JP2009078355A - ワーク供給装置 - Google Patents
ワーク供給装置 Download PDFInfo
- Publication number
- JP2009078355A JP2009078355A JP2008333660A JP2008333660A JP2009078355A JP 2009078355 A JP2009078355 A JP 2009078355A JP 2008333660 A JP2008333660 A JP 2008333660A JP 2008333660 A JP2008333660 A JP 2008333660A JP 2009078355 A JP2009078355 A JP 2009078355A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- work
- magazine
- holding cylinder
- chuck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003860 storage Methods 0.000 claims description 8
- 210000000078 claw Anatomy 0.000 description 37
- 238000003825 pressing Methods 0.000 description 14
- 230000002093 peripheral effect Effects 0.000 description 10
- 230000004308 accommodation Effects 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 238000003754 machining Methods 0.000 description 8
- 230000001105 regulatory effect Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images










Landscapes
- Automatic Assembly (AREA)
- Turning (AREA)
Abstract
【課題】 ワークにドリル等の工具で貫通孔を形成する際にも次のワークに傷を付けたり変形させたりするおそれがなく、ワーク収容部を回転させることによる振動等の発生を防止できるワーク供給装置を提供する。
【解決手段】 複数のワークを同一の軸線上に整列して収容するワーク収容部(110,120)を有し、ワーク収容部(110,120)に収容されたワークを、作業機械の作業位置(A)に供給するワーク供給装置であって、ワーク収容部(110,120)を、作業位置(A)に位置決めされたワークwとこのワークwに隣接するワーク収容部(110,120)内のワークwとを離間させるように進退移動自在に設けた。
【選択図】 図1
Description
この構成によれば、作業位置で位置決めされたワークとワーク収容部に収容されたワークとを離間させることができる。
本発明の適用が可能な作業機械は、所定位置に位置決めしたワークに何らかの作業を行うものであればよく、各種加工機の他、組立機や検査機にも適用が可能である。加工機としては、主軸に把持したワークを加工する工作機械を挙げることができる。この場合は、主軸の回転によってワークを回転させても前記ワーク収容部を回転させることなく、ワークの加工を行うことができる。
[第一の実施形態]
図1は、本発明のワーク供給装置の第一の実施形態にかかり、その構成を説明する断面図である。
なお、以下の説明において「前」と記載するときには、図1の右方を指すものとして、「後」と記載するときには同左方を指すものとする。また、図においては、本発明のワーク供給装置以外の部分を仮想線で示すものとする。
保持筒400は、図示しない進退移動手段により、前後方向に進退移動自在である。前記進退移動手段としては、例えば、主軸を主軸台に対して進退移動させる公知のものを利用することができる。また、主軸台の後方に配置したバーフィーダ等の棒材送り機構を利用することも可能である。
また、保持筒400は、貫通孔500a内で主軸500と非接触状態で支持されている。そのため、ワーク加工の際に主軸500が回転しても、保持筒400は回転しない。もちろん、軸受等を用いて、保持筒400を主軸500に対して回転自在かつ進退移動自在に支持するようにしてもよい。
この実施形態においてワーク収容部は、マガジン110とガイドスリーブ120とから構成される。
マガジン110は、円筒状に形成され、同一形状のワークwを主軸軸線C上で多数配列して収容する。マガジン110の中心には、ワークwの外形形状及び寸法にほぼ一致する形状及び寸法のワーク収容孔110aが、マガジン110の前端面111から後端まで貫通形成されている。
ガイドスリーブ120に貫通形成されたガイド孔120aは、ワークwの外形形状及び外径寸法とほぼ同一の形状及び内径寸法を有し、かつ、マガジン110の前端から送り出されたワークwをコレットチャック220のチャック爪221まで確実に案内して受け渡すことができるように、その前端がチャック爪221に接している。
