JP2009165244A - 電力供給システム - Google Patents
電力供給システム Download PDFInfo
- Publication number
- JP2009165244A JP2009165244A JP2007341286A JP2007341286A JP2009165244A JP 2009165244 A JP2009165244 A JP 2009165244A JP 2007341286 A JP2007341286 A JP 2007341286A JP 2007341286 A JP2007341286 A JP 2007341286A JP 2009165244 A JP2009165244 A JP 2009165244A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- fuel cell
- boost converter
- power
- battery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images































Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/30—Hydrogen technology
- Y02E60/50—Fuel cells
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Secondary Cells (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Fuel Cell (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
【解決手段】駆動装置16の駆動に伴う負荷回路15への要求電圧を算出する手段と、燃料電池スタック11の端子電圧が負荷回路15の要求電圧を超える場合に、第1の電圧変換器12を停止させて燃料電池スタックの出力電力を負荷回路に伝達する手段と、第2の電圧変換器14を通じて負荷回路の入力電圧を制御することによって燃料電池スタック11の端子電圧を所定の基準電圧以下に制限する第1の電圧制限手段と、を有する。
【選択図】図1
Description
電池スタックの端子電圧が負荷回路の要求電圧を超える場合に、第1の電圧変換器を停止させて燃料電池スタックの出力電力を負荷回路に伝達する手段と、第2の電圧変換器を通じて負荷回路の入力電圧を制御することによって燃料電池スタックの端子電圧を所定の基準電圧以下に制限する第1の電圧制限手段と、を有する。
蓄電装置の充電状態を検知する充電センサをさらに備え、制御部は、蓄電装置の充電状態とその充電状態で蓄電装置において放電すべき電力との関係を記録した放電要求マップを保持する手段と、負荷に供給すべき要求電力を算出する手段と、充電状態が許容レベルを超えたときに、要求電力から蓄電装置において放電すべき電力を除外した燃料電池スタック要求電力を算出する手段と、燃料電池スタック要求電力を燃料電池スタックから出力させるために前記燃料電池スタックの端子電圧の目標値を設定する手段と、端子電圧の目標値が基準電圧を越える場合に、目標値を前記基準電圧以下の値に再設定する手段と、燃料電池スタックの端子電圧が目標値となるにように前記第1の電圧変換器を制御する手段とをさらに備える。
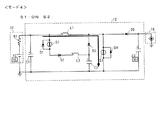
図1は、本発明に係る燃料電池システム10の概略構成および、該燃料電池システム10より供給される電力を駆動源とする移動体の車両1を概略的に示す。車両1は、駆動輪2が駆動モータ(以下、単に「モータ」という。)16によって駆動されることで自走し、移動可能となる。このモータ16は、いわゆる三相交流モータであって、インバータ15から交流電力の供給を受ける。更に、このインバータ15へは、燃料電池システム10のメイン電力源である燃料電池(以下、「FC」ともいう。)11と、二次電池であるバッテリ13から直流電力が供給され、それがインバータ15で交流へ変換されている。
バータ15との間にもバッテリ昇圧コンバータ14を設けることで、インバータ15への供給電圧の高電圧化が図られる。繰り返しにはなるが、このバッテリ昇圧コンバータ14に代えて昇降圧型のコンバータも採用可能である。
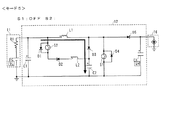
接続される。尚、この第二直列接続体の回路トポロジーについては、コイルL2、ダイオードD2、スイッチ素子S2等によるスイッチング回路の直列順序は、適宜入れ替えた形態も採用し得る。特に、図2に示す状態に代えて、コイルL2とスイッチ素子S2等によるスイッチング回路の順序を入れ替えることで、実際の実装回路ではコイルL1とコイルL2は一体化でき、半導体素子のモジュール化が容易となる。
