JP2009072006A - 誘導電動機の制御装置 - Google Patents
誘導電動機の制御装置 Download PDFInfo
- Publication number
- JP2009072006A JP2009072006A JP2007238845A JP2007238845A JP2009072006A JP 2009072006 A JP2009072006 A JP 2009072006A JP 2007238845 A JP2007238845 A JP 2007238845A JP 2007238845 A JP2007238845 A JP 2007238845A JP 2009072006 A JP2009072006 A JP 2009072006A
- Authority
- JP
- Japan
- Prior art keywords
- current
- magnetic flux
- flux direction
- induction motor
- command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Control Of Ac Motors In General (AREA)
Abstract
【解決手段】誘導電動機内部の磁束が電圧や電流の変化に対して一定であるという仮定に基づいて、電圧指令を生成する手段が、誘導電動機内部の磁束方向の励磁電流と前記磁束方向に直交するトルク電流の干渉を考慮して、指令値に追従するように電流制御を行う。
【選択図】図1
Description

図5において、後述するd軸電流制御手段13およびq軸電流制御手段14(一点差線で囲まれた部分)が本発明の特徴である電流制御を実施する手段である。ほかの構成については、一構成例を示すものであって、その構成および手段を限定するものではない。
前記d電流制御手段13において、比例演算器1301は、第1の減算器7から出力される前記励磁電流偏差ΔId’を入力とし、比例係数ωc*Tσを乗算して出力する。積分演算器1302は、第1の減算器7から出力される前記励磁電流偏差ΔId’を入力とし、積分係数ωcを乗算して、積分演算した結果を出力する。
前記q電流制御手段14において、比例演算器1401は、第2の減算器8から出力される前記トルク電流偏差ΔIq’を入力とし、比例係数ωc*Tσを乗算して出力する。積分演算器1402は、第2の減算器8から出力される前記トルク電流偏差ΔIq’を入力とし、積分係数ωcを乗算して、積分演算した結果を出力する。
第3実施例では、第2実施例におけるd軸電流制御手段13の後段に第8の加算器15を追加し、第1の励磁電流指令Idp*’と第2の励磁電流指令Idp**’を加算することで第3の励磁電流指令Idp***’を生成する。
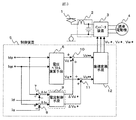
2 受電フィルタ
3 インバータ装置
4 誘導電動機
5 制御装置
6 電圧ベクトル演算手段
7 第1の減算器
8 第2の減算器
9 電流制御手段
10 第1の加算器
11 第2の加算器
12 座標変換手段
13 d軸電流制御手段
14 q軸電流制御手段
15 第8の加算器
16 第9の加算器
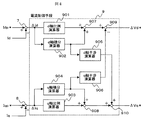
901 本発明の第1実施例におけるd軸比例演算器
902 本発明の第1実施例におけるd軸積分演算器
903 本発明の第1実施例におけるq軸比例演算器
904 本発明の第1実施例におけるq軸積分演算器
905 本発明の第1実施例におけるd軸干渉演算器
906 本発明の第1実施例におけるq軸干渉演算器
907 第3の加算器
908 第4の加算器
909 第3の減算器
910 第5の加算器
1301 d軸電流制御手段13における比例演算器
1302 d軸電流制御手段13における積分演算器
1303 第6の加算器
1401 q軸電流制御手段14における比例演算器
1402 q軸電流制御手段14における積分演算器
1403 第7の加算器
Ti 電動機定数に基づいた誘導電動機のd軸干渉項およびq軸干渉項の応答時定数
Tf 電動機定数に基づいた誘導電動機の磁束の応答時定数
Idp*、Idp*’ 第1の励磁電流指令
Iqp*、Iqp*’ 第1のトルク電流指令
Idp**’ 第2の励磁電流指令
Iqp**’ 第2のトルク電流指令
Idp***’ 第3の励磁電流指令
Iqp***’ 第3のトルク電流指令
Id、Id’ 励磁電流
Iq、Iq’ トルク電流
ΔId、ΔId’ 励磁電流偏差
ΔIq、ΔIq’ トルク電流偏差
Vu*、Vv*、Vw*、Vu*’、Vv*’、Vw*’ 交流電圧指令
Vd*、Vd*’ 第1のd軸電圧指令
Vq*、Vq*’ 第1のq軸電圧指令
ΔVd* 第2のd軸電圧指令
ΔVq* 第2のq軸電圧指令
Vd** 第3のd軸電圧指令
Vq** 第3のq軸電圧指令
Rσ 1次換算抵抗
lσ 1次換算漏れインダクタンス
ωinv 周波数指令
ωc 電流制御手段の応答周波数
Tσ 1次時定数
s ラプラス演算子
Claims (7)
- 受電フィルタを介して直流電源に接続され、少なくとも1台以上の誘導電動機を駆動するインバータ装置に対して電圧指令を生成する手段を有する誘導電動機の制御装置において、
前記電圧指令を生成する手段は、前記誘導電動機内部の磁束が一定であるという仮定に基づいて、前記誘導電動機内部の磁束方向の電流と前記磁束方向に直交する電流の干渉を考慮して、前記磁束方向の電流が前記磁束方向の電流に対する第1の指令値に追従するように、また、前記磁束方向に直交する電流が前記磁束方向に直交する電流に対する第1の指令値に追従するように、電流制御を行うことを特徴とする誘導電動機の制御装置。 - 請求項1に記載の誘導電動機の制御装置において、