ガイドスリーブ120の後端は、フランジ121より後方に突出する筒状の凸部122として形成されている。一方、ワーク収容孔110aの前端は、この凸部122が挿入できる大径部110bとして形成されている。そして、マガジン110が保持筒400に挿入されたときに、凸部122がワーク収容孔110aの前端の大径部110bに挿入される。
マガジン110の前端には、保管の際や搬送の際にマガジン110の前端からワークwが脱落しないようにするためのストッパ130が設けられている。
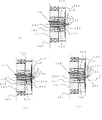
図2は、図1のワーク供給装置の詳細を説明する図で、図2(a)はマガジン110の前端部分の拡大図、図2(b)は図2(a)のマガジン110の前端部分を図中I方向から見た拡大図、図3(a)は、保持筒400内でマガジン110が固定されたときの状態を示す主要部の断面図、図3(b)は、図3(a)のII方向矢視図である。
ストッパ130は、第一の溝112及び第二の溝114の内部に取り付けられる。そのため、マガジン110に形成する第一の溝112及び第二の溝114の数は、マガジン110の前端に設けるストッパ130の数に応じて決定される。ストッパ130を複数設ける場合は、マガジン110の外周縁をストッパ130の数で均等分割した位置に第一の溝112及び第二の溝114を形成するのが好ましい。図示の例では、主軸軸線Cを中心とする対称位置に第一の溝112及び第二の溝114を形成し、二つのストッパ130をマガジン110の前端に設けている。
コレットチャック220のチャック爪221を開閉させる筒状のドローバ230は、図1に示すように、保持筒400内に挿入されている。マガジン110,ガイドスリーブ120及びコレットチャック220はドローバ230の貫通孔内に配置される。
ドローバ230は、図示しない公知の駆動機構の作用によって、主軸軸線Cと同方向に進退移動するようになっている。そして、ドローバ230が前進することで、コレットチャック220の前端が縮径し、チャック爪221がワークwを把持する。また、ドローバ230が後退することで、コレットチャック220の前端が元の径に復帰し、ワークwの把持を解除する。
マガジン110の後端には、図2に示すように、ワーク収容孔110aに配列して収容されたワークwをストッパ130の係合部132に向けて付勢するワーク付勢部140が設けられている。
このワーク付勢部140は、ワーク収容孔110aの後端に形成された大径部110c内に設けられている。ワーク付勢部140は、大径部110cに挿入された筒状の押圧部材141と、大径部110cの開口部分に螺着された筒状のキャップ142と、このキャップ142と押圧部材141との間に介在し、押圧部材141を前方に向けて付勢するコイルばね143とからなっている。
押圧部材141の外周面の途中部位には、径方向外側に張り出すフランジ141aが形成されていて、このフランジ141aがワーク収容孔110aと大径部110cとの境界部分に形成された段付き部に当接することで、押圧部材141の前進限界が決定される。
保持筒400に挿入されたマガジン110を後方から押すことで、マガジン110を保持筒400内で位置決め固定するためのマガジンプッシャ170は、図1に示すように、主軸軸線C上に配置された押圧部材171と、この押圧部材171を回転自在に支持するアーム172と、押圧部材171及びアーム172を主軸軸線C上で前後方向に進退移動させる図示しない駆動機構とから構成される。駆動機構としては、エアシリンダや油圧シリンダ等の流体圧シリンダ、ボールねじ・ナットとモータの組み合わせ、ソレノイド等の公知のものを用いることができる。
マガジン110が保持筒400内で位置決めして固定される際には、ストッパ130によるワークwの規制が解除されるので、マガジン110の前端からのワークwの送り出しが可能になる。ワークwの送り出しは、マガジン110内のワークwを後方から押すワークプッシャ160によって行われる。
ワークプッシャ160は、マガジン110の後方から、マガジンプッシャ170の押圧部材171及びワーク付勢部140を挿通してワーク収容孔110aに挿入される。ワークプッシャ160の進退移動は、図示しない駆動機構によって行われる。
ワーク押さえ150は、ストッパ130によるワークwの規制を解除する際に、先頭のワークw1を前方から押さえることで、マガジン110内のワークwが不用意に移動したり、倒れたりしないようにする。また、ワークプッシャ160と協働して、先頭のワークwをチャック爪511まで移動させ、チャック爪511に正確に把持させる。
ワーク押さえ150及びワークプッシャ160とともにワークwをチャック爪511まで送るワーク送り手段は、主軸軸線Cと同方向に移動自在で、かつ、精密な位置決めが可能であれば種々のものを用いることができる。例えば、主軸軸線C方向に移動自在な刃物台,対向主軸台又はテールストッカ等を挙げることができる。
次に、本発明の第二の実施形態を、図4を参照しながら説明する。