タ16の逆起電圧は、車両1の速度が上昇していくに従い、増加していくため、モータ必要電圧も車両速度の増加とともに増加していく。ここで、燃料電池11の出力電圧LV1とモータ必要電圧LV2との相関において、両者が交差するときの車両1の速度VS0が、ユーザによる車両1の通常操縦を概ね賄う速度となるように、燃料電池11の電圧特性とモータ16の電圧特性とを決定すればよい。本実施例においては、車両運転法規やユーザの通常操縦の傾向等から、VS0を110km/hと設定する。そして、この速度VS0での車両1の走行を可能とするモータ16の駆動時の最大出力を算出し、当該最大出力の発揮が可能となるように、インバータ15に印加すべき電圧(モータ必要電圧)を導出する。そして、このモータ必要電圧が、FC昇圧コンバータ12を介さずに燃料電池11から直接に出力可能となるように、燃料電池11の設計(例えば、複数のセルが積層されて形成される燃料電池では、その積層セル数が調整される等)が行われる。
領域においては、FC昇圧コンバータ12を停止させるとバッテリ13の出力電圧がFC昇圧コンバータ12の出口電圧より高い状態となるので、バッテリ昇圧コンバータ14の昇圧動作による燃料電池11とバッテリ13の出力分配制御が不可能となる。従って、この状態ではFC昇圧コンバータ12の動作停止が許容されない。
ち車両1のアクセル開度が100%である場合(図中、負荷率=100%)のFC昇圧コンバー
タ12の入口電圧とその出口電圧との関係が、一点鎖線LL2で示されている。従って、車両1に搭載される燃料電池システム10は、車両1を駆動させるという観点からは、一点鎖線LL1とLL2とで挟まれた領域で示される昇圧動作を、FC昇圧コンバータ12に行わせることになる。
囲まれて画定される領域RC1においては、FC昇圧コンバータ12の昇圧動作を完全に停止させる。これにより、FC昇圧コンバータ12におけるスイッチング損失を抑えることが可能となる。このように、電圧Vfcbを境界としてFC昇圧コンバータ12の動作停止が制約を受けるのは、上述の通りバッテリ昇圧コンバータ14が昇圧型のコンバータでありその昇圧動作確保のためである。
動作停止について上記電圧Vfcbによる制約を受けることがなくなる。従って、図8Bに示すように、直線LR1よりも下の領域については、FC昇圧コンバータ12の動作を制約無く停止しシステムの効率を向上させることが容易となる。従って、この結果、図8Bにおいては上記領域RC2に相当する領域が存在しないことになる。ここで、以下に示すマップの説明は、図8Aおよび図8Bに共通に当てはまるため、その説明はまとめて行う。
、直線LR2より上に位置する領域を、ソフトスイッチング処理によるスイッチング損失の抑制が効率的に行われるソフトスイッチ領域RC4とする。
(要求トルク)=(上記最大トルク)×(アクセルペダルの開度に応じた係数)
(要求出力)=(要求トルク)×(モータの回転数)
料電池11の出力電圧で除して暫定昇圧比Rt(=Vmot/Vfc)が算出される。S206の処理が終了すると、S207へ進む。
3で示したソフトスイッチング処理が実行される。尚、スイッチ素子S1のデューティ比は、暫定昇圧比Rtと追加昇圧比Raの積に従って決定される。
以下、燃料電池の高電位回避制御について説明する。燃料電池では、Pt触媒の表面での水(およびプロトンに対する)に対する酸化還元により、Pt触媒が凝集するシンタリング現象が誘発される場合がある。この酸化還元反応は、燃料電池セルの出力電圧が開放電圧(OCV)に近い、比較的高電位で引き起こされることが知られている。そこで、燃料電池システム10は、FC昇圧コンバータ12、あるいは、バッテリ昇圧コンバータ14を通じて、FC出力電圧を制御し、シンタリングの原因となる燃料電池の高電位での発電を抑制する。
を判定する(S2083)。この場合、近づいたか否かは、FC端子電圧と基準値(Vfc
_OCV_REF)との差異が、許容値未満になったか否かで判定すればよい。また、この場合の基準値(Vfc_OCV_REF)とは、シンタリング現象を誘発するFCセルの酸化還元反応
電位をFCの端子電圧に換算した値である。換算は、例えば、実験的(または理論的)にFCセルの各酸化還元反応電位を求め、直列に接続されるFCセル数分加算した値を基に、安全率を反映して得られている。
は、バッテリ昇圧コンバータ14の出力電圧を基準値(Vfc_OCV_REF)より小さくなる
ように維持する。図1のように、バッテリ昇圧コンバータ14の出力端子は、FC昇圧コンバータ12の出力端子と並列に、インバータ15に接続されている。また、FC昇圧コンバータ12は、停止しているため、直流的に、リアクトルを通じて、インバータ15に接続されている。したがって、バッテリ昇圧コンバータ14の出力電圧が、基準値(Vfc
_OCV_REF)よりも、小さくなるように維持することで、直接、FC端子電圧が基準値(Vfc_OCV_REF)より十分に小さく維持できる。
近づいた場合には、ECU20が、バッテリ昇圧コンバータ14を通じて、FCの端子電圧が、基準値(Vfc_OCV_REF)以下になるように制御する。これによって、FC昇圧コ
ンバータ12が停止中であっても、バッテリ昇圧コンバータ14により、FCの高電位状態を回避でき、シンタンリング現象の誘発を抑制できる。
