JP2009128016A - レーダ装置、レーダ制御装置およびレーダ装置の制御方法 - Google Patents
レーダ装置、レーダ制御装置およびレーダ装置の制御方法 Download PDFInfo
- Publication number
- JP2009128016A JP2009128016A JP2007299753A JP2007299753A JP2009128016A JP 2009128016 A JP2009128016 A JP 2009128016A JP 2007299753 A JP2007299753 A JP 2007299753A JP 2007299753 A JP2007299753 A JP 2007299753A JP 2009128016 A JP2009128016 A JP 2009128016A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- calculation
- radar
- antennas
- angles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 25
- 238000001514 detection method Methods 0.000 claims abstract description 203
- 238000004904 shortening Methods 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 20
- 230000001133 acceleration Effects 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 9
- 230000003595 spectral effect Effects 0.000 description 5
- 238000007689 inspection Methods 0.000 description 4
- 238000001228 spectrum Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000035559 beat frequency Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
Images

















Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
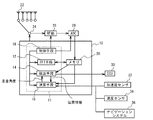
【解決手段】本発明は、レーダ波を受信する複数のアンテナ22と、複数のアンテナ22毎に得られたビート信号を用い、複数の検出角度における対象物を検出する検出手段14と、検出手段14が検出した対象物から演算用対象物を選択し、演算用対象物の位置情報に基づき、検出手段14が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更する演算手段16と、を具備するレーダ装置、レーダ制御装置およびレーダ装置の制御方法である。
【選択図】図1
Description
12 FFT手段
14 検出手段
16 演算手段
18 制御手段
20 メモリ
22 アンテナ
24 スイッチ
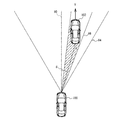
80 前面方向
90 レーダ装置
100 車両
102 対象物
Claims (8)
- レーダ波を受信する複数のアンテナと、
前記複数のアンテナ毎に得られたビート信号を用い、複数の検出角度における対象物を検出する検出手段と、
前記検出手段が検出した対象物から演算用対象物を選択し、前記演算用対象物の位置情報に基づき、前記検出手段が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更する演算手段と、を具備することを特徴とするレーダ装置。 - 前記位置情報は前記演算対象物の方位であり、
前記演算手段は、前記演算用対象物の方位に対応する検出角度の間隔を、前記演算用対象物が存在しない方位に対応する検出角度の間隔に対し密にすることを特徴とする請求項1記載のレーダ装置。 - 前記演算手段は、対象物と前記複数のアンテナとの距離が所定距離以上であり、かつ前記対象物が前記複数のアンテナから遠ざかっていると判断した場合、前記対象物を前記演算用対象物から除外することを特徴とする請求項1または2記載のレーダ装置。
- 前記検出手段が複数の前記対象物を検出した場合、
前記演算手段は、前記複数の対象物それぞれと前記複数のアンテナとの距離及び前記複数の対象物それぞれと前記複数のアンテナとの相対速度に基づき、前記演算用対象物を選択することを特徴とする請求項1から3のいずれか一項記載のレーダ装置。 - 前記演算手段は、前記複数の対象物のうち前記検出手段が次に対象物を検出する際に前記複数のアンテナに最も接近すると判断した対象物、を前記演算用対象物として選択することを特徴とする請求項4記載のレーダ装置。
- 前記演算手段は、別のレーダ装置から取得した対象物の位置情報に基づき、前記検出手段が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更することを特徴とする請求項1から5のいずれか一項記載のレーダ装置。
- レーダ波を受信する複数のアンテナ毎に得られたビート信号を用い、複数の検出角度における対象物を検出する検出手段と、
前記検出手段が検出した対象物から演算用対象物を選択し、前記演算用対象物の位置情報に基づき、前記検出手段が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更する演算手段と、を具備することを特徴とするレーダ制御装置。 - レーダ波を受信する複数のアンテナ毎に得られたビート信号を用い、複数の検出角度における対象物を検出するステップと、
前記検出手段が検出した対象物から演算用対象物を選択するステップと、
前記演算用対象物の位置情報に基づき、前記検出手段が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更するステップと、を有することを特徴とするレーダ装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007299753A JP2009128016A (ja) | 2007-11-19 | 2007-11-19 | レーダ装置、レーダ制御装置およびレーダ装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007299753A JP2009128016A (ja) | 2007-11-19 | 2007-11-19 | レーダ装置、レーダ制御装置およびレーダ装置の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009128016A true JP2009128016A (ja) | 2009-06-11 |
Family
ID=40819122
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007299753A Pending JP2009128016A (ja) | 2007-11-19 | 2007-11-19 | レーダ装置、レーダ制御装置およびレーダ装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009128016A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011121338A1 (en) * | 2010-04-01 | 2011-10-06 | Bae Systems Plc | Projectile detection system |
| EP2407798A1 (en) * | 2010-04-01 | 2012-01-18 | BAE Systems PLC | Projectile detection system |
| JP2013238452A (ja) * | 2012-05-14 | 2013-11-28 | Honda Elesys Co Ltd | 位置情報検出装置、位置情報検出方法、位置情報検出プログラム、及び動作制御システム |
| JP2015155883A (ja) * | 2014-01-15 | 2015-08-27 | パナソニック株式会社 | レーダ装置 |
| US11644556B2 (en) | 2017-06-20 | 2023-05-09 | Nec Corporation | Position measurement device, position measurement method, and program recording medium |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02151787A (ja) * | 1988-12-02 | 1990-06-11 | Mazda Motor Corp | 移動車の環境認識装置 |
| JPH11127001A (ja) * | 1997-10-23 | 1999-05-11 | Murata Mfg Co Ltd | 誘電体線路スイッチおよびアンテナ装置 |
| JP2001235540A (ja) * | 2000-02-23 | 2001-08-31 | Toyota Motor Corp | Dbfレーダ装置 |
| JP2002257925A (ja) * | 2001-02-28 | 2002-09-11 | Toyota Motor Corp | レーダ装置 |
| JP2003139849A (ja) * | 2001-10-30 | 2003-05-14 | Mitsubishi Electric Corp | レーダ装置 |
| JP2006046962A (ja) * | 2004-07-30 | 2006-02-16 | Toyota Motor Corp | 物標検出装置 |
| JP2008026035A (ja) * | 2006-07-18 | 2008-02-07 | Murata Mfg Co Ltd | レーダ |
-
2007
- 2007-11-19 JP JP2007299753A patent/JP2009128016A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02151787A (ja) * | 1988-12-02 | 1990-06-11 | Mazda Motor Corp | 移動車の環境認識装置 |
| JPH11127001A (ja) * | 1997-10-23 | 1999-05-11 | Murata Mfg Co Ltd | 誘電体線路スイッチおよびアンテナ装置 |
| JP2001235540A (ja) * | 2000-02-23 | 2001-08-31 | Toyota Motor Corp | Dbfレーダ装置 |
| JP2002257925A (ja) * | 2001-02-28 | 2002-09-11 | Toyota Motor Corp | レーダ装置 |
| JP2003139849A (ja) * | 2001-10-30 | 2003-05-14 | Mitsubishi Electric Corp | レーダ装置 |
| JP2006046962A (ja) * | 2004-07-30 | 2006-02-16 | Toyota Motor Corp | 物標検出装置 |
| JP2008026035A (ja) * | 2006-07-18 | 2008-02-07 | Murata Mfg Co Ltd | レーダ |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011121338A1 (en) * | 2010-04-01 | 2011-10-06 | Bae Systems Plc | Projectile detection system |
| EP2407798A1 (en) * | 2010-04-01 | 2012-01-18 | BAE Systems PLC | Projectile detection system |
| US8981989B2 (en) | 2010-04-01 | 2015-03-17 | Bae Systems Plc | Projectile detection system |
| JP2013238452A (ja) * | 2012-05-14 | 2013-11-28 | Honda Elesys Co Ltd | 位置情報検出装置、位置情報検出方法、位置情報検出プログラム、及び動作制御システム |
| JP2015155883A (ja) * | 2014-01-15 | 2015-08-27 | パナソニック株式会社 | レーダ装置 |
| US11644556B2 (en) | 2017-06-20 | 2023-05-09 | Nec Corporation | Position measurement device, position measurement method, and program recording medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5078637B2 (ja) | レーダ装置、及び物標検出方法 | |
| JP6313981B2 (ja) | レーダ装置、車両制御システム、および、信号処理方法 | |
| JP4867200B2 (ja) | レーダ装置 | |
| JP5874824B2 (ja) | レーダ装置、角度検証方法 | |
| JP5990761B2 (ja) | レーダ装置 | |
| JP6716984B2 (ja) | 物標検出装置 | |
| CN106574969B (zh) | 车载雷达装置、报告系统以及车载雷达装置的行驶车辆检测方法 | |
| JP2015141109A (ja) | レーダ装置、及び、信号処理方法 | |
| JP2000065921A (ja) | Fm−cwレーダ装置 | |
| JP2016109675A (ja) | 物体検出装置、速度検出装置及び車両 | |
| JP4098311B2 (ja) | 電子走査型ミリ波レーダ装置およびコンピュータプログラム | |
| JP2011117896A (ja) | 電子走査型レーダ装置及びコンピュータプログラム | |
| JP2009092410A (ja) | レーダ装置、及び物標検出方法 | |
| JP5184196B2 (ja) | レーダ装置、レーダ装置の信号処理方法及び、車両制御システム | |
| US9372260B2 (en) | Object detecting device, object detecting method, object detecting program, and motion control system | |
| JP6439728B2 (ja) | 搭載角度学習装置 | |
| JP2009229374A (ja) | レーダ装置、及び方位角検出方法 | |
| JP4780240B2 (ja) | レーダ装置 | |
| WO2020230755A1 (ja) | 軸ずれ推定装置 | |
| WO2016104472A1 (ja) | 推定方位を用いた方位誤差検出方法および装置、車載レーダ装置 | |
| JP2010038841A (ja) | レーダ装置及び物標検出方法 | |
| JP2015028440A (ja) | レーダ装置、及び、信号処理方法 | |
| JP2014006122A (ja) | 物体検出装置 | |
| JP2009128016A (ja) | レーダ装置、レーダ制御装置およびレーダ装置の制御方法 | |
| JP2013238414A (ja) | 車載用のレーダ装置、方位検知方法、方位検知プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101021 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110719 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120530 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120605 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121106 |