JP2009159268A - 光学装置 - Google Patents
光学装置 Download PDFInfo
- Publication number
- JP2009159268A JP2009159268A JP2007334687A JP2007334687A JP2009159268A JP 2009159268 A JP2009159268 A JP 2009159268A JP 2007334687 A JP2007334687 A JP 2007334687A JP 2007334687 A JP2007334687 A JP 2007334687A JP 2009159268 A JP2009159268 A JP 2009159268A
- Authority
- JP
- Japan
- Prior art keywords
- infrared cut
- cut filter
- center
- optical
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Blocking Light For Cameras (AREA)
- Camera Bodies And Camera Details Or Accessories (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Studio Devices (AREA)
Abstract
【課題】短時間かつ小電力で光学部材の表面に付着した塵埃等の異物を除去できるようにする。
【解決手段】光学像が結像する被投影部材としての撮像素子と、撮像素子の前方に配設された赤外線カットフィルタと、赤外線カットフィルタに振動を与える圧電素子と、撮像素子の視野を囲むように配置されて赤外線カットフィルタと当接する弾性部材を備え、弾性部材の中心が撮像視野の中心に対して上側に配置されており、撮像視野の中心に対して上側の振幅が下側の振幅よりも大きくなっている。これにより、一旦は赤外線カットフィルタを離れた異物が、撮像視野内で再付着する可能性を軽減し、より安定した除去性能を提供することが可能になる。
【選択図】図13
【解決手段】光学像が結像する被投影部材としての撮像素子と、撮像素子の前方に配設された赤外線カットフィルタと、赤外線カットフィルタに振動を与える圧電素子と、撮像素子の視野を囲むように配置されて赤外線カットフィルタと当接する弾性部材を備え、弾性部材の中心が撮像視野の中心に対して上側に配置されており、撮像視野の中心に対して上側の振幅が下側の振幅よりも大きくなっている。これにより、一旦は赤外線カットフィルタを離れた異物が、撮像視野内で再付着する可能性を軽減し、より安定した除去性能を提供することが可能になる。
【選択図】図13
Description
本発明は、撮像装置等の光学装置に関し、特に光軸上に配設された光学部材の表面に付着した塵埃等の異物の除去技術に関するものである。
画像信号を電気信号に変換して撮像するデジタルカメラ等の撮像装置では、撮影光束をCCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)等の撮像素子で受光する。そして、撮像素子から出力される光電変換信号を画像データに変換して、メモリカード等の記録媒体に記録する。このような撮像装置では、撮像素子の前方(被写体側)に、光学ローパスフィルタや赤外線カットフィルタが配設される。
この種の撮像装置において、撮像素子のカバーガラスやこれらのフィルタの表面に塵埃等の異物が付着すると、その異物が黒い点となって撮影画像に写り込み、画像の見栄えが低下してしまう。
特にレンズ交換可能なデジタル一眼レフカメラでは、シャッタやクイックリターンミラーといった機械的な作動部が撮像素子の近傍に配置されており、それらの作動部から発生した塵埃等の異物が、撮像素子のカバーガラスやフィルタの表面に付着することがある。また、レンズ交換時に、レンズマウントの開口から塵埃等の異物がカメラ本体内に入り込み、これが付着することもある。
そこで、特許文献1には、撮像素子の被写体側に撮影光束を透過させる防塵幕を設け、これを圧電素子で振動させることにより、防塵幕の表面に付着した塵埃等の異物を除去するものが提案されている。
上記特許文献1では、円形の防塵幕は防塵幕の中心と撮像視野中心とが略一致するように配設され、光軸に垂直な面内では光軸に対して対称な膜振動を発生させることで、防塵幕に付着した塵埃等の異物を除去している。
しかしながら、この技術では、膜振動の特性や防塵幕の保持構造上、防塵幕の中心付近での振幅は大きく、防塵幕の端部での振幅は小さくなる傾向にある。そのため、撮像視野に対して鉛直上側の振幅が小さな領域に付着した異物は、防塵幕から与えられる加速度が小さいため防塵幕から遠くへは飛ばず、防塵幕近傍で重力によって落下する。そして、その落下中に、一旦は防塵幕から除去された異物が、防塵幕の撮像視野内で再付着することがあり、安定した防塵性能を得ることができない。
再付着した異物を再び落とすために、異物除去のための振動時間を長くするという解決手段が考えられるが、そうすると本来の使用用途である撮像とは関係のない異物除去動作に多大な時間を費やすこととなり、撮像装置の快適な使用感を損なうこととなる。しかも、異物除去のための振動時間を長くすると、電力をより多く消費することとなり、撮影可能枚数が減少する等、これも撮像装置の快適な使用感を損なうこととなる。
また、最小振幅となる箇所でも異物が遠くへと飛散するように、圧電素子に大きな電圧を印加し、防塵幕全体の振幅を底上げするという解決手段も考えられるが、これも消費電力の拡大を招くことになる。しかも、撮像装置の構成上、防塵幕は薄く割れやすい光学ガラスを用いることが多く、大きな振幅を与えることで防塵幕が破損するおそれが増大してしまうという問題がある。
本発明は、上記のような課題に鑑みてなされたものであり、短時間かつ小電力で光学部材の表面に付着した塵埃等の異物を除去できるようにすることを目的とする。
本発明の光学装置は、光学像が結像する被投影部材と、前記被投影部材の前方に配設された光学部材と、前記光学部材に振動を与える加振部材とを備え、前記光学部材の振動は、前記被投影部材の視野中心に対して上側の振幅が下側の振幅よりも大きいことを特徴とする。