この実施形態のワーク供給装置は、ストッパの構成が異なるだけで、他の部分については第一の実施形態と同様である。そのため、以下の説明ではストッパ部分についてのみ説明し、その他の部分についての詳しい説明は省略する。
図4は本発明の第二の実施形態にかかり、(a)はストッパによってワークが規制された状態を、(b)はストッパによるワークの規制が解除された状態を示している。
この実施形態では、マガジン110の前端に、マガジン110の外周面からワーク収容孔110aまで貫通する溝115が形成されている。この溝115の壁面に、主軸軸線Cと直交する方向に軸135aが取り付けられ、この軸135aを支点とする爪135が回動自在に設けられている。
本発明の第三の実施形態を、図5を参照しながら説明する。
この実施形態においてマガジン110に収容されるワークw′は、図5(a)に示すように、外周縁の一部を切り欠いた略D字状のものである。
この場合は、図5(b)及び図5(c)に示すように、マガジン110内で主軸軸線Cの周りにワークw′が回転しないようにするために、ワーク収容孔110aの内周面に回り止めを設ける。この回り止めは、ワーク収容孔110aの内周面に形成され、ワーク収容孔110aの全長にわたって主軸軸線Cと同方向に延びる溝110dと、この溝110dに嵌入されたキー状の回り止め部材118とを有している。
なお、ワーク収容孔110aの内部にキー状の回り止め部材118を設けることで、マガジン110の重量バランスが変化し、マガジン110の重心が主軸軸線Cと一致しなくなる。そのため、保持筒400及びマガジン110を主軸500とともに回転させる場合において、マガジン110を主軸200とともに高速で回転させると、主軸200に振動が発生するおそれがある。そこで、回り止め部材118の材質としてマガジン110の材質よりも軽量のものを採用したり、回り止め部材118に孔や溝を設けたり、回り止め部材118と対称位置に重量バランスをとるための部材を設けたりする等して、マガジン110の重心を可能な限り主軸軸線C上又はその近傍に位置させるのが好ましい。
また、この実施形態では、回り止め部材118を設けた部位を避けてストッパ130を設けるが、マガジン110の重量バランスを考慮した位置にストッパ130を一つ又は複数設けるのが好ましい。
上記の実施形態では、マガジン110とは別体のガイドスリーブ120がコレットチャック220内に設けられ、マガジン110から送り出されたワークwがガイドスリーブ120によってチャック爪511まで案内,供給されるものとして説明した。
以下に説明する第四の実施形態では、マガジン310の前端がチャック爪221の直近に位置していて、マガジン330から送り出されたワークwがすぐにチャック爪511に受け渡されるようになっている。なお、以下の説明において、第一の実施形態と同一部位,同一部材には同一の符号を付して詳しい説明は省略する。
ワーク収容部としてのマガジン310の前端部分は、他の部分よりも径の小さい小径部310bとして形成されている。また、マガジン310の外周面には、前端面311から主軸軸線Cと同方向に延びる第一の溝312aと、この第一の溝312aの後端に位置し、第一の溝312aよりも浅い第二の溝312bと、第一の溝312aの前端で第一の溝312aとワーク収容孔110aとを連通状に連結する第三の溝314とが形成されている。
なお、ワークwの規制が解除されるときは、先の実施形態と同様に、最先端に位置するワークw1がワーク押さえ150(図1参照)によって押さえられているから、ワークwがマガジン310から脱落したり、倒れたりすることはない。
図8は、上記のワーク供給装置によるワーク供給の手順を説明する図である。
図8(a)に示すように、初期状態では、保持筒400は後退した位置にあって、保持筒400に収容されたコレットチャック220の前端(チャック爪221)と主軸500のチャック爪511とは離間している。この状態で、保持筒400にマガジン110を保持筒400の後端から挿入する。このとき、主軸500の前端に対面する位置に、ワーク押さえ150が待機している。
なお、マガジン110内のワークwは、ストッパ130とワーク付勢部140とによって保持されているので、マガジン110の保管の際、搬送の際及び保持筒400にマガジン110を挿入する際に、ワークwがマガジン110から脱落したり、マガジン110内で不用意に移動したり、倒れたりすることはない。
このとき、先に図3を参照しながら説明したように、ワーク収容孔110aの前端に形成された大径部110bにガイドスリーブ120の突部122が挿入されることで、ストッパ130によるワークwの規制が解除される。なお、先頭のワークw1がワーク押さえ150に当接しているので、ストッパ130による規制が解除されても、ワークwが不用意に移動したり倒れたりすることはない。
そして、この状態で、ワーク押さえ150で先頭のワークw1を押さえながら、ワークwをチャック爪511による把持位置まで移動させる。
加工終了後は、図11(a)に示すように、チャック爪511によるワークw1の把持解除に先立って、保持筒400が前進し、次回加工のワークwを加工の終了したワークw1に当接させる。次いで、ワーク押さえ150が前進して、加工が終了したワークw1に当接し、ワークw1を押さえる。