前記電圧指令を生成する手段は、
電動機定数と前記誘導電動機内部の磁束方向の電流に対する第1の指令値と前記磁束方向に直交する電流に対する第1の指令値に基づいて前記インバータ装置に対する第1の電圧指令を生成する手段と、電動機定数と前記磁束方向の電流と前記磁束方向に直交する電流と前記磁束方向の電流に対する第1の指令値と前記磁束方向に直交する電流に対する第1の指令値に基づいて前記インバータ装置に対する第2の電圧指令を生成する手段とを有し、前記第1の電圧指令と前記第2の電圧指令に基づいて前記インバータ装置に対する電圧指令を生成することを特徴とする誘導電動機の制御装置。 - 請求項1に記載の誘導電動機の制御装置において、
前記電圧指令を生成する手段は、
電動機定数と前記誘導電動機内部の磁束方向の電流と前記磁束方向の電流に対する第1の指令値に基づいて前記磁束方向の電流に対する第2の指令値を生成する手段と、電動機定数と前記磁束方向に直交する電流と前記磁束方向に直交する電流に対する第1の指令値に基づいて前記磁束方向に直交する電流に対する第2の指令値を生成する手段と、
電動機定数と前記誘導電動機内部の磁束方向の電流に対する第2の指令値と前記磁束方向に直交する電流に対する第2の指令値に基づいて前記インバータ装置に対する第1の電圧指令を生成する手段とを有し、
前記第1の電圧指令に基づいて前記インバータ装置に対する電圧指令を生成することを特徴とする誘導電動機の制御装置。 - 請求項1に記載の誘導電動機の制御装置において、
前記電圧指令を生成する手段は、
電動機定数と前記誘導電動機内部の磁束方向の電流と前記磁束方向の電流に対する第1の指令値に基づいて前記磁束方向の電流に対する第2の指令値を生成する手段と、電動機定数と前記磁束方向に直交する電流と前記磁束方向に直交する電流に対する第1の指令値に基づいて前記磁束方向に直交する電流に対する第2の指令値を生成する手段と、
前記磁束方向の電流に対する第1の指令値と前記磁束方向の電流に対する第2の指令値に基づいて前記磁束方向の電流に対する第3の指令値を生成する手段と、前記磁束方向に直交する電流に対する第1の指令値と前記磁束方向に直交する電流に対する第2の指令値に基づいて前記磁束方向に直交する電流に対する第3の指令値を生成する手段と、
電動機定数と前記誘導電動機内部の磁束方向の電流に対する第3の指令値と前記磁束方向に直交する電流に対する第3の指令値に基づいて前記インバータ装置に対する第1の電圧指令を生成する手段とを有し、
前記第1の電圧指令に基づいて前記インバータ装置に対する電圧指令を生成することを特徴とする誘導電動機の制御装置。 - 請求項1ないし請求項4のいずれかに記載の誘導電動機の制御装置において、
前記電圧指令を生成する手段は、
電流制御の演算周期の間は前記誘導電動機内部の磁束が一定であるという仮定に基づいて、電流制御を行うことを特徴とする誘導電動機の制御装置。 - 請求項1ないし請求項5のいずれかに記載の誘導電動機の制御装置において、
前記電圧指令を生成する手段は、
電流制御の演算に用いる磁束を前記誘導電動機内部の磁束方向の電流に対する第1の指令値と電動機定数に基づいて計算することを特徴とする誘導電動機の制御装置。 - 請求項1ないし請求項6のいずれかに記載の誘導電動機の制御装置において、
前記電圧指令を生成する手段は、
前記誘導電動機の回転速度情報を得る手段と、前記誘導電動機に流入する電流を得る手段と、前記誘導電動機に流入する電流を前記誘導電動機内部の磁束方向の電流と前記磁束方向に直交する電流に座標変換する手段と、前記回転速度情報に基づいて前記インバータ装置に対する周波数指令を生成する手段と、前記インバータ装置に印加される直流電圧を得る手段と、前記インバータ装置を駆動する手段を有することを特徴とする誘導電動機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007238845A JP4884342B2 (ja) | 2007-09-14 | 2007-09-14 | 誘導電動機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007238845A JP4884342B2 (ja) | 2007-09-14 | 2007-09-14 | 誘導電動機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009072006A true JP2009072006A (ja) | 2009-04-02 |
| JP4884342B2 JP4884342B2 (ja) | 2012-02-29 |
Family
ID=40607684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007238845A Expired - Fee Related JP4884342B2 (ja) | 2007-09-14 | 2007-09-14 | 誘導電動機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4884342B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012130170A (ja) * | 2010-12-16 | 2012-07-05 | Hitachi Ltd | 制御装置 |
| JP2013207954A (ja) * | 2012-03-29 | 2013-10-07 | Hitachi Ltd | 誘導電動機の駆動装置 |
| JP2017060397A (ja) * | 2015-09-17 | 2017-03-23 | エルエス産電株式会社Lsis Co., Ltd. | 誘導電動機のパラメータ推定方法 |
| CN111937292A (zh) * | 2018-04-02 | 2020-11-13 | 三菱电机株式会社 | 电动机驱动装置以及空调装置 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0583976A (ja) * | 1991-09-18 | 1993-04-02 | Hitachi Ltd | 交流電動機制御装置及びこれを用いた電気車の制御装置 |
-
2007
- 2007-09-14 JP JP2007238845A patent/JP4884342B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0583976A (ja) * | 1991-09-18 | 1993-04-02 | Hitachi Ltd | 交流電動機制御装置及びこれを用いた電気車の制御装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012130170A (ja) * | 2010-12-16 | 2012-07-05 | Hitachi Ltd | 制御装置 |
| JP2013207954A (ja) * | 2012-03-29 | 2013-10-07 | Hitachi Ltd | 誘導電動機の駆動装置 |
| CN103368486A (zh) * | 2012-03-29 | 2013-10-23 | 株式会社日立制作所 | 感应电动机的驱动装置 |
| US9065368B2 (en) | 2012-03-29 | 2015-06-23 | Hitachi, Ltd. | Control method for induction motor |
| JP2017060397A (ja) * | 2015-09-17 | 2017-03-23 | エルエス産電株式会社Lsis Co., Ltd. | 誘導電動機のパラメータ推定方法 |
| US10230318B2 (en) | 2015-09-17 | 2019-03-12 | Lsis Co., Ltd. | Method for estimating parameter of induction machines |
| CN111937292A (zh) * | 2018-04-02 | 2020-11-13 | 三菱电机株式会社 | 电动机驱动装置以及空调装置 |
| CN111937292B (zh) * | 2018-04-02 | 2024-02-27 | 三菱电机株式会社 | 电动机驱动装置以及空调装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4884342B2 (ja) | 2012-02-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100655702B1 (ko) | 영구자석 동기 모터 제어방법 | |
| JP3928575B2 (ja) | モーター制御装置 | |
| JP6279211B2 (ja) | 電気自動車用同期モータの制御装置 | |
| JP4205157B1 (ja) | 電動機の制御装置 | |
| JP4480696B2 (ja) | モータ制御装置 | |
| JP5939316B2 (ja) | 誘導モータ制御装置および誘導モータ制御方法 | |
| JP7374813B2 (ja) | モータ制御装置 | |
| JP6075090B2 (ja) | モータ制御装置 | |
| JP7731950B2 (ja) | 同期機制御装置および同期機制御方法、並びに同期機駆動システム | |
| JP6115392B2 (ja) | モータ制御装置 | |
| JP7107385B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP6115250B2 (ja) | モータ制御装置 | |
| JP4910445B2 (ja) | Ipmモータのベクトル制御装置 | |
| JP2018057077A (ja) | 電動機制御装置およびドライブシステム | |
| JP6115251B2 (ja) | モータ制御装置 | |
| JP4884342B2 (ja) | 誘導電動機の制御装置 | |
| JP5788057B1 (ja) | 同期機制御装置 | |
| JP5726273B2 (ja) | 永久磁石状態推定機能を備えた同期機制御装置およびその方法 | |
| JP6626309B2 (ja) | 交流モータの鉄損を補償する制御装置 | |
| JP4522273B2 (ja) | モータ制御装置及びこれを有するモータ駆動システム | |
| JP2006197712A (ja) | 同期電動機の駆動システム及び同期電動機の駆動方法 | |
| JP2011067066A (ja) | 永久磁石形同期電動機の制御装置 | |
| JP7492477B2 (ja) | 同期機制御装置および同期機制御方法、並びに電気車 | |
| JPH1014299A (ja) | 同期電動機の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090420 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110802 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111108 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111206 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |