JP2009098416A - 形状記憶合金アクチュエータおよびそれを備える電子機器 - Google Patents
形状記憶合金アクチュエータおよびそれを備える電子機器 Download PDFInfo
- Publication number
- JP2009098416A JP2009098416A JP2007270014A JP2007270014A JP2009098416A JP 2009098416 A JP2009098416 A JP 2009098416A JP 2007270014 A JP2007270014 A JP 2007270014A JP 2007270014 A JP2007270014 A JP 2007270014A JP 2009098416 A JP2009098416 A JP 2009098416A
- Authority
- JP
- Japan
- Prior art keywords
- command value
- resistance
- resistance command
- shape memory
- memory alloy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 229910001285 shape-memory alloy Inorganic materials 0.000 title claims abstract description 189
- 238000001816 cooling Methods 0.000 claims abstract description 65
- 238000012937 correction Methods 0.000 claims abstract description 46
- 238000001514 detection method Methods 0.000 claims abstract description 46
- 238000003384 imaging method Methods 0.000 description 41
- 230000008859 change Effects 0.000 description 26
- 238000005338 heat storage Methods 0.000 description 9
- 238000003860 storage Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 230000007613 environmental effect Effects 0.000 description 7
- 238000011156 evaluation Methods 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 230000008602 contraction Effects 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000009466 transformation Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000017525 heat dissipation Effects 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000029052 metamorphosis Effects 0.000 description 1
- 239000000615 nonconductor Substances 0.000 description 1
- 229910052755 nonmetal Inorganic materials 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images








Landscapes
- Lens Barrels (AREA)
Abstract
【課題】 形状記憶合金アクチュエータおよびそれを備える電子機器において、制御目標位置に対する位置精度のバラツキを低減することができるようにする。
【解決手段】 形状記憶合金アクチュエータであって、SMAワイヤ5の電気抵抗を検出する抵抗検出部14と、スキャン駆動を行う第1の抵抗指令値データと、目標位置駆動を行う第2の抵抗指令値データとを生成する抵抗指令値生成部12と、SMAワイヤ5への通電量を変化させる通電制御部13と、スキャン駆動における制御目標位置に対応する目標候補抵抗指令値を求める目標位置到達検知部15とを備え、抵抗指令値生成部12は、第2の抵抗指令値データを生成する際に、目標抵抗指令値を目標候補抵抗指令値に補正値を加算して生成するとともに、目標候補抵抗指令値に応じて、補正値および冷却時間の少なくともいずれかを変化させるようにした構成とする。
【選択図】 図4
【解決手段】 形状記憶合金アクチュエータであって、SMAワイヤ5の電気抵抗を検出する抵抗検出部14と、スキャン駆動を行う第1の抵抗指令値データと、目標位置駆動を行う第2の抵抗指令値データとを生成する抵抗指令値生成部12と、SMAワイヤ5への通電量を変化させる通電制御部13と、スキャン駆動における制御目標位置に対応する目標候補抵抗指令値を求める目標位置到達検知部15とを備え、抵抗指令値生成部12は、第2の抵抗指令値データを生成する際に、目標抵抗指令値を目標候補抵抗指令値に補正値を加算して生成するとともに、目標候補抵抗指令値に応じて、補正値および冷却時間の少なくともいずれかを変化させるようにした構成とする。
【選択図】 図4
Description
本発明は、形状記憶合金アクチュエータおよびそれを備える電子機器に関する。
従来、例えば、カメラや携帯電話などの電子機器において、オートフォーカス機構の一部などに用いる小型のアクチュエータとして、形状記憶合金を使用した形状記憶合金アクチュエータが種々提案されている。
形状記憶合金は、一定の温度範囲では、変形しても元の形状を回復する性質をもつ。そのため、例えば、ワイヤ状の形状記憶合金に通電すれば、この形状記憶合金ワイヤに発生するジュール熱によって、この形状記憶合金ワイヤが加熱され温度に応じて変形される。
このような形状記憶合金ワイヤを、例えば、支持体上に張架し、被駆動体をこの形状記憶合金ワイヤの中間部等に付勢状態に係止することで、形状記憶合金ワイヤの温度変化による伸縮に伴って、被駆動体が駆動される形状記憶合金アクチュエータを構成することができる。
このような形状記憶合金アクチュエータとして、例えば、特許文献1には、形状記憶合金の線材の長さが線材の抵抗値に比例することを利用して、線材の通電時の電気抵抗を検出し、電気抵抗が所定値となるように、通電時間を制御するようにしたアクチュエータが記載されている。
特開2006−183564号公報
形状記憶合金は、一定の温度範囲では、変形しても元の形状を回復する性質をもつ。そのため、例えば、ワイヤ状の形状記憶合金に通電すれば、この形状記憶合金ワイヤに発生するジュール熱によって、この形状記憶合金ワイヤが加熱され温度に応じて変形される。
このような形状記憶合金ワイヤを、例えば、支持体上に張架し、被駆動体をこの形状記憶合金ワイヤの中間部等に付勢状態に係止することで、形状記憶合金ワイヤの温度変化による伸縮に伴って、被駆動体が駆動される形状記憶合金アクチュエータを構成することができる。
このような形状記憶合金アクチュエータとして、例えば、特許文献1には、形状記憶合金の線材の長さが線材の抵抗値に比例することを利用して、線材の通電時の電気抵抗を検出し、電気抵抗が所定値となるように、通電時間を制御するようにしたアクチュエータが記載されている。
しかしながら、上記のような従来の形状記憶合金アクチュエータおよびそれを備える電子機器には、以下のような問題があった。
特許文献1に記載の技術では、形状記憶合金アクチュエータの線材の抵抗値が線材の伸縮量のみによって決まる場合、線材の抵抗値が線材の温度と一定の関係にあるため、移動位置の位置精度が良好な駆動制御を行うことができるものの、線材の温度が線材の伸縮量以外の要因の影響を受ける場合には、移動位置精度が悪化してしまうという問題がある。
例えば、線材は、支持体や被駆動体と接触している部分では、支持体や被駆動体の熱容量の影響を受けるため、温度変化の応答性が空中に延在する部分に比べて悪化する。このため、例えば、繰り返し駆動を行うと線材に蓄熱されていくので、線材の抵抗値が一定になるように駆動制御しても、移動位置がばらついてしまうことになる。
例えば、このような駆動制御を行う形状記憶合金アクチュエータをカメラなどのオートフォーカス機構のアクチュエータとして用いる場合、いわゆるフライバック方式のオートフォーカス動作が行われることが多い。このようなフライバック方式のオートフォーカス動作では、被駆動体であるレンズユニットを、制御目標位置である焦点位置を検出するスキャン駆動と、スキャン駆動によって検出されたた制御目標位置に向けてレンズユニットを駆動する二段階の駆動動作が行われる。すなわち、まずレンズユニットを基準位置から焦点位置の方向に向かってスキャン駆動し、その途上で映像を取得して、例えば映像信号の高調波成分の大きさを比較することによって焦点位置を検出する。
次に、この検出後、焦点位置を超えた位置から一旦レンズユニットを基準位置に移動させ、スキャン駆動で検出された焦点位置情報に基づいて、再度被駆動体を駆動する。これにより、形状記憶合金のヒステリシス特性に影響されることなく、焦点位置に精度よく移動することができる。
ただし、この場合、スキャン駆動と焦点位置への駆動とが必ず一組で行われるため、スキャン駆動での蓄熱による形状記憶合金の温度上昇の影響を受けるため、2回目の駆動では移動位置の再現性が低下しやすいという問題がある。特に、例えばカメラのオートフォーカス動作などの場合のように、制御目標位置が変化する場合には、スキャン駆動による温度上昇もばらつくため、2回目の駆動での移動位置がばらついてしまうという問題がある。
特許文献1に記載の技術では、形状記憶合金アクチュエータの線材の抵抗値が線材の伸縮量のみによって決まる場合、線材の抵抗値が線材の温度と一定の関係にあるため、移動位置の位置精度が良好な駆動制御を行うことができるものの、線材の温度が線材の伸縮量以外の要因の影響を受ける場合には、移動位置精度が悪化してしまうという問題がある。
例えば、線材は、支持体や被駆動体と接触している部分では、支持体や被駆動体の熱容量の影響を受けるため、温度変化の応答性が空中に延在する部分に比べて悪化する。このため、例えば、繰り返し駆動を行うと線材に蓄熱されていくので、線材の抵抗値が一定になるように駆動制御しても、移動位置がばらついてしまうことになる。
例えば、このような駆動制御を行う形状記憶合金アクチュエータをカメラなどのオートフォーカス機構のアクチュエータとして用いる場合、いわゆるフライバック方式のオートフォーカス動作が行われることが多い。このようなフライバック方式のオートフォーカス動作では、被駆動体であるレンズユニットを、制御目標位置である焦点位置を検出するスキャン駆動と、スキャン駆動によって検出されたた制御目標位置に向けてレンズユニットを駆動する二段階の駆動動作が行われる。すなわち、まずレンズユニットを基準位置から焦点位置の方向に向かってスキャン駆動し、その途上で映像を取得して、例えば映像信号の高調波成分の大きさを比較することによって焦点位置を検出する。
次に、この検出後、焦点位置を超えた位置から一旦レンズユニットを基準位置に移動させ、スキャン駆動で検出された焦点位置情報に基づいて、再度被駆動体を駆動する。これにより、形状記憶合金のヒステリシス特性に影響されることなく、焦点位置に精度よく移動することができる。