今、何らかの原因でバッテリ13の端子電圧が上昇した場合を考える。図1の構成では、FC昇圧コンバータ12、バッテリ昇圧コンバータ14ともに、昇圧コンバータを使用している。また、燃料電池11自体は、シンタリングを回避するための基準値(Vfc_OCV_REF)未満に制御する必要がある。
13のSOCが満充電に近づいた場合、バッテリが劣化した場合、バッテリが低温下に置かれた場合等で、バッテリの出力電圧が上昇した場合である。
る。
、この場合も、監視処理は、ECU20の制御と並行して実行すればい。そして、ECU20は、バッテリ端子電圧が、インバータ15の要求電圧以上か否かを判定する(S2102)。
FC端子電圧が、上記基準値(Vfc_OCV_REF)に近づいた場合には、ECU20は、F
C昇圧コンバータ12によって、FC端子電圧を上記基準値(Vfc_OCV_REF)よりも小
さく低下する方向に制御する。
方向に制御することによって、FC昇圧コンバータ12の出力端子側は、バッテリ13の端子電圧より低くなり得る。したがって、燃料電池11で発電された電力は、バッテリ13の充電には供給できない場合があり得る。この場合、燃料電池11で発電された電力は、第1には、インバータ15を通じて、モータ16に供給される。さらに、余剰の電力が発生した場合には、補機を通じて、余剰電力が消費されることになる。
な制御によって、可能な限り効率を向上させた上で、燃料電池11でのシンタリング現象を低減できる。
図12では、FC昇圧コンバータ12を停止した場合の燃料電池システム10の制御について説明した。また、図13では、バッテリ昇圧コンバータ14を停止した場合の燃料電池システム10の制御について説明した。ここでは、さらに、FC昇圧コンバータ12
とバッテリ昇圧コンバータ14とが協調して、システムの燃料効率の向上と、シンタリングの回避とを実現するための制御について説明する。
ータ回転数と要求トルクにしたがって、FC昇圧コンバータ12を制御した場合、燃料電池11で発電された電力が消費されず、FC端子電圧が基準値(Vfc_OCV_REF)を越え
てしまう場合が生じ得る。そこで、ECU20は、特に、低負荷、かつ、高速回転に対応したシンタリング現象に至る高電位回避のための制御を実行する。
0%の場合には、放電要求がないことを示す。放電要求電力がある場合が、許容レベルを超えたときに相当する。ただし、図15は、一例であり、許容レベルが20%(あるいは40%)に限定されるわけではない。
タリング現象回避のための基準値(Vfc_OCV_REF)より小さい場合、ECU20は、制
御をS211Aに進める。
を実行するECU20が、基準電圧未満の値に再設定する手段に相当する。また、この処理を実行するECU20が、第1の電圧変換器を制御する手段に相当する。
分ではないからである。そこで、余剰電力は、補機で消費されることになる。
以上述べた処理によれば、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の両方を使用し、燃料電池11とバッテリ13の状態に応じて、モータ16に電力を供給できる。特に、バッテリ13のSOCが高い充電率であり、モータの逆起電力が高く、かつ、モータ要求電力が大きくない場合であっても、本実施形態の電力供給システムによれば、燃料電池11の高電位状態を回避した上、燃料電池11とバッテリ13によるモータ16への電力供給システムを実現できる。
モータ逆起電力が低い場合(例えば、停車中)には、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方を停止してもよい。その場合に、燃料電池11の高電位回避制御は、上記2つの昇圧コンバータによる制御によってはなされない。しかし、ECU20は、燃料電池11の端子電圧を監視して、燃料電池11の電力を消費することによって、高電位を回避する。その場合の処理を図16に示す。この処理では、ECU20は、まず、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方を停止する(S2211)。
2213)。この判定は、図12のS2083と同様である。
は、補機によるFC電力の消費を促進する(S2214)。さらに、ECU20は、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14のいずれか、または双方の起動が必要か否かを判定する(S2215)。これらの起動が必要ない場合には、ECU20は、制御をS221に戻す。一方、これらの起動が必要である場合には、ECU20は、リターンする。したがって、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方停止処理が終了する。
図17から図20の図面を参照して、本発明の第2実施形態に係る燃料電池システムを説明する。上記第1実施形態では、ソフトスイッチングを行う補助回路を備えた燃料電池システムについて説明した。しかし、本発明の実施は、そのような構成に限定されるわけではない。ここでは、補助回路のない構成にて、電力効率の向上と、高電位回避を実行する燃料電池システムを説明する。他の構成および作用は、第1実施形態と同様である。そこで、第1実施形態と同一の構成要素については、同一の符号を付して、その説明を省略する。
)と、燃料電池11の電圧を変換して、インバータ15に伝達するFC昇圧コンバータ12A(第1の電圧変換器に相当)と、バッテリ13(蓄電装置に相当)と、バッテリ13の電圧を変換して、インバータ15に伝達するバッテリ昇圧コンバータ14A(第2の電圧変換器に相当)と、図示しないモータに電力を供給するインバータ15(負荷回路に相当)とを有している。
らスイッチング波形を発生させ、さらに、リアクトルの両端に高電圧を発生させ、コンデンサで平滑化して、直流電圧を変換する。そのような動作は周知であるので、ここでは、その説明を省略する。
未満になったか否かで判定すればよい。
よって高電位回避が可能な場合には、ECU20は、制御をS102に戻す。一方、補機の電力消費によって高電位回避が可能でない場合、ECU20は、バッテリ昇圧コンバータ14Aを起動する。そして、ECU20は、バッテリ昇圧コンバータ14Aによって、燃料電池11の端子電圧を低下させる(S405)。この場合には、燃料電池11で発電された電力は、例えば、補機の他、停車中の車両1のモータ16で消費され、あるいは、バッテリ13を充電するのに使用される。その後、ECU20は、制御をS100に戻す。
実行するECU20が、第2の電圧制限手段に相当する。
本発明に係る燃料電池システムの第3実施形態について、図21〜23に基づいて説明する。本実施形態に係る燃料電池システムと上述の第1実施形態に係る燃料電池システムとの相違点は、FC昇圧コンバータ12内の補助回路12bおよびそれに関連する技術である。そこで、本実施形態では、当該相違点に着目して説明を行う。
ている電圧を可及的に下げることができ、以てスイッチング損失をより確かに抑制することができる。尚、FC昇圧コンバータ12の出口電圧VHとその入口電圧VLの関係において、比VH/VLが所定値を超える場合(本実施形態では2を超える場合)は、スナバコンデンサC2の電荷はモード2の動作により抜けきっているため、S301の処理を必ずしも行う必要はない。
<回生電力の燃料電池側への逆流の防止>
本燃料電池システム10には、回生電力を発生させる回生ブレーキを採用してもよい。その場合に、回生電力は、スナバコンデンサC2(図2参照)に蓄積されることになる。そして、ソフトスイッチング時、スナバコンデンサC2に蓄えられた回生電力がFCへ入力されないようにするため、スナバコンデンサC2からFCへ流れる電気回路上に回生電力を抑える素子を設け、あるいは、スナバコンデンサC2に蓄えられた回生電力が二次バッテリへ流れるようにしてもよい。FCへ流れる回生電力を抑える方法としては、例えば、スナバコンデンサC2からFCへ流れる電路上に、一端が接地された平滑コンデンサ、ツェナダイオード、又はバリスタを設けることで係る電路の電圧が規定以上になるのを抑制し、あるいは、スナバコンデンサC2からFCへ回生電力が逆流するのを防止するダイオードを設ける方法が挙げられる。また、回生電力を二次バッテリへ流れるようにする方法としては、例えば、S2の下流側をFCではなく二次バッテリへ繋ぐ回路構成にする方法が挙げられる。
また、本燃料電池システム10は、車両1の衝突時に,燃料電池11の出力を遮断するシステムとしてもよい。具体的には、燃料電池システム10のFC昇圧コンバータ12の下流側には,インバータ15及びバッテリ昇圧コンバータ14との電気的な接続をON/OFFするためのリレー回路が設けてもよい。なお、既に説明した構成から明らかなように,燃料電池システム10は、FC昇圧コンバータ12の下流側に流れる電流量が比較的に少ないものとなっている。このため、燃料電池システム10は、上記リレー回路として、既存の同種のシステムでは燃料電池の直後に設けられているリレー回路よりも,小型のもの(低電流用のもの)を採用したシステムとなっている。
さらに、上記実施形態で説明したように、図11に示すFC昇圧コンバータ制御における処理S205では、アクセルペダルセンサ21によって検出されたアクセルペダルの開度に従って発電が行われている燃料電池11の出力電圧が検出される。本変形例では、燃料電池11の出力電圧の検出について、該燃料電池11の出力(以下、FC出力という)に基づいて、燃料電池11の出力電圧を算出することとする。ここで、FC出力は、以下の式(1)に従って算出される。
(FC出力)=(要求出力)+(補機要求出力)+(バッテリ充電(放電)出力)・・・(1)
する。バッテリ13の残蓄電量がSOC閾値以上であれば、バッテリ放電出力を上記(1)にマイナス分として算入し、FC出力を算出する。そして、上記式(1)で算出したFC出力に基づいて、燃料電池11の出力電圧が算出される。具体的には、FC出力と燃料電池11の出力電流とが関連付けられているIP特性MAP及び燃料電池11の出力電流と燃料電池11の出力電圧とが関連付けられているIV特性マップをECU20が有しており、FC出力に従ってこれらのマップにアクセスし、燃料電池11の出力電圧が算出される。本変形例によれば、補機に要求されている出力やバッテリ13の残蓄電量を加味して、FC出力を算出することにより、補機に要求されている出力やバッテリ13の残蓄電量を考慮して、燃料電池11の出力電圧を算出することができる。
