JP2009095933A - 車両の転倒防止装置および脚車輪型ロボット - Google Patents
車両の転倒防止装置および脚車輪型ロボット Download PDFInfo
- Publication number
- JP2009095933A JP2009095933A JP2007270135A JP2007270135A JP2009095933A JP 2009095933 A JP2009095933 A JP 2009095933A JP 2007270135 A JP2007270135 A JP 2007270135A JP 2007270135 A JP2007270135 A JP 2007270135A JP 2009095933 A JP2009095933 A JP 2009095933A
- Authority
- JP
- Japan
- Prior art keywords
- leg
- control
- acceleration
- wheel
- pitch angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Manipulator (AREA)
Abstract
【課題】 減速時または加速時の車両の転倒を防止するのに好適な車両の転倒防止装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10にピッチ軸回りの自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、ピッチ軸回りの自由度の範囲で脚部12を駆動するための動力を付与する関節モータ40とを備え、脚車輪型ロボット100の進行方向の加速度を検出し、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように、検出した加速度に基づいて関節モータ40を制御する。
【選択図】図5
【解決手段】 脚車輪型ロボット100は、基体10と、基体10にピッチ軸回りの自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、ピッチ軸回りの自由度の範囲で脚部12を駆動するための動力を付与する関節モータ40とを備え、脚車輪型ロボット100の進行方向の加速度を検出し、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように、検出した加速度に基づいて関節モータ40を制御する。
【選択図】図5
Description
本発明は、車両の転倒を防止する装置および段差を乗り越えて移動できる脚車輪型ロボットに係り、特に、減速時または加速時の車両の転倒を防止するのに好適な車両の転倒防止装置および脚車輪型ロボットに関する。
ロボットの移動機構は、車輪型、クローラ型、脚型またはこれらを組み合わせた機構に分類される。一般に、車輪型ロボットは、平地での移動性は高いが、段差への適応性が低いという問題がある。また、クローラ型ロボットは、不整地に適し、多少の段差であれば乗り越えられるが、積極的な重心移動ができないために急な階段への適応性が低く、平地における移動性が車輪型ロボットより低いという問題があった。また、脚型ロボットは、階段への適応性が最も優れているが、平地での移動性が極端に低いという問題がある。
車輪型、クローラ型および脚型の問題を解決するため、脚型と車輪型を組み合わせた脚車輪型ロボットが提案されている。脚車輪型ロボットとしては、例えば、特許文献1記載の技術が知られている。
特許文献1には、サーボモータによって駆動される4本の脚部を自在に駆動しての歩行移動と、4本の脚部の内の後ろ側の2本の脚部に備えられた2つの駆動輪と、前側の2本の脚部に備えられた2つの従動輪とによる車輪移動と、さらに歩行移動と車輪移動を組み合わせたハイブリッド移動を行う脚式移動ロボット装置が開示されている(同文献〔0123〕および図31(a))。
特開2004−34169号公報
特許文献1には、サーボモータによって駆動される4本の脚部を自在に駆動しての歩行移動と、4本の脚部の内の後ろ側の2本の脚部に備えられた2つの駆動輪と、前側の2本の脚部に備えられた2つの従動輪とによる車輪移動と、さらに歩行移動と車輪移動を組み合わせたハイブリッド移動を行う脚式移動ロボット装置が開示されている(同文献〔0123〕および図31(a))。
このように、脚車輪型ロボットは、脚部を折り曲げる構造となっているので、通常の車輪型ロボットと比較すると重心が高くなる傾向にある。したがって、重心の高さと、減速時または加速時の加速度との関係によっては転倒の可能性がある。
図11は、脚車輪型ロボットの走行姿勢における減速モデルを示す図である。
図11に示すように、脚車輪型ロボットの質量をM(図11のモデルでは、重心点に質量が集中していると仮定)、前輪の床反力をNf、後輪の床反力をNb、ホイールベースをWb、重心の高さをH、進行方向の加速度をaとすると、垂直方向の力のつり合いから下式(1)が得られる。
図11は、脚車輪型ロボットの走行姿勢における減速モデルを示す図である。
図11に示すように、脚車輪型ロボットの質量をM(図11のモデルでは、重心点に質量が集中していると仮定)、前輪の床反力をNf、後輪の床反力をNb、ホイールベースをWb、重心の高さをH、進行方向の加速度をaとすると、垂直方向の力のつり合いから下式(1)が得られる。
また、重心の床面への投影点まわりのモーメントのつり合いから下式(2)が得られる。

図11のモデルにおいて、Nb=0のとき、後輪が浮く状態となる。
Nb=0を上式(1)に代入すると、Mg=Nfとなり、これを上式(2)に代入すると、−Ma・H−Mg・Wb/2=0となる。これにより、下式(3)が得られる。
Nb=0を上式(1)に代入すると、Mg=Nfとなり、これを上式(2)に代入すると、−Ma・H−Mg・Wb/2=0となる。これにより、下式(3)が得られる。
図12は、進行方向の加速度の変化に対して、後輪が浮上する重心の高さの変化を示すグラフである。
上式(3)においてWb=350[mm]とすると、図12に示すような変化曲線が得られる。転倒を防止するためには、加速度が大きいほど重心を低くしなければならないことが分かる。
上式(3)においてWb=350[mm]とすると、図12に示すような変化曲線が得られる。転倒を防止するためには、加速度が大きいほど重心を低くしなければならないことが分かる。
例えば、4[km/m]での走行から0.5[s]で停止することを考えると、a=-2.22[m/s2]である。このとき、後輪が浮上する重心の高さ(以下、許容重心高さという。)はH=772.5[mm]であり、これよりも重心が高いと転倒する可能性がある。
このことは、減速時に限らず加速時にも同様の問題が、また、脚車輪型ロボットに限らず一般の車両にも同様の問題が想定される。
このことは、減速時に限らず加速時にも同様の問題が、また、脚車輪型ロボットに限らず一般の車両にも同様の問題が想定される。
そこで、本発明は、このような従来の技術の有する未解決の課題に着目してなされたものであって、減速時または加速時の車両の転倒を防止するのに好適な車両の転倒防止装置および脚車輪型ロボットを提供することを目的としている。
〔発明1〕 上記目的を達成するために、発明1の車両の転倒防止装置は、減速時または加速時の車両の転倒を防止する車両の転倒防止装置であって、前記車両の進行方向の加速度を検出する加速度検出手段と、前記車両のピッチ角を調整するピッチ角調整手段と、前記車両のピッチ角が、前記加速度の方向に前記車両が傾倒する向きで、かつ、前記加速度による前記車両の転倒を回避するために必要な大きさとなるように、前記加速度検出手段の検出結果に基づいて前記ピッチ角調整手段を制御する制御手段とを備える。
このような構成であれば、減速時または加速時は進行方向の加速度が発生するので、加速度検出手段により、進行方向の加速度が検出される。そして、制御手段により、車両のピッチ角が、加速度の方向に車両が傾倒する向きで、かつ、加速度による車両の転倒を回避するために必要な大きさとなるように、加速度検出手段の検出結果に基づいてピッチ角調整手段が制御される。その結果、ピッチ角調整手段により、車両のピッチ角が調整される。これにより、減速時または加速時に車両が転倒する可能性を低減することができる。
ここで、進行方向の加速度とは、車両の進行方向またはその逆向きに発生する加速度をいう。例えば、車両が前後方向に進行する場合は車両の前後方向をいい、車両が横方向に進行する場合は車両の横方向をいう。
また、加速度の方向に車両が傾倒する向きとは、例えば、車両が前方に進行する場合、減速時は後傾姿勢となる向きをいい、加速時は前傾姿勢となる向きをいう。