ただし、この場合、スキャン駆動と焦点位置への駆動とが必ず一組で行われるため、スキャン駆動での蓄熱による形状記憶合金の温度上昇の影響を受けるため、2回目の駆動では移動位置の再現性が低下しやすいという問題がある。特に、例えばカメラのオートフォーカス動作などの場合のように、制御目標位置が変化する場合には、スキャン駆動による温度上昇もばらつくため、2回目の駆動での移動位置がばらついてしまうという問題がある。
本発明は、上記のような問題に鑑みてなされたものであり、制御目標位置に対する位置精度のバラツキを低減することができる形状記憶合金アクチュエータおよびそれを備える電子機器を提供することを目的とする。
上記の課題を解決するために、請求項1に記載の発明では、支持体に設置された形状記憶合金部材に対して、被駆動体を付勢状態に係止し、通電によるジュール熱によって前記形状記憶合金部材を収縮変形させることで、前記被駆動体を基準位置から制御目標位置を超える範囲まで一定方向に移動させる第1の移動動作を行い、少なくとも前記第1の移動動作が終わるまでの間に確定された制御目標位置の情報に基づいて、前記形状記憶合金部材への通電を低減もしくは停止することで、前記被駆動体を前記基準位置に戻してから、前記被駆動体を前記制御目標位置に移動させる第2の移動動作とを行う形状記憶合金アクチュエータであって、前記形状記憶合金部材の電気抵抗を検出する抵抗検出部と、前記第1の移動動作を行うために、前記形状記憶合金部材の電気抵抗の目標値である抵抗指令値が時間とともに低減されるような第1の抵抗指令値データと、前記第2の移動動作を行うために、前記形状記憶合金部材に対する通電を低減もしくは停止する冷却時間の間、前記第1の抵抗指令値データの最小値よりも大きな抵抗指令値としてから、前記被駆動体を前記制御目標位置に位置づけるための抵抗指令値である目標抵抗指令値に変更するような第2の抵抗指令値データとを生成する抵抗指令値生成部と、前記抵抗検出部で検出された前記形状記憶合金部材の電気抵抗が前記抵抗指令値生成部で生成された前記各抵抗指令値に一致するように、前記形状記憶合金部材への通電量を変化させる通電制御部と、
前記確定された制御目標位置の情報を取得して、前記第1の移動動作における前記制御目標位置に対応する目標候補抵抗指令値を求める目標位置到達検知部とを備え、前記抵抗指令値生成部は、前記第2の抵抗指令値データを生成する際に、前記目標抵抗指令値を、前記目標位置到達検知部が求めた前記目標候補抵抗指令値に補正値を加算して生成するとともに、前記目標候補抵抗指令値に応じて、前記補正値および前記冷却時間の少なくともいずれかを変化させるようにした構成とする。
この発明によれば、抵抗指令値生成部によって、第1の抵抗指令値データが生成され、それらが通電制御部に順次送出されるによって、形状記憶合金部材に通電される。形状記憶合金部材は、ジュール熱によって漸次加熱され、温度に応じて変形することで、形状記憶合金部材の電気抵抗が変化する。これにより、形状記憶合金部材は、第1の抵抗指令値データにおける抵抗指令値の変化に応じて温度変化して収縮変形し、被駆動体は基準位置から制御目標位置を超える範囲まで一定方向に移動される(第1の移動動作)。
一方、少なくともこの第1の移動動作の間に制御目標位置が確定され、確定された制御目標位置の情報が、目標位置到達検知部によって取得され、第1の移動動作における制御目標位置に対応する目標候補抵抗指令値が求められる。
次に、抵抗指令値生成部によって、形状記憶合金部材に対する通電を低減もしくは停止する冷却時間の間、第1の抵抗指令値データの最小値よりも大きな抵抗指令値としてから、被駆動体を制御目標位置に位置づけるための抵抗指令値である目標抵抗指令値に変更するような第2の抵抗指令値データが生成され、通電制御部に送出される。
このとき、抵抗指令値検出部は、目標抵抗指令値を、目標候補抵抗指令値に補正値を加算して生成するとともに、目標候補抵抗指令値に応じて、補正値および冷却時間の少なくともいずれかを変化させることができる。
第1の移動動作において求められた目標候補抵抗指令値は、第1の移動動作の駆動パターンが決まっているため、形状記憶合金の熱的状態を示すパラメータとなっている。一方、補正値および冷却時間は、いずれも第2の移動動作において、形状記憶合金の熱的状態を変化させるパラメータである。
そのため、目標候補抵抗指令値に応じて、補正値および冷却時間の少なくともいずれかを変化させることで、第2の移動動作における目標抵抗指令値における形状記憶合金部材の温度と、第1の移動動作における目標候補抵抗指令値における形状記憶合金部材の温度との温度差を低減することができる。温度差は、より好ましくは各制御目標位置で、同等となるようにする。
すなわち、目標候補抵抗指令値が小さいほど、第1の移動動作での形状記憶合金部材への蓄熱が大きいので、冷却時間を変化させる場合には、形状記憶合金部材の温度が低くなりすぎないように冷却時間を短縮する。また補正値を変化させる場合には、形状記憶合金部材の温度が低い場合にも温度が高い場合と同様の移動位置が得られるように補正値を増大させる。
前記確定された制御目標位置の情報を取得して、前記第1の移動動作における前記制御目標位置に対応する目標候補抵抗指令値を求める目標位置到達検知部とを備え、前記抵抗指令値生成部は、前記第2の抵抗指令値データを生成する際に、前記目標抵抗指令値を、前記目標位置到達検知部が求めた前記目標候補抵抗指令値に補正値を加算して生成するとともに、前記目標候補抵抗指令値に応じて、前記補正値および前記冷却時間の少なくともいずれかを変化させるようにした構成とする。
この発明によれば、抵抗指令値生成部によって、第1の抵抗指令値データが生成され、それらが通電制御部に順次送出されるによって、形状記憶合金部材に通電される。形状記憶合金部材は、ジュール熱によって漸次加熱され、温度に応じて変形することで、形状記憶合金部材の電気抵抗が変化する。これにより、形状記憶合金部材は、第1の抵抗指令値データにおける抵抗指令値の変化に応じて温度変化して収縮変形し、被駆動体は基準位置から制御目標位置を超える範囲まで一定方向に移動される(第1の移動動作)。
一方、少なくともこの第1の移動動作の間に制御目標位置が確定され、確定された制御目標位置の情報が、目標位置到達検知部によって取得され、第1の移動動作における制御目標位置に対応する目標候補抵抗指令値が求められる。
次に、抵抗指令値生成部によって、形状記憶合金部材に対する通電を低減もしくは停止する冷却時間の間、第1の抵抗指令値データの最小値よりも大きな抵抗指令値としてから、被駆動体を制御目標位置に位置づけるための抵抗指令値である目標抵抗指令値に変更するような第2の抵抗指令値データが生成され、通電制御部に送出される。
このとき、抵抗指令値検出部は、目標抵抗指令値を、目標候補抵抗指令値に補正値を加算して生成するとともに、目標候補抵抗指令値に応じて、補正値および冷却時間の少なくともいずれかを変化させることができる。
第1の移動動作において求められた目標候補抵抗指令値は、第1の移動動作の駆動パターンが決まっているため、形状記憶合金の熱的状態を示すパラメータとなっている。一方、補正値および冷却時間は、いずれも第2の移動動作において、形状記憶合金の熱的状態を変化させるパラメータである。
そのため、目標候補抵抗指令値に応じて、補正値および冷却時間の少なくともいずれかを変化させることで、第2の移動動作における目標抵抗指令値における形状記憶合金部材の温度と、第1の移動動作における目標候補抵抗指令値における形状記憶合金部材の温度との温度差を低減することができる。温度差は、より好ましくは各制御目標位置で、同等となるようにする。
すなわち、目標候補抵抗指令値が小さいほど、第1の移動動作での形状記憶合金部材への蓄熱が大きいので、冷却時間を変化させる場合には、形状記憶合金部材の温度が低くなりすぎないように冷却時間を短縮する。また補正値を変化させる場合には、形状記憶合金部材の温度が低い場合にも温度が高い場合と同様の移動位置が得られるように補正値を増大させる。
請求項2に記載の発明では、請求項1に記載の形状記憶合金アクチュエータにおいて、前記抵抗指令値生成部は、前記補正値を、前記目標候補抵抗指令値によらず一定値0に設定し、前記冷却時間を、前記目標候補抵抗指令値がより小さい場合の冷却時間以上に設定して変化させる構成とする。
この発明によれば、目標候補抵抗指令値が小さいほど第1の移動動作での蓄熱の程度が大きいが、目標候補抵抗指令値によらず補正値を一定値0に設定しても、目標候補抵抗指令値がより小さい場合の冷却時間以上に設定して変化させるので、第1および第2の移動動作における制御目標位置での形状記憶合金部材の温度差を低減することができる。
この場合、基準位置から遠くに移動する場合には、冷却時間が少ない分だけ第2の移動動作に要する時間を短縮することができるので、平均的な駆動制御時間を短縮することができる。
この発明によれば、目標候補抵抗指令値が小さいほど第1の移動動作での蓄熱の程度が大きいが、目標候補抵抗指令値によらず補正値を一定値0に設定しても、目標候補抵抗指令値がより小さい場合の冷却時間以上に設定して変化させるので、第1および第2の移動動作における制御目標位置での形状記憶合金部材の温度差を低減することができる。
この場合、基準位置から遠くに移動する場合には、冷却時間が少ない分だけ第2の移動動作に要する時間を短縮することができるので、平均的な駆動制御時間を短縮することができる。
請求項3に記載の発明では、請求項1に記載の形状記憶合金アクチュエータにおいて、前記抵抗指令値生成部は、前記冷却時間を、前記目標候補抵抗指令値によらず、前記第1の移動動作開始時の前記形状記憶合金部材の温度まで冷却されるよりも短い一定時間とし、前記補正値を、前記目標候補抵抗指令値がより小さい場合の補正値以上に設定して変化させる構成とする。
この発明によれば、冷却時間を第1の移動動作開始時の形状記憶合金部材の温度まで冷却されるより短い一定時間とするので、第1の移動動作において目標候補抵抗指令値が大きいほど第1の移動動作での蓄熱を冷却する時間が不足するが、補正値を、目標候補抵抗指令値がより小さい場合の補正値以上に設定して変化させて加熱を抑えるので、第1および第2の移動動作における制御目標位置での形状記憶合金部材の温度差を低減することができる。
この場合、冷却時間を第1の移動動作開始時の形状記憶合金部材の温度まで冷却されるまでの時間に設定する場合に比べて、冷却時間を短縮することができるので、第2の移動動作に要する移動の時間を短縮することができる。
この発明によれば、冷却時間を第1の移動動作開始時の形状記憶合金部材の温度まで冷却されるより短い一定時間とするので、第1の移動動作において目標候補抵抗指令値が大きいほど第1の移動動作での蓄熱を冷却する時間が不足するが、補正値を、目標候補抵抗指令値がより小さい場合の補正値以上に設定して変化させて加熱を抑えるので、第1および第2の移動動作における制御目標位置での形状記憶合金部材の温度差を低減することができる。
この場合、冷却時間を第1の移動動作開始時の形状記憶合金部材の温度まで冷却されるまでの時間に設定する場合に比べて、冷却時間を短縮することができるので、第2の移動動作に要する移動の時間を短縮することができる。
請求項4に記載の発明では、請求項1〜3のいずれかに記載の形状記憶合金アクチュエータにおいて、前記抵抗指令値生成部は、前記第2の移動動作で前記被駆動体を前記基準位置に移動させる間、前記抵抗検出部によって検出される電気抵抗の検出値を取得して、該電気抵抗の検出値が一定の閾値以上となったかどうか判定する電気抵抗値判定手段を備えるとともに、前記電気抵抗値判定手段によって、前記電気抵抗の検出値が前記閾値以上になったと判定されたときに、前記第2の抵抗指令値データを、その先頭に戻って前記通電制御部に順次送出するようにした構成とする。
この発明によれば、電気抵抗判定手段を備えるため、例えば、環境温度の影響によって、第1の移動動作後の放熱に要する時間がばらつくような場合でも、電気抵抗の検出値が一定の閾値以上になった時点から、第2の抵抗指令値データを、その先頭に戻って駆動制御部に順次送出するので、抵抗指令値生成部が設定した冷却時間が確実に確保される。