以後、図10(b)〜図11(c)の動作を繰り返す。
なお、上記の作用は、図6及び図7を参照しながら説明した第四の実施形態のマガジン310でも同じである。
また、ドリルでワークw1に貫通孔を形成する場合でも、保持筒400とともに次に加工するワークwを十分に後退させておくことで、ワークw1を突き抜けたドリルの先端が次のワークwに接触してワークwを傷つけたり、変形させたりするという不都合を防止できる。
上記の第一〜第四の実施形態では、ワークwの加工中は常にマガジンプッシャ170でマガジン110,310を前方に押して位置決め・固定を行っているが、保持筒400内でマガジン110,310の位置決め・固定を行うことができるのであれば、例えば保持筒400の後方にマガジン110,310を把持するチャックを設け、このチャックでマガジン110,310の位置決めと固定を行うようにしてもよい。
また、上記の説明では主軸の後方からマガジンを挿入するものとしているが、マガジンは主軸の先端から挿入するものであってもよい。また、上記の説明では主軸が水平方向の横型の工作機械(自動旋盤)を例に挙げて説明したが、主軸が立て方向の立て型の工作機械にも適用が可能である。
110:ワーク収容部
110a:貫通孔
111:前端面
120:ガイドスリーブ(ガイド)
121:フランジ
122:凸部(規制解除手段)
120a:ガイド孔
130:ストッパ
131:基部
140:ワーク付勢部
150:ワーク押さえ
160:ワークプッシャ
170:マガジンプッシャ
202:カバー
203:テーパ面
210:軸受
220:コレットチャック
221:チャック爪
230:ドローバ
400:保持筒
500:主軸
500a:主軸貫通孔
A:加工位置(作業位置)
T:工具
Claims (5)
- 複数のワークを同一の軸線上に整列して収容するワーク収容部を有し、前記ワーク収容部に収容されたワークを、作業機械の作業位置に供給するワーク供給装置であって、
前記ワーク収容部を、前記作業位置に位置決めされたワークとこのワークに隣接するワーク収容部内のワークとを離間させるように進退移動自在に設けたこと、
を特徴とするワーク供給装置。 - 前記ワーク収容部に収容されたワークをワーク収容部内に保持するように、前記ワークの移動を規制するワーク規制手段を設けたことを特徴とする請求項1に記載のワーク供給装置。
- 前記作業機械が筒状の主軸を有し、前記ワーク収容部が主軸の貫通孔に挿入されて配置されることを特徴とする請求項1又は2に記載のワーク供給装置。
- 前記主軸が前記作業機械に回転駆動自在に設けられ、前記ワーク収容部を、前記主軸の回転に対して固定状態で支持したことを特徴とする請求項3に記載のワーク供給装置。
- 前記作業機械が、前記ワーク収容部から供給されたワークを主軸で把持して加工を行う工作機械であることを特徴とする請求項3又は4に記載のワーク供給装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008333660A JP5090331B2 (ja) | 2008-12-26 | 2008-12-26 | ワーク供給装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008333660A JP5090331B2 (ja) | 2008-12-26 | 2008-12-26 | ワーク供給装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005141643A Division JP4616073B2 (ja) | 2005-05-13 | 2005-05-13 | ワーク供給装置及びワーク供給方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009078355A true JP2009078355A (ja) | 2009-04-16 |
| JP5090331B2 JP5090331B2 (ja) | 2012-12-05 |
Family
ID=40653496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008333660A Expired - Fee Related JP5090331B2 (ja) | 2008-12-26 | 2008-12-26 | ワーク供給装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5090331B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019042883A (ja) * | 2017-09-05 | 2019-03-22 | シチズン時計株式会社 | 工作機械の主軸 |
| CN116175120A (zh) * | 2023-02-10 | 2023-05-30 | 安费诺汽车连接系统(常州)有限公司 | 一种管簧组装机构 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04146003A (ja) * | 1990-10-08 | 1992-05-20 | Hitachi Seiki Co Ltd | 薄物ワーク用パーツフィーダ |