(FC出力)=(要求出力)+(補機要求出力)+(バッテリ充電(放電)出力)+(F
C昇圧コンバータ12のスイッチング損失)+(バッテリ昇圧コンバータ14のスイッチ
ング損失)・・・(2)
このように変形することにより、FC昇圧コンバータ12のスイッチング損失やバッテリ昇圧コンバータ14のスイッチング損失を更に加味して、FC出力を算出することにより、FC昇圧コンバータ12のスイッチングの損失分やバッテリ昇圧コンバータ14のスイッチングの損失分を考慮して、燃料電池11の出力電圧を算出することができる。
図24A、図24B及び図24Cにおける点Aは、要求トルクT1とモータ16の回転数R1とに基づいて決定されたものであり、点Bは、要求トルクT2とモータ16の回転数R2とに基づいて決定されたものである。
10・・・・燃料電池システム
11・・・・燃料電池(FC)
12・・・・FC昇圧コンバータ
12a・・・・メイン昇圧回路
12b・・・・補助回路
13・・・・バッテリ
14・・・・バッテリ昇圧コンバータ
15・・・・インバータ
16・・・・モータ
20・・・・ECU
21・・・・アクセルペダルセンサ
S1、S2、S3・・・・スイッチ素子
C1、C3・・・・平滑コンデンサ
C2・・・・スナバコンデンサ
L1、L2、L3・・・・コイル
D1、D2、D3、D4、D5・・・・ダイオード
Claims (4)
- 移動体に搭載され、負荷回路を通じて前記移動体の駆動装置に電力を供給する電力供給システムであって、
前記負荷回路に電力を供給する燃料電池スタックと、
電力を蓄積するとともに、前記負荷回路に電力を供給可能な蓄電装置と、
前記燃料電池スタックと前記負荷回路との間に設けられ前記燃料電池スタックの端子電圧を前記負荷回路の入力電圧に変換する第1の電圧変換器と、
前記蓄電装置の端子電圧を前記負荷回路の入力電圧に変換する第2の電圧変換器と、
制御部と、を備え、
前記制御部は、前記駆動装置の駆動に伴う前記負荷回路の要求電圧を算出する手段と、
前記燃料電池スタックの端子電圧が前記負荷回路の要求電圧を超える場合に、前記第1の電圧変換器を停止させて前記燃料電池スタックの出力電力を前記負荷回路に伝達する手段と、
前記第2の電圧変換器を通じて前記負荷回路の入力電圧を制御することによって前記燃料電池スタックの端子電圧を所定の基準電圧以下に制限する第1の電圧制限手段と、を有する電力供給システム。 - 前記第2の電圧変換器は昇圧回路であり、
前記制御部は、
前記第2の電圧変換器の蓄電装置側の電圧に対して前記負荷回路側の電圧が昇圧された関係にないときに前記第2の電圧変換器を停止する手段と、
前記第2の電圧変換器が停止したときに第1の電圧変換器を動作させて、前記燃料電池スタックの端子電圧を前記基準電圧以下に制限する第2の電圧制限手段と、を有する請求項1に記載の電力供給システム。 - 前記蓄電装置の充電状態を検知する充電センサをさらに備え、
前記制御部は、
蓄電装置の充電状態とその充電状態で蓄電装置において放電すべき電力との関係を記録した放電要求マップを保持する手段と、
前記負荷に供給すべき要求電力を算出する手段と、
前記充電状態が許容レベルを超えたときに、前記要求電力から前記蓄電装置において放電すべき電力を除外した燃料電池スタック要求電力を算出する手段と、
前記燃料電池スタック要求電力を前記燃料電池スタックから出力させるために前記燃料電池スタックの端子電圧の目標値を設定する手段と、
前記端子電圧の目標値が前記基準電圧を越える場合に、前記目標値を前記基準電圧以下の値に再設定する手段と、
前記燃料電池スタックの端子電圧が前記目標値となるにように前記第1の電圧変換器を制御する手段とをさらに備える請求項1または2に記載の電力供給システム。 - 前記制御部は、
前記移動体の移動を指令する操作レバーの位置を検知する手段と、
前記操作レバーの位置が停止を指令している場合に、第1の電圧変換器および第2の電圧変換器を停止する手段と、
第1の電圧変換器および第2の電圧変換器が停止し、かつ、前記燃料電池スタックの端子電圧が前記基準電圧から所定の範囲に近づいたときに、補機を通じて前記燃料電池スタックの電力を消費する手段と、をさらに備える請求項1から3のいずれか一項に記載の電力供給システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007341286A JP4844556B2 (ja) | 2007-12-28 | 2007-12-28 | 電力供給システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007341286A JP4844556B2 (ja) | 2007-12-28 | 2007-12-28 | 電力供給システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009165244A true JP2009165244A (ja) | 2009-07-23 |
| JP4844556B2 JP4844556B2 (ja) | 2011-12-28 |
Family
ID=40967204
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007341286A Expired - Fee Related JP4844556B2 (ja) | 2007-12-28 | 2007-12-28 | 電力供給システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4844556B2 (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010143247A1 (ja) * | 2009-06-08 | 2010-12-16 | トヨタ自動車株式会社 | 燃料電池システムおよびその電力制御方法 |
| JP2011097669A (ja) * | 2009-10-27 | 2011-05-12 | Ricoh Co Ltd | 充電回路及び充電方法 |
| JP2011205735A (ja) * | 2010-03-24 | 2011-10-13 | Toyota Motor Corp | 燃料電池車両 |
| WO2013001343A2 (en) | 2011-06-28 | 2013-01-03 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and control method therefor |
| JP2013062153A (ja) * | 2011-09-14 | 2013-04-04 | Honda Motor Co Ltd | 燃料電池車両 |
| JP2013169076A (ja) * | 2012-02-15 | 2013-08-29 | Toyota Motor Corp | 移動体の運転方法及び移動体 |
| JP2013180645A (ja) * | 2012-03-01 | 2013-09-12 | Toyota Motor Corp | 報知装置、車両および報知装置の制御方法 |
| JP2014166103A (ja) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | 電力システム及び燃料電池車両 |
| JP2014166104A (ja) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | 電力システム及び燃料電池車両 |
| JP2015035840A (ja) * | 2013-08-07 | 2015-02-19 | スズキ株式会社 | 燃料電池車両 |
| JP2015038882A (ja) * | 2014-10-20 | 2015-02-26 | トヨタ自動車株式会社 | 燃料電池システム |
| JP2016010268A (ja) * | 2014-06-25 | 2016-01-18 | 本田技研工業株式会社 | 2電源負荷駆動燃料電池システム及び燃料電池自動車 |
| JP2016091647A (ja) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | 燃料電池システムの制御方法及び燃料電池自動車 |
| JP2016092893A (ja) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | 燃料電池システムの制御方法及び燃料電池自動車 |
| JP2016091648A (ja) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | 燃料電池システムの制御方法及び燃料電池自動車 |
| JP2016207435A (ja) * | 2015-04-22 | 2016-12-08 | 株式会社デンソー | 燃料電池車両 |
| JP2017139150A (ja) * | 2016-02-04 | 2017-08-10 | トヨタ自動車株式会社 | 燃料電池システム |
| JP2018121393A (ja) * | 2017-01-23 | 2018-08-02 | 株式会社Subaru | 電動車両の制御装置及び電動車両 |
| JP2018198213A (ja) * | 2018-07-26 | 2018-12-13 | 株式会社デンソー | 燃料電池車両 |
| JP2021118064A (ja) * | 2020-01-23 | 2021-08-10 | 株式会社豊田自動織機 | 燃料電池システム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180236890A1 (en) * | 2015-08-19 | 2018-08-23 | Fca Fiat Chrysler Automoveis Brasil Ltda. | System and Method of Battery Monitoring |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000036308A (ja) * | 1998-07-16 | 2000-02-02 | Toyota Motor Corp | 燃料電池システム |
| JP2003229138A (ja) * | 2002-02-05 | 2003-08-15 | Equos Research Co Ltd | 燃料電池システム |
| JP2004187332A (ja) * | 2002-11-29 | 2004-07-02 | Honda Motor Co Ltd | 燃料電池車両の制御装置 |
| JP2006340419A (ja) * | 2005-05-31 | 2006-12-14 | Toshiba Corp | ハイブリッド車両 |
| JP2007318938A (ja) * | 2006-05-26 | 2007-12-06 | Honda Motor Co Ltd | 燃料電池車両の電源システム |
-
2007
- 2007-12-28 JP JP2007341286A patent/JP4844556B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000036308A (ja) * | 1998-07-16 | 2000-02-02 | Toyota Motor Corp | 燃料電池システム |
| JP2003229138A (ja) * | 2002-02-05 | 2003-08-15 | Equos Research Co Ltd | 燃料電池システム |
| JP2004187332A (ja) * | 2002-11-29 | 2004-07-02 | Honda Motor Co Ltd | 燃料電池車両の制御装置 |
| JP2006340419A (ja) * | 2005-05-31 | 2006-12-14 | Toshiba Corp | ハイブリッド車両 |
| JP2007318938A (ja) * | 2006-05-26 | 2007-12-06 | Honda Motor Co Ltd | 燃料電池車両の電源システム |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8996182B2 (en) | 2009-06-08 | 2015-03-31 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and power control method therefor |
| WO2010143247A1 (ja) * | 2009-06-08 | 2010-12-16 | トヨタ自動車株式会社 | 燃料電池システムおよびその電力制御方法 |
| JP2011097669A (ja) * | 2009-10-27 | 2011-05-12 | Ricoh Co Ltd | 充電回路及び充電方法 |
| JP2011205735A (ja) * | 2010-03-24 | 2011-10-13 | Toyota Motor Corp | 燃料電池車両 |
| WO2013001343A2 (en) | 2011-06-28 | 2013-01-03 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and control method therefor |
| US9083266B2 (en) | 2011-06-28 | 2015-07-14 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and control method therefor |
| JP2013062153A (ja) * | 2011-09-14 | 2013-04-04 | Honda Motor Co Ltd | 燃料電池車両 |
| US8557461B2 (en) | 2011-09-14 | 2013-10-15 | Honda Motor Co., Ltd | Fuel cell vehicle |
| JP2013169076A (ja) * | 2012-02-15 | 2013-08-29 | Toyota Motor Corp | 移動体の運転方法及び移動体 |
| JP2013180645A (ja) * | 2012-03-01 | 2013-09-12 | Toyota Motor Corp | 報知装置、車両および報知装置の制御方法 |
| JP2014166104A (ja) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | 電力システム及び燃料電池車両 |
| JP2014166103A (ja) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | 電力システム及び燃料電池車両 |
| JP2015035840A (ja) * | 2013-08-07 | 2015-02-19 | スズキ株式会社 | 燃料電池車両 |
| JP2016010268A (ja) * | 2014-06-25 | 2016-01-18 | 本田技研工業株式会社 | 2電源負荷駆動燃料電池システム及び燃料電池自動車 |
| JP2015038882A (ja) * | 2014-10-20 | 2015-02-26 | トヨタ自動車株式会社 | 燃料電池システム |
| JP2016092893A (ja) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | 燃料電池システムの制御方法及び燃料電池自動車 |
| JP2016091647A (ja) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | 燃料電池システムの制御方法及び燃料電池自動車 |
| JP2016091648A (ja) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | 燃料電池システムの制御方法及び燃料電池自動車 |
| JP2016207435A (ja) * | 2015-04-22 | 2016-12-08 | 株式会社デンソー | 燃料電池車両 |
| JP2017139150A (ja) * | 2016-02-04 | 2017-08-10 | トヨタ自動車株式会社 | 燃料電池システム |
| JP2018121393A (ja) * | 2017-01-23 | 2018-08-02 | 株式会社Subaru | 電動車両の制御装置及び電動車両 |
| US11007893B2 (en) | 2017-01-23 | 2021-05-18 | Subaru Corporation | Control device for electric vehicle and electric vehicle |
| JP2018198213A (ja) * | 2018-07-26 | 2018-12-13 | 株式会社デンソー | 燃料電池車両 |
| JP2021118064A (ja) * | 2020-01-23 | 2021-08-10 | 株式会社豊田自動織機 | 燃料電池システム |
| JP7370880B2 (ja) | 2020-01-23 | 2023-10-30 | 株式会社豊田自動織機 | 燃料電池システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4844556B2 (ja) | 2011-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4844556B2 (ja) | 電力供給システム | |
| KR101229337B1 (ko) | 연료전지시스템 | |
| JP4561827B2 (ja) | 燃料電池システム、及び燃料電池用昇圧コンバータ | |
| KR101143438B1 (ko) | 차량의 전력제어장치 | |
| JP2009165245A (ja) | 燃料電池システム、及びdc−dcコンバータ | |
| JP7096203B2 (ja) | 電源システム | |
| CN108454419B (zh) | 电池系统的控制装置和电池系统 | |
| JP2009254169A (ja) | 電力供給システム | |
| JP2009165243A (ja) | 燃料電池システム | |
| JP6104635B2 (ja) | 電力システム及び燃料電池車両 | |
| JP5390765B2 (ja) | 燃料電池システム | |
| KR20080053864A (ko) | 배터리 시스템이 적용되는 연료전지 슈퍼캡 하이브리드차량 및 이의 동력분배 제어 방법 | |
| JP4930369B2 (ja) | 燃料電池システム | |
| JP2009171735A (ja) | Dc/dcコンバータ装置 | |
| JP4556989B2 (ja) | 燃料電池電源装置 | |
| JP2011259589A (ja) | 車両用電源装置および車両用電源装置の制御方法 | |
| CN110696752B (zh) | 一种纯电动汽车低压电气系统能效提升方法 | |
| JP6054918B2 (ja) | 2電源負荷駆動燃料電池システム及び燃料電池自動車 | |
| JP2009165242A (ja) | 燃料電池システム、及びdc−dcコンバータ | |
| JP2009232548A (ja) | 燃料電池システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110913 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110926 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141021 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4844556 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141021 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |