機で測定し、又はロープ長からのバケットの着底と離底点とを計算する。
ロープ案内車80はパケット51(図示省略)を取付けたロープを案内するので、前面が開放型で背面の背板板84に支持され、この背面板は鉛直軸82によって吊り下げられており、この鉛直軸82を中心としてそのまわりに揺動自在に吊下げられている。この軸に吊下げされた水平方向角測定用腕とその先端に取付けられた水平方向角測定用車で連続ロープの鉛直傾斜角αとを水平方向角βを計測する。水平方向角はロープ50の水平投影線と採鉱船10の軸線とのなす水平面内の角度である。この測定したαおよびβのデータからバケット51の海底への着底点及び離底点を計算する。ロープ長Lの時バケット着地点は船位のL・cosαだけ後で、Lcosβだけ横に位置している。
角度の計測精度を1度とすると測位精度としてロープ長2000mのとき34mである。GPSの測位精度は、約30mであるから両者は略相当する誤差範囲内の実用的測定となる。
なお連続ロープにかかる力は非常に強大であるので、これ等滑車ならびに支持機構は十分に強く設計したものを使用する必要がある。
また船位のデータをGPS信号受信器20で求め、これらのデータを合せて、ロープバケットの着地点と、引揚点を求め、金属鉱床の調査データを参照して海底鉱物賦存区域の鉱床上をバケットが移動するように採鉱船10の運動を計算する計算装置を採鉱船10に搭載する。
この外、計算機の中に入力するデータとして、風速、海流、潮流による採鉱船の漂流データがある。従来の実験では風、海流や潮流及び船のドラフトによるロープ傾角の実例として、ハワイ沖第2極洋丸の操業実験では、船のエンジンを停止して自在に漂流している条件において、ロープの鉛直傾斜角は横方向に流される速度が0.4ノットでは20度,0.6ノットでは38度、1.2ノットで60度であった。そして、その例ではロープの鉛直傾斜角が38°〜33°の時に良好な金属塊が採鉱され、ロープ角度が40°以上のときはバケットが海底から浮上っていた。
本発明では、採鉱船10の運動速度を外舷スラスタ30やサイドスラスタ40を用いて制御するので、効率の良い採鉱を実現することができる。
バケット51をつけた連続ロープ50は図6、図7に示したボールローラ55と図8、図9に示した水平多重車72の組合せにより、バケット51をロープ50につるしたまま連続駆動される。
ボールローラ55は2個のボールの間にロープ50を挟み、支持材58に取付けたモータ56により軸受57を介してボールローラ55を回転させてロープ50を駆動する。バケット51はロープ50に吊下げられたままボールローラ55の下方を通過する、水平多重車72はモータ71によって鉛直軸まわりに回転する多数のシーブであって、ロープ50を中心角で200〜240°順次互いちがいに巻きつけ、ロープ50を駆動する。
図10および図11はバケット51の中の採取物を甲板に落す、バケット転倒トラス機構を示したものである。斜に傾斜した櫓60の傾斜側の側面にシーブ62、63、64を上下に配設して、これらのシーブ62、63、64にロープ50を巻掛けて斜めに昇降させ、昇降によるバケット51の転倒によりバケット内の収容物を落下させ回収鉱石202を得るものである。
図12はドレッジ音を探知する音響装置90を示したものである。実際の採鉱は複雑であり、また、海流等の流速は深度により変るものであり、バケット51の海底からの浮上りを検出する必要がある。
バケット51の軌跡をチェックし修正するためバケット51が着底し、ドレッジしている時に発する音を聞き、着底を確認することが効果的である。
音響装置90の水中マイクロホン92は採鉱船10よりケーブル91で水中に吊り下げられ、水中音を把える。バケット51の水中音は一般に横にひろがり、マイクロホン92を深く海中に置けば良く聞える。
バケットが海底の鉱床上をドレッジする時の音はかなり高く、海底をバケットがドレッジしているか又は着底してなくてまだ全部水中にあるかを明瞭に識別することができる。この音響を採鉱船10の運動制御のデータとして使用する事が出来る。またこれによる修正値をバケット付ロープの軌道計算に入力することが出来る。
次に、バケット51を取付けたロープ50の水中の軌跡は計算及び海や水槽で研究された結果を以下説明する。
図13は、2次元プログラムによる解析結果を示すもので、バケット内鉱石充填率が0.5、船速0.5m/s、ロープ速度0.5m/s、潮流がないときの昇降ロープのカテナリー曲線であり、図13(a)は側面図、図13(b)は背面図である。引揚ロープ50aは遠くから引揚げられ、繰出ロープ50bは垂れ下っている。
背面から見ると、図13(b)に示すように、引揚ロープ50aと繰出ロープ50bは近接しており、からみ合いを生ずる危険性がある。
図14は、図13と同条件で潮流が横方向に0.5m/sの場合のロープ曲線を示すもので、図14(a)は側面図、図14(b)は背面図である。図14(b)に示すように、横方向の潮流によって、引揚ロープ50aと繰出ロープ50bとが横方向に分離されている。側面図では図13(a)と殆ど差がない曲線となっている。横方向の潮流が0.5m/s(船速と等しい速度)では繰出ロープ50bと引揚ロープ50aとの間の分離は充分で、揚降ロープ間のからみを防止出来ることを示している。
本発明では図14に示す潮流と同じ効果を持つように採鉱船10を船軸に直角な方向に運動させることにより、引揚ロープ50aと繰出ロープ50bとの間の間隔を開き、引揚ロープ50aと繰出ロープ50b相互のからみ合い事故を防止することが出来る。本発明による深海鉱物の採取では、このように海流や潮流等の影響によるロープのからみを防止することができる画期的な効果がある。
10 採鉱船
11 外舷
20 GPS信号受信機
30 外舷スラスタ
31 エンジン
32、33、34 伝導部
35 プロペラ
40 サイドスラスタ
41 貫通孔
50 エンドレスロープ
50a 引揚側ロープ
50b 繰出側ロープ
51 バケット
52、53 矢印
55 ボールローラ
56 モータ
57 軸受
58 支持材
60 櫓
62、63、64 シーブ
70 ロープ駆動機
72 水平多重車
80 引揚ロープ案内車
81 繰出ロープ案内車
82 鉛直軸
83 軸
84 背板
90 音響探知装置
91 ケーブル
92 マイクロホン
200 深海鉱物賦存区域
201 鉱石
202 回収鉱石
11 外舷
20 GPS信号受信機
30 外舷スラスタ
31 エンジン
32、33、34 伝導部
35 プロペラ
40 サイドスラスタ
41 貫通孔
50 エンドレスロープ
50a 引揚側ロープ
50b 繰出側ロープ
51 バケット
52、53 矢印
55 ボールローラ
56 モータ
57 軸受
58 支持材
60 櫓
62、63、64 シーブ
70 ロープ駆動機
72 水平多重車
80 引揚ロープ案内車
81 繰出ロープ案内車
82 鉛直軸
83 軸
84 背板
90 音響探知装置
91 ケーブル
92 マイクロホン
200 深海鉱物賦存区域
201 鉱石
202 回収鉱石
Claims (4)
- バケット付ロープを用いて深海鉱物を採取する方法において、洋上における採鉱船自身の鉱物賦存区域に対する位置を検知すると共に、前記ロープの繰出位置及び引揚位置におけるロープの鉛直傾斜角及び水平方向角を測定し、これらのデータからロープの着底点及び離底点を推定し、該着定点及び離底点が鉱床内にあると共に、昇降ロープのからみ合いを防止するように、採鉱船の運動を制御することを特徴とする深海鉱物の連続採取方法。
- バケットのドレッジ音を探知し、バケットの着底点と離底点の修正を前記採鉱船の運動の制御に加えることを特徴とする請求項1記載の深海鉱物の連続採取方法。
- バケット付ロープを用いて採鉱船により深海鉱物を採取する装置において、採鉱船の位置を検知する検知装置と、採鉱船のロープ繰出位置及び引揚位置におけるロープの鉛直傾斜角及び水平方向角を測定する装置と、ロープの着底点及び離底点を推定する計算装置と、該推定に基づき採鉱船の運動を制御する制御装置とを備えたことを特徴とする深海鉱物の連続採取装置。
- 前記検知装置はGPS装置であることを特徴とする請求項3記載の深海鉱物の連続採取装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007224474A JP2009057721A (ja) | 2007-08-30 | 2007-08-30 | 深海鉱物の連続採取方法およびその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007224474A JP2009057721A (ja) | 2007-08-30 | 2007-08-30 | 深海鉱物の連続採取方法およびその装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009057721A true JP2009057721A (ja) | 2009-03-19 |
Family
ID=40553719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007224474A Withdrawn JP2009057721A (ja) | 2007-08-30 | 2007-08-30 | 深海鉱物の連続採取方法およびその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009057721A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102140917A (zh) * | 2011-05-17 | 2011-08-03 | 中南大学 | 深海采矿升沉补偿模拟试验装置 |
| CN104110050A (zh) * | 2014-08-04 | 2014-10-22 | 武汉理工大学 | 基于数字信号处理器的挖泥船专用控制器 |
| CN114320302A (zh) * | 2021-12-31 | 2022-04-12 | 何清华 | 一种海底矿体采收设备 |
| CN115182730A (zh) * | 2022-06-30 | 2022-10-14 | 天津大学 | 一种双船形式的微能耗吊装深海采矿系统 |
| CN116717257A (zh) * | 2023-05-24 | 2023-09-08 | 中国船舶科学研究中心 | 一种用于深海采矿试验的矿区预制系统及预制方法 |
| CN120312228A (zh) * | 2025-05-28 | 2025-07-15 | 上海交通大学三亚崖州湾深海科技研究院 | 一种海底矿物和生物资源采集装置、设备及方法 |
-
2007
- 2007-08-30 JP JP2007224474A patent/JP2009057721A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102140917A (zh) * | 2011-05-17 | 2011-08-03 | 中南大学 | 深海采矿升沉补偿模拟试验装置 |
| CN104110050A (zh) * | 2014-08-04 | 2014-10-22 | 武汉理工大学 | 基于数字信号处理器的挖泥船专用控制器 |
| CN114320302A (zh) * | 2021-12-31 | 2022-04-12 | 何清华 | 一种海底矿体采收设备 |
| CN115182730A (zh) * | 2022-06-30 | 2022-10-14 | 天津大学 | 一种双船形式的微能耗吊装深海采矿系统 |
| CN116717257A (zh) * | 2023-05-24 | 2023-09-08 | 中国船舶科学研究中心 | 一种用于深海采矿试验的矿区预制系统及预制方法 |
| CN120312228A (zh) * | 2025-05-28 | 2025-07-15 | 上海交通大学三亚崖州湾深海科技研究院 | 一种海底矿物和生物资源采集装置、设备及方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109991669B (zh) | 一种无人船拖曳水下磁法探测系统 | |
| CN109460061B (zh) | 一种自主水下机器人和地质取样设备的并行作业方法 | |
| JP7245988B2 (ja) | 海底鉱物資源揚収装置 | |
| US9694885B2 (en) | Apparatus and method for control of seismic survey equipment | |
| KR101815064B1 (ko) | 부유식 구조물의 동적위치제어 시스템 및 방법 | |
| CN108008454B (zh) | 一种浮游式海底高精度瞬变电磁探测系统 | |
| JP2009057721A (ja) | 深海鉱物の連続採取方法およびその装置 | |
| JP5754581B2 (ja) | 海底鉱床の採鉱方法およびその採鉱ユニット | |
| EP2644781B1 (en) | Pumping means intended for being trailed by a trailing suction hopper dredger and trailing suction hopper dredger equipped with such pumping means | |
| US7942051B2 (en) | Method and device for survey of sea floor | |
| JP2013242265A (ja) | 水中浮遊式採泥装置 | |
| US20170139069A1 (en) | System and Method for Seismic Streamer Control | |
| CN113624211B (zh) | Ladcp与usbl组合观测装置及其使用方法 | |
| CN110239675B (zh) | 一种可实现低速、恒速拖带作业的科学考察船 | |
| EP3696078A1 (en) | A method and system for piloting an unmanned marine surface vessel | |
| JP5813090B2 (ja) | 位置取得装置、水中航走体、位置取得装置の運用方法及び水中航走体の運用方法 | |
| RU2375578C1 (ru) | Способ селективного отбора и предварительного обогащения железомарганцевых конкреций и устройство для его реализации | |
| CA2911840A1 (en) | Arctic seismic surveying operations | |
| US20090095208A1 (en) | Water drift compensation method and device | |
| Deepak et al. | Development and testing of underwater mining systems for long term operations using flexible riser concept | |
| CN110254676B (zh) | 一种利用dp协助科考船实现低速拖带作业的控制系统 | |
| CN113562119B (zh) | 一种测量深海剖面流的装置和方法 | |
| WO2015140526A1 (en) | Underwater platform | |
| JPH09250935A (ja) | 海底地盤調査方法 | |
| JP6926932B2 (ja) | 水中浮遊式発電装置の姿勢制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20101102 |