| JP2006315142A (ja) * | 2005-05-13 | 2006-11-24 | Citizen Watch Co Ltd | ワーク供給装置及びワーク供給方法 |
-
2008
- 2008-12-26 JP JP2008333660A patent/JP5090331B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04146003A (ja) * | 1990-10-08 | 1992-05-20 | Hitachi Seiki Co Ltd | 薄物ワーク用パーツフィーダ |
| JP2006315142A (ja) * | 2005-05-13 | 2006-11-24 | Citizen Watch Co Ltd | ワーク供給装置及びワーク供給方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019042883A (ja) * | 2017-09-05 | 2019-03-22 | シチズン時計株式会社 | 工作機械の主軸 |
| CN116175120A (zh) * | 2023-02-10 | 2023-05-30 | 安费诺汽车连接系统(常州)有限公司 | 一种管簧组装机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5090331B2 (ja) | 2012-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5714556B2 (ja) | 穿孔装置のクランプ装置及びエア駆動ドリル装置 | |
| KR101620327B1 (ko) | Cnc 선반용 공작물 척킹 장치 | |
| US6883407B2 (en) | Expanding collet assembly for pick-off spindle | |
| CN202037349U (zh) | 自动车床的夹紧夹头 | |
| US3927583A (en) | Apparatus for loading a workpiece into a rotating collet or chuck | |
| JP7075638B1 (ja) | 主軸装置及び主軸装置を搭載した工作機械 | |
| JPH01264734A (ja) | 工作機械の自動工具交換装置 | |
| JP4616073B2 (ja) | ワーク供給装置及びワーク供給方法 | |
| JP5090331B2 (ja) | ワーク供給装置 | |
| CN102059569A (zh) | 自动车床的夹紧夹头 | |
| WO2010109765A1 (ja) | ワーク供給装置及びこのワーク供給装置を備えた工作機械 | |
| JP4922476B2 (ja) | 工作機械の主軸 | |
| JP2011255460A (ja) | 工作機械 | |
| JP5148908B2 (ja) | チャック装置 | |
| JP5070096B2 (ja) | ワーク排出装置及びワーク排出装置を備えた工作機械 | |
| JP2001179512A (ja) | 筒状ワークの内径及び両端面の加工装置、筒状ワーク把持用チャック | |
| JP4362331B2 (ja) | 棒材供給機 | |
| JP4847386B2 (ja) | 棒材移送装置及び工作機械 | |
| JPS63212438A (ja) | 自動工具交換装置 | |
| JP5292154B2 (ja) | ワーク供給装置及びこのワーク供給装置を備えた工作機械 | |
| TW201711772A (zh) | 材料導引裝置以及具備該材料導引裝置的工具機 | |
| JP4728117B2 (ja) | ワーク保持管、工作機械およびワークの加工方法 | |
| JP6696713B2 (ja) | 自動旋盤装置 | |
| JPH067843Y2 (ja) | 短尺鋼管加工用センタ保持具の自動交換装置 | |
| JP4892124B2 (ja) | 工作機械のチャック開閉装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110913 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120904 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120912 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150921 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5090331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |