JP2009085672A - 剪断力検出装置 - Google Patents
剪断力検出装置 Download PDFInfo
- Publication number
- JP2009085672A JP2009085672A JP2007253483A JP2007253483A JP2009085672A JP 2009085672 A JP2009085672 A JP 2009085672A JP 2007253483 A JP2007253483 A JP 2007253483A JP 2007253483 A JP2007253483 A JP 2007253483A JP 2009085672 A JP2009085672 A JP 2009085672A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- sensitive
- quantity sensor
- mechanical quantity
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
【解決手段】第1アーム(12)と第2アーム(21)との間に挟持され、第1アームおよび第2アームと略直交する方向を感応方向とする圧縮力に感応する第1力学量センサ素子(S2)とからなる。これにより、感応方向に相対変位し得る平行に離間した被測定面間に生じ得る剪断力を精度良く測定できる。
【選択図】図1
Description
圧力抵抗効果とは、圧縮応力、引張応力、剪断応力、静水圧等がある材料に印加されたときに、その材料の電気抵抗が変化する現象のことであり、その材料を圧力抵抗効果材料という。このような圧力抵抗効果材料を用いた力学量センサ素子の一例およびその利用例を下記特許文献にそれぞれ示す。
(1)すなわち、本発明の剪断力検出装置は、第1ベースと該第1ベースから直角方向へ延び該第1ベースと一体的に可動し得る第1アームとからなる第1部材と、該第1ベースと平行に離間して配設される第2ベースと該第2ベースから直角方向へ該第1アームに対峙する向きに延び該第2ベースと一体的に可動し得る第2アームとからなる第2部材と、
該第1アームと該第2アームとの間に挟持され、該第1アームおよび該第2アームと略直交する方向を感応方向とする圧縮力に感応する第1力学量センサ素子とからなり、
前記感応方向に相対変位し得る平行に離間した被測定面間に生じ得る剪断力を測定できることを特徴とする。
これにより、測定対象に垂直力が作用等して、剪断力以外に垂直力が力学量センサ素子に作用する場合であっても、力学量センサ素子はその影響をほとんど受けずに、剪断力に相当する出力を正確に行い得る。すなわち、測定対象等に応じた個別的な補正等を行うことなく、剪断力だけを正確に計測できる。しかもこの場合、構造上も計測システム上もシンプルにできるため、本発明の剪断力検出装置の汎用性を一層高め得る。
〈剪断力検出装置の構造〉
(1)本発明の剪断力検出装置は、基本的に、第1部材と第2部材と力学量センサ素子とからなる。
第1部材は第1ベースと第1アームとからなり、第2部材は第2ベースと第2アームとからなる。第1ベースと第1アームは、ほぼ直交している限り、一体品でも、ねじや圧入等によって固定した組立品でも良い。また、それらの断面形状は、板状、角柱状、多角形状等、なんでも良い。第2ベースと第2アームについても同様である。
また、測定対象の形状や被測定面の状態等によっては、第1ベースや第2ベースにアタッチメントを設けて、本発明の剪断力検出装置の取付けを容易にしても良い。
このように構成することで、簡易な構造でありながら、測定対象に生じる剪断力の向きが感応方向内で変化しても、第1力学量センサ素子または第2力学量センサ素子の少なくとも一方により剪断力が検出される。このため、剪断力の安定した検出が可能となり、剪断力検出装置の汎用性も高まる。
特に、前述したように、本発明の剪断力検出装置の第1部材が第1アームおよび第3アームを備える場合に、第1力学量センサ素子が第1アームと第2アームにより、第2力学量センサ素子が第3アームと第2アームとにより、予圧が印加された状態にあると一層好適である。
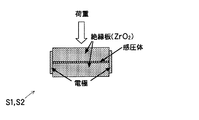
(1)本発明では、力学量センサ素子の種類や形式等は拘らないが、例えば、力学量センサ素子は、特定方向の圧縮力の印加により電気的特性を変化させ得る感圧体と、該感圧体の該特定方向の両面側に配設された電気的絶縁性を有する絶縁体と、該感圧体から印加される圧縮力に応じて変化する電気信号を取出す電極とからなると好適である。
また前述したように、力学量センサ素子が感応方向にのみ感応し、感応方向に直交する方向では実質的に感応しないと、被測定面の剪断力を正確に効率よく検出できて好ましい。
この圧力抵抗効果材料として、例えば、酸化ルテニウム(RuO2)、ルテニウム酸鉛またはペロブスカイト型複合酸化物(La1-XSrXMnO3:0<x<0.4)がある。これらを1種類で用いても、2種以上を組み合わせて用いても良い。
〈剪断力検出装置〉