また、加速度の方向に車両が傾倒する向きとは、例えば、車両が前方に進行する場合、減速時は後傾姿勢となる向きをいい、加速時は前傾姿勢となる向きをいう。
〔発明2〕 一方、上記目的を達成するために、発明2の脚車輪型ロボットは、基体と、前記基体に対して少なくともピッチ軸回りの自由度を有して連結された脚部と、前記脚部に回転可能に設けられた車輪と、前記ピッチ軸回りの自由度の範囲で前記脚部を駆動するための動力を付与するアクチュエータと、前記アクチュエータを制御する制御手段とを備え、前記脚部の駆動および前記車輪の回転により移動する脚車輪型ロボットであって、当該脚車輪型ロボットの進行方向の加速度を検出する加速度検出手段を備え、前記制御手段は、当該脚車輪型ロボットのピッチ角が、前記加速度の方向に当該脚車輪型ロボットが傾倒する向きで、かつ、前記加速度による当該脚車輪型ロボットの転倒を回避するために必要な大きさとなるように、前記加速度検出手段の検出結果に基づいて前記アクチュエータを制御する。
このような構成であれば、平地では、車輪走行で移動することができる。したがって、車輪型ロボットと同様に平地での移動性が高い。このとき、減速時または加速時は進行方向の加速度が発生するので、加速度検出手段により、進行方向の加速度が検出される。そして、制御手段により、脚車輪型ロボットのピッチ角が、加速度の方向に脚車輪型ロボットが傾倒する向きで、かつ、加速度による脚車輪型ロボットの転倒を回避するために必要な大きさとなるように、加速度検出手段の検出結果に基づいてアクチュエータが制御される。その結果、アクチュエータにより、脚車輪型ロボットのピッチ角が調整される。これにより、減速時または加速時に脚車輪型ロボットが転倒する可能性を低減することができる。
また、段差等の障害物が存在するところでは、制御手段により、アクチュエータを用いて脚部の駆動制御が行われる。アクチュエータが駆動すると、脚部に動力が付与され、ピッチ軸回りの自由度の範囲で脚部が駆動し、段差を乗り越えることができる。したがって、脚型ロボットと同様に段差への適応性が高い。
ここで、進行方向の加速度とは、脚車輪型ロボットの進行方向またはその逆向きに発生する加速度をいう。例えば、脚車輪型ロボットが前後方向に進行する場合は脚車輪型ロボットの前後方向をいい、脚車輪型ロボットが横方向に進行する場合は脚車輪型ロボットの横方向をいう。
また、加速度の方向に脚車輪型ロボットが傾倒する向きとは、例えば、脚車輪型ロボットが前方に進行する場合、減速時は後傾姿勢となる向きをいい、加速時は前傾姿勢となる向きをいう。
ここで、進行方向の加速度とは、脚車輪型ロボットの進行方向またはその逆向きに発生する加速度をいう。例えば、脚車輪型ロボットが前後方向に進行する場合は脚車輪型ロボットの前後方向をいい、脚車輪型ロボットが横方向に進行する場合は脚車輪型ロボットの横方向をいう。
また、加速度の方向に脚車輪型ロボットが傾倒する向きとは、例えば、脚車輪型ロボットが前方に進行する場合、減速時は後傾姿勢となる向きをいい、加速時は前傾姿勢となる向きをいう。
〔発明3〕 さらに、発明3の脚車輪型ロボットは、発明2の脚車輪型ロボットにおいて、複数の前記脚部と、前記各脚部に回転可能に設けられた複数の前記車輪とを備え、前記制御手段は、当該脚車輪型ロボットのピッチ角が、前記加速度の方向に当該脚車輪型ロボットが傾倒する向きで、かつ、前記加速度による当該脚車輪型ロボットの転倒を回避するために必要な大きさとなるように前記アクチュエータを制御するピッチ角制御、または、当該脚車輪型ロボットの重心が、前記加速度による当該脚車輪型ロボットの転倒を回避するために必要な高さとなるように前記アクチュエータを制御する高さ制御を前記加速度検出手段の検出結果に基づいて行う。
このような構成であれば、制御手段により、加速度検出手段の検出結果に基づいてピッチ角制御または高さ制御が行われる。ピッチ角制御では、脚車輪型ロボットのピッチ角が、加速度の方向に脚車輪型ロボットが傾倒する向きで、かつ、加速度による脚車輪型ロボットの転倒を回避するために必要な大きさとなるようにアクチュエータが制御される。一方、高さ制御では、脚車輪型ロボットの重心が、加速度による脚車輪型ロボットの転倒を回避するために必要な高さとなるようにアクチュエータが制御される。
〔発明4〕 さらに、発明4の脚車輪型ロボットは、発明3の脚車輪型ロボットにおいて、前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御により転倒を回避できるが前記高さ制御では転倒を回避できないと判定したときは、前記ピッチ角制御のみを行い、前記加速度検出手段の検出結果に基づいて前記高さ制御により転倒を回避できるが前記ピッチ角制御では転倒を回避できないと判定したときは、前記高さ制御のみを行う。
このような構成であれば、加速度検出手段の検出結果に基づいてピッチ角制御により転倒を回避できるが高さ制御では転倒を回避できないと判定されると、制御手段により、ピッチ角制御のみが行われる。また、加速度検出手段の検出結果に基づいて高さ制御により転倒を回避できるがピッチ角制御では転倒を回避できないと判定されると、制御手段により、高さ制御のみが行われる。
〔発明5〕 さらに、発明5の脚車輪型ロボットは、発明3および4のいずれか1の脚車輪型ロボットにおいて、前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御または前記高さ制御のいずれによっても転倒を回避できると判定したときは、前記ピッチ角制御および前記高さ制御に必要なコストをそれぞれ算出し、前記ピッチ角制御および前記高さ制御のうち前記コストの低い方を行う。
このような構成であれば、加速度検出手段の検出結果に基づいてピッチ角制御または高さ制御のいずれによっても転倒を回避できると判定されると、制御手段により、ピッチ角制御および高さ制御に必要なコストがそれぞれ算出され、ピッチ角制御および高さ制御のうちコストの低い方が行われる。
〔発明6〕 さらに、発明6の脚車輪型ロボットは、発明3ないし5のいずれか1の脚車輪型ロボットにおいて、前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御および前記高さ制御の両方により転倒を回避できると判定したときは、前記ピッチ角制御および前記高さ制御を行う。
このような構成であれば、加速度検出手段の検出結果に基づいてピッチ角制御および高さ制御の両方により転倒を回避できると判定されると、制御手段により、ピッチ角制御および高さ制御が行われる。
このような構成であれば、加速度検出手段の検出結果に基づいてピッチ角制御および高さ制御の両方により転倒を回避できると判定されると、制御手段により、ピッチ角制御および高さ制御が行われる。
〔発明7〕 さらに、発明7の脚車輪型ロボットは、発明3ないし6のいずれか1の脚車輪型ロボットにおいて、前記車輪を駆動するための動力を付与する第2アクチュエータを備え、前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御および前記高さ制御の両方によっても転倒を回避できないと判定したときは、前記加速度が減少するように前記第2アクチュエータを制御する。
このような構成であれば、加速度検出手段の検出結果に基づいてピッチ角制御および高さ制御の両方によっても転倒を回避できないと判定されると、制御手段により、加速度が減少するように第2アクチュエータが制御される。第2アクチュエータが駆動すると、車輪に減速力が付与され、加速度が減少する。
以上説明したように、発明1の車両の転倒防止装置によれば、車両のピッチ角が転倒回避に必要な角度となるように調整されるので、従来に比して、減速時または加速時に車両が転倒する可能性を低減することができるという効果が得られる。
一方、発明2の脚車輪型ロボットによれば、脚車輪型ロボットのピッチ角が転倒回避に必要な角度となるように調整されるので、従来に比して、減速時または加速時に脚車輪型ロボットが転倒する可能性を低減することができるという効果が得られる。
一方、発明2の脚車輪型ロボットによれば、脚車輪型ロボットのピッチ角が転倒回避に必要な角度となるように調整されるので、従来に比して、減速時または加速時に脚車輪型ロボットが転倒する可能性を低減することができるという効果が得られる。
さらに、発明3の脚車輪型ロボットによれば、ピッチ角制御だけでなく高さ制御によっても転倒回避が可能となるので、制御の自由度を向上することができるという効果が得られる。
さらに、発明4の脚車輪型ロボットによれば、加速度に応じてピッチ角制御および高さ制御のうち適切な制御を実現することができるという効果が得られる。