本発明によれば、短時間かつ小電力で光学部材の表面に付着した塵埃等の異物を除去することが可能となる。
以下、添付図面を参照して、本発明の好適な実施形態について説明する。
(第1の実施形態)
図1及び図2は、本実施形態に係るデジタル一眼レフカメラの外観図である。図1は、カメラを被写体側より見た正面側斜視図であって、撮影レンズユニットを外した状態を示す。図2は、カメラを撮影者側より見た背面側斜視図である。
(第1の実施形態)
図1及び図2は、本実施形態に係るデジタル一眼レフカメラの外観図である。図1は、カメラを被写体側より見た正面側斜視図であって、撮影レンズユニットを外した状態を示す。図2は、カメラを撮影者側より見た背面側斜視図である。
図1に示すように、カメラ本体1には、撮影時に撮影者が安定して握り易いように被写体側に突出したグリップ部1aが設けられている。
カメラ本体1のマウント部2には、撮影レンズユニット(図1、2では不図示)が着脱可能に固定される。マウント接点21は、カメラ本体1と撮影レンズユニットとの間で制御信号、状態信号、データ信号等の通信を可能にするとともに、撮影レンズユニット側に電力を供給する。マウント接点21は、電気通信のみならず、光通信、音声通信等が可能なように構成してもよい。マウント部2の横には、撮影レンズユニットを取り外す際に押し込むレンズロック解除ボタン4が配置されている。
カメラ本体1内には、撮影レンズを通過した撮影光束が導かれるミラーボックス5が設けられており、ミラーボックス5内にメインミラー(クイックリターンミラー)6が配設されている。メインミラー6は、撮影光束をペンタダハミラー22(図3を参照)の方向へ導くために撮影光軸に対して45°の角度に保持される状態と、撮像素子33(図3を参照)の方向へ導くために撮影光束から退避した位置に保持される状態とを取り得る。
カメラ上部のグリップ1a側には、撮影開始の起動スイッチとしてのレリーズボタン7と、撮影時の動作モードに応じてシャッタスピードやレンズ絞り値を設定するためのメイン操作ダイヤル8と、撮影系の上面動作モード設定ボタン10とが配置されている。これら操作部材の操作結果の一部は、LCD表示パネル9に表示される。レリーズボタン7は、第1ストロークでSW1(図3の7a)がONし、第2ストロークでSW2(図3の7b)がONする構成となっている。また、上面動作モード設定ボタン10は、レリーズボタン7の1回の押込みで連写になるか1コマのみの撮影となるかの設定や、セルフ撮影モードの設定等を行うためのものであり、LCD表示パネル9にその設定状況が表示される。
カメラ上部の中央には、カメラ本体1に対してポップアップするストロボユニット11と、フラッシュ取り付け用のシュー溝12及びフラッシュ接点13とが設けられている。
カメラ上部の右よりには、撮影モード設定ダイヤル14が配置されている。
カメラのグリップ1aに対して反対側の側面には、開閉可能な外部端子蓋15が設けられている。外部端子蓋15を開けた内部には、外部インタフェースとしてビデオ信号出力用ジャック16及びUSB出力用コネクタ17が納められている。
図2に示すように、カメラ背面の上方には、ファインダ接眼窓18が設けられている。また、カメラ背面の中央付近には、画像表示可能なカラー液晶モニタ19が設けられている。
カラー液晶モニタ19の横には、サブ操作ダイヤル20が配置されている。サブ操作ダイヤル20は、メイン操作ダイヤル8の機能の補助的役割を担うものである。例えばカメラのAEモードでは、自動露出装置によって算出された適正露出値に対する露出補正量を設定するために使用される。シャッタスピード及びレンズ絞り値の各々を使用者の意志によって設定するマニュアルモードでは、メイン操作ダイヤル8でシャッタスピードを設定し、サブ操作ダイヤル20でレンズ絞り値を設定するように使用される。また、このサブ操作ダイヤル20は、カラー液晶モニタ19に表示される撮影済み画像の表示を選択するためにも使用される。
さらに、カメラ背面には、カメラの動作を起動もしくは停止するためのメインスイッチ43と、クリーニングモードを動作させるためのクリーニング指示操作部材44とが配置されている。クリーニング指示操作部材44は、詳しくは後述するが、光学部材の表面に付着した塵埃等の異物をふるい落とす動作を指示するためのものである。
図3は、本実施形態に係るデジタル一眼レフカメラの主要な電気的構成を示すブロック図である。なお、図1及び図2と共通する部分には同一の符号を付す。カメラ本体1に内蔵されたマイクロコンピュータからなる中央処理装置(以下、「MPU」と称する)100は、カメラの動作制御を司るものであり、各要素に対して様々な処理や指示を実行する。MPU100に内蔵されたEEPROM100aは、時刻計測回路109の計時情報やその他の情報を記憶することができる。
MPU100には、ミラー駆動回路101、焦点検出回路102、シャッタ駆動回路103、映像信号処理回路104、スイッチセンス回路105、測光回路106が接続されている。また、LCD駆動回路107、バッテリチェック回路108、時刻計測回路109、電源供給回路110、圧電素子駆動回路111が接続されている。これらの回路は、MPU100の制御によって動作するものである。
MPU100は、撮影レンズユニット内のレンズ制御回路201とマウント接点21を介して通信を行う。マウント接点21は、撮影レンズユニットが接続されるとMPU100へ信号を送信する機能も有する。これにより、レンズ制御回路201は、MPU100との間で通信を行い、AF駆動回路202及び絞り駆動回路203を介して撮影レンズユニット内の撮影レンズ200及び絞り204の駆動を行う。なお、図3では便宜上1枚の撮影レンズのみを図示しているが、実際は多数のレンズ群によって構成される。
AF駆動回路202は、例えばステッピングモータによって構成され、レンズ制御回路201の制御によって撮影レンズ200内のフォーカスレンズ位置を変化させ、撮像素子33に撮影光束の焦点を合わせるように調整する。絞り駆動回路203は、例えばオートアイリス等によって構成され、レンズ制御回路201の制御によって絞り204を変化させ、光学的な絞り値を得る。
メインミラー6は、図3に示す撮影光軸に対して45°の角度に保持された状態で、撮影レンズ200を通過する撮影光束をペンタダハミラー22へ導くとともに、その一部を透過させてサブミラー30へ導く。サブミラー30は、メインミラー6を透過した撮影光束を焦点検出用センサユニット31へ導く。
ミラー駆動回路101は、例えばDCモータとギヤトレイン等によって構成され、メインミラー6を、ファインダにより被写体像を観察可能とする位置と、撮影光束から待避する位置とに駆動する。メインミラー6が駆動すると、同時にサブミラー30も、焦点検出用センサユニット31へ撮影光束を導く位置と、撮影光束から待避する位置とに移動する。
焦点検出用センサユニット31は、不図示の結像面近傍に配置されたフィールドレンズ、反射ミラー、2次結像レンズ、絞り、複数のCCDからなるラインセンサ等によって構成され、位相差方式の焦点検出を行う。焦点検出用センサユニット31から出力される信号は、焦点検出回路102へ供給され、被写体像信号に換算された後、MPU100に送信される。MPU100は、被写体像信号に基づいて位相差検出法による焦点検出演算を行う。そして、デフォーカス量及びデフォーカス方向を求め、これに基づいて、レンズ制御回路201及びAF駆動回路202を介して撮影レンズ200内のフォーカスレンズを合焦位置まで駆動する。
ペンタダハミラー22は、メインミラー6によって反射された撮影光束を正立正像に変換反射する。撮影者はファインダ光学系を介してファインダ接眼窓18から被写体像を観察することができる。ペンタダハミラー22は、撮影光束の一部を測光センサ23へも導く。測光回路106は、測光センサ23の出力を得て、観察面上の各エリアの輝度信号に変換し、MPU100に出力する。MPU100は、輝度信号に基づいて露出値を算出する。
シャッタユニット(機械フォーカルプレーンシャッタ)32は、撮像待機時、つまり撮影者がファインダにより被写体像を観察している時には、撮影光束を遮る状態にある。そして、撮像時には、レリーズ信号に応じて、不図示の先羽根群と後羽根群の走行する時間差により所望の露光時間を得るように構成されている。シャッタユニット32は、MPU100の指示を受けたシャッタ駆動回路103によって制御される。
撮像ユニット400は、赤外線カットフィルタ410、光学ローパスフィルタ420、圧電素子430、撮像素子33が後述する他の部品と共にユニット化されたものである。その詳細な構成については後述する。
赤外線カットフィルタ410は、略矩形状を有し、撮像素子33に入射する光束の不要な赤外線をカットする。赤外線カットフィルタ410の表面は、異物の付着を防止するために導電性物質で覆われている。本実施形態では、この赤外線カットフィルタ410が、被投影部材の前方に配設された光学部材に相当する。
光学ローパスフィルタ420は、略矩形状を有し、水晶等からなる複屈折板及び位相板を複数枚貼り合わせて積層されている。光学ローパスフィルタ420は、撮像素子33に入射する光束を複数に分離し、偽解像信号や偽色信号の発生を効果的に低減させる。
圧電素子430は、MPU100の指示を受けた圧電素子駆動回路111によって駆動され、赤外線カットフィルタ410と一体的に振動するように構成されている。本実施形態では、この圧電素子430が、光学部材に振動を与える加振部材に相当する。
撮像素子33は、被写体の光学像を電気信号に変換する。本実施形態ではCMOS型撮像デバイスが用いられるが、その他にもCCD型、CMOS型及びCID型等様々な形態があり、いずれの形態の撮像デバイスを採用してもよい。撮像素子33の視野33a(以下、「撮像視野33a」と称する)(図13を参照)の領域で受光した光が撮像される。撮像視野33aの中心は撮影レンズ200のレンズ光軸と一致させることが一般的であるが、撮像素子33の一部の画素のみを使用して撮像するクロップ撮影等では一致しないこともある。本実施形態では、この撮像素子33が、光学像が結像する被投影部材に相当する。
クランプ/CDS(相関二重サンプリング)回路34は、A/D変換する前の基本的なアナログ処理を行うものであり、クランプレベルを変更することも可能である。AGC(自動利得調整装置)35は、A/D変換する前の基本的なアナログ処理を行うものであり、AGC基本レベルを変更することも可能である。A/D変換器36は、撮像素子33のアナログ出力信号をデジタル信号に変換する。
映像信号処理回路104は、デジタル化された画像データに対してガンマ/ニー処理、フィルタ処理、モニタ表示用の情報合成処理等、ハードウエアによる画像処理全般を実行する。この映像信号処理回路104からのモニタ表示用の画像データは、カラー液晶駆動回路112を介してカラー液晶モニタ19に表示される。また、映像信号処理回路104は、MPU100の指示に従って、メモリコントローラ38を通じてバッファメモリ37に画像データを保存することもできる。さらに、映像信号処理回路104は、JPEG等の画像データ圧縮処理を行うこともできる。連写撮影等、連続して撮影が行われる場合は、一旦バッファメモリ37に画像データを格納し、メモリコントローラ38を通して未処理の画像データを順次読み出すこともできる。これにより、映像信号処理回路104は、A/D変換器36から入力されてくる画像データの速度に関わらず、画像処理や圧縮処理を順次行うことができる。
メモリコントローラ38は、外部インタフェース40から入力される画像データをメモリ39に記憶し、メモリ39に記憶されている画像データを外部インタフェース40から出力する機能を有する。なお、外部インタフェース40は、図1におけるビデオ信号出力用ジャック16及びUSB出力用コネクタ17が相当するものである。メモリ39としては、カメラ本体に着脱可能なフラッシュメモリ等が用いられる。
スイッチセンス回路105は、各スイッチの操作状態に応じて入力信号をMPU100に送信する。スイッチSW1(7a)は、レリーズボタン7の第1ストローク(半押し)によりONする。スイッチSW2(7b)は、レリーズボタン7の第2ストローク(全押し)によりONする。スイッチSW2(7b)がONされると、撮影開始の指示がMPU100に送信される。また、メイン操作ダイヤル8、サブ操作ダイヤル20、撮影モード設定ダイヤル14、メインスイッチ43、クリーニング指示操作部材44が接続されている。