この発明によれば、電気抵抗判定手段を備えるため、例えば、環境温度の影響によって、第1の移動動作後の放熱に要する時間がばらつくような場合でも、電気抵抗の検出値が一定の閾値以上になった時点から、第2の抵抗指令値データを、その先頭に戻って駆動制御部に順次送出するので、抵抗指令値生成部が設定した冷却時間が確実に確保される。
請求項5に記載の発明では、請求項1〜3のいずれかに記載の形状記憶合金アクチュエータにおいて、前記抵抗指令値生成部は、前記第2の移動動作で前記被駆動体を前記基準位置に移動させる間、前記抵抗検出部によって検出される電気抵抗の検出値を取得して、該電気抵抗の検出値が一定の閾値以上となったかどうか判定する電気抵抗値判定手段と、前記第2の移動動作で前記被駆動体を前記基準位置に向けて移動を開始してから、前記電気抵抗判定手段によって前記電気抵抗の検出値が前記閾値以上になったと判定されるまでの間の閾値通過時間を取得する計時手段と、前記第2の抵抗指令値データを、前記計時手段で取得された閾値通過時間に応じて変更する抵抗指令値データ変更手段とを備え、前記電気抵抗値判定手段によって、前記電気抵抗の検出値が前記閾値以上になったと判定されたときに、前記抵抗指令値データ変更手段によって変更された第2の抵抗指令値データを前記駆動制御部に順次送出するようにした構成とする。
この発明によれば、第2の移動動作時に、計時手段によって、第2の移動動作で被駆動体を基準位置に向けて移動を開始してから、電気抵抗判定手段で電気抵抗の検出値が一定の閾値以上になったと判定されるまでの間の閾値通過時間を取得し、抵抗指令位置データ変更手段によって、第2の抵抗指令値データを変更し、変更された第2の抵抗指令値データによって、第2の移動動作を続けることができる。
このため、閾値通過時間が異なる場合により適切な第2の抵抗指令値データを設定して、位置精度を向上することができる。例えば、閾値通過時間が長い場合、環境温度や支持体の温度が高温になっていると考えられるので、冷却時間をより長く設定し直す変更を行ってより位置精度を向上することができる。
この発明によれば、第2の移動動作時に、計時手段によって、第2の移動動作で被駆動体を基準位置に向けて移動を開始してから、電気抵抗判定手段で電気抵抗の検出値が一定の閾値以上になったと判定されるまでの間の閾値通過時間を取得し、抵抗指令位置データ変更手段によって、第2の抵抗指令値データを変更し、変更された第2の抵抗指令値データによって、第2の移動動作を続けることができる。
このため、閾値通過時間が異なる場合により適切な第2の抵抗指令値データを設定して、位置精度を向上することができる。例えば、閾値通過時間が長い場合、環境温度や支持体の温度が高温になっていると考えられるので、冷却時間をより長く設定し直す変更を行ってより位置精度を向上することができる。
請求項6に記載の発明では、電子機器において、請求項1〜5のいずれかに記載の形状記憶合金アクチュエータを備える構成とする。
この発明によれば、請求項1〜5のいずれかに記載の形状記憶合金アクチュエータを備えるので、請求項1〜5のいずれかに記載の発明と同様の作用効果を備える。
この発明によれば、請求項1〜5のいずれかに記載の形状記憶合金アクチュエータを備えるので、請求項1〜5のいずれかに記載の発明と同様の作用効果を備える。
本発明の形状記憶合金アクチュエータ、およびそれを備える電子機器によれば、第1および第2の移動動作における制御目標位置での形状記憶合金部材の温度差を低減することができるため、制御目標位置に対する位置精度のバラツキを低減することができるという効果を奏する。
以下では、本発明の実施形態について添付図面を参照して説明する。すべての図面において、実施形態が異なる場合であっても、同一または相当する部材には同一の符号を付し、共通する説明は省略する。
[第1の実施形態]
まず、本発明の第1の実施形態に係る形状記憶合金アクチュエータについて、それを備えた電子機器とともに説明する。
図1は、本発明の第1の実施形態に係る形状記憶合金アクチュエータを備える電子機器の概略構成を示す模式的な構成図である。図2は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの概略構成を示す模式的な正面図である。図3(a)は、形状記憶合金ワイヤの温度変化に伴う長さと電気抵抗の関係について説明する模式的なグラフである。横軸は形状記憶合金ワイヤの長さ、縦軸は形状記憶合金の電気抵抗を示す。図3(b)は、形状記憶合金ワイヤの温度変化に伴う電気抵抗の変化を示す模式的なグラフである。横軸は形状記憶合金ワイヤの温度、縦軸は形状記憶合金の電気抵抗を示す。図4は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの駆動制御部の機能ブロック図である。
まず、本発明の第1の実施形態に係る形状記憶合金アクチュエータについて、それを備えた電子機器とともに説明する。
図1は、本発明の第1の実施形態に係る形状記憶合金アクチュエータを備える電子機器の概略構成を示す模式的な構成図である。図2は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの概略構成を示す模式的な正面図である。図3(a)は、形状記憶合金ワイヤの温度変化に伴う長さと電気抵抗の関係について説明する模式的なグラフである。横軸は形状記憶合金ワイヤの長さ、縦軸は形状記憶合金の電気抵抗を示す。図3(b)は、形状記憶合金ワイヤの温度変化に伴う電気抵抗の変化を示す模式的なグラフである。横軸は形状記憶合金ワイヤの温度、縦軸は形状記憶合金の電気抵抗を示す。図4は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの駆動制御部の機能ブロック図である。
本実施形態のカメラ100(電子機器)は、例えば、デジタルスチルカメラ、ビデオカメラや、携帯電話、PDA(Personal Digital Assistants、個人用携帯端末)といったカメラ付情報機器などの撮像装置として好適となるものである。
カメラ100の概略構成は、図1に示すように、カメラ筐体20に、撮像レンズユニット3(被駆動体)、撮像素子21、液晶モニタ22、リリーススイッチ23、撮像制御部24、目標位置設定部25、および形状記憶合金(Shape Memory Alloy、以下、SMAと略称する)アクチュエータ1などが配置されてなる。SMAアクチュエータ1は、駆動機構部であるアクチュエータ本体10とアクチュエータ本体10の動作を制御する駆動制御部11とからなる。
カメラ100の概略構成は、図1に示すように、カメラ筐体20に、撮像レンズユニット3(被駆動体)、撮像素子21、液晶モニタ22、リリーススイッチ23、撮像制御部24、目標位置設定部25、および形状記憶合金(Shape Memory Alloy、以下、SMAと略称する)アクチュエータ1などが配置されてなる。SMAアクチュエータ1は、駆動機構部であるアクチュエータ本体10とアクチュエータ本体10の動作を制御する駆動制御部11とからなる。
撮像レンズユニット3は、被写体の像を撮像面に結像するもので、レンズ鏡筒に収められたレンズもしくはレンズ群からなる。本実施形態では、このレンズ鏡筒の中心軸Oが、撮像レンズユニット3の光軸に一致され、SMAアクチュエータ1によって、撮像系の光軸方向に沿って移動可能に保持されている。
撮像レンズユニット3のレンズ鏡筒の形状は、適宜の形状を採用することができるが、本実施形態では、図2に示すように、一例として、側面3aが、駆動方向に一致する上下方向に延ばされた、例えば円筒面からなり、側面3aの径方向外側に、撮像レンズユニット3の駆動方向の中心軸O回りの回転を規制するガイド突起3bが突出された形状の例で説明する。
撮像レンズユニット3のレンズ鏡筒の形状は、適宜の形状を採用することができるが、本実施形態では、図2に示すように、一例として、側面3aが、駆動方向に一致する上下方向に延ばされた、例えば円筒面からなり、側面3aの径方向外側に、撮像レンズユニット3の駆動方向の中心軸O回りの回転を規制するガイド突起3bが突出された形状の例で説明する。
撮像素子21は、撮像レンズユニット3を通して結像される光の像を光電変換するもので、例えば、CCDやCMOSセンサなどを採用することができる。
液晶モニタ22は、撮像素子21で光電変換された画像データや、カメラ100の操作や設定を行う操作画面などを表示する表示部である。
リリーススイッチ23は、不図示のシャッタを開放するための操作スイッチであり、撮像制御部24に電気的に接続されている。
また、リリーススイッチ23は、半押し操作によってオートフォーカス(以下、AFと略称する)動作を開始する制御信号を撮像制御部24に送出する。
液晶モニタ22は、撮像素子21で光電変換された画像データや、カメラ100の操作や設定を行う操作画面などを表示する表示部である。
リリーススイッチ23は、不図示のシャッタを開放するための操作スイッチであり、撮像制御部24に電気的に接続されている。
また、リリーススイッチ23は、半押し操作によってオートフォーカス(以下、AFと略称する)動作を開始する制御信号を撮像制御部24に送出する。
撮像制御部24は、カメラ100の装置動作全般を制御するもので、例えば、不図示のボタン、ダイヤル、スイッチなどの各種操作部の操作入力を受け付ける。そして、それらに基づいて撮像動作を制御し、液晶モニタ22への表示制御を行う。また、リリーススイッチ23からの操作入力を検出して、目標位置設定部25およびSMAアクチュエータ1からなるAF機構のAF動作を開始する制御を行う。
本実施形態のAF動作は、通称フライバック方式と言われる方式を採用している。すなわち、撮像レンズユニット3を、予め設定された駆動パターンにしたがって、フォーカス位置を含む範囲で基準位置から光軸方向の一方向に移動させるようなスキャン駆動(第1の移動動作)を行い、このスキャン駆動において、少なくともフォーカス位置の近傍で、フォーカス位置の前後にわたって画像を取得し、各画像の高調波成分の変化を解析し、最も高調波成分が強くなる位置をフォーカス位置Pfと判定し、撮像レンズユニット3を基準位置に戻してから、このフォーカス位置Pfに移動させるような目標位置駆動(第2の移動動作)を行う方式を採用している。
本実施形態のAF動作は、通称フライバック方式と言われる方式を採用している。すなわち、撮像レンズユニット3を、予め設定された駆動パターンにしたがって、フォーカス位置を含む範囲で基準位置から光軸方向の一方向に移動させるようなスキャン駆動(第1の移動動作)を行い、このスキャン駆動において、少なくともフォーカス位置の近傍で、フォーカス位置の前後にわたって画像を取得し、各画像の高調波成分の変化を解析し、最も高調波成分が強くなる位置をフォーカス位置Pfと判定し、撮像レンズユニット3を基準位置に戻してから、このフォーカス位置Pfに移動させるような目標位置駆動(第2の移動動作)を行う方式を採用している。
目標位置設定部25は、撮像制御部24および駆動制御部11に電気的に接続されており、撮像制御部24からの制御信号に応じて、駆動制御部11にAF動作を開始する制御信号を送出し、SMAアクチュエータ1によって撮像レンズユニット3をスキャン駆動し、撮像制御部24が撮像素子21から取得する画像を、周知のアルゴリズムによって順次画像解析し、評価値として各画像に含まれる高調波成分の強度等を算出し、これらの評価値を比較してフォーカス位置Pfを決定するものである。ここで決定されたフォーカス位置Pfは、AF動作における制御目標位置を確定するものである。
この確定されたフォーカス位置Pfの情報は、スキャン駆動時にフォーカス位置Pfに到達したときのSMAアクチュエータ1の駆動条件を特定できる情報とともに、目標位置設定部25によって駆動制御部11に通知される。
本実施形態では、目標位置設定部25は、SMAアクチュエータ1の駆動条件を特定できる情報として、スキャン駆動開始時からフォーカス位置Pfに到達するまでの移動時間tmを計測し、移動時間tmを駆動制御部11に通知するようにしている。
この確定されたフォーカス位置Pfの情報は、スキャン駆動時にフォーカス位置Pfに到達したときのSMAアクチュエータ1の駆動条件を特定できる情報とともに、目標位置設定部25によって駆動制御部11に通知される。
本実施形態では、目標位置設定部25は、SMAアクチュエータ1の駆動条件を特定できる情報として、スキャン駆動開始時からフォーカス位置Pfに到達するまでの移動時間tmを計測し、移動時間tmを駆動制御部11に通知するようにしている。
本実施形態のアクチュエータ本体10は、図2に示すように、柱状または筒状の撮像レンズユニット3を、駆動制御部11によって制御される通電量に応じて伸縮するSMAワイヤ5(形状記憶合金部材)を用いて1軸方向に沿って往復駆動できるようにしたものである。
アクチュエータ本体10の概略構成は、支持体2、SMAワイヤ5、保持端子4A、4B、および付勢手段6からなる。なお、図2は、全体の概略構成を説明する模式図であり、細部の形状は、省略されたり誇張されたりしている。
また、アクチュエータ本体10の配置姿勢は、図示の態様に限定されるものではないが、以下では、説明の便宜上、図示のように、撮像レンズユニット3がアクチュエータ本体10の上端側に設けられ、図示上下方向を駆動方向とする場合の例で説明する。
アクチュエータ本体10の概略構成は、支持体2、SMAワイヤ5、保持端子4A、4B、および付勢手段6からなる。なお、図2は、全体の概略構成を説明する模式図であり、細部の形状は、省略されたり誇張されたりしている。
また、アクチュエータ本体10の配置姿勢は、図示の態様に限定されるものではないが、以下では、説明の便宜上、図示のように、撮像レンズユニット3がアクチュエータ本体10の上端側に設けられ、図示上下方向を駆動方向とする場合の例で説明する。
支持体2は、平面視略矩形状の函体であり、上面側の中央部には、撮像レンズユニット3の側面3aを摺動可能に内嵌する平面視略円筒状のガイド面2aが設けられている。ガイド面2aには、撮像レンズユニット3のガイド突起3bを、支持体2の側面2b側に突出させるとともに駆動方向にガイドする、正面視U字状のガイド溝2eが径方向に貫通して設けられている。
支持体2の図示正面側の外周面である側面2bには、SMAワイヤ5の端部をそれぞれ保持して、張架するための保持端子4A、4Bが、撮像レンズユニット3の中心軸Oとガイド突起3bの中心を含む面(図示上下方向に延びる紙面垂直面)に対して、面対称に位置決めして取り付けられている。
支持体2の図示正面側の外周面である側面2bには、SMAワイヤ5の端部をそれぞれ保持して、張架するための保持端子4A、4Bが、撮像レンズユニット3の中心軸Oとガイド突起3bの中心を含む面(図示上下方向に延びる紙面垂直面)に対して、面対称に位置決めして取り付けられている。
支持体2の底面部2hには、底面部2hと対向する撮像レンズユニット3の下端部と底面部2hとの間に、駆動方向に沿った引張弾性力を付勢する付勢手段6が設けられている。
支持体2の材質は、電気絶縁体である適宜の合成樹脂やセラミックスなどを採用することができる。なお、通電部である保持端子4A、4B、SMAワイヤ5と接触する部分に電気絶縁処理を施す場合には、支持体2の基材として導電性を有する非金属や金属なども採用することができる。
支持体2の材質は、電気絶縁体である適宜の合成樹脂やセラミックスなどを採用することができる。なお、通電部である保持端子4A、4B、SMAワイヤ5と接触する部分に電気絶縁処理を施す場合には、支持体2の基材として導電性を有する非金属や金属なども採用することができる。
SMAワイヤ5は、温度に応じて伸縮方向の長さが記憶された導電性の形状記憶合金からなるワイヤであり、その両端部が、保持端子4A、4Bにそれぞれかしめられて、支持体2に固定されるとともに、保持端子4A、4B間に張架されたSMAワイヤ5の中間部が、ガイド突起3bに下方側から係止されている。保持端子4A、4B間のSMAワイヤ5の長さは、このカシメ時の温度で所定長さとなるように調整されている。
ここで、図3(a)、(b)を参照して、SMAワイヤ5に通電した場合の伸縮変化および温度変化について説明する。グラフ上の点qj(j=1,…,4)におけるSMAワイヤ5の温度、長さ、電気抵抗をそれぞれTj、Lj、rjで表す。
SMAワイヤ5に通電されていないときは、例えば室温などの基準温度T0とすると、点q0に示すように、SMAワイヤ5の長さ、電気抵抗は、それぞれL0、r0である。この長さL0で決まる撮像レンズユニット3の光軸方向の位置を基準位置と称する。
SMAワイヤ5に通電を開始するとSMAワイヤ5の電気抵抗に応じてジュール熱が発生し、温度上昇とともにSMAワイヤ5の電気抵抗が増加し、点q1において、変態開始温度T1に到達する。さらに通電を続けると、SMAワイヤ5は変態して収縮し、点q2を通る略直線状の曲線にしたがって長さ、電気抵抗が変化する。そのため、長さに略比例して電気抵抗が減少する。点q3を超えると変態が終了するため、通電とともに電気抵抗は増大していく。変態が終了する温度T3(ただし、T3>T0)に到達した点q3で、通電を停止するとSMAワイヤ5は放熱により冷却され、点q4を通る加熱時と異なる曲線に沿って長さが増大していく。
このとき、SMAワイヤ5の温度と、電気抵抗は、図3(b)に示すような温度ヒステリシス特性を有するものの、加熱時、冷却時、それぞれにおいて比例する領域を備えるため、SMAワイヤ5の電気抵抗を制御することによって、SMAワイヤ5の温度を制御し、長さを変化させることができる。
SMAワイヤ5に通電されていないときは、例えば室温などの基準温度T0とすると、点q0に示すように、SMAワイヤ5の長さ、電気抵抗は、それぞれL0、r0である。この長さL0で決まる撮像レンズユニット3の光軸方向の位置を基準位置と称する。
SMAワイヤ5に通電を開始するとSMAワイヤ5の電気抵抗に応じてジュール熱が発生し、温度上昇とともにSMAワイヤ5の電気抵抗が増加し、点q1において、変態開始温度T1に到達する。さらに通電を続けると、SMAワイヤ5は変態して収縮し、点q2を通る略直線状の曲線にしたがって長さ、電気抵抗が変化する。そのため、長さに略比例して電気抵抗が減少する。点q3を超えると変態が終了するため、通電とともに電気抵抗は増大していく。変態が終了する温度T3(ただし、T3>T0)に到達した点q3で、通電を停止するとSMAワイヤ5は放熱により冷却され、点q4を通る加熱時と異なる曲線に沿って長さが増大していく。
このとき、SMAワイヤ5の温度と、電気抵抗は、図3(b)に示すような温度ヒステリシス特性を有するものの、加熱時、冷却時、それぞれにおいて比例する領域を備えるため、SMAワイヤ5の電気抵抗を制御することによって、SMAワイヤ5の温度を制御し、長さを変化させることができる。
駆動制御部11の概略構成は、図4に示すように、通電制御部13、抵抗検出部14、目標位置到達検知部15、および抵抗指令値生成部12からなる。
通電制御部13は、保持端子4A、4Bを介してSMAワイヤ5の両端部に電気的に接続され、抵抗指令値生成部12から送出される抵抗指令値に基づいて、SMAワイヤ5の電気抵抗が抵抗指令値に一致するように、SMAワイヤ5に電力を供給するものである。
そのため、通電制御部13とSMAワイヤ5との間には、SMAワイヤ5の抵抗を検出する抵抗検出部14が設けられ、通電制御部13にSMAワイヤ5の電気抵抗が通電制御部13にフィードバックされるようになっている。
通電制御部13には、供給電力が制御可能な適宜の電源を採用することができるが、本実施形態では、パルス駆動によって、電力を可変するパルス電源を採用している。
抵抗検出部14は、SMAワイヤ5の電気抵抗を検出する適宜の抵抗測定回路を採用することができる。
そのため、通電制御部13とSMAワイヤ5との間には、SMAワイヤ5の抵抗を検出する抵抗検出部14が設けられ、通電制御部13にSMAワイヤ5の電気抵抗が通電制御部13にフィードバックされるようになっている。
通電制御部13には、供給電力が制御可能な適宜の電源を採用することができるが、本実施形態では、パルス駆動によって、電力を可変するパルス電源を採用している。
抵抗検出部14は、SMAワイヤ5の電気抵抗を検出する適宜の抵抗測定回路を採用することができる。
目標位置到達検知部15は、目標位置設定部25と電気的に接続され、撮像レンズユニット3のスキャン駆動において、目標位置設定部25が決定したフォーカス位置Pfの情報を目標位置設定部25から取得し、この情報から、フォーカス位置Pfに対応するスキャン駆動時の抵抗指令値を求め、抵抗指令値生成部12に送出するものである。
本実施形態では、目標位置到達検知部15は、フォーカス位置Pfの情報として、スキャン駆動開始時からフォーカス位置Pfに到達するまでの移動時間tmを取得するようになっている。このため、目標位置到達検知部15は、予め、後述する第1の抵抗指令値データ設定手段17からスキャン駆動において時間とともに変化する抵抗指令値の情報を第1の抵抗指令値データとして取得することで、移動時間tmに対応する抵抗指令値を特定できるようになっている。このようにして目標位置到達検知部15によって求められた抵抗指令値を目標候補抵抗指令値Rcと称することにする。目標候補抵抗指令値Rcは、スキャン駆動と同じ駆動を行う場合に、撮像レンズユニット3をフォーカス位置Pfに移動することができる抵抗指令値となっている。
本実施形態では、目標位置到達検知部15は、フォーカス位置Pfの情報として、スキャン駆動開始時からフォーカス位置Pfに到達するまでの移動時間tmを取得するようになっている。このため、目標位置到達検知部15は、予め、後述する第1の抵抗指令値データ設定手段17からスキャン駆動において時間とともに変化する抵抗指令値の情報を第1の抵抗指令値データとして取得することで、移動時間tmに対応する抵抗指令値を特定できるようになっている。このようにして目標位置到達検知部15によって求められた抵抗指令値を目標候補抵抗指令値Rcと称することにする。目標候補抵抗指令値Rcは、スキャン駆動と同じ駆動を行う場合に、撮像レンズユニット3をフォーカス位置Pfに移動することができる抵抗指令値となっている。
抵抗指令値生成部12は、第1の抵抗指令値データ設定手段17、第2の抵抗指令値データ設定手段18、抵抗指令値送出手段16、および記憶部19からなる。
第1の抵抗指令値データ設定手段17は、スキャン駆動を行うために、抵抗指令値が時間とともに低減されるような第1の抵抗指令値データを生成するものである。
第2の抵抗指令値データ設定手段18は、目標位置到達検知部15から目標候補抵抗指令値Rcを取得し、目標位置駆動を行うために、SMAワイヤ5に対する通電を低減もしくは停止する冷却時間tcの間、第1の抵抗指令値データの最小値よりも大きな抵抗指令値としてから、撮像レンズユニット3をフォーカス位置Pfに位置づけるための抵抗指令値である目標抵抗指令値Rfに変更するような第2の抵抗指令値データとを生成するものである。
抵抗指令値送出手段16は、第1の抵抗指令値データ設定手段17、第2の抵抗指令値データ設定手段18によって生成された第1および第2の抵抗指令値データを、目標位置設定部25からの制御信号に応じて、順次、通電制御部13に送出するものである。
記憶部19は、第1の抵抗指令値データ設定手段17、第2の抵抗指令値データ設定手段18が、第1、第2の抵抗指令値データをそれぞれ生成するためのパラメータをそれぞれから参照可能に記憶するものである。
第1の抵抗指令値データ設定手段17は、スキャン駆動を行うために、抵抗指令値が時間とともに低減されるような第1の抵抗指令値データを生成するものである。
第2の抵抗指令値データ設定手段18は、目標位置到達検知部15から目標候補抵抗指令値Rcを取得し、目標位置駆動を行うために、SMAワイヤ5に対する通電を低減もしくは停止する冷却時間tcの間、第1の抵抗指令値データの最小値よりも大きな抵抗指令値としてから、撮像レンズユニット3をフォーカス位置Pfに位置づけるための抵抗指令値である目標抵抗指令値Rfに変更するような第2の抵抗指令値データとを生成するものである。
抵抗指令値送出手段16は、第1の抵抗指令値データ設定手段17、第2の抵抗指令値データ設定手段18によって生成された第1および第2の抵抗指令値データを、目標位置設定部25からの制御信号に応じて、順次、通電制御部13に送出するものである。
記憶部19は、第1の抵抗指令値データ設定手段17、第2の抵抗指令値データ設定手段18が、第1、第2の抵抗指令値データをそれぞれ生成するためのパラメータをそれぞれから参照可能に記憶するものである。
記憶部19に記憶される第1の抵抗指令値データは、例えば、添字i(ただし、i=1,2,…,N、Nは3以上の整数)の増加に伴って、単調減少する数列Riからなる。数列Riの個数Nと、数列Riの差分値は、必要なオートフォーカスの位置精度に対応して決定する。数列Riの差分値は、一定値には限定されないが、本実施形態では一定値としている。
また、抵抗指令値R1は、SMAワイヤ5の変態開始温度T1に対応する電気抵抗r1よりも小さい大きさとされ、RNは、変態終了温度T3に対応する電気抵抗r3よりも大きい設定とされる。
抵抗指令値送出手段16は、これらの抵抗指令値Riを、i=1から、周期tsごとに、順次通電制御部13に送出する。
ここで、周期tsは、抵抗指令値を通電制御部13に送出してから、SMAワイヤ5の長さが安定し、その状態で撮像素子21によって画像が取得され、目標位置設定部25によって、画像の評価値が算出できる程度の時間に設定する。
また、抵抗指令値R1は、SMAワイヤ5の変態開始温度T1に対応する電気抵抗r1よりも小さい大きさとされ、RNは、変態終了温度T3に対応する電気抵抗r3よりも大きい設定とされる。
抵抗指令値送出手段16は、これらの抵抗指令値Riを、i=1から、周期tsごとに、順次通電制御部13に送出する。
ここで、周期tsは、抵抗指令値を通電制御部13に送出してから、SMAワイヤ5の長さが安定し、その状態で撮像素子21によって画像が取得され、目標位置設定部25によって、画像の評価値が算出できる程度の時間に設定する。
本実施形態の目標位置駆動は、第1の抵抗指令値データによるスキャン駆動と異なる駆動パターンに設定されるが、第2の抵抗指令値データ設定手段18では、冷却時間tcおよび目標抵抗指令値Rfの少なくともいずれかは、目標候補抵抗指令値Rcに応じて変化させることができるようになっており、これにより、スキャン駆動において、フォーカス位置Pfに到達したときのSMAワイヤ5の温度と、目標位置駆動において、撮像レンズユニット3をフォーカス位置Pfに位置づけられるときのSMAワイヤ5の温度との差を低減し、位置バラツキが低減できるようにしている。
すなわち、目標抵抗指令値Rfは、目標候補抵抗指令値Rcに応じた補正値ΔRを、目標候補抵抗指令値Rcに加算することで生成され、冷却時間tcは、目標候補抵抗指令値Rcに応じて異なる値に設定できるようになっている。
記憶部19には、目標候補抵抗指令値となりうる、第1の抵抗指令値データの各抵抗指令値Riに対応して、それぞれ、補正値ΔRiのデータ、冷却時間tcのデータが記憶されている。
すなわち、目標抵抗指令値Rfは、目標候補抵抗指令値Rcに応じた補正値ΔRを、目標候補抵抗指令値Rcに加算することで生成され、冷却時間tcは、目標候補抵抗指令値Rcに応じて異なる値に設定できるようになっている。
記憶部19には、目標候補抵抗指令値となりうる、第1の抵抗指令値データの各抵抗指令値Riに対応して、それぞれ、補正値ΔRiのデータ、冷却時間tcのデータが記憶されている。
このような駆動制御部11の装置構成は、上記に説明した各機能に対応する専用のハードウエアから構成してもよいし、CPU、メモリ、外部記憶装置、適宜の入出力インターフェースなどを備えたコンピュータに各機能を実現するプログラムを実行させることによって実現してもよい。
なお、撮像制御部24あるいは目標位置設定部25をコンピュータで構成する場合には、撮像制御部24あるいは目標位置設定部25に用いるコンピュータを駆動制御部11に兼用してもよい。
なお、撮像制御部24あるいは目標位置設定部25をコンピュータで構成する場合には、撮像制御部24あるいは目標位置設定部25に用いるコンピュータを駆動制御部11に兼用してもよい。
次に、カメラ100の動作について、SMAアクチュエータ1を用いたオートフォーカス動作を中心に説明する。
図5(a)は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの動作の一例を示す模式的なグラフである。図5(b)は、図5(a)の動作を行うための抵抗指令値データの一例(データ例1)を示す模式的なグラフである。図6(a)は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの動作の他例を示す模式的なグラフである。図6(b)は、図6(a)の動作を行うための抵抗指令値データの他例(データ例2)を示す模式的なグラフである。図5(a)、図6(a)において、横軸は時間、縦軸は形状記憶合金アクチュエータの移動量に対応するレンズ位置を示す。図5(b)、図6(b)において、横軸は時間、縦軸は抵抗指令値を示す。
図5(a)は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの動作の一例を示す模式的なグラフである。図5(b)は、図5(a)の動作を行うための抵抗指令値データの一例(データ例1)を示す模式的なグラフである。図6(a)は、本発明の第1の実施形態に係る形状記憶合金アクチュエータの動作の他例を示す模式的なグラフである。図6(b)は、図6(a)の動作を行うための抵抗指令値データの他例(データ例2)を示す模式的なグラフである。図5(a)、図6(a)において、横軸は時間、縦軸は形状記憶合金アクチュエータの移動量に対応するレンズ位置を示す。図5(b)、図6(b)において、横軸は時間、縦軸は抵抗指令値を示す。
本実施形態のカメラ100では、撮影者がリリーススイッチ23を半押しすると撮像制御部24によって目標位置設定部25に制御信号が送出され、AF動作が開始される。
目標位置設定部25は、駆動制御部11の抵抗指令値生成部12に対してスキャン動作を開始する制御信号を送出する。
抵抗指令値生成部12では、抵抗指令値送出手段16から第1の抵抗指令値データ設定手段17に制御信号を送って、第1の抵抗指令値データを生成させる。
すなわち、第1の抵抗指令値データ設定手段17は、記憶部19に記憶された第1の抵抗指令値データを呼び出す。抵抗指令値送出手段16は、第1の抵抗指令値データ設定手段17から、周期tsごとに抵抗指令値Riを順次読み込み、通電制御部13に送出する。
記憶部19に、記憶されるデータテーブルの一例(N=8)を表1に示す。
目標位置設定部25は、駆動制御部11の抵抗指令値生成部12に対してスキャン動作を開始する制御信号を送出する。
抵抗指令値生成部12では、抵抗指令値送出手段16から第1の抵抗指令値データ設定手段17に制御信号を送って、第1の抵抗指令値データを生成させる。
すなわち、第1の抵抗指令値データ設定手段17は、記憶部19に記憶された第1の抵抗指令値データを呼び出す。抵抗指令値送出手段16は、第1の抵抗指令値データ設定手段17から、周期tsごとに抵抗指令値Riを順次読み込み、通電制御部13に送出する。
記憶部19に、記憶されるデータテーブルの一例(N=8)を表1に示す。
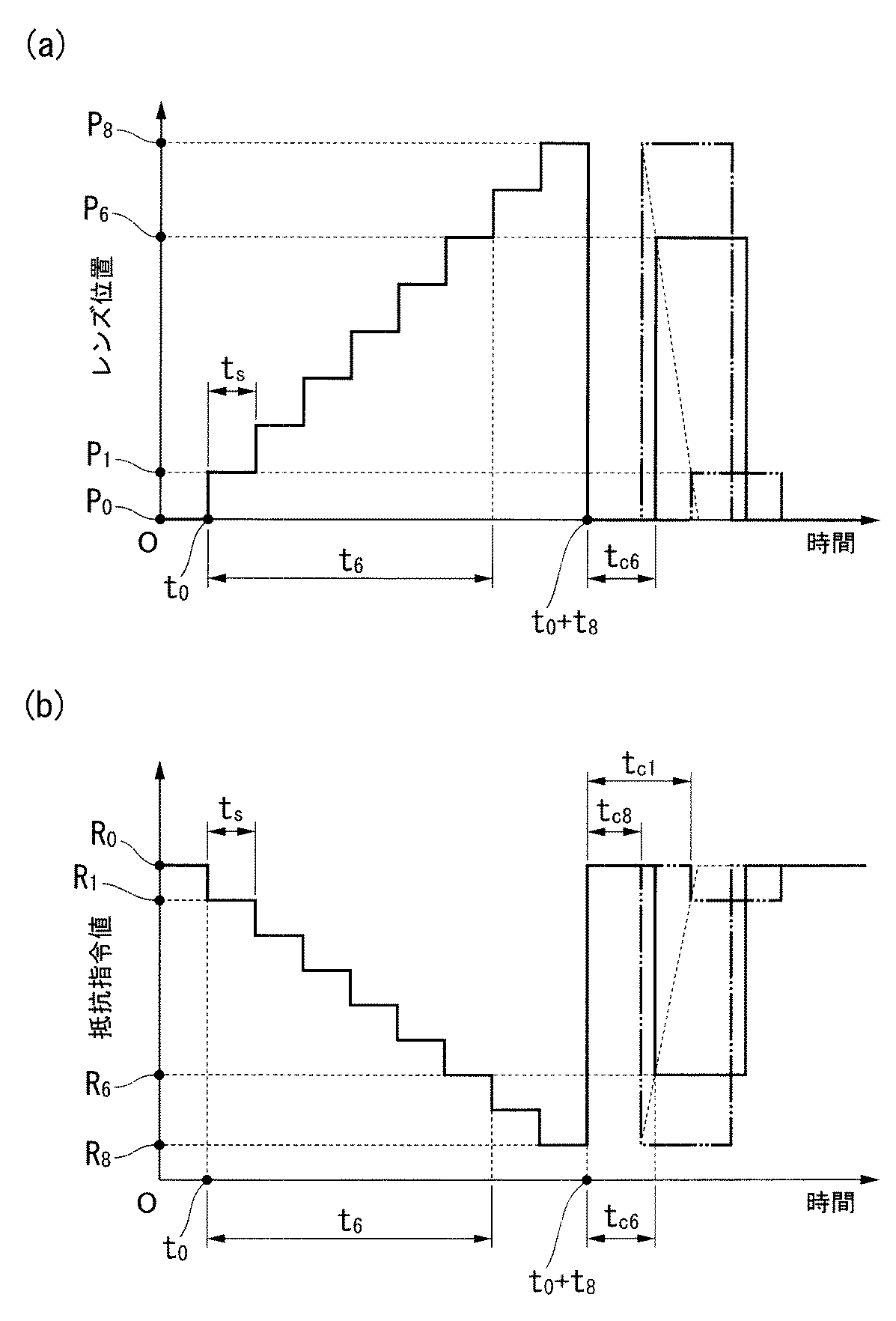
表1において、レンズ位置は、スキャン駆動において基準位置から順次移動させる位置を、P1、P2、…、P8(ただし、Pj<Pj+1、j=1,…、7)で表している。これらに対応する時間は、レンズ位置Pi(i=1,…,8)に対応する時間tiは、基準位置から移動を開始してから、レンズ位置Piに到達し、レンズ位置Piから位置を変更開始するまでの間の時間を示す。
表1の抵抗指令値の「スキャン駆動時」欄は、第1の抵抗指令値データの一例を示している。
表1の抵抗指令値の「スキャン駆動時」欄は、第1の抵抗指令値データの一例を示している。
この場合、スキャン駆動時では、図5(b)に示すように、抵抗指令値Riが、表1にしたがって、時刻t0から周期tsごとに、26.0Ω、25.5Ω、…、22.5Ωのように、順次変化される。なお、図5(b)で、R0は、抵抗指令値R0=r0に設定するか、もしくは、SMAワイヤ5への通電をオフに設定することを意味する。簡単のため、以下では、どちらの場合も、抵抗指令値をR0に設定すると言うことにする。
通電制御部13では、SMAワイヤ5の電気抵抗を抵抗検出部14によって検出、フィードバックして、SMAワイヤ5の電気抵抗が各抵抗指令値に一致するように、SMAワイヤ5に通電する電力の制御を行う。
これによって、SMAワイヤ5に発生するジュール熱が制御され、SMAワイヤ5が漸次加熱され、図3(a)に示すSMAワイヤ5の特性にしたがって、SMAワイヤ5が収縮する。そのため、撮像レンズユニット3が光軸方向の一方向(図2の上方向)に移動される。
したがって、撮像レンズユニット3は、図5(a)に示すように、レンズ位置P1、…、P8のように,一方向に移動される。
通電制御部13では、SMAワイヤ5の電気抵抗を抵抗検出部14によって検出、フィードバックして、SMAワイヤ5の電気抵抗が各抵抗指令値に一致するように、SMAワイヤ5に通電する電力の制御を行う。
これによって、SMAワイヤ5に発生するジュール熱が制御され、SMAワイヤ5が漸次加熱され、図3(a)に示すSMAワイヤ5の特性にしたがって、SMAワイヤ5が収縮する。そのため、撮像レンズユニット3が光軸方向の一方向(図2の上方向)に移動される。
したがって、撮像レンズユニット3は、図5(a)に示すように、レンズ位置P1、…、P8のように,一方向に移動される。
一方、各抵抗指令値Riが一定値をとる周期tsの間に、目標位置設定部25は、撮像素子21から被写体の画像を取得するとともに、この時点における時刻t0からの移動時間tmiを計測し記憶する。
また、取得画像に対して画像解析を行って、フォーカス位置を判定する評価値を算出する。
そして、最後のレンズ位置P8の評価値が取得されると、目標位置設定部25は、各評価値を比較して、評価値の変化からフォーカス位置Pfを決定する。例えば、レンズ位置P6に決定されたものとする。
目標位置設定部25は、抵抗指令値生成部12にフォーカス位置が決定されたことを通知するとともに、フォーカス位置Pfに対応して、目標位置到達検知部15に移動時間tm=tm6として送出する。この場合、t5<tm≦t6である。
また、取得画像に対して画像解析を行って、フォーカス位置を判定する評価値を算出する。
そして、最後のレンズ位置P8の評価値が取得されると、目標位置設定部25は、各評価値を比較して、評価値の変化からフォーカス位置Pfを決定する。例えば、レンズ位置P6に決定されたものとする。
目標位置設定部25は、抵抗指令値生成部12にフォーカス位置が決定されたことを通知するとともに、フォーカス位置Pfに対応して、目標位置到達検知部15に移動時間tm=tm6として送出する。この場合、t5<tm≦t6である。
目標位置到達検知部15では、目標位置設定部25から送出された移動時間tmが、t5<tm≦t6であることから、目標候補抵抗指令値Rcは、レンズ位置P6に対応する抵抗指令値R6であると判断し、第2の抵抗指令値データ設定手段18に通知する。
一方、抵抗指令値生成部12では、フォーカス位置Pfの決定を受けると、抵抗指令値送出手段16は、第2の抵抗指令値データ設定手段18に第2の抵抗指令値データを生成させる。
[データ例1]
第2の抵抗指令値データの一例について、表1に示すデータ例1の場合で説明する。
第2の抵抗指令値データ設定手段18では、目標位置到達検知部15から通知される目標候補抵抗指令値RcがR6であるため、記憶部19に記憶された表1のようなデータから、補正値ΔR、冷却時間tcとして、ΔR6=0(Ω)、tc6=75(msec)を選択する。
そして、抵抗指令値送出手段16からの制御信号に応じて、図5(b)に示すように、時刻(t0+t8)に、第1の抵抗指令値データの最小値R8を、抵抗指令値R0に変更し、時刻(t0+t8+tc)で、目標抵抗指令値を、Rf6=R6+ΔR6=R6に設定して、所定時間だけ保持してから、R0に変更するような第2の抵抗指令値データを生成する。この第2の抵抗指令値データは、抵抗指令値送出手段16によって、通電制御部13に送出され、撮像レンズユニット3が、目標位置駆動される。
第2の抵抗指令値データの一例について、表1に示すデータ例1の場合で説明する。
第2の抵抗指令値データ設定手段18では、目標位置到達検知部15から通知される目標候補抵抗指令値RcがR6であるため、記憶部19に記憶された表1のようなデータから、補正値ΔR、冷却時間tcとして、ΔR6=0(Ω)、tc6=75(msec)を選択する。
そして、抵抗指令値送出手段16からの制御信号に応じて、図5(b)に示すように、時刻(t0+t8)に、第1の抵抗指令値データの最小値R8を、抵抗指令値R0に変更し、時刻(t0+t8+tc)で、目標抵抗指令値を、Rf6=R6+ΔR6=R6に設定して、所定時間だけ保持してから、R0に変更するような第2の抵抗指令値データを生成する。この第2の抵抗指令値データは、抵抗指令値送出手段16によって、通電制御部13に送出され、撮像レンズユニット3が、目標位置駆動される。
本実施形態では、第2の抵抗指令値データを生成するための補正値ΔR、冷却時間tcは、少なくともいずれかが、目標候補抵抗指令値Rcに応じて変化されている。
本例では、表1に示すように、補正値ΔRiは一定値0Ωとし、時間tiに応じて、冷却時間tciを300msecから50msecまで、広義単調減少して変化する設定としている。すなわち、冷却時間tc1、tc2が300msecで等しく、冷却時間tc3からtc6が、250msec、200msec、100msec、75msecのように減少し、冷却時間tc7、tc8が50msecで等しくなっている。
本例では、表1に示すように、補正値ΔRiは一定値0Ωとし、時間tiに応じて、冷却時間tciを300msecから50msecまで、広義単調減少して変化する設定としている。すなわち、冷却時間tc1、tc2が300msecで等しく、冷却時間tc3からtc6が、250msec、200msec、100msec、75msecのように減少し、冷却時間tc7、tc8が50msecで等しくなっている。
例えば、目標候補抵抗指令値Rcが、R1、R8の場合を比べると、スキャン駆動において、発生する熱エネルギーは、目標候補抵抗指令値Rcに応じて異なっている。SMAワイヤ5に発生するジュール熱は、一部がSMAワイヤ5から空気中に放熱され、その残りがSMAワイヤ5の端部から保持端子4A、4B、支持体2などの固体部材に伝熱される。このうち、固体部材への伝熱分は、固体部材の熱容量に応じて徐々に蓄熱され、SMAワイヤ5の端部での冷却効率を悪化させ、端部がより高温になる傾向にある。そのため、目標候補抵抗指令値Rcが小さいほど、SMAワイヤ5上への蓄熱量も多くなっている。
時間t8におけるSMAワイヤ5の温度は、このような蓄熱分も寄与しているため、充分に冷却された状態で基準位置から抵抗指令値をR8に設定した場合SMAワイヤ5の温度よりも高温になっている。このため、冷却時間tc8が長すぎると、収縮量が少なすぎて、制御目標位置からずれてしまうことになる。
これに対して、目標位置駆動で、抵抗指令値R1に設定する場合は、t1<t8なので、蓄熱がより少なく、冷却時間tc1は長くとる方が良好な位置再現性が得られる。
これに対して、目標位置駆動で、抵抗指令値R1に設定する場合は、t1<t8なので、蓄熱がより少なく、冷却時間tc1は長くとる方が良好な位置再現性が得られる。
そこで本例では、冷却時間tcm(m=1,…,7)は、抵抗指令値Rn(nは、n>mの整数)に対応する冷却時間tcnとの間で、tcm≧tcnの関係にあるように設定して変化させている。ここで、tcm=tcnとしているデータは、冷却時間を変化させなくとも、良好な位置再現性が得られる場合であり、すべての冷却時間tcを一定にする設定は除くものとする。
データ例1における位置再現性を評価するため、スキャン駆動で制御目標位置がPiになったとき、目標位置駆動における制御目標位置の各レンズ位置Piに対する偏差を実験によって求めたところ、5μmの範囲であることが分かった。
一方、比較例1、2として、冷却時間を、tc=300(msec)、50(msec)に固定して同様に実験した場合には、それぞれの偏差は、10μm、12μmとなり、データ例1の場合に比べて劣ることが分かった。
一方、比較例1、2として、冷却時間を、tc=300(msec)、50(msec)に固定して同様に実験した場合には、それぞれの偏差は、10μm、12μmとなり、データ例1の場合に比べて劣ることが分かった。
なお、表1中の数値は一例であり、SMAアクチュエータ1の大きさや駆動範囲など、種々の機械的、熱的条件に応じて適宜設定することができる。例えば、SMAアクチュエータ1の温度分布をシミュレーションしたり、実験を行ったりすることで、スキャン駆動と目標位置駆動とで、制御目標位置に到達したときにSMAワイヤ5の温度差が低減される条件から、設定することができる。
[データ例2]
次に、第2の抵抗指令値データの他例について、表2に示すデータ例2の場合で説明する。本例は、抵抗指令値Riに応じて、冷却時間tciを一定値として、補正値ΔRiを変化させることで、データ例1と同様なレンズ位置Piに対する位置再現性を実現できるようにした場合の例である。
次に、第2の抵抗指令値データの他例について、表2に示すデータ例2の場合で説明する。本例は、抵抗指令値Riに応じて、冷却時間tciを一定値として、補正値ΔRiを変化させることで、データ例1と同様なレンズ位置Piに対する位置再現性を実現できるようにした場合の例である。
表2の各列の意味は、表1と同一である。また、表2の抵抗指令値の「スキャン駆動時」欄は、表1の第1の抵抗指令値データに一致している。
本例では、冷却時間tciは一定値50msecとし、時間tiに応じて、補正値ΔRiを0.3Ωから0Ωまで、広義単調減少して変化する設定としている。すなわち、補正値ΔR1、ΔR2が0.3Ω、補正値ΔR3、ΔR4が0.2Ω、補正値ΔR5、ΔR6が0.1Ω、補正値ΔR7、ΔR8が0Ωのように減少されている。
上記と同様に、スキャン駆動を行った結果、目標位置到達検知部15から通知される目標候補抵抗指令値RcがR6であるとする。このとき、第2の抵抗指令値データ設定手段18は、記憶部19に記憶された表2のようなデータから、補正値ΔR、冷却時間tcとして、ΔR6=0.1(Ω)、tc6=50(msec)を選択し、上記と同様にして、第2の抵抗指令値データを生成する。この第2の抵抗指令値データでは、目標抵抗指令値は、Rf6=R6+ΔR6=23.6Ωである。そして、この第2の抵抗指令値データは、抵抗指令値送出手段16によって、通電制御部13に送出され、撮像レンズユニット3が第2の抵抗指令値データにしたがって目標位置駆動される。
例えば、目標抵抗指令値が、Rf1、Rf8の場合を比べると、いずれも冷却時間tcは50msecのため、Rf8は、上記のように、R8とすることで、レンズ位置P8に良好な精度で移動される。一方、Rf1で駆動する場合、冷却時間tcが短すぎるため、駆動開始時に蓄熱量が大きくなっており、目標抵抗指令値Rf1をR1にすると、SMAワイヤ5の温度が上がりすぎてしまい、移動位置精度が悪化してしまう。そこで、目標抵抗指令値Rf1は、R1に補正値ΔR1=0.3(Ω)を加算することで、スキャン駆動時の温度に対する温度差を低減するようにしている。
そこで本例では、補正値ΔRm(m=1,…,7)は、抵抗指令値Rn(nは、n>mの整数)に対応する補正値ΔRnとの間で、ΔRm≧ΔRnの関係にあるように設定して変化させている。ここで、ΔRm=ΔRnとしているデータは、補正値を変化させなくとも、良好な位置再現性が得られる場合であり、すべての補正値ΔRを一定にする設定は除くものとする。
データ例2における位置再現性を評価するため、スキャン駆動で制御目標位置がPiになったとき、目標位置駆動における制御目標位置の各レンズ位置Piに対する偏差を実験によって求めたところ、5μmの範囲であった。したがって、データ例2は、データ例1と同等の位置再現性を有する。
すなわち、補正値ΔR、冷却時間tcが固定された、上記の比較例1、2に比べて、良好な位置再現性が得られた。
なお、表2中の数値は一例であり、SMAアクチュエータ1の大きさや駆動範囲など、種々の機械的、熱的条件に応じて適宜設定することができることは、データ例1の場合と同様である。
すなわち、補正値ΔR、冷却時間tcが固定された、上記の比較例1、2に比べて、良好な位置再現性が得られた。
なお、表2中の数値は一例であり、SMAアクチュエータ1の大きさや駆動範囲など、種々の機械的、熱的条件に応じて適宜設定することができることは、データ例1の場合と同様である。
このように、本実施形態のカメラ100のSMAアクチュエータ1では、目標抵抗指令値Rfを、スキャン駆動で求められた目標候補抵抗指令値Rcに補正値ΔRを加算して生成するとともに、目標候補抵抗指令値Rcに応じて、第2の抵抗指令値データを生成するための補正値ΔRおよび冷却時間tcの少なくともいずれかを変化させるので、スキャン駆動終了後のSMAワイヤ5の温度が目標候補抵抗指令値Rcに応じてばらついても、スキャン駆動および目標位置駆動における制御目標位置での形状記憶合金部材の温度差を低減することができるため、制御目標位置に対する位置精度のバラツキを低減することができる。
[第2の実施形態]
まず、本発明の第2の実施形態に係る形状記憶合金アクチュエータについて説明する。
図7は、本発明の第2の実施形態に係る形状記憶合金アクチュエータの機能ブロック図である。図8(a)は、本発明の第2の実施形態に係る形状記憶合金アクチュエータの動作の一例を示す模式的なグラフである。横軸は時間、縦軸は形状記憶合金アクチュエータの移動量に対応するレンズ位置を示す。図8(b)は、図8(a)の動作を行うための抵抗指令値データの一例を示す模式的なグラフである。横軸は時間、縦軸は抵抗指令値を示す。
まず、本発明の第2の実施形態に係る形状記憶合金アクチュエータについて説明する。
図7は、本発明の第2の実施形態に係る形状記憶合金アクチュエータの機能ブロック図である。図8(a)は、本発明の第2の実施形態に係る形状記憶合金アクチュエータの動作の一例を示す模式的なグラフである。横軸は時間、縦軸は形状記憶合金アクチュエータの移動量に対応するレンズ位置を示す。図8(b)は、図8(a)の動作を行うための抵抗指令値データの一例を示す模式的なグラフである。横軸は時間、縦軸は抵抗指令値を示す。
本実施形態のSMAアクチュエータ1Aは、図1、2に示すように、カメラ100のAF機構に用いることができるもので、上記第1の実施形態のSMAアクチュエータ1の駆動制御部11に代えて、駆動制御部11Aを備える。
駆動制御部11Aは、図7に示すように、上記第1の実施形態の駆動制御部11の抵抗指令値生成部12に代えて抵抗指令値生成部12Aを備えるものである。
抵抗指令値生成部12Aは、上記第1の実施形態の抵抗指令値生成部12の抵抗指令値送出手段16に代えて、抵抗指令値送出手段16Aを備え、さらに、電気抵抗値判定手段30Aを追加したものである。
駆動制御部11Aは、図7に示すように、上記第1の実施形態の駆動制御部11の抵抗指令値生成部12に代えて抵抗指令値生成部12Aを備えるものである。
抵抗指令値生成部12Aは、上記第1の実施形態の抵抗指令値生成部12の抵抗指令値送出手段16に代えて、抵抗指令値送出手段16Aを備え、さらに、電気抵抗値判定手段30Aを追加したものである。
電気抵抗判定手段30Aは、抵抗検出部14、抵抗指令値送出手段16Aに電気的に接続され、抵抗検出部14からSMAワイヤ5の電気抵抗の検出値を取得して、この電気抵抗の検出値が予め設定された閾値Rth以下になったかどうか判定して、閾値Rth以下になった場合に、抵抗指令値送出手段16にそのことを通知するものである。
閾値Rthは、図8(b)に示すように、R0>Rth>R1の範囲で、撮像レンズユニット3が基準位置に位置するSMAワイヤ5の長さが得られる抵抗指令値の近傍値に設定される。
閾値Rthは、図8(b)に示すように、R0>Rth>R1の範囲で、撮像レンズユニット3が基準位置に位置するSMAワイヤ5の長さが得られる抵抗指令値の近傍値に設定される。
抵抗指令値送出手段16Aは、上記第1の実施形態と同様に、第1の抵抗指令値データ設定手段17で設定された第1の抵抗指令値データを通電制御部13に送出してスキャン駆動を行い、その後、上記第1の実施形態と同様にして、第2の抵抗指令値データ設定手段18で設定された第2の抵抗指令値データを通電制御部13に送出して、目標位置駆動を行うものである。第2の抵抗指令値データは、データ例1、2のいずれのタイプでもよい。
そして、抵抗指令値送出手段16Aでは、目標位置駆動を開始するとともに、電気抵抗判定手段30Aからの通知を監視し、電気抵抗判定手段30Aから、SMAワイヤ5の電気抵抗が閾値Rth以上になったという通知を受けると、その時点から、第2の抵抗指令値データ設定手段18で設定された第2の抵抗指令値データを先頭に戻って通電制御部13に送出するようにする。
そして、抵抗指令値送出手段16Aでは、目標位置駆動を開始するとともに、電気抵抗判定手段30Aからの通知を監視し、電気抵抗判定手段30Aから、SMAワイヤ5の電気抵抗が閾値Rth以上になったという通知を受けると、その時点から、第2の抵抗指令値データ設定手段18で設定された第2の抵抗指令値データを先頭に戻って通電制御部13に送出するようにする。
本実施形態のSMAアクチュエータ1Aは、装置固有の熱容量などによって、繰り返し駆動を行う場合の蓄熱による温度変化に加えて、例えば、装置が置かれた環境温度などのノイズに起因する駆動位置バラツキを低減できるようにしたものである。
例えば、環境温度が上昇すると、SMAワイヤ5から空気中への放熱効率が悪くなるため、SMAワイヤ5が冷却されにくくなる。
そのため、例えば、図8(b)に示すように、第1の抵抗指令値データから第2の抵抗指令値データに切り替える際に、点a(t0+t8,R8)から、点b(t0+t8,R0)のように、抵抗指令値を切り替えた場合、SMAワイヤ5の温度が、抵抗指令値の変化あるいは通電の停止に追従して急峻には冷却されず、遅延時間が生じる。そのため、撮像レンズユニット3の位置は、例えば、環境温度に変化がない場合に、抵抗指令値が図8(b)に点aから点c(tth,Rth)(ただし、tth>t0+t8)を通る曲線204のように変化したかのように、図8(a)に曲線200で示すように、時刻(t0+t8)からある程度の時間をかけて変化していく。
したがって、実質的な冷却時間が減少するため、冷却時間tcを前提として設定された目標抵抗指令値Rfでは、位置ずれが発生する。
例えば、環境温度が上昇すると、SMAワイヤ5から空気中への放熱効率が悪くなるため、SMAワイヤ5が冷却されにくくなる。
そのため、例えば、図8(b)に示すように、第1の抵抗指令値データから第2の抵抗指令値データに切り替える際に、点a(t0+t8,R8)から、点b(t0+t8,R0)のように、抵抗指令値を切り替えた場合、SMAワイヤ5の温度が、抵抗指令値の変化あるいは通電の停止に追従して急峻には冷却されず、遅延時間が生じる。そのため、撮像レンズユニット3の位置は、例えば、環境温度に変化がない場合に、抵抗指令値が図8(b)に点aから点c(tth,Rth)(ただし、tth>t0+t8)を通る曲線204のように変化したかのように、図8(a)に曲線200で示すように、時刻(t0+t8)からある程度の時間をかけて変化していく。
したがって、実質的な冷却時間が減少するため、冷却時間tcを前提として設定された目標抵抗指令値Rfでは、位置ずれが発生する。
本実施形態の構成によれば、抵抗指令値送出手段16Aは、電気抵抗判定手段30AによってSMAワイヤ5の電気抵抗を検出し、十分温度が下がったのを確認してから、第2の抵抗指令値データを先頭に戻して、通電制御部13に送出するので、冷却時間tcを確実とることができるため、環境温度の変化などが発生しても、上記第1の実施形態と略同様の駆動位置精度を実現することができる。
なお、閾値Rthは、R0に近づくほど、確実に冷却時間tcを確保することができるが、R0に近づくほど、SMAワイヤ5の温度変化に対応して、電気抵抗の変化率が減少して、待ち時間が長くなりすぎたり、待ち時間のバラツキが大きくなったりするので、駆動制御時間の長さと駆動位置精度とのバランスを考慮して設定する。
次に、本実施形態の変形例について説明する。
本変形例のSMAアクチュエータ1Bは、図1、2に示すように、カメラ100のAF機構に用いることができるもので、上記第2の実施形態のSMAアクチュエータ1Aの駆動制御部11Aに代えて、駆動制御部11Bを備える。
駆動制御部11Bは、図7に示すように、上記第2の実施形態の駆動制御部11Aの抵抗指令値生成部12Aに代えて抵抗指令値生成部12Bを備えるものである。
抵抗指令値生成部12Bは、上記第2の実施形態の抵抗指令値生成部12Aの抵抗指令値送出手段16A、第2の抵抗指令値データ設定手段18に代えて、抵抗指令値送出手段16B、第2の抵抗指令値データ設定手段18Bを備えるものである。
本変形例のSMAアクチュエータ1Bは、図1、2に示すように、カメラ100のAF機構に用いることができるもので、上記第2の実施形態のSMAアクチュエータ1Aの駆動制御部11Aに代えて、駆動制御部11Bを備える。
駆動制御部11Bは、図7に示すように、上記第2の実施形態の駆動制御部11Aの抵抗指令値生成部12Aに代えて抵抗指令値生成部12Bを備えるものである。
抵抗指令値生成部12Bは、上記第2の実施形態の抵抗指令値生成部12Aの抵抗指令値送出手段16A、第2の抵抗指令値データ設定手段18に代えて、抵抗指令値送出手段16B、第2の抵抗指令値データ設定手段18Bを備えるものである。
抵抗指令値送出手段16Bは、上記第1の実施形態と同様に、第1の抵抗指令値データ設定手段17で設定された第1の抵抗指令値データを通電制御部13に送出してスキャン駆動を行い、その後、第2の抵抗指令値データ設定手段18Bで設定された第2の抵抗指令値データを通電制御部13に送出して、目標位置駆動を行うものである。第2の抵抗指令値データは、データ例1、2のいずれのタイプでもよい。
そして、抵抗指令値送出手段16Bは、例えばカウンタなどからなる不図示の計時手段を内蔵しており、目標位置駆動を開始するとともに、計時手段によって計時しながら、電気抵抗判定手段30Aからの通知を監視する。そして、電気抵抗判定手段30Aから、SMAワイヤ5の電気抵抗が閾値Rth以上になったという通知を受けると(時刻tth)、目標位置駆動開始時(時刻(t0+t8))からの経過時間である閾値通過時間Δt=tth−t0−t8を算出する。
そして、抵抗指令値送出手段16Bは、例えばカウンタなどからなる不図示の計時手段を内蔵しており、目標位置駆動を開始するとともに、計時手段によって計時しながら、電気抵抗判定手段30Aからの通知を監視する。そして、電気抵抗判定手段30Aから、SMAワイヤ5の電気抵抗が閾値Rth以上になったという通知を受けると(時刻tth)、目標位置駆動開始時(時刻(t0+t8))からの経過時間である閾値通過時間Δt=tth−t0−t8を算出する。
一方、第2の抵抗指令値データ設定手段18Bは、上記第1の実施形態の第2の抵抗指令値データ設定手段18と同様な第2の抵抗指令値データを生成する構成を有しており、さらに、抵抗指令値送出手段16Bで、閾値通過時間Δtが、所定値以上となった場合に、閾値通過時間Δtの大きさに応じて、すでに生成し通電制御部13に送出しつつある第2の抵抗指令値データを、補正値ΔR、冷却時間tcの少なくともいずれかを変化させて、新たに生成した第2の抵抗指令値データを生成して、通電制御部13に送出する抵抗指令値変更手段を備えている。
本実施形態のSMAアクチュエータ1Bは、閾値通過時間Δtが、例えば環境温度などのノイズ要因によって、大きく変化する場合に、単に、目標候補抵抗指令値Rcに応じて設定された第2の抵抗指令値データを先頭に戻して送出する以外に、閾値通過時間Δtに応じて、最初に設定したのと異なる第2の抵抗指令値データに変更して駆動を行えるようにしたものである。
このような第2の抵抗指令値データの例としては、例えば、閾値通過時間Δtが、ある程度以上大きくなった場合により大きな冷却時間tcを確保できるように、閾値通過時間Δtの大きさを段階的に区分けして、それぞれに異なる冷却時間tcを割り当てるといった例を挙げることができる。
このような第2の抵抗指令値データの例としては、例えば、閾値通過時間Δtが、ある程度以上大きくなった場合により大きな冷却時間tcを確保できるように、閾値通過時間Δtの大きさを段階的に区分けして、それぞれに異なる冷却時間tcを割り当てるといった例を挙げることができる。
なお、上記の説明では、上記第1の実施形態でデータ例1、2として示したように、第2の抵抗指令値データを、目標候補抵抗指令値に応じて、補正値、または冷却時間を変更した場合の例で説明したが、補正値および冷却時間を変化させてもよい。
また、上記の説明では、第2の抵抗指令値データにおいて、冷却時間の間の抵抗指令値を、第1の抵抗指令値データの最小値から、R0もしくは通電の停止状態に設定するとともに、冷却時間の終了とともに、R0もしくは通電の停止状態から、制御目標値に位置づけるための目標抵抗指令値にステップ状に設定する場合の例で説明したが、それぞれの間で、抵抗指令値を漸次変化させるようにしてもよい。この場合、冷却時間は、それぞれの漸次変化の通電量に応じた蓄熱量を考慮して設定する。
また、上記の説明では、撮像素子21からの画像に基づいて目標位置設定部25によってスキャン駆動時に制御目標位置を確定する場合の例で説明したが、制御目標位置の情報の取得の仕方はこれに限定されるものではない。例えば、適宜の位置センサなどによって被駆動体の移動位置を検出することで取得してもよい。
また、制御目標位置は、スキャン駆動が終わるまで、すなわち、目標位置駆動が開始されるまでの間に確定していれば、どのように設定してもよい。例えば、被駆動体の位置を検出することなく、スキャン駆動時の抵抗指令値の中から、抵抗指令値を指定するだけでもよい。
また、制御目標位置は、スキャン駆動が終わるまで、すなわち、目標位置駆動が開始されるまでの間に確定していれば、どのように設定してもよい。例えば、被駆動体の位置を検出することなく、スキャン駆動時の抵抗指令値の中から、抵抗指令値を指定するだけでもよい。
1、1A、1B 形状記憶合金(SMA)アクチュエータ
2 支持体
3 撮像レンズユニット(被駆動体)
5 SMAワイヤ(形状記憶合金部材)
10 アクチュエータ本体
11、11A、11B 駆動制御部
12、12A、12B 抵抗指令値生成部
13 通電制御部
14 抵抗検出部
15 目標位置到達検知部
17 第1の抵抗指令値データ設定手段
18 第2の抵抗指令値データ設定手段
18B 第2の抵抗指令値データ設定手段(計時手段、抵抗指令値変更手段)
24 撮像制御部
25 目標位置設定部
30A 電気抵抗判定手段
100 カメラ(電子機器)
2 支持体
3 撮像レンズユニット(被駆動体)
5 SMAワイヤ(形状記憶合金部材)
10 アクチュエータ本体
11、11A、11B 駆動制御部
12、12A、12B 抵抗指令値生成部
13 通電制御部
14 抵抗検出部
15 目標位置到達検知部
17 第1の抵抗指令値データ設定手段
18 第2の抵抗指令値データ設定手段
18B 第2の抵抗指令値データ設定手段(計時手段、抵抗指令値変更手段)
24 撮像制御部
25 目標位置設定部
30A 電気抵抗判定手段
100 カメラ(電子機器)
Claims (6)
- 支持体に設置された形状記憶合金部材に対して、被駆動体を付勢状態に係止し、通電によるジュール熱によって前記形状記憶合金部材を収縮変形させることで、前記被駆動体を基準位置から制御目標位置を超える範囲まで一定方向に移動させる第1の移動動作を行い、少なくとも前記第1の移動動作が終わるまでの間に確定された制御目標位置の情報に基づいて、前記形状記憶合金部材への通電を低減もしくは停止することで、前記被駆動体を前記基準位置に戻してから、前記被駆動体を前記制御目標位置に移動させる第2の移動動作とを行う形状記憶合金アクチュエータであって、
前記形状記憶合金部材の電気抵抗を検出する抵抗検出部と、
前記第1の移動動作を行うために、前記形状記憶合金部材の電気抵抗の目標値である抵抗指令値が時間とともに低減されるような第1の抵抗指令値データと、前記第2の移動動作を行うために、前記形状記憶合金部材に対する通電を低減もしくは停止する冷却時間の間、前記第1の抵抗指令値データの最小値よりも大きな抵抗指令値としてから、前記被駆動体を前記制御目標位置に位置づけるための抵抗指令値である目標抵抗指令値に変更するような第2の抵抗指令値データとを生成する抵抗指令値生成部と、
前記抵抗検出部で検出された前記形状記憶合金部材の電気抵抗が前記抵抗指令値生成部で生成された前記各抵抗指令値に一致するように、前記形状記憶合金部材への通電量を変化させる通電制御部と、
前記確定された制御目標位置の情報を取得して、前記第1の移動動作における前記制御目標位置に対応する目標候補抵抗指令値を求める目標位置到達検知部とを備え、
前記抵抗指令値生成部は、
前記第2の抵抗指令値データを生成する際に、前記目標抵抗指令値を、前記目標位置到達検知部が求めた前記目標候補抵抗指令値に補正値を加算して生成するとともに、
前記目標候補抵抗指令値に応じて、前記補正値および前記冷却時間の少なくともいずれかを変化させるようにしたことを特徴とする形状記憶合金アクチュエータ。 - 前記抵抗指令値生成部は、
前記補正値を、前記目標候補抵抗指令値によらず一定値0に設定し、
前記冷却時間を、前記目標候補抵抗指令値がより小さい場合の冷却時間以上に設定して変化させることを特徴とする請求項1に記載の形状記憶合金アクチュエータ。 - 前記抵抗指令値生成部は、
前記冷却時間を、前記目標候補抵抗指令値によらず、前記第1の移動動作開始時の前記形状記憶合金部材の温度まで冷却されるよりも短い一定時間とし、
前記補正値を、前記目標候補抵抗指令値がより小さい場合の補正値以上に設定して変化させることを特徴とする請求項1に記載の形状記憶合金アクチュエータ。 - 前記抵抗指令値生成部は、
前記第2の移動動作で前記被駆動体を前記基準位置に移動させる間、前記抵抗検出部によって検出される電気抵抗の検出値を取得して、該電気抵抗の検出値が一定の閾値以上となったかどうか判定する電気抵抗値判定手段を備えるとともに、
前記電気抵抗値判定手段によって、前記電気抵抗の検出値が前記閾値以上になったと判定されたときに、前記第2の抵抗指令値データを、その先頭に戻って前記通電制御部に順次送出するようにしたことを特徴とする請求項1〜3のいずれかに記載の形状記憶合金アクチュエータ。 - 前記抵抗指令値生成部は、
前記第2の移動動作で前記被駆動体を前記基準位置に移動させる間、前記抵抗検出部によって検出される電気抵抗の検出値を取得して、該電気抵抗の検出値が一定の閾値以上となったかどうか判定する電気抵抗値判定手段と、
前記第2の移動動作で前記被駆動体を前記基準位置に向けて移動を開始してから、前記電気抵抗判定手段によって前記電気抵抗の検出値が前記閾値以上になったと判定されるまでの間の閾値通過時間を取得する計時手段と、
前記第2の抵抗指令値データを、前記計時手段で取得された閾値通過時間に応じて変更する抵抗指令値データ変更手段とを備え、
前記電気抵抗値判定手段によって、前記電気抵抗の検出値が前記閾値以上になったと判定されたときに、前記抵抗指令値データ変更手段によって変更された第2の抵抗指令値データを前記駆動制御部に順次送出するようにしたことを特徴とする請求項1〜3のいずれかに記載の形状記憶合金アクチュエータ。 - 請求項1〜5のいずれかに記載の形状記憶合金アクチュエータを備える電子機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270014A JP2009098416A (ja) | 2007-10-17 | 2007-10-17 | 形状記憶合金アクチュエータおよびそれを備える電子機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270014A JP2009098416A (ja) | 2007-10-17 | 2007-10-17 | 形状記憶合金アクチュエータおよびそれを備える電子機器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009098416A true JP2009098416A (ja) | 2009-05-07 |
Family
ID=40701479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007270014A Pending JP2009098416A (ja) | 2007-10-17 | 2007-10-17 | 形状記憶合金アクチュエータおよびそれを備える電子機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009098416A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2011016411A1 (ja) * | 2009-08-06 | 2013-01-10 | コニカミノルタホールディングス株式会社 | 駆動装置及びレンズ駆動装置 |
| KR20130108283A (ko) * | 2010-08-09 | 2013-10-02 | 캠브리지 메카트로닉스 리미티드 | 카메라 장치 |
| CN115500034A (zh) * | 2022-10-19 | 2022-12-20 | Oppo广东移动通信有限公司 | 电子设备的控制方法及电子设备 |
| CN115779184A (zh) * | 2021-09-10 | 2023-03-14 | 上海移宇科技股份有限公司 | 互锁式药物输注装置 |
| JP2024106998A (ja) * | 2019-03-06 | 2024-08-08 | ソニーグループ株式会社 | 香り提供装置 |
| CN120935458A (zh) * | 2025-10-13 | 2025-11-11 | 芯知科技(江苏)有限公司 | 基于可形变金属的摄像头多透镜组对焦系统及方法 |
-
2007
- 2007-10-17 JP JP2007270014A patent/JP2009098416A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2011016411A1 (ja) * | 2009-08-06 | 2013-01-10 | コニカミノルタホールディングス株式会社 | 駆動装置及びレンズ駆動装置 |
| KR20130108283A (ko) * | 2010-08-09 | 2013-10-02 | 캠브리지 메카트로닉스 리미티드 | 카메라 장치 |
| KR101893229B1 (ko) | 2010-08-09 | 2018-08-29 | 캠브리지 메카트로닉스 리미티드 | 카메라 장치 |
| JP2024106998A (ja) * | 2019-03-06 | 2024-08-08 | ソニーグループ株式会社 | 香り提供装置 |
| JP7848827B2 (ja) | 2019-03-06 | 2026-04-21 | ソニーグループ株式会社 | 香り提供装置 |
| CN115779184A (zh) * | 2021-09-10 | 2023-03-14 | 上海移宇科技股份有限公司 | 互锁式药物输注装置 |
| CN115500034A (zh) * | 2022-10-19 | 2022-12-20 | Oppo广东移动通信有限公司 | 电子设备的控制方法及电子设备 |
| CN120935458A (zh) * | 2025-10-13 | 2025-11-11 | 芯知科技(江苏)有限公司 | 基于可形变金属的摄像头多透镜组对焦系统及方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2111507B1 (en) | Shape memory alloy actuation apparatus | |
| CN101668947B (zh) | 形状记忆合金驱动设备 | |
| JP4539784B2 (ja) | 形状記憶合金駆動装置 | |
| JP5379118B2 (ja) | 撮像装置、撮像装置制御方法およびそのプログラム | |
| EP2342459B1 (en) | Control of a shape memory alloy actuation arrangement | |
| CN102265032B (zh) | 形状记忆合金致动器的驱动装置及其驱动方法以及使用该驱动装置的成像装置 | |
| US8228623B2 (en) | Imaging device | |
| US8395855B2 (en) | Shape memory alloy actuation apparatus | |
| KR101295433B1 (ko) | 카메라의 자동초점조절 장치 및 방법 | |
| JP4360896B2 (ja) | オートフォーカス装置 | |
| WO2012042722A1 (ja) | 駆動装置 | |
| JP2009098416A (ja) | 形状記憶合金アクチュエータおよびそれを備える電子機器 | |
| JP4918021B2 (ja) | 形状記憶合金アクチュエータおよびそれを備える電子機器 | |
| JP2009145645A (ja) | 光学機器 | |
| KR101317085B1 (ko) | 렌즈 구동 장치, 촬상 장치 및 전자 기기 | |
| JP2010210872A (ja) | レンズ駆動装置及び撮像装置 | |
| JPWO2011108209A1 (ja) | 位置制御装置、位置制御方法、駆動装置および撮像装置 | |
| CN102472880A (zh) | 光学系统驱动装置、具备光学系统驱动装置的摄像装置、及搭载有摄像装置的便携设备 | |
| KR20120004093A (ko) | 카메라 모듈 및 카메라 모듈의 내부온도 제어방법 | |
| JP2010169841A (ja) | 撮像装置 | |
| JP2009128423A (ja) | 駆動制御装置 | |
| JP2007140292A (ja) | 駆動制御装置及び駆動制御方法 | |
| JP2010211002A (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091105 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091113 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091117 |