さらに、発明4の脚車輪型ロボットによれば、加速度に応じてピッチ角制御および高さ制御のうち適切な制御を実現することができるという効果が得られる。
さらに、発明5の脚車輪型ロボットによれば、ピッチ角制御または高さ制御に必要なコストを低減することができるという効果が得られる。
さらに、発明6の脚車輪型ロボットによれば、ピッチ角制御および高さ制御により転倒回避が可能となるので、加速度の許容範囲が大きくなるという効果が得られる。
さらに、発明7の脚車輪型ロボットによれば、ピッチ角制御または高さ制御だけでなく加速度制御によっても転倒回避が可能となるので、制御の自由度を向上することができるという効果が得られる。
さらに、発明6の脚車輪型ロボットによれば、ピッチ角制御および高さ制御により転倒回避が可能となるので、加速度の許容範囲が大きくなるという効果が得られる。
さらに、発明7の脚車輪型ロボットによれば、ピッチ角制御または高さ制御だけでなく加速度制御によっても転倒回避が可能となるので、制御の自由度を向上することができるという効果が得られる。
以下、本発明の実施の形態を図面を参照しながら説明する。図1ないし図10は、本発明に係る車両の転倒防止装置および脚車輪型ロボットの実施の形態を示す図である。
まず、本発明を適用する脚車輪型ロボット100の構成を説明する。
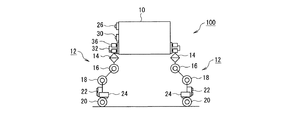
図1は、脚車輪型ロボット100の正面図である。
図2は、脚車輪型ロボット100の側面図である。
まず、本発明を適用する脚車輪型ロボット100の構成を説明する。
図1は、脚車輪型ロボット100の正面図である。
図2は、脚車輪型ロボット100の側面図である。
脚車輪型ロボット100は、図1および図2に示すように、基体10と、基体10に連結された4つの脚部12とを有して構成されている。
基体10の前部には、2本の脚部12が回転関節14を介して左右対称の位置に連結されている。また、基体10の後部には、2本の脚部12が回転関節14を介して左右対称の位置に連結されている。回転関節14は、脚車輪型ロボット100の底面と直交する方向を軸方向として回転する。すなわち、ヨー軸回りに回転する。
基体10の前部には、2本の脚部12が回転関節14を介して左右対称の位置に連結されている。また、基体10の後部には、2本の脚部12が回転関節14を介して左右対称の位置に連結されている。回転関節14は、脚車輪型ロボット100の底面と直交する方向を軸方向として回転する。すなわち、ヨー軸回りに回転する。
各脚部12には、2つの回転関節16、18が設けられている。回転関節14は、下方を軸方向として回転し、回転関節16、18は、回転関節14が図1の状態であるときは、脚車輪型ロボット100の側面と直交する方向を軸方向として回転する。すなわち、回転関節14が図1の状態であるときは、ピッチ軸回りに回転し、回転関節14が図1の状態から90度回転した状態であるときは、ロール軸回りに回転する。したがって、脚部12は、それぞれ3自由度を有する。
各脚部12の先端には、回転関節16、18と軸方向を同一にして駆動輪20が回転可能に設けられている。
各脚部12の先端には、脚車輪型ロボット100の移動経路上に存在する物体までの距離を測定する前方脚先センサ22と、接地面までの距離を測定する下方脚先センサ24とが設けられている。
各脚部12の先端には、脚車輪型ロボット100の移動経路上に存在する物体までの距離を測定する前方脚先センサ22と、接地面までの距離を測定する下方脚先センサ24とが設けられている。
一方、基体10の正面の上部中央には、水平面レーザ光を照射する水平レーザ26が設けられている。また、基体10の正面の中央左右には、垂直面レーザ光を照射する垂直レーザ28、30がそれぞれ設けられている。
基体10の正面の下部中央には、水平面レーザ光および垂直面レーザ光の反射光を含む画像を撮影するカメラ32が設けられている。
基体10の正面の下部中央には、水平面レーザ光および垂直面レーザ光の反射光を含む画像を撮影するカメラ32が設けられている。
水平レーザ26は、カメラ32で水平面レーザ光の反射光を含む画像が撮影できるように下方に所定角度傾けて設けられている。同様に、垂直レーザ28は、カメラ32で垂直面レーザ光の反射光を含む画像が撮影できるように右方に所定角度傾けて設けられ、垂直レーザ30は、左方に所定角度傾けて設けられている。
カメラ32の左右には、障害物を検出する障害物センサ34、36がそれぞれ設けられている。
カメラ32の左右には、障害物を検出する障害物センサ34、36がそれぞれ設けられている。
図3は、障害物センサ34、36の構成を示す図である。
障害物センサ34、36は、図3(a)に示すように、指向性の低い超音波測距センサを複数アレイ状に配列して構成することができる。また、図3(b)に示すように、指向性の高い赤外線測距センサを複数アレイ状に配列して構成することもできる。アレイ状に配列する構成に限らず、単体で構成してもよい。また、超音波測距センサまたは赤外線測距センサを複数平面上に配列したエリアセンサで構成してもよい。これにより、脚車輪型ロボット100の移動経路上に存在する物体を大まかに検出することができる。
障害物センサ34、36は、図3(a)に示すように、指向性の低い超音波測距センサを複数アレイ状に配列して構成することができる。また、図3(b)に示すように、指向性の高い赤外線測距センサを複数アレイ状に配列して構成することもできる。アレイ状に配列する構成に限らず、単体で構成してもよい。また、超音波測距センサまたは赤外線測距センサを複数平面上に配列したエリアセンサで構成してもよい。これにより、脚車輪型ロボット100の移動経路上に存在する物体を大まかに検出することができる。
次に、脚車輪型ロボット100の移動制御システムを説明する。
図4は、脚車輪型ロボット100の移動制御システムを示すブロック図である。
各脚部12の回転関節14〜18には、図4に示すように、回転関節14〜18を回転駆動する関節モータ40がそれぞれ設けられている。各関節モータ40には、関節モータ40の回転角度位置を検出するエンコーダ42と、モータ指令信号およびエンコーダ42の出力信号に基づいて関節モータ40の駆動を制御するドライバ44が設けられている。
図4は、脚車輪型ロボット100の移動制御システムを示すブロック図である。
各脚部12の回転関節14〜18には、図4に示すように、回転関節14〜18を回転駆動する関節モータ40がそれぞれ設けられている。各関節モータ40には、関節モータ40の回転角度位置を検出するエンコーダ42と、モータ指令信号およびエンコーダ42の出力信号に基づいて関節モータ40の駆動を制御するドライバ44が設けられている。
各脚部12の駆動輪20には、駆動輪20を回転駆動する車輪モータ50がそれぞれ設けられている。各車輪モータ50には、車輪モータ50の回転角度位置を検出するエンコーダ52と、モータ指令信号およびエンコーダ52の出力信号に基づいて車輪モータ50の駆動を制御するドライバ54が設けられている。
脚車輪型ロボット100は、さらに、CPU60と、脚車輪型ロボット100の姿勢を検出する3軸姿勢センサ70と、カメラ32の画像信号を処理するビジョンプロセッサ72と、外部のPC等と無線通信を行う無線通信部74と、ビジョンプロセッサ72および無線通信部74とCPU60の入出力を中継するハブ76と、警告音等を出力するスピーカ78とを有して構成される。
脚車輪型ロボット100は、さらに、CPU60と、脚車輪型ロボット100の姿勢を検出する3軸姿勢センサ70と、カメラ32の画像信号を処理するビジョンプロセッサ72と、外部のPC等と無線通信を行う無線通信部74と、ビジョンプロセッサ72および無線通信部74とCPU60の入出力を中継するハブ76と、警告音等を出力するスピーカ78とを有して構成される。
3軸姿勢センサ70は、ジャイロ若しくは加速度センサ、またはその両方を有し、地軸に対して脚車輪型ロボット100の姿勢の傾きを検出する。
CPU60は、モータ指令出力I/F61を介してドライバ44、54にモータ指令信号を出力し、角度取込I/F62を介してエンコーダ42、52の出力信号を入力する。また、センサ入力I/F63を介して、前方脚先センサ22、下方脚先センサ24、障害物センサ34、36および3軸姿勢センサ70からそれぞれセンサ信号を入力する。また、通信I/F64を介してハブ76と信号の入出力を行い、サウンド出力I/F65を介してスピーカ78に音声信号を出力する。
CPU60は、モータ指令出力I/F61を介してドライバ44、54にモータ指令信号を出力し、角度取込I/F62を介してエンコーダ42、52の出力信号を入力する。また、センサ入力I/F63を介して、前方脚先センサ22、下方脚先センサ24、障害物センサ34、36および3軸姿勢センサ70からそれぞれセンサ信号を入力する。また、通信I/F64を介してハブ76と信号の入出力を行い、サウンド出力I/F65を介してスピーカ78に音声信号を出力する。
次に、CPU60で実行される処理を説明する。
CPU60は、ROM等の所定領域に格納されている制御プログラムを起動させ、その制御プログラムに従って、図7および図8のフローチャートに示す走行制御処理および昇降制御処理を時分割で実行する。
初めに、走行制御処理を説明する。
CPU60は、ROM等の所定領域に格納されている制御プログラムを起動させ、その制御プログラムに従って、図7および図8のフローチャートに示す走行制御処理および昇降制御処理を時分割で実行する。
初めに、走行制御処理を説明する。
図5は、脚車輪型ロボット100の走行姿勢における減速モデルを示す図である。
なお、図5のモデルは、厳密にはタイヤ径を考慮し、車輪接地位置の誤差を考慮すべきであるが、これらが十分に小さいとして無視したモデルである。
図5に示すように、脚車輪型ロボット100の質量をM(図5のモデルでは、重心点に質量が集中していると仮定)、前輪の床反力をNf、後輪の床反力をNb、ホイールベースをWb、重心の高さをH、進行方向の加速度をa、脚車輪型ロボット100のピッチ角をθ、重心点と前輪接地点を結んだ線と、垂直方向下向きの軸とのなす角度をθf、重心点と後輪接地点を結んだ線と、垂直方向下向きの軸とのなす角度をθb、重心点を通る傾きθの直線と前輪股関節の軸心を通る直線との交点から前輪接地点までの距離をLf、重心点を通る傾きθの直線と後輪股関節の軸心を通る直線との交点から後輪接地点までの距離をLbとすると、垂直方向の力のつり合いから下式(4)が得られる。
なお、図5のモデルは、厳密にはタイヤ径を考慮し、車輪接地位置の誤差を考慮すべきであるが、これらが十分に小さいとして無視したモデルである。
図5に示すように、脚車輪型ロボット100の質量をM(図5のモデルでは、重心点に質量が集中していると仮定)、前輪の床反力をNf、後輪の床反力をNb、ホイールベースをWb、重心の高さをH、進行方向の加速度をa、脚車輪型ロボット100のピッチ角をθ、重心点と前輪接地点を結んだ線と、垂直方向下向きの軸とのなす角度をθf、重心点と後輪接地点を結んだ線と、垂直方向下向きの軸とのなす角度をθb、重心点を通る傾きθの直線と前輪股関節の軸心を通る直線との交点から前輪接地点までの距離をLf、重心点を通る傾きθの直線と後輪股関節の軸心を通る直線との交点から後輪接地点までの距離をLbとすると、垂直方向の力のつり合いから下式(4)が得られる。
また、重心の床面への投影点まわりのモーメントのつり合いから下式(5)、(5)′が得られる。
一方、幾何学的な関係より下式(6)〜(10)が得られる。
図5のモデルにおいて、Nb=0のとき、後輪が浮く状態となる。
Nb=0を上式(4)に代入すると、Mg=Nfとなり、これを上式(5)′に代入すると、−Ma−Nf・tanθf=0となる。そして、これを上式(7)に代入すると、下式(11)が得られる。
Nb=0を上式(4)に代入すると、Mg=Nfとなり、これを上式(5)′に代入すると、−Ma−Nf・tanθf=0となる。そして、これを上式(7)に代入すると、下式(11)が得られる。
上式(11)を上式(10)に代入すると、下式(12)が得られ、H、θ、aの関係式が導ける。
なお、θ=0を上式(12)に代入すると、下式(13)が得られ、上式(3)と等しくなることが確認できる。
図6は、進行方向の加速度の変化に対して、後輪が浮上する重心の高さの変化を示すグラフである。
上式(12)においてWb=350[mm]とすると、θ=0[°]、2[°]、4[°]の場合について、図6に示すような変化曲線がそれぞれ得られる。転倒を防止するためには、加速度が大きいほど重心を低くしなければならないことが分かる。
上式(12)においてWb=350[mm]とすると、θ=0[°]、2[°]、4[°]の場合について、図6に示すような変化曲線がそれぞれ得られる。転倒を防止するためには、加速度が大きいほど重心を低くしなければならないことが分かる。
例えば、4[km/m]での走行から0.5[s]で停止することを考えると、a=-2.22[m/s2]である。このとき、θ=0[°]のときの許容重心高さはH=772.5[mm]、θ=2[°]のときの許容重心高さはH=914.4[mm]、θ=4[°]のときの許容重心高さはH=1123.0[mm]であり、ピッチ角を大きくすれば許容重心高さを大きくできることが分かる。
図7は、走行制御処理を示すフローチャートである。
図7は、走行制御処理を示すフローチャートである。
走行制御処理は、図5のモデルを利用し、加速度に応じて脚車輪型ロボット100のピッチ角、重心高さおよび加速度を制御する処理であって、CPU60において実行されると、まず、図7に示すように、ステップS100に移行する。
ステップS100では、脚車輪型ロボット100の速度パターンから進行方向の加速度を検出する。速度パターンは、例えば、駆動輪20に速度センサを設け、速度センサからの入力に基づいて生成することができる。また、速度パターンから加速度を検出する場合に限らず、脚車輪型ロボット100に加速度センサを設け、加速度センサにより加速度を検出するようにしてもよい。
ステップS100では、脚車輪型ロボット100の速度パターンから進行方向の加速度を検出する。速度パターンは、例えば、駆動輪20に速度センサを設け、速度センサからの入力に基づいて生成することができる。また、速度パターンから加速度を検出する場合に限らず、脚車輪型ロボット100に加速度センサを設け、加速度センサにより加速度を検出するようにしてもよい。
次いで、ステップS102に移行して、検出した加速度および上式(12)に基づいて、脚車輪型ロボット100のピッチ角θを制御すること(以下、θ制御と略記する。)のみにより転倒が回避できるか否かを判定し、θ制御のみにより転倒が回避できると判定したとき(Yes)は、ステップS104に移行する。
ステップS104では、検出した加速度および上式(12)に基づいて、脚車輪型ロボット100の重心の高さHを制御すること(以下、H制御と略記する。)のみにより転倒が回避できるか否かを判定し、H制御のみによっては転倒が回避できないと判定したとき(No)は、ステップS106に移行する。
ステップS104では、検出した加速度および上式(12)に基づいて、脚車輪型ロボット100の重心の高さHを制御すること(以下、H制御と略記する。)のみにより転倒が回避できるか否かを判定し、H制御のみによっては転倒が回避できないと判定したとき(No)は、ステップS106に移行する。
ステップS106では、θ制御として、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように関節モータ40の制御を行う。具体的には、例えば、検出した加速度、脚車輪型ロボット100の現在の重心の高さHおよびホイールベースWbに基づいて、上式(12)により、転倒回避に必要な目標ピッチ角θtを算出し、脚車輪型ロボット100のピッチ角θが目標ピッチ角θtとなるようにドライバ44へのモータ指令信号を生成し、生成したモータ指令信号をドライバ44に出力する。なお、加速度の方向に傾倒する向きとは、脚車輪型ロボット100が図5の右方向に進行する場合、減速時は後傾姿勢となる向きを、加速時は前傾姿勢となる向きをいう。
一方、ステップS104で、H制御のみにより転倒が回避できると判定したとき(Yes)は、ステップS108に移行して、θ制御およびH制御に必要なコスト(移動エネルギー、移動時間その他のコスト)をそれぞれ算出し、ステップS110に移行する。
ステップS110では、H制御に必要なコストがθ制御に必要なコストよりも大きいか否かを判定し、H制御に必要なコストがθ制御に必要なコストよりも大きいと判定したとき(Yes)は、ステップS106に移行するが、そうでないと判定したとき(No)は、ステップS112に移行する。
ステップS110では、H制御に必要なコストがθ制御に必要なコストよりも大きいか否かを判定し、H制御に必要なコストがθ制御に必要なコストよりも大きいと判定したとき(Yes)は、ステップS106に移行するが、そうでないと判定したとき(No)は、ステップS112に移行する。
ステップS112では、H制御として、脚車輪型ロボット100の重心が転倒回避に必要な高さとなるように関節モータ40の制御を行う。具体的には、例えば、検出した加速度、脚車輪型ロボット100の現在のピッチ角θおよびホイールベースWbに基づいて、上式(12)により、転倒回避に必要な目標重心高さHtを算出し、脚車輪型ロボット100の重心が目標重心高さHtとなるようにドライバ44へのモータ指令信号を生成し、生成したモータ指令信号をドライバ44に出力する。
一方、ステップS102で、θ制御のみによっては転倒が回避できないと判定したとき(No)は、ステップS114に移行して、H制御のみにより転倒が回避できるか否かを判定し、H制御のみにより転倒が回避できると判定したとき(Yes)は、ステップS112に移行するが、そうでないと判定したとき(No)は、ステップS116に移行する。
ステップS116では、θ制御およびH制御により転倒が回避できるか否かを判定し、θ制御およびH制御により転倒が回避できると判定したとき(Yes)は、ステップS118に移行する。
ステップS116では、θ制御およびH制御により転倒が回避できるか否かを判定し、θ制御およびH制御により転倒が回避できると判定したとき(Yes)は、ステップS118に移行する。
ステップS118では、θ制御およびH制御として、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように、および、脚車輪型ロボット100の重心が転倒回避に必要な高さとなるように、関節モータ40の制御を行う。具体的には、例えば、検出した加速度、脚車輪型ロボット100の現在のピッチ角θ、現在の重心の高さHおよびホイールベースWbに基づいて、上式(12)により、限界ピッチ角θmaxおよび限界重心高さHminを超えない範囲で、転倒回避に必要な目標ピッチ角θtおよび目標重心高さHtを算出し、脚車輪型ロボット100のピッチ角θが目標ピッチ角θtとなるように、および、脚車輪型ロボット100の重心が目標重心高さHtとなるように、ドライバ44へのモータ指令信号を生成し、生成したモータ指令信号をドライバ44に出力する。
ステップS106、S112、S118の処理が終了すると、一連の処理を終了して元の処理に復帰させる。
一方、ステップS116で、θ制御およびH制御の両方によっても転倒が回避できないと判定したとき(No)は、ステップS120に移行して、加速度が減少するように車輪モータ50を制御する。具体的には、例えば、検出した加速度、限界ピッチ角θmax、限界重心高さHminおよびホイールベースWbに基づいて、上式(12)により、θ制御およびH制御が可能となる目標加速度を算出し、脚車輪型ロボット100の加速度が目標加速度となるように、ドライバ54へのモータ指令信号を生成し、生成したモータ指令信号をドライバ54に出力する。
ステップS120の処理が終了すると、ステップS102に移行する。
一方、ステップS116で、θ制御およびH制御の両方によっても転倒が回避できないと判定したとき(No)は、ステップS120に移行して、加速度が減少するように車輪モータ50を制御する。具体的には、例えば、検出した加速度、限界ピッチ角θmax、限界重心高さHminおよびホイールベースWbに基づいて、上式(12)により、θ制御およびH制御が可能となる目標加速度を算出し、脚車輪型ロボット100の加速度が目標加速度となるように、ドライバ54へのモータ指令信号を生成し、生成したモータ指令信号をドライバ54に出力する。
ステップS120の処理が終了すると、ステップS102に移行する。
次に、昇降制御処理を説明する。
図8は、昇降制御処理を示すフローチャートである。
昇降制御処理は、脚部12の昇降制御を行う処理であって、CPU60において実行されると、まず、図8に示すように、ステップS200に移行する。
図8は、昇降制御処理を示すフローチャートである。
昇降制御処理は、脚部12の昇降制御を行う処理であって、CPU60において実行されると、まず、図8に示すように、ステップS200に移行する。
ステップS200では、ビジョンプロセッサ72から画像を取り込み、ステップS202に移行する。
ステップS202では、取り込んだ画像に基づいて光切断法により階段の特徴点を抽出する。
図9は、光切断法の原理を説明するための図である。
ステップS202では、取り込んだ画像に基づいて光切断法により階段の特徴点を抽出する。
図9は、光切断法の原理を説明するための図である。
光切断法は、三角測量の原理により計測対象上の座標を求める計測法である。図9に計測座標系を示す。
計測対象上の座標P(x0、y0、z0)は、カメラ32の撮像素子上の任意の座標をPs(xi、yi、zi)とすると、下式(14)により求められる。
計測対象上の座標P(x0、y0、z0)は、カメラ32の撮像素子上の任意の座標をPs(xi、yi、zi)とすると、下式(14)により求められる。
次に、得られた三次元座標から、レーザ光の反射光の不連続点または屈曲点を階段の特徴点として抽出する。
図10は、階段にレーザ光を照射した状態およびカメラ32の撮像素子の画像を示す図である。
図10は、階段にレーザ光を照射した状態およびカメラ32の撮像素子の画像を示す図である。
脚車輪型ロボット100の移動経路上に階段が存在すると、図10(a)左側に示すように、水平レーザ26から照射された水平面レーザ光が階段の蹴込板および床面で反射し、カメラ32により、その反射光を含む階段の画像が撮影される。その画像に対して画像処理を行うと、図10(a)右側に示すように、蹴込板での反射光エッジおよび床面での反射光エッジを抽出することができる。そして、そのエッジ画像および上式(14)により得られた三次元座標に基づいて、反射光エッジの不連続点に対応する実座標を算出することができる。
また、図10(b)左側に示すように、垂直レーザ28から照射された垂直面レーザ光が階段の蹴込板および踏板で反射し、カメラ32により、その反射光を含む階段の画像が撮影される。その画像に対して画像処理を行うと、図10(b)右側に示すように、蹴込板での反射光エッジおよび踏板での反射光エッジを抽出することができる。また、垂直レーザ30についても同様であり、図10(c)右側に示すように、蹴込板での反射光エッジおよび踏板での反射光エッジを抽出することができる。そして、それらエッジ画像および上式(14)により得られた三次元座標に基づいて、反射光エッジの屈曲点に対する実座標を算出することができる。
図8に戻り、次いで、ステップS204に移行して、抽出した特徴点に基づいて階段の幅を算出し、ステップS206に移行して、抽出した特徴点に基づいて階段の段鼻部の実座標を算出し、ステップS208に移行する。
ステップS208では、算出した階段の幅および段鼻部の実座標、並びに3軸姿勢センサ70のセンサ信号に基づいて逆運動学計算および重心計算を行い、ステップS210に移行して、ステップS208の計算結果に基づいて脚先(駆動輪20)の着地位置を決定し、ステップS212に移行する。
ステップS208では、算出した階段の幅および段鼻部の実座標、並びに3軸姿勢センサ70のセンサ信号に基づいて逆運動学計算および重心計算を行い、ステップS210に移行して、ステップS208の計算結果に基づいて脚先(駆動輪20)の着地位置を決定し、ステップS212に移行する。
ステップS212では、前方脚先センサ22および下方脚先センサ24からそれぞれセンサ信号を入力し、ステップS214に移行して、入力した前方脚先センサ22のセンサ信号に基づいて蹴込板までの距離を算出し、ステップS216に移行して、入力した下方脚先センサ24のセンサ信号に基づいて脚先と踏板の位置関係を算出し、ステップS218に移行する。
ステップS218では、決定した着地位置および算出した両距離に基づいてドライバ44、54へのモータ指令信号を生成し、ステップS220に移行して、生成したモータ指令信号をドライバ44、54に出力し、ステップS222に移行する。
ステップS222では、脚先が踏板に着地したか否かを判定し、脚先が着地したと判定したとき(Yes)は、一連の処理を終了して元の処理に復帰させる。
ステップS222では、脚先が踏板に着地したか否かを判定し、脚先が着地したと判定したとき(Yes)は、一連の処理を終了して元の処理に復帰させる。
一方、ステップS222で、脚先が着地しないと判定したとき(No)は、ステップS212に移行する。
次に、本実施の形態の動作を説明する。
平地では、脚車輪型ロボット100は、車輪走行で移動することができる。したがって、車輪型ロボットと同様に平地での移動性が高い。このとき、減速時または加速時は進行方向の加速度が発生するので、ステップS100を経て、脚車輪型ロボット100の進行方向の加速度が検出される。
次に、本実施の形態の動作を説明する。
平地では、脚車輪型ロボット100は、車輪走行で移動することができる。したがって、車輪型ロボットと同様に平地での移動性が高い。このとき、減速時または加速時は進行方向の加速度が発生するので、ステップS100を経て、脚車輪型ロボット100の進行方向の加速度が検出される。
ここで、ステップS102、S104を経て、検出された加速度に基づいてθ制御により転倒を回避できるがH制御では転倒を回避できないと判定されると、ステップS106を経て、θ制御のみが行われる。θ制御では、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように関節モータ40が制御される。
また、ステップS102、S114を経て、検出された加速度に基づいてH制御により転倒を回避できるがθ制御では転倒を回避できないと判定されると、ステップS112を経て、H制御のみが行われる。H制御では、脚車輪型ロボット100の重心が転倒回避に必要な高さとなるように関節モータ40が制御される。
また、ステップS102、S104を経て、検出された加速度に基づいてθ制御またはH制御のいずれによっても転倒を回避できると判定されると、ステップS108を経て、θ制御およびH制御に必要なコストがそれぞれ算出され、ステップS110、S106またはステップS110、S112を経て、θ制御およびH制御のうちコストの低い方が行われる。
また、ステップS102、S104を経て、検出された加速度に基づいてθ制御またはH制御のいずれによっても転倒を回避できると判定されると、ステップS108を経て、θ制御およびH制御に必要なコストがそれぞれ算出され、ステップS110、S106またはステップS110、S112を経て、θ制御およびH制御のうちコストの低い方が行われる。
また、ステップS102、S114、S116を経て、検出された加速度に基づいてθ制御およびH制御の両方により転倒を回避できると判定されると、ステップS118を経て、θ制御およびH制御が行われる。
また、ステップS102、S114、S116を経て、検出された加速度に基づいてθ制御およびH制御の両方によっても転倒を回避できないと判定されると、ステップS120を経て、加速度が減少するように車輪モータ50が制御される。そして、θ制御およびH制御が可能な加速度にまで減少すると、ステップS118を経て、θ制御およびH制御が行われる。
また、ステップS102、S114、S116を経て、検出された加速度に基づいてθ制御およびH制御の両方によっても転倒を回避できないと判定されると、ステップS120を経て、加速度が減少するように車輪モータ50が制御される。そして、θ制御およびH制御が可能な加速度にまで減少すると、ステップS118を経て、θ制御およびH制御が行われる。
一方、脚車輪型ロボット100の移動経路上に階段が存在すると、水平レーザ26から照射された水平面レーザ光、および垂直レーザ28、30から照射された垂直面レーザ光がそれぞれ階段で反射し、カメラ32により、それら反射光を含む画像が撮影される。次いで、ステップS200、S202を経て、カメラ32で撮影された画像が取り込まれ、取り込まれた画像から階段の特徴点が抽出される。そして、ステップS204〜S210を経て、抽出された特徴点に基づいて階段の幅および段鼻部の実座標が算出され、算出された階段の幅および段鼻部の実座標に基づいて脚先の着地位置が決定される。
さらに、ステップS212〜S216を経て、脚先センサ22、24からそれぞれセンサ信号が入力され、蹴込板までの距離および脚先と踏板の位置関係が算出される。そして、ステップS218、S220を経て、決定された着地位置および算出された両距離に基づいてモータ指令信号が生成され、生成されたモータ指令信号がドライバ44、54に出力される。これにより、駆動輪20が回転するとともに回転関節14〜18が駆動し、脚車輪型ロボット100が姿勢を適切に保ちつつ階段を乗り越える。また、状況によっては階段を回避、停止する。したがって、脚型ロボットと同様に階段への適応性が高い。
このようにして、本実施の形態では、脚車輪型ロボット100の進行方向の加速度を検出し、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように、検出した加速度に基づいて関節モータ40を制御する。
これにより、脚車輪型ロボット100のピッチ角θが転倒回避に必要な角度となるように調整されるので、従来に比して、減速時または加速時に脚車輪型ロボット100が転倒する可能性を低減することができる。
これにより、脚車輪型ロボット100のピッチ角θが転倒回避に必要な角度となるように調整されるので、従来に比して、減速時または加速時に脚車輪型ロボット100が転倒する可能性を低減することができる。
さらに、本実施の形態では、脚車輪型ロボット100のピッチ角θが、加速度の方向に脚車輪型ロボット100が傾倒する向きで、かつ、転倒回避に必要な大きさとなるように関節モータ40を制御するθ制御、または、脚車輪型ロボット100の重心が転倒回避に必要な高さとなるように関節モータ40を制御するH制御を行う。
これにより、θ制御だけでなくH制御によっても転倒回避が可能となるので、制御の自由度を向上することができる。
これにより、θ制御だけでなくH制御によっても転倒回避が可能となるので、制御の自由度を向上することができる。
さらに、本実施の形態では、検出した加速度に基づいてθ制御により転倒を回避できるがH制御では転倒を回避できないと判定したときは、θ制御のみを行い、検出した加速度に基づいてH制御により転倒を回避できるがθ制御では転倒を回避できないと判定したときは、H制御のみを行う。
これにより、加速度に応じてθ制御およびH制御のうち適切な制御を実現することができる。
これにより、加速度に応じてθ制御およびH制御のうち適切な制御を実現することができる。
さらに、本実施の形態では、検出した加速度に基づいてθ制御またはH制御のいずれによっても転倒を回避できると判定したときは、θ制御およびH制御に必要なコストをそれぞれ算出し、θ制御およびH制御のうちコストの低い方を行う。
これにより、θ制御またはH制御に必要なコストを低減することができる。
さらに、本実施の形態では、検出した加速度に基づいてθ制御およびH制御の両方により転倒を回避できると判定したときは、θ制御およびH制御を行う。
これにより、θ制御またはH制御に必要なコストを低減することができる。
さらに、本実施の形態では、検出した加速度に基づいてθ制御およびH制御の両方により転倒を回避できると判定したときは、θ制御およびH制御を行う。
これにより、θ制御およびH制御により転倒回避が可能となるので、加速度の許容範囲が大きくなる。
さらに、本実施の形態では、検出した加速度に基づいてθ制御およびH制御の両方によっても転倒を回避できないと判定したときは、加速度が減少するように車輪モータ50を制御する。
さらに、本実施の形態では、検出した加速度に基づいてθ制御およびH制御の両方によっても転倒を回避できないと判定したときは、加速度が減少するように車輪モータ50を制御する。
これにより、θ制御またはH制御だけでなく加速度制御によっても転倒回避が可能となるので、制御の自由度を向上することができる。
さらに、本実施の形態では、レーザ26〜30およびカメラ32からなる画像センサと、脚先センサ22、24とを備え、カメラ32で撮影した画像および脚先センサ22、24で測定した距離に基づいて階段を認識し、その認識結果に基づいてモータ40、50を制御する。
さらに、本実施の形態では、レーザ26〜30およびカメラ32からなる画像センサと、脚先センサ22、24とを備え、カメラ32で撮影した画像および脚先センサ22、24で測定した距離に基づいて階段を認識し、その認識結果に基づいてモータ40、50を制御する。
これにより、画像センサおよび脚先センサ22、24を用いて未知の階段を認識しながら脚部12の昇降制御を行うので、従来に比して、未知の階段に対して高い適応性を実現することができる。また、人が活動する環境での動作を行えるので、人と一緒に行動する用途に用いられるホームロボット、パーソナルロボット等に好適である。
さらに、本実施の形態では、画像センサを基体10の正面に設け、脚先センサ22、24を脚部12の先端に設けた。
さらに、本実施の形態では、画像センサを基体10の正面に設け、脚先センサ22、24を脚部12の先端に設けた。
これにより、脚車輪型ロボット100の移動経路上に存在する物体を広い視野で検出することができるとともに、階段昇降時に駆動輪20と階段の距離を精度よく測定することができる。
さらに、本実施の形態では、進行方向に対して所定角度にレーザ光を照射するレーザ26〜30と、レーザ26〜30から所定距離隔てて設けられかつレーザ光の反射光を含む画像を撮像するカメラ32とを備え、カメラ32で撮影した画像に基づいて光切断法により階段を認識する。
さらに、本実施の形態では、進行方向に対して所定角度にレーザ光を照射するレーザ26〜30と、レーザ26〜30から所定距離隔てて設けられかつレーザ光の反射光を含む画像を撮像するカメラ32とを備え、カメラ32で撮影した画像に基づいて光切断法により階段を認識する。
これにより、階段の特徴のうち脚部12の昇降制御に有効な特徴を検出することができるので、未知の階段に対してさらに高い適応性を実現することができる。
さらに、本実施の形態では、水平レーザ26から照射された水平面レーザ光の反射光の撮影状態に基づいて階段の幅を算出し、垂直レーザ28、30から照射された2つの垂直面レーザ光の反射光の撮影状態に基づいて階段の段鼻部の実座標を算出する。
さらに、本実施の形態では、水平レーザ26から照射された水平面レーザ光の反射光の撮影状態に基づいて階段の幅を算出し、垂直レーザ28、30から照射された2つの垂直面レーザ光の反射光の撮影状態に基づいて階段の段鼻部の実座標を算出する。
これにより、階段の特徴のうち脚部12の昇降制御にさらに有効な特徴を検出することができるので、未知の階段に対してさらに高い適応性を実現することができる。
さらに、本実施の形態では、前方脚先センサ22の測定結果に基づいて階段の蹴込板までの距離を算出し、下方脚先センサ24の測定結果に基づいて駆動輪20と階段の踏板の位置関係を算出する。
さらに、本実施の形態では、前方脚先センサ22の測定結果に基づいて階段の蹴込板までの距離を算出し、下方脚先センサ24の測定結果に基づいて駆動輪20と階段の踏板の位置関係を算出する。
これにより、階段の特徴のうち脚部12の昇降制御にさらに有効な特徴を検出することができるので、未知の階段に対してさらに高い適応性を実現することができる。
上記実施の形態において、関節モータ40は、発明2若しくは3のアクチュエータ、または発明1のピッチ角調整手段に対応し、車輪モータ50は、発明7の第2アクチュエータに対応し、ステップS100は、発明1ないし7の加速度検出手段に対応している。また、ステップS102〜S120は、発明1ないし7の制御手段に対応している。
上記実施の形態において、関節モータ40は、発明2若しくは3のアクチュエータ、または発明1のピッチ角調整手段に対応し、車輪モータ50は、発明7の第2アクチュエータに対応し、ステップS100は、発明1ないし7の加速度検出手段に対応している。また、ステップS102〜S120は、発明1ないし7の制御手段に対応している。
なお、上記実施の形態においては、加速度が発生したときは、θ制御、H制御または加速度制御を常に行うように構成したが、これに限らず、θ制御またはH制御のいずれを行わなくても転倒を回避できると判定したときは、θ制御、H制御または加速度制御を行わないように構成することもできる。
また、上記実施の形態においては、θ制御、H制御または加速度制御を行うように構成したが、これに限らず、H制御(S112)を行わないように構成してもよいし、θ制御およびH制御(S118)を行わないように構成してもよいし、加速度制御(S120)を行わないように構成してもよい。
また、上記実施の形態においては、θ制御、H制御または加速度制御を行うように構成したが、これに限らず、H制御(S112)を行わないように構成してもよいし、θ制御およびH制御(S118)を行わないように構成してもよいし、加速度制御(S120)を行わないように構成してもよい。
また、上記実施の形態においては、特に旋回時については説明しなかったが、旋回時に制動または加速により進行方向の加速度が発生するときも、同様に適用することができる。
また、上記実施の形態においては、本発明に係る車両の転倒防止装置および脚車輪型ロボットを、階段を乗り越える場合について適用したが、これに限らず、階段以外の段差を乗り越える場合についても同様に適用することができる。
また、上記実施の形態においては、本発明に係る車両の転倒防止装置および脚車輪型ロボットを、階段を乗り越える場合について適用したが、これに限らず、階段以外の段差を乗り越える場合についても同様に適用することができる。
また、上記実施の形態においては、本発明に係る車両の転倒防止装置および脚車輪型ロボットを脚車輪型ロボット100に適用したが、これに限らず、本発明の主旨を逸脱しない範囲で他の場合にも適用可能である。例えば、直動関節で脚構造を実現する脚車輪型ロボットや、一般の車両に適用することもできる。
100 脚車輪型ロボット
10 基体
12 脚部
14〜18 回転関節
20 駆動輪
22、24 脚先センサ
26 水平レーザ
28、30 垂直レーザ
32 カメラ
34、36 障害物センサ
40、50 モータ
42、52 エンコーダ
44、54 ドライバ
70 3軸姿勢センサ
10 基体
12 脚部
14〜18 回転関節
20 駆動輪
22、24 脚先センサ
26 水平レーザ
28、30 垂直レーザ
32 カメラ
34、36 障害物センサ
40、50 モータ
42、52 エンコーダ
44、54 ドライバ
70 3軸姿勢センサ
Claims (7)
- 減速時または加速時の車両の転倒を防止する車両の転倒防止装置であって、
前記車両の進行方向の加速度を検出する加速度検出手段と、前記車両のピッチ角を調整するピッチ角調整手段と、前記車両のピッチ角が、前記加速度の方向に前記車両が傾倒する向きで、かつ、前記加速度による前記車両の転倒を回避するために必要な大きさとなるように、前記加速度検出手段の検出結果に基づいて前記ピッチ角調整手段を制御する制御手段とを備えることを特徴とする車両の転倒防止装置。 - 基体と、前記基体に対して少なくともピッチ軸回りの自由度を有して連結された脚部と、前記脚部に回転可能に設けられた車輪と、前記ピッチ軸回りの自由度の範囲で前記脚部を駆動するための動力を付与するアクチュエータと、前記アクチュエータを制御する制御手段とを備え、前記脚部の駆動および前記車輪の回転により移動する脚車輪型ロボットであって、
当該脚車輪型ロボットの進行方向の加速度を検出する加速度検出手段を備え、
前記制御手段は、当該脚車輪型ロボットのピッチ角が、前記加速度の方向に当該脚車輪型ロボットが傾倒する向きで、かつ、前記加速度による当該脚車輪型ロボットの転倒を回避するために必要な大きさとなるように、前記加速度検出手段の検出結果に基づいて前記アクチュエータを制御することを特徴とする脚車輪型ロボット。 - 請求項2において、
複数の前記脚部と、前記各脚部に回転可能に設けられた複数の前記車輪とを備え、
前記制御手段は、当該脚車輪型ロボットのピッチ角が、前記加速度の方向に当該脚車輪型ロボットが傾倒する向きで、かつ、前記加速度による当該脚車輪型ロボットの転倒を回避するために必要な大きさとなるように前記アクチュエータを制御するピッチ角制御、または、当該脚車輪型ロボットの重心が、前記加速度による当該脚車輪型ロボットの転倒を回避するために必要な高さとなるように前記アクチュエータを制御する高さ制御を前記加速度検出手段の検出結果に基づいて行うことを特徴とする脚車輪型ロボット。 - 請求項3において、
前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御により転倒を回避できるが前記高さ制御では転倒を回避できないと判定したときは、前記ピッチ角制御のみを行い、前記加速度検出手段の検出結果に基づいて前記高さ制御により転倒を回避できるが前記ピッチ角制御では転倒を回避できないと判定したときは、前記高さ制御のみを行うことを特徴とする脚車輪型ロボット。 - 請求項3および4のいずれか1項において、
前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御または前記高さ制御のいずれによっても転倒を回避できると判定したときは、前記ピッチ角制御および前記高さ制御に必要なコストをそれぞれ算出し、前記ピッチ角制御および前記高さ制御のうち前記コストの低い方を行うことを特徴とする脚車輪型ロボット。 - 請求項3ないし5のいずれか1項において、
前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御および前記高さ制御の両方により転倒を回避できると判定したときは、前記ピッチ角制御および前記高さ制御を行うことを特徴とする脚車輪型ロボット。 - 請求項3ないし6のいずれか1項において、
前記車輪を駆動するための動力を付与する第2アクチュエータを備え、
前記制御手段は、前記加速度検出手段の検出結果に基づいて前記ピッチ角制御および前記高さ制御の両方によっても転倒を回避できないと判定したときは、前記加速度が減少するように前記第2アクチュエータを制御することを特徴とする脚車輪型ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270135A JP2009095933A (ja) | 2007-10-17 | 2007-10-17 | 車両の転倒防止装置および脚車輪型ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270135A JP2009095933A (ja) | 2007-10-17 | 2007-10-17 | 車両の転倒防止装置および脚車輪型ロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009095933A true JP2009095933A (ja) | 2009-05-07 |
Family
ID=40699421
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007270135A Pending JP2009095933A (ja) | 2007-10-17 | 2007-10-17 | 車両の転倒防止装置および脚車輪型ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009095933A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102033545A (zh) * | 2010-09-30 | 2011-04-27 | 北京理工大学 | 一种轮腿式机器人的驱动牵引特性控制方法 |
| CN107009344A (zh) * | 2017-06-05 | 2017-08-04 | 游尔(北京)机器人科技股份有限公司 | 一种服务机器人底盘机构 |
| CN112243401A (zh) * | 2018-06-05 | 2021-01-19 | 索尼公司 | 信息处理装置、信息处理方法以及程序 |
| JP2021511974A (ja) * | 2018-03-29 | 2021-05-13 | トヨタ リサーチ インスティテュート,インコーポレイティド | 自律カートロボット用システム及び方法 |
| CN114502484A (zh) * | 2019-10-11 | 2022-05-13 | 索尼集团公司 | 机器人装置和用于控制机器人装置的方法 |
| KR102547144B1 (ko) * | 2022-12-02 | 2023-06-22 | 한경국립대학교 산학협력단 | 수평 유지도가 향상된 농작업 차량 및 그 제어 방법 |
| KR102650848B1 (ko) * | 2023-06-05 | 2024-03-22 | 한경국립대학교 산학협력단 | 비평탄 노지에서 과수 수확을 위한 매니퓰레이터가 구비된 농작업 차량 및 그 제어 방법 |
-
2007
- 2007-10-17 JP JP2007270135A patent/JP2009095933A/ja active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102033545A (zh) * | 2010-09-30 | 2011-04-27 | 北京理工大学 | 一种轮腿式机器人的驱动牵引特性控制方法 |
| CN107009344A (zh) * | 2017-06-05 | 2017-08-04 | 游尔(北京)机器人科技股份有限公司 | 一种服务机器人底盘机构 |
| JP2022082550A (ja) * | 2018-03-29 | 2022-06-02 | トヨタ リサーチ インスティテュート,インコーポレイティド | 自律カートロボット用システム及び方法 |
| JP2021511974A (ja) * | 2018-03-29 | 2021-05-13 | トヨタ リサーチ インスティテュート,インコーポレイティド | 自律カートロボット用システム及び方法 |
| JP7128903B2 (ja) | 2018-03-29 | 2022-08-31 | トヨタ リサーチ インスティテュート,インコーポレイティド | 自律カートロボット用システム及び方法 |
| JP7443408B2 (ja) | 2018-03-29 | 2024-03-05 | トヨタ リサーチ インスティテュート,インコーポレイティド | 自律カートロボット用システム及び方法 |
| JPWO2019235020A1 (ja) * | 2018-06-05 | 2021-06-24 | ソニーグループ株式会社 | 情報処理装置、情報処理方法及びプログラム |
| CN112243401A (zh) * | 2018-06-05 | 2021-01-19 | 索尼公司 | 信息处理装置、信息处理方法以及程序 |
| JP7200990B2 (ja) | 2018-06-05 | 2023-01-10 | ソニーグループ株式会社 | 情報処理装置、情報処理方法及びプログラム |
| US11577390B2 (en) | 2018-06-05 | 2023-02-14 | Sony Corporation | Information processing device and information processing method |
| CN112243401B (zh) * | 2018-06-05 | 2024-02-20 | 索尼公司 | 信息处理装置、信息处理方法以及程序 |
| CN114502484A (zh) * | 2019-10-11 | 2022-05-13 | 索尼集团公司 | 机器人装置和用于控制机器人装置的方法 |
| KR102547144B1 (ko) * | 2022-12-02 | 2023-06-22 | 한경국립대학교 산학협력단 | 수평 유지도가 향상된 농작업 차량 및 그 제어 방법 |
| KR102650848B1 (ko) * | 2023-06-05 | 2024-03-22 | 한경국립대학교 산학협력단 | 비평탄 노지에서 과수 수확을 위한 매니퓰레이터가 구비된 농작업 차량 및 그 제어 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101158372B1 (ko) | 도립 차륜형 이동체 및 그 제어 방법 | |
| JP4605204B2 (ja) | 倒立振子型移動体、及びその制御方法 | |
| JP6571631B2 (ja) | 走行車両及び走行車両の制御方法 | |
| JP4735598B2 (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP2009095933A (ja) | 車両の転倒防止装置および脚車輪型ロボット | |
| JP2014161991A (ja) | ロボットの移動機構及びそれを備えるロボット | |
| JP5065206B2 (ja) | 移動体、倒立型移動体、及びその制御方法 | |
| JP5316142B2 (ja) | 倒立車輪型移動体 | |
| WO2018074117A1 (ja) | 移動装置、および、移動装置管理システム | |
| JP2010215064A (ja) | 移動体 | |
| JP2012011886A (ja) | 動力車 | |
| JP2009050936A (ja) | 干渉判定装置および脚車輪型ロボット | |
| JP7295654B2 (ja) | 自走式ロボット | |
| JP4824492B2 (ja) | 移動型ロボット | |
| JP5811576B2 (ja) | 衝突防止機能付き車両 | |
| JP5358961B2 (ja) | 移動ロボット及びレーザレンジセンサの走査速度制御方法 | |
| JP2008126936A (ja) | 移動装置 | |
| JP2008260117A (ja) | 脚車輪型ロボット及び脚車輪装置 | |
| JP2010005718A (ja) | 脚式ロボット | |
| JP2007190654A (ja) | 脚車輪型ロボット | |
| JP2008023700A (ja) | 脚型ロボットの力センサ設置構造 | |
| JP7452127B2 (ja) | 自律移動装置および自律移動装置の制御方法 | |
| JP2009101897A (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP7020290B2 (ja) | 自律移動体 | |
| JP2011183032A (ja) | 移動体 |