LCD駆動回路107は、MPU100の指示に従って、LCD表示パネル9やファインダ内液晶表示装置41を駆動する。
バッテリチェック回路108は、MPU100の指示に従って、バッテリチェックを行い、その検出結果をMPU100に送信する。電源42は、カメラの各要素に対して電源を供給する。
時刻計測回路109は、メインスイッチ43がOFFされて次にONされるまでの時間や日付を計測し、MPU100からの指示に従って、計測結果をMPU100に送信する。
以下、撮像ユニット400について説明する。図4は、撮像ユニット400の周辺構造について説明するためのカメラ内部の概略構成を示す分解斜視図である。カメラ本体の骨格となる本体シャーシ300の被写体側には、被写体側から順にミラーボックス5、シャッタユニット32が配設される。また、本体シャーシ300の撮影者側には、撮像ユニット400が配設される。撮像ユニット400は、撮影レンズユニットが取り付けられる基準となるマウント部2の取付面に撮像素子33の撮像面が所定の距離を空けて、且つ平行になるように調整されて固定される。
図5は、撮像ユニット400の構成を示す分解斜視図である。撮像ユニット400は、大きく分けて、振動ユニット470と、弾性部材450と、撮像素子ユニット500とにより構成される。詳細は後述するが、振動ユニット470は弾性部材450を挟み込むかたちで撮像素子ユニット500に固定され、弾性部材450が振動ユニット470の赤外線カットフィルタ410と撮像素子ユニット500とに挟持される。
まず、図5及び図6を参照して、撮像素子ユニット500について説明する。撮像素子ユニット500は、被写体の光学像を電気信号に変換する撮像素子33を含むものである。具体的に、撮像素子ユニット500において、510は固定部材であり、撮像素子33を保持するとともに、振動ユニット470の付勢部材460が固定される。520は撮像系の電気回路が実装された回路基板であり、固定部材510の撮影者側に配設される。530は導電性を有する金属等によって形成されたシールドケースである。540は撮像素子33の光電変換面の有効領域に対応した開口が形成された遮光部材であり、固定部材510の被写体側に配設される。550は光学ローパスフィルタ420を保持する光学ローパスフィルタ保持部材である。
固定部材510は、振動ユニット470の付勢部材460と位置決めするための位置決めピン部510aを有する。また、回路基板520及びシールドケース530をビスで固定するためのビス穴510bを有する。また、振動ユニット470の付勢部材460(固定部460b)をビスで固定するためのビス穴510cを有する。
図6は、図4のA−A線に沿う断面図である。遮光部材540の被写体側の面は光学ローパスフィルタ420と当接し、撮影者側の面は撮像素子33のカバーガラス33bと当接する。遮光部材540の被写体側及び撮影者側には両面テープが固着されており、光学ローパスフィルタ420は遮光部材540の両面テープにより撮像素子33のカバーガラス33bに固定、保持される。これにより、光学ローパスフィルタ420と撮像素子33のカバーガラス33bとの間は遮光部材540によって封止され、塵埃等の異物の侵入を防ぐ密閉空間が形成される。なお、圧電素子430は、図示するように、赤外線カットフィルタ410の撮像素子33側に固着される。
回路基板520には、ビス用の逃げ穴520aが設けられる。シールドケース530には、ビス用の逃げ穴530aが設けられる。回路基板520とシールドケース530は、ビス用の逃げ穴520aとビス用の逃げ穴530a、ビス穴510bを用いて、固定部材510にビスで係止される。シールドケース530は、電気回路を静電気等から保護するため回路上の接地電位に接続される。
光学ローパスフィルタ保持部材550は、遮光部材540の両面テープにより撮像素子33のカバーガラス33bに固着される。光学ローパスフィルタ420は光学ローパスフィルタ保持部材550の開口箇所にて位置決めされ、遮光部材540に両面テープで固定、保持される。
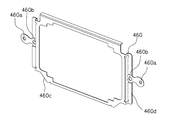
図7及び図8は、振動ユニット470の斜視図である。図7及び図8に示すように、付勢部材460は、撮像素子ユニット500の固定部材510と位置決めするための左右の位置決め部460aを有する。また、固定部材510に固定(ビス止め)するための左右の固定部460bを有する。また、赤外線カットフィルタ410を固定、保持するための枠状の保持部460cを有する。また、赤外線カットフィルタ410を撮像素子ユニット500側へ付勢する付勢力を付与する左右の腕部460dを有する。赤外線カットフィルタ410は、枠状の保持部460cに接着等によって固着される。
振動ユニット470は、付勢部材460の位置決め部460aと固定部材510の位置決めピン部510aとを用いて、撮像素子ユニット500に対して位置決めされる。その状態で、振動ユニット470は、付勢部材460の固定部460bと固定部材510のビス穴510cを用いて、弾性部材450を挟み込むかたちで撮像素子ユニット500にビスで固定される。
弾性部材450の被写体側の面は赤外線カットフィルタ410と当接し、撮影者側の面は光学ローパスフィルタ420と当接する。赤外線カットフィルタ410は、付勢部材460の腕部460dによって発生する付勢力によって撮像素子ユニット500側へと付勢されるので、弾性部材450と隙間無く密着し、また、弾性部材450と光学ローパスフィルタ420も同様に隙間無く密着する。これにより、赤外線カットフィルタ410と光学ローパスフィルタ420との間は弾性部材450によって封止され、塵埃等の異物の侵入を防ぐ密閉空間が形成される。
ここで、図9に、弾性部材450と撮像視野33aとの相対位置関係を示す。撮像視野33aは斜線で示す。撮像視野33aは撮像素子33の有効画素領域であり、この範囲に投影された被写体像が撮影画像として出力される。弾性部材450は撮像視野33aを囲むように配置されて赤外線カットフィルタ410と当接し、図9に示すように、弾性部材450の中心が撮像視野33aの中心に対して上側に配置されている。なお、本明細書でいう上下は、デジタル一眼レフカメラを通常使用する状態(図1及び図2に示す横置きの状態)での鉛直方向の上下を意味し、図9の矢印方向である。
図8に示すように、圧電素子430a、430bは、赤外線カットフィルタ410の端部に接着剤等によって固着される。本実施形態においては、赤外線カットフィルタ410の左右端に合計2枚の同一形状の圧電素子430a、430bを固着している。圧電素子430a、430bは、赤外線カットフィルタ410の端部にて上下に延伸する板形状を呈する。
図10は、圧電素子430を説明するための図である。図10に示すように、圧電素子430のB面には銀等の電極が印刷等によって設けられており、このB面の電極は赤外線カットフィルタ410に屈曲振動を励起するための+相と、G相とに分割されている。また、圧電素子430のC面には略全面に電極が設けられており、このC面の電極は不図示の導電材等によってB面のG相と電気的に接続され、それぞれ同電位に保たれる。圧電素子430のB面には不図示のフレキシブルプリント等の導電性連結部材が接着等によって固着されており、+相、G相に、それぞれ所定の電圧を独立して印加できるようになっている。圧電素子430のC面が接着等によって赤外線カットフィルタ410に固着されており、圧電素子430と赤外線カットフィルタ410が一体的に運動するように構成される。
次に、図11、12を参照して、赤外線カットフィルタ410が振動する仕組みと、その振動形状について説明する。図11は、赤外線カットフィルタ410が20個の節を持つモードで振動するときの振動形状を示す側面図である。図12は、赤外線カットフィルタ410が19個の節を持つモードで振動するときの振動形状を示す側面図である。
まず、導電性連結部材を通じて圧電素子430a、430bそれぞれの+相に正の電圧を印加し、それぞれのG相をグランド(0V)としたときの圧電素子430a、430b及び赤外線カットフィルタ410の変形について説明する。
上述した電圧が印加されると、圧電素子430a、430bの+相は面直方向に縮み、面内方向に伸びる。そのため、赤外線カットフィルタ410の圧電素子430a、430bとの接合面は、接合面を面方向に拡大する力を圧電素子430a、430bから受け、圧電素子430a、430bとの接合面側が凸になるような変形をする。よって、圧電素子430a、430bそれぞれの+相に上述した電圧が印加されると、赤外線カットフィルタ410には図11の実線で示すような屈曲変形が生じる。
同様に+相に負の電圧を印加すると、圧電素子430a、430bは上述と伸縮逆向きの変形を生じ、赤外線カットフィルタ410には図11の二点鎖線に示すような屈曲変形が生じる。
次に、導電性連結部材を通じて圧電素子430aの+相に正の電圧、圧電素子430bの+相に負の電圧を印加し、それぞれのG相をグランド(0V)としたときの圧電素子430a、430b及び赤外線カットフィルタ410の変形について説明する。
上述した電圧が印加されると、上述と同様の仕組みによって、圧電素子430aと赤外線カットフィルタ410との接合面は凸になるような変形をし、圧電素子430bと赤外線カットフィルタ410との接合面は凹になるような変形をする。よって、圧電素子430a、430bのそれぞれの+相に上述した電圧が印加されると、赤外線カットフィルタ410には図12の実線で示すような屈曲変形が生じる。
同様に圧電素子430aの+相に負の電圧、430bの+相に正の電圧を印加すると、圧電素子430a、430bは上述と伸縮逆向きの変形を生じ、赤外線カットフィルタ410には図12の二点鎖線に示すような屈曲変形が生じる。
つまり、B相電極の電位をグランドに保ったまま、圧電素子430a、430bそれぞれの+相に印加する電圧を周期的に正負に切り替えると、赤外線カットフィルタ410の凸凹が周期的に切り替わるような屈曲振動が生じる。屈曲振動では図11及び図12に示すように、振動の振幅が実質的に零となる、振動の節部(例えばd1、d2、D1、D2)が出現する。
圧電素子430a、430bそれぞれの+相に印加する周期電圧を同位相とすれば、図11に示すような振動の節の数が偶数個出現する形状の屈曲振動をする。また、圧電素子430a、430bそれぞれの+相に印加する周期電圧を半波長ずらした、逆位相とすれば、図12に示すような振動の節の数が奇数個出現する形状の屈曲振動をする。
この周期的な電圧の周波数は、赤外線カットフィルタ410の固有モードの共振周波数近傍とすることで、より小さい電圧で大きな振幅を得ることができる。赤外線カットフィルタ410の固有モードの共振周波数は、赤外線カットフィルタ410の形状、板厚、材質等によって異なるが、不快な音を発生しないように、共振周波数が可聴域外となるような固有モードを選ぶことが好ましい。
なお、本実施形態においては、20個の節が出現するモード及び19個の節が出現するモードを例に挙げて説明したが、これに限らず、これ以外の振動を発生させるようにしても良いし、3種類以上の振動モードを用いても良い。
次に、本実施形態において、赤外線カットフィルタ410の表面に付着した塵埃等の異物を除去する動作について説明する。クリーニング指示操作部材44が操作されると、クリーニングモード開始の指令を受けて、カメラ本体1をクリーニングモードの状態に移行させる。なお、本実施形態では、クリーニング指示操作部材44を設けたが、本発明はこれに限定されない。例えば、クリーニング指示操作部材44は、機械的なボタンに限らず、カラー液晶モニタ19に表示されるメニュー画面上でカーソルキーや指示ボタン等を用いて指示するものであっても良い。
また、クリーニングモードへの移行は、電源オン時等のような、通常のカメラシーケンス中において自動的に行われるようにしても良いし、撮影回数や日付等を基準として行われるようにしても良い。
電源供給回路110は、クリーニングモードに必要な電力を、カメラ本体1の各部へ必要に応じて供給する。また、これに並行して電源42の電池残量を検出して、その結果をMPU100へ送信する。MPU100は、クリーニングモード開始の信号を受け取ると、圧電素子駆動回路111に駆動信号を送る。圧電素子駆動回路111は、MPU100より駆動信号を受け取ると、赤外線カットフィルタ410の屈曲振動を励起する周期電圧を生成し、圧電素子430に対して印加する。圧電素子430は、その印加される電圧に応じて伸縮し、赤外線カットフィルタ410は屈曲振動をする。
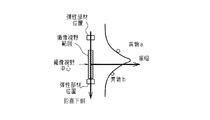
図13は、赤外線カットフィルタ410の鉛直方向の振幅分布と撮像視野中心との相対位置関係、及び、異物の付着位置を示している。図13に示すように、赤外線カットフィルタ410が弾性部材450と当接する箇所では、弾性部材450によって振動が阻害され、振幅が小さくなる。本実施形態では、既述したように、弾性部材450の中心が撮像視野33aの中心に対して上側に配置されている(図13を参照)。そのため、撮像視野33aの中心に対して上側の振幅が下側の振幅よりも大きくなっている。具体的には、上下の弾性部材に当接する近傍で振幅が最も小さくなり、中間付近(すなわち弾性部材450の中心付近)で最も大きくなる。
次に、赤外線カットフィルタ410が上述した屈曲振動したときの、赤外線カットフィルタ410の表面に付着した異物の挙動について、異物の付着している初期位置に応じてそれぞれ説明する。図13に示すように、撮像視野33aの中心に対して上側に付着している異物を異物a、下側に付着している異物を異物bとする。
赤外線カットフィルタ410が振動すると、異物は加速度によって赤外線カットフィルタ410から引き剥がされ、前方へと飛散する。その際、振幅が大きい箇所に付着していた異物は、与えられる加速度が大きく、赤外線カットフィルタ410から遠くへと飛散する。それに対して、振幅が小さい箇所に付着していた異物は、与えられる加速度が小さいため遠くへは飛散せず、赤外線カットフィルタ410近傍で重力によって落下する。赤外線カットフィルタ410近傍で異物が自由落下すると、異物形状の非対称性に起因する落下のゆらぎや、赤外線カットフィルタ410近傍での微小な対流、撮像装置の姿勢等の影響を受ける。その結果、異物が落下中に赤外線カットフィルタ410に触れてしまうことで、赤外線カットフィルタ410の表面に再付着することがある。
図13の例で、異物aは、振幅が大きい箇所に付着しているので、遠くへと飛散し、赤外線カットフィルタ410の表面に再付着することなく除去することができる。
それに対して、異物bは、振幅が小さい箇所に付着しているため、遠くへは飛ばない。しかしながら、異物bの付着位置は撮像視野33aの下端までの距離が短く(下端まで近く)、より短い時間で撮像視野外に移動することが可能となる。
つまり、弾性部材450の中心を撮像視野33aの中心よりも上側に配置することで、一旦は赤外線カットフィルタ410を離れた異物が、撮像視野内で再付着する可能性を軽減し、より安定した除去性能を提供することが可能になる。また、遠くへ飛ばない異物が、重力によって自由落下しながら撮像視野外に出るまでの時間が短いので、異物除去を行うための振動時間を短くしても、一旦除去した異物が再付着する可能性を軽減できる。言い換えれば、異物除去の振動時間を短くすることができ、異物除去に必要な電力を低減することが可能となる。また、重力による落下を利用することで、全体の振幅を大きくする必要がなくなり、赤外線カットフィルタ410が大きな振幅によって破損してしまう確率を低減することが可能になる。
なお、本実施形態では、矩形形状を有する赤外線カットフィルタ410の振動を例に挙げて説明したが、これに限らず、例えば円形板等、板の中心部付近の振幅が大きくなるという傾向を持つ板部材に対して適応可能である。
(第2の実施形態)
次に、図14及び図15を参照して、本発明の第2の実施形態を説明する。以下では、第1の実施形態との相違点を中心に説明し、第1の実施形態で説明した構成要素には同一の符号を付し、その詳細な説明は省略する。
次に、図14及び図15を参照して、本発明の第2の実施形態を説明する。以下では、第1の実施形態との相違点を中心に説明し、第1の実施形態で説明した構成要素には同一の符号を付し、その詳細な説明は省略する。
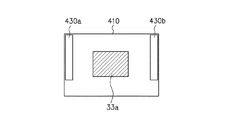
図14に、圧電素子430と撮像視野33aとの相対位置関係を示す。撮像視野33aは斜線で示す。図14に示すように、圧電素子430の中心が撮像視野33aの中心に対して上側に配置されている。
図15は、赤外線カットフィルタ410の鉛直方向の振幅分布と撮像視野中心との相対位置関係、及び、異物の付着位置を示している。圧電素子430が振動の駆動源であるので、圧電素子430が貼着されている箇所の振幅は、圧電素子430が貼着されていない箇所の振幅よりも大きい。図14に示すように、圧電素子430が上側に寄って貼着されていると、赤外線カットフィルタ410のうち貼着されていない下側の部分が、振動を妨げる質量となり、減衰要因となる。従って、圧電素子430が貼着されている部分でも振幅に差が生じ、図15に示すように下側ほど減衰率が大きく(振幅が小さく)なる。本実施形態では、既述したように、圧電素子430の中心が撮像視野33aの中心に対して上側に配置されている(図14を参照)。そのため、撮像視野33aの中心に対して上側の振幅が下側の振幅よりも大きくなっている。
次に、赤外線カットフィルタ410が上述した屈曲振動したときの、赤外線カットフィルタ410の表面に付着した異物の挙動について、異物の付着している初期位置に応じてそれぞれ説明する。図15に示すように、撮像視野33aの中心に対して上側に付着している異物を異物a、下側に付着している異物を異物bとする。
図15の例で、異物aは、振幅が大きい箇所に付着しているので、遠くへと飛散し、赤外線カットフィルタ410の表面に再付着することなく除去することができる。
それに対して、異物bは、振幅が小さい箇所に付着しているため、遠くへは飛ばない。しかしながら、異物bの付着位置は撮像視野33aの下端までの距離が短く(下端まで近く)、より短い時間で撮像視野外に移動することが可能となる。
つまり、圧電素子430の中心を撮像視野33aの中心よりも上側に配置することで、一旦は赤外線カットフィルタ410を離れた異物が、撮像視野内で再付着する可能性を軽減し、より安定した除去性能を提供することが可能になる。また、遠くへ飛ばない異物が、重力によって自由落下しながら撮像視野外に出るまでの時間が短いので、異物除去を行うための振動時間を短くしても、一旦除去した異物が再付着する可能性を軽減できる。言い換えれば、異物除去の振動時間を短くすることができ、異物除去に必要な電力を低減することが可能となる。また、重力による落下を利用することで、全体の振幅を大きくする必要がなくなり、赤外線カットフィルタ410が大きな振幅によって破損してしまう確率を低減することが可能になる。
(第3の実施形態)
次に、図16〜図18を参照して、本発明の第3の実施形態を説明する。以下では、第1の実施形態との相違点を中心に説明し、第1の実施形態で説明した構成要素には同一の符号を付し、その詳細な説明は省略する。
次に、図16〜図18を参照して、本発明の第3の実施形態を説明する。以下では、第1の実施形態との相違点を中心に説明し、第1の実施形態で説明した構成要素には同一の符号を付し、その詳細な説明は省略する。
図16に、赤外線カットフィルタ410と撮像視野33aとの相対位置関係を示す。撮像視野33aは斜線で示す。図16に示すように、赤外線カットフィルタ410の中心が撮像視野33aの中心に対して上側に配置されている。
図17は、赤外線カットフィルタ410単体での鉛直方向の振幅分布を示している。図17に示すように、上述した周期的な振動の腹・節の関係とは別に、板端部よりも板中央付近の方が大きな振幅が得られる傾向にあることが、板単体の固有振動モード解析等から一般的に知られている。
図18は、赤外線カットフィルタ410の鉛直方向の振幅分布と撮像視野中心との相対位置関係、及び、異物の付着位置を示している。本実施形態では、既述したように、赤外線カットフィルタ410の中心が撮像視野33aの中心に対して鉛直上側に配置されている(図16を参照)。そのため、撮像視野33aの中心に対して上側の振幅が下側の振幅よりも大きくなっている。
次に、赤外線カットフィルタ410が上述した屈曲振動したときの、赤外線カットフィルタ410の表面に付着した異物の挙動について、異物の付着している初期位置に応じてそれぞれ説明する。図18に示すように、赤外線カットフィルタ410の中心に対して上側に付着している異物を異物aとする。また、赤外線カットフィルタ410の鉛直方向中心付近に付着している異物を異物bとする。また、赤外線カットフィルタ410の中心に対して下側に付着している異物を異物cとする。
図18の例で、異物aは、振幅が小さい箇所に付着しているので、遠くへは飛ばない。しかしながら、図18を参照して説明した通り、赤外線カットフィルタ410の中心が撮像視野33aの中心に対して上側に配置される構成のため、赤外線カットフィルタ410の中心を撮像視野中心と一致させる通常の構成と比較し、異物aの付着位置は撮像視野33aの上端から遠く離れている。したがって、撮像視野33aに入るまでに赤外線カットフィルタ410の表面に再付着する可能性がより高い。
異物bは、振幅が大きい箇所に付着しているので、遠くへと飛散し、赤外線カットフィルタ410の表面に再付着することなく除去することができる。
異物cは、振幅が小さい箇所に付着しているため、遠くへは飛ばない。しかしながら、赤外線カットフィルタ410の中心を撮像視野中心と一致させる通常の構成と比較し、異物cの付着位置は撮像視野33aの下端までの距離が短く、より短い時間で撮像視野外に移動することが可能となる。
つまり、赤外線カットフィルタ410の中心を撮像視野33aの中心よりも上側に配置することで、一旦は赤外線カットフィルタ410を離れた異物が、撮像視野内で再付着する可能性を軽減し、より安定した除去性能を提供することが可能になる。また、遠くへ飛ばない異物が、重力によって自由落下しながら撮像視野外に出るまでの時間が短いので、異物除去を行うための振動時間を短くしても、一旦除去した異物が再付着する可能性を軽減できる。言い換えれば、異物除去の振動時間を短くすることができ、異物除去に必要な電力を低減することが可能となる。また、重力による落下を利用することで、全体の振幅を大きくする必要がなくなり、赤外線カットフィルタ410が大きな振幅によって破損してしまう確率を低減することが可能になる。
以上、本発明を種々の実施形態と共に説明したが、本発明はこれらの実施形態にのみ限定されるものではなく、本発明の範囲内で変更等が可能である。例えば、上記実施形態では、赤外線カットフィルタ410に屈曲振動を励起する構成としたが、本発明でいう光学部材としては、赤外線カットフィルタ410に限定されるものではない。略矩形状を有し、入射される光束を所望の光束に変調して射出するフィルタ、例えば複屈折板、位相板及び赤外線カットフィルタ410の貼り合わせによって構成される光学ローパスフィルタや複屈折板もしくは位相板単体に屈曲振動を励起させる構成にしても良い。
また、上記実施形態では、本発明を適応する光学装置として、被投影部材として撮像素子33を用いる撮像装置を例に説明したが、これに限らず、被投影部材としてスクリーンを用いる液晶プロジェクタ等であってもよい。
1 カメラ本体
2 マウント部
33 撮像素子
33a 撮像視野
400 撮像ユニット
410 赤外線カットフィルタ
430 圧電素子
450 弾性部材
460 付勢部材
470 振動ユニット
500 撮像素子ユニット
2 マウント部
33 撮像素子
33a 撮像視野
400 撮像ユニット
410 赤外線カットフィルタ
430 圧電素子
450 弾性部材
460 付勢部材
470 振動ユニット
500 撮像素子ユニット
Claims (6)
- 光学像が結像する被投影部材と、
前記被投影部材の前方に配設された光学部材と、
前記光学部材に振動を与える加振部材とを備え、
前記光学部材の振動は、前記被投影部材の視野中心に対して上側の振幅が下側の振幅よりも大きいことを特徴とする光学装置。 - 前記被投影部材の視野を囲むように配置されて前記光学部材と当接する弾性部材を備え、
前記弾性部材の中心が前記被投影部材の視野中心よりも上側に配置されることを特徴とする請求項1に記載の光学装置。 - 前記加振部材は前記光学部材の左右端のうち少なくともいずれか一方に上下に延伸する形態で設けられており、
前記加振部材の中心が前記被投影部材の視野中心よりも上側に配置されることを特徴とする請求項1に記載の光学装置。 - 前記光学部材の中心が前記被投影部材の視野中心よりも上側に配置されることを特徴とする請求項1に記載の光学装置。
- 前記光学部材は、入射される光束を変調して射出する光学部材であることを特徴とする請求項1〜4のいずれか1項に記載の光学装置。
- 前記光学部材は、赤外線カットフィルタであることを特徴とする請求項5に記載の光学装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007334687A JP2009159268A (ja) | 2007-12-26 | 2007-12-26 | 光学装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007334687A JP2009159268A (ja) | 2007-12-26 | 2007-12-26 | 光学装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009159268A true JP2009159268A (ja) | 2009-07-16 |
Family
ID=40962800
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007334687A Pending JP2009159268A (ja) | 2007-12-26 | 2007-12-26 | 光学装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009159268A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101029079B1 (ko) | 2008-11-06 | 2011-04-18 | 삼성전자주식회사 | 촬상 소자 유닛 및 촬상 장치 |
| JP2013238728A (ja) * | 2012-05-15 | 2013-11-28 | Kyocera Crystal Device Corp | 光学部品及び光学装置 |
| JP2014216851A (ja) * | 2013-04-25 | 2014-11-17 | キヤノン株式会社 | 塵埃除去装置、その製造方法および撮像装置 |
-
2007
- 2007-12-26 JP JP2007334687A patent/JP2009159268A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101029079B1 (ko) | 2008-11-06 | 2011-04-18 | 삼성전자주식회사 | 촬상 소자 유닛 및 촬상 장치 |
| US8493506B2 (en) | 2008-11-06 | 2013-07-23 | Samsung Electronics Co., Ltd. | Imaging device unit and imaging apparatus for removing dust from an optical device |
| JP2013238728A (ja) * | 2012-05-15 | 2013-11-28 | Kyocera Crystal Device Corp | 光学部品及び光学装置 |
| JP2014216851A (ja) * | 2013-04-25 | 2014-11-17 | キヤノン株式会社 | 塵埃除去装置、その製造方法および撮像装置 |
| KR20150145246A (ko) * | 2013-04-25 | 2015-12-29 | 캐논 가부시끼가이샤 | 먼지 제거 장치, 그 제조 방법 및 촬상 장치 |
| US9519140B2 (en) | 2013-04-25 | 2016-12-13 | Canon Kabushiki Kaisha | Dust removing device, manufacturing method for same, and image pickup apparatus |
| KR101727425B1 (ko) * | 2013-04-25 | 2017-04-14 | 캐논 가부시끼가이샤 | 먼지 제거 장치, 그 제조 방법 및 촬상 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4810458B2 (ja) | 撮像装置 | |
| JP4347288B2 (ja) | 撮像装置 | |
| JP5004677B2 (ja) | 光学装置 | |
| US8159603B2 (en) | Image capturing apparatus with frame for sealing between optical member and image sensor | |
| JP5110971B2 (ja) | 光学装置 | |
| JP2009010736A (ja) | 撮像装置、その制御方法及びプログラム | |
| JP4719705B2 (ja) | 撮像装置及び撮像ユニット | |
| JP4891154B2 (ja) | 光学装置 | |
| JP4804251B2 (ja) | 撮像装置及び撮像ユニット | |
| JP2015231173A (ja) | 撮像装置 | |
| JP2009159268A (ja) | 光学装置 | |
| JP4781187B2 (ja) | 撮像装置 | |
| JP5264302B2 (ja) | 撮像装置 | |
| JP4759462B2 (ja) | 撮像装置及び撮像ユニット | |
| JP2008236669A (ja) | 撮像装置及びその制御方法及びプログラム及び記憶媒体 | |
| JP5159198B2 (ja) | 撮像装置 | |
| JP2008203554A (ja) | 撮像装置 | |
| JP2010226395A (ja) | 撮像装置、その制御方法及びプログラム | |
| JP4697986B2 (ja) | 撮像装置 | |
| JP4921060B2 (ja) | 撮像装置及び撮像ユニット | |
| JP2010127986A (ja) | 撮像装置 | |
| JP4926586B2 (ja) | 撮像装置及び撮像ユニット | |
| JP5268236B2 (ja) | 撮像装置及び撮像ユニット | |
| JP5170991B2 (ja) | 撮像装置 | |
| JP2008028615A (ja) | 撮像装置 |