(1)構造
図1に本発明の一実施例である剪断力検出装置Mを示す。この剪断力検出装置Mは、台座1(第1部材)と台座2(第2部材)と力学量センサ素子S2(第1力学量センサ素子)および力学量センサ素子S1(第2力学量センサ素子)とからなる。
力学量センサ素子S1は、台座1のアーム12と台座2のアーム22の間にシム7を介して挟持されている。また、力学量センサ素子S2は、台座1のアーム13と台座2のアーム22の間にシム8を介して挟持されている。
この剪断力検出装置Mで用いた力学量センサ素子S1、S2の詳細な構造を図2に示した。力学量センサ素子S1、S2は、感圧体とその両側を覆う絶縁体と感圧体の両端側に設けた電極とからなる。この感圧体は、圧力抵抗効果材料であるRuO2粒子をマトリックスであるガラス(電気絶縁性材料)中に分散させたものである。絶縁体はZrO2からなる。電極は銀である。この電極が図示しないオシロスコープ等の計測システムに接続される。これにより、図2に示した方向の荷重を力学量センサ素子へ印加させたとき、感圧体の抵抗値が変化して、その変化量から印加した荷重が計測される。なお、参考までに、本実施例で用いた力学量センサ素子S1、S2の単体での出力特性(荷重特性)の一例を図3に示す。ちなみに、この力学量センサ素子S1、S2は、2x2x2.5(mm)の角柱状である。
力学量センサ素子S1、S2は、感圧体と絶縁体とを焼成により一体形成してなる。この作製方法につき概説しておく。
先ず、絶縁体として、ジルコニア板(東ソー株式会社製)を2枚準備し、感圧体の材料として、粒径0.2〜5μmのRuO2の粒子とガラスとを含有する抵抗ペースト(ESL社製の3414A)を準備する。
さらに、力学量センサ素子の感圧体2が露出した一対の側面に、銀ペースト(昭栄化学工業株式会社製)を塗布し、温度850℃にて10分間加熱した。これにより、感圧体に銀ペーストが焼き付けられ、感圧体を挟む一対の電極が形成された。
以上のようにして、力学量センサ素子S1、S2が得られた。
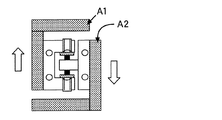
(1)上記の剪断力検出装置Mに、取付孔111、112および取付孔211、212を用いて、試験的な測定対象となるアタッチメントA1、A2を取付けた様子を図4および図5に示す。図4は、剪断力検出装置Mに剪断荷重が作用するようにした様子を示す。図5は、剪断力検出装置Mに垂直荷重が作用するようにした様子を示す。
これら各場合について、剪断力検出装置Mに印加した入力荷重と、力学量センサ素子S1、S2の出力荷重(センサ出力荷重FS1、FS2)との関係をオートグラフで求めた。また、各センサ出力荷重から算出した出力荷重(Ft=FS1−FS2)と入力荷重との関係も求めた。これらの結果を図6〜図9にそれぞれ示す。
いうまでもないが、力学量センサ素子S1、S2から得られるのは抵抗値の変化(電気信号)である。従って、力学量センサ素子S1、S2から出力された電気信号と入力荷重との対応関係は、予めキャリブレーションして求めておいた(図3)。
このように、本発明にかかる剪断力検出装置によれば、垂直荷重等の影響を実質的に受けることなく、剪断荷重のみを正確に計測できることが確認された。
2 台座(第2部材)
11、21 ベース
12、13、21 アーム
S1、S2 力学量センサ素子
M 剪断力検出装置
Claims (7)
- 第1ベースと該第1ベースから直角方向へ延び該第1ベースと一体的に可動し得る第1アームとからなる第1部材と、
該第1ベースと平行に離間して配設される第2ベースと該第2ベースから直角方向へ該第1アームに対峙する向きに延び該第2ベースと一体的に可動し得る第2アームとからなる第2部材と、
該第1アームと該第2アームとの間に挟持され、該第1アームおよび該第2アームと略直交する方向を感応方向とする圧縮力に感応する第1力学量センサ素子とからなり、
前記感応方向に相対変位し得る平行に離間した被測定面間に生じ得る剪断力を測定できることを特徴とする剪断力検出装置。 - 前記第1部材は、さらに、前記第1ベースから延びて該第1ベースと一体的に可動すると共に前記第1アームと平行に離間して対峙する第3アームを有し、
前記第2部材の第2アームは、該第1アームと該第3アームとの間に配置され、
さらに、該第3アームと該第2アームとの間に挟持され前記感応方向の圧縮力に感応する第2力学量センサ素子を備える請求項1に記載の剪断力検出装置。 - 前記力学量センサ素子は、予圧が印加された状態にある請求項1または2に記載の剪断力検出装置。
- 前記力学量センサ素子は、前記感応方向にのみ感応し、該感応方向に直交する方向には実質的に感応しない請求項1または2に記載の剪断力検出装置。
- 前記力学量センサ素子は、前記特定方向の圧縮力の印加により電気的特性を変化させ得る感圧体と、
該感圧体の該特定方向の両面側に配設された電気的絶縁性を有する絶縁体と、
印加される圧縮力に応じて変化する電気信号を該感圧体から取出す電極とからなる請求項1〜4のいずれかに記載の剪断力検出装置。 - 前記感圧体は、マトリックスとなる電気絶縁性材料と、
該電気絶縁性材料中に分散して導電性を有する圧力抵抗効果材料とからなる請求項5に記載の剪断力検出装置。 - 前記圧力抵抗効果材料は、酸化ルテニウム(RuO2)またはペロブスカイト型複合酸化物(La1-XSrXMnO3:0<x<0.4)からなる請求項6に記載の剪断力検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007253483A JP5034832B2 (ja) | 2007-09-28 | 2007-09-28 | 剪断力検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007253483A JP5034832B2 (ja) | 2007-09-28 | 2007-09-28 | 剪断力検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009085672A true JP2009085672A (ja) | 2009-04-23 |
| JP5034832B2 JP5034832B2 (ja) | 2012-09-26 |
Family
ID=40659301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007253483A Expired - Fee Related JP5034832B2 (ja) | 2007-09-28 | 2007-09-28 | 剪断力検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5034832B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106680114A (zh) * | 2017-01-19 | 2017-05-17 | 苏州大学 | 软组织各向异性剪切力学特性测试仪 |
| CN108709674A (zh) * | 2018-08-12 | 2018-10-26 | 西南大学 | 一种拖拉机阻力检测结构 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS51124481A (en) * | 1975-04-23 | 1976-10-29 | Kajima Corp | Frictional force measuring device to directly detect friction force wo rking on contact surface of bodies |
| JPS58162826A (ja) * | 1982-03-23 | 1983-09-27 | Kyowa Dengiyou:Kk | 摩擦応力計 |
| JPS59107231A (ja) * | 1982-12-10 | 1984-06-21 | Kajima Corp | 周面摩擦計 |
| JPS63124636U (ja) * | 1987-02-06 | 1988-08-15 | ||
| JPH0843215A (ja) * | 1994-08-01 | 1996-02-16 | Nippon Denshi Kogyo Kk | 車両の応力測定装置 |
| JP2002202209A (ja) * | 2000-11-06 | 2002-07-19 | Toyota Central Res & Dev Lab Inc | 力学量センサ素子構造 |
| JP2005172793A (ja) * | 2003-11-19 | 2005-06-30 | Toyota Central Res & Dev Lab Inc | 力学量センサ素子 |
-
2007
- 2007-09-28 JP JP2007253483A patent/JP5034832B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS51124481A (en) * | 1975-04-23 | 1976-10-29 | Kajima Corp | Frictional force measuring device to directly detect friction force wo rking on contact surface of bodies |
| JPS58162826A (ja) * | 1982-03-23 | 1983-09-27 | Kyowa Dengiyou:Kk | 摩擦応力計 |
| JPS59107231A (ja) * | 1982-12-10 | 1984-06-21 | Kajima Corp | 周面摩擦計 |
| JPS63124636U (ja) * | 1987-02-06 | 1988-08-15 | ||
| JPH0843215A (ja) * | 1994-08-01 | 1996-02-16 | Nippon Denshi Kogyo Kk | 車両の応力測定装置 |
| JP2002202209A (ja) * | 2000-11-06 | 2002-07-19 | Toyota Central Res & Dev Lab Inc | 力学量センサ素子構造 |
| JP2005172793A (ja) * | 2003-11-19 | 2005-06-30 | Toyota Central Res & Dev Lab Inc | 力学量センサ素子 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106680114A (zh) * | 2017-01-19 | 2017-05-17 | 苏州大学 | 软组织各向异性剪切力学特性测试仪 |
| CN108709674A (zh) * | 2018-08-12 | 2018-10-26 | 西南大学 | 一种拖拉机阻力检测结构 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5034832B2 (ja) | 2012-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4311980A (en) | Device for pressure measurement using a resistor strain gauge | |
| CN103748446B (zh) | 用于测量压力和/或作用力的传感器 | |
| US8042413B2 (en) | Transverse force measurement | |
| US7441467B2 (en) | Compression strain sensor | |
| CN103197101A (zh) | 非等截面悬臂梁压电式加速度传感器 | |
| US7441466B2 (en) | Weight sensor | |
| US20190186983A1 (en) | WIM Sensor and Method for Producing the WIM Sensor | |
| JP2005172793A (ja) | 力学量センサ素子 | |
| CN113302414B (zh) | 用于轴承的传感支承装置 | |
| JP5034832B2 (ja) | 剪断力検出装置 | |
| JP4605232B2 (ja) | 荷重センサ及びその製造方法 | |
| Qandil et al. | Considerations in the design and manufacturing of a load cell for measuring dynamic compressive loads | |
| JP2006226858A (ja) | 変動荷重センサ及びこれを用いた触覚センサ | |
| JPS5844323A (ja) | 圧力センサ | |
| CN103995151A (zh) | 复合八梁高频响加速度传感器芯片 | |
| US9885624B2 (en) | Strain sensor, and load detection device using same | |
| JP4901533B2 (ja) | 力センサ、荷重検出装置及び形状測定装置 | |
| CN103995149B (zh) | 孔缝八梁式加速度传感器芯片 | |
| JP2523772B2 (ja) | クリップ型容量ひずみゲ―ジ | |
| JPS6212458B2 (ja) | ||
| Zymelka et al. | Fabrication Process and Evaluation of Printed Strain Sensors for Detection of Maximum Strain Direction | |
| CN1133872C (zh) | 力传感器 | |
| CN223597045U (zh) | 一种混合应变片 | |
| JPH0654274B2 (ja) | 半導体圧力変換器 | |
| JP4940708B2 (ja) | 荷重センサ付きクランプボルト |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20100715 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100715 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100818 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120605 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120618 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150713 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150713 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |