JP2009178122A - 乗用型田植機 - Google Patents
乗用型田植機 Download PDFInfo
- Publication number
- JP2009178122A JP2009178122A JP2008021694A JP2008021694A JP2009178122A JP 2009178122 A JP2009178122 A JP 2009178122A JP 2008021694 A JP2008021694 A JP 2008021694A JP 2008021694 A JP2008021694 A JP 2008021694A JP 2009178122 A JP2009178122 A JP 2009178122A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- front wheel
- rice transplanter
- operating
- differential mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01C—PLANTING; SOWING; FERTILISING
- A01C11/00—Transplanting machines
- A01C11/02—Transplanting machines for seedlings
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B59/00—Devices specially adapted for connection between animals or tractors and agricultural machines or implements
- A01B59/06—Devices specially adapted for connection between animals or tractors and agricultural machines or implements for machines mounted on tractors
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01C—PLANTING; SOWING; FERTILISING
- A01C11/00—Transplanting machines
- A01C11/006—Other parts or details or planting machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/20—Off-Road Vehicles
- B60Y2200/22—Agricultural vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P60/00—Technologies relating to agriculture, livestock or agroalimentary industries
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Transplanting Machines (AREA)
- Retarders (AREA)
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
Abstract
【解決手段】乗用型田植機において、格納位置Aと作業位置Dとに位置変更可能な操作具60を備え、格納位置Aと作業位置Dとの間に中間位置Cを設定し、中間位置Cと作業位置Dとの間で、前輪デフ機構40がデフロック状態に操作されるように構成する。
【選択図】図12
Description
(構成)
本発明の第1特徴は、乗用型田植機を次のように構成することにある。
(作用)
本発明の第1特徴によると、格納位置と中間位置との間に操作具を位置変更した状態で、前輪デフ機構がデフ作動状態に操作されたままの状態を維持できる。これにより、例えば操作具を用いた畦越え作業の終了後に作業者の不注意等により操作具をきちんと格納せずに操作具が格納位置から前方に位置変更した状態で苗植付作業を行った場合や、操作具を作業者が意図的に格納位置から前方に位置変更した状態で苗植付作業を行った場合等において、作業者が前輪デフ機構をデフロック作動しようとしていないにも関わらず、作業者の意思とは無関係に前輪デフ機構がデフロック作動することを防止できる。
(発明の効果)
本発明の第1特徴によると、操作具により前輪デフ機構をデフロック作動可能に構成することで、畦越え作業時の操作具の操作性を向上しながら、好適に前輪デフ機構をデフロック作動させることができ、苗植付作業の作業性を向上できる。
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の乗用型田植機において、次のように構成することにある。
(作用)
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
(発明の効果)
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
[III]
(構成)
本発明の第3特徴は、本発明の第2特徴の乗用型田植機において、次のように構成することにある。
(作用)
本発明の第3特徴によると、本発明の第2特徴と同様に前項[II]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
(発明の効果)
本発明の第3特徴によると、本発明の第2特徴と同様に前項[II]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
[IV]
(構成)
本発明の第4特徴は、本発明の第1〜第3特徴の乗用型田植機において、次のように構成することにある。
(作用)
本発明の第4特徴によると、本発明の第1〜第3特徴のいずれか一つと同様に前項[I]〜[III]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
(発明の効果)
本発明の第4特徴によると、本発明の第1〜第3特徴のいずれか一つと同様に前項[I]〜[III]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
[V]
(構成)
本発明の第5特徴は、本発明の第1〜第4特徴の乗用型田植機において、次のように構成することにある。
(作用)
本発明の第5特徴によると、本発明の第1〜第4特徴のいずれか一つと同様に前項[I]〜[IV]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
(発明の効果)
本発明の第5特徴によると、本発明の第1〜第4特徴のいずれか一つと同様に前項[I]〜[IV]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
[VI]
(構成)
本発明の第6特徴は、本発明の第1〜第5特徴の乗用型田植機において、次のように構成することにある。
(作用)
本発明の第6特徴によると、本発明の第1〜第5特徴のいずれか一つと同様に前項[I]〜[V]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
(発明の効果)
本発明の第6特徴によると、本発明の第1〜第5特徴のいずれか一つと同様に前項[I]〜[V]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
図1〜図3に基づいて乗用型田植機の全体構成について説明する。図1は、乗用型田植機の全体側面図であり、図2は、乗用型田植機の全体平面図であり、図3は、乗用型田植機の全体正面図である。
[乗用型田植機の伝動構造]
図1〜図6に基づいて乗用型田植機の伝動構造について説明する。図4は、乗用型田植機前部の側面図であり、図5は、ブレーキペダル27の連係構造を説明する概略平面図であり、図6は、ミッションケース20の断面図である。
[操作アームの詳細構造]
図1,図2,図4,図7〜図11に基づいて機体前方から人為的に操作可能な操作アーム60(操作具に相当)の詳細構造について説明する。図7は、操作アーム60の連係構造を説明する縦断側面図であり、図8は、操作アーム60の連係構造を説明する横断平面図である。図9は、格納位置での操作アーム60の基端部付近の詳細側面図であり、図10は、作業位置での操作アーム60の基端部付近の詳細側面図である。図11は、アーム部材70付近の平面図である。
左のブラケット60aの後部下部には、フック60bが固定されており、このフック60bに第1連係ロッド62の一端部(前端部)が連係されている。メインフレーム55の前後中央部における上部には、中間支軸63が固定されており、この中間支軸63に中間アーム64が左右向きの軸心P2周りで回動自在に支持されている。
[操作具の操作状況]
図12及び図13に基づいて操作アーム60の操作状況について説明する。図12は、操作アーム60の操作状況について説明する操作アーム60付近の側面図であり、図13は、操作アーム60の使用状況について説明する乗用型田植機の概略側面図である。
[機体停止スイッチの構造及び電気回路]
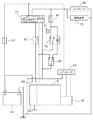
図1〜図3,図14に基づいて操作アーム60に装備されている機体停止スイッチ80の構造及び電気回路について説明する。図14は、乗用型田植機の電気回路図である。なお、図14は、バッテリー81からの電力がコントローラ85等に供給されており、機体停止スイッチ80が押し操作されていない状態を示す。
[発明の実施の第1別形態]
前述の[発明を実施するための最良の形態]においては、中間位置Cから作業位置Dまでの間の第2所定角度βの範囲で、前輪デフ機構40がデフロック状態となるに設定した例を示したが、第2所定角度βを異なる角度に設定してもよく、例えば、第2所定角度βを第1所定角度αと略同じ角度に設定してもよく、第2所定角度βを第1所定角度αより大きい角度に設定してもよい。また、例えば中間アーム64の長穴部64Aの範囲Wを変更調節できるようにする等して、第2所定角度βを変更調節できるように構成してもよい。
[発明の実施の第2別形態]
前述の[発明を実施するための最良の形態]、及び[発明の実施の第1別形態]においては、中間アーム64の長穴部64A及び弾性バネ67の圧縮によって、操作アーム60が格納位置Aから第1所定角度α揺動する範囲において、前輪デフ機構40がデフロック状態にならないように構成した例を示したが、中間アーム64の長穴部64A及び弾性バネ67の圧縮のいずれか一方によって、前輪デフ機構40がデフロック状態にならないように構成してもよい。
[発明の実施の第3別形態]
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]、及び[発明の実施の第2別形態]においては、操作軸43と操作アーム60をリンク機構により機械的に連係した例を示したが、操作軸43と操作アーム60を機械的に連係する構造として異なる構造を採用してもよく、例えば連係ロッドや連係ワイヤ(プッシュプルワイヤを含む)等(図示せず)を採用してもよく、例えばリンク機構、連係ロッド、連係ワイヤ(プッシュプルワイヤを含む)の組み合わせ(図示せず)を採用してもよい。
[発明の実施の第4別形態]
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]、及び[発明の実施の第2別形態]、及び[発明の実施の第3別形態]においては、操作軸43と操作アーム60を機械的に連係した例を示したが、操作軸43と操作アーム60を電気的に連係する構成を採用してもよい。
[発明の実施の第5別形態]
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]、[発明の実施の第2別形態]、[発明の実施の第3別形態]、及び[発明の実施の第4別形態]においては、格納位置Aと作業位置Dとの間の操作アーム60の揺動範囲の一部で、前輪デフ機構40がデフロック状態に操作されるように構成した例を示したが、格納位置Aと作業位置Dとの間の操作アーム60の揺動範囲の一部で、ブレーキ装置19又は主クラッチ26が作動するように構成してもよい。この場合、前輪デフ機構40がデフロック状態に操作されると共に、ブレーキ装置19又は主クラッチ26が作動するように構成してもよい。以下、操作アーム60の揺動操作に連動してブレーキ装置19又は主クラッチ26が作動するように構成した場合の一例を具体的に説明する。
[発明の実施の第6別形態]
前述の[発明を実施するための最良の形態]、[発明の実施の第1別形態]、[発明の実施の第2別形態]、[発明の実施の第3別形態]、[発明の実施の第4別形態]、及び[発明の実施の第5別形態]においては、操作具の一例として操作アーム60を例に示したが、同様の機能を果たすものであれば操作具として異なる構成を採用してもよく、例えば操作ハンドル(図示せず)や操作レバー(図示せず)を採用してもよい。また、例えば、ハンドルHを前方に揺動させて地上から操作可能に構成した操作具(図示せず)においても同様に適用できる。
13 フロア
40 前輪デフ機構
44 デフロックペダル(デフロック操作具)
60 操作アーム(操作具)
60C センターマスコット(照準部材)
70A 第1長穴(阻止手段)
80 機体停止スイッチ
A 格納位置
C 中間位置
D 作業位置
Claims (6)
- 機体の前部に格納した格納位置と、前記格納位置から前方に移動し地上から操作可能な作業位置とに位置変更可能な操作具を備え、
前記格納位置と前記作業位置との間に中間位置を設定し、前記中間位置と前記作業位置との間で、前輪デフ機構がデフロック状態に操作されるように構成してある乗用型田植機。 - 前記操作具とは別のデフロック操作具を運転部のフロアに備え、前記デフロック操作具により前記前輪デフ機構がデフロック状態に操作されるように構成してある請求項1記載の乗用型田植機。
- 前記デフロック操作具の動作が前記操作具側に伝達されるのを阻止する阻止手段を備えてある請求項2記載の乗用型田植機。
- 前記操作具に、植付走行時の照準となる照準部材を備えてある請求項1〜3のいずれか一項に記載の乗用型田植機。
- 前記操作具に、機体を停止させる機体停止スイッチを備えてある請求項1〜4のいずれか一項に記載の乗用型田植機。
- 地上から前記作業位置における操作具を下方に向けて押圧することにより、前記操作具を介して機体の前部を押し下げ操作可能に構成してある請求項1〜5のいずれか一項に記載の乗用型田植機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008021694A JP5285286B2 (ja) | 2008-01-31 | 2008-01-31 | 乗用型田植機 |
| KR1020090007210A KR101114734B1 (ko) | 2008-01-31 | 2009-01-30 | 승용형 이앙기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008021694A JP5285286B2 (ja) | 2008-01-31 | 2008-01-31 | 乗用型田植機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009178122A true JP2009178122A (ja) | 2009-08-13 |
| JP2009178122A5 JP2009178122A5 (ja) | 2011-05-19 |
| JP5285286B2 JP5285286B2 (ja) | 2013-09-11 |
Family
ID=41032588
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008021694A Active JP5285286B2 (ja) | 2008-01-31 | 2008-01-31 | 乗用型田植機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5285286B2 (ja) |
| KR (1) | KR101114734B1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011160694A (ja) * | 2010-02-08 | 2011-08-25 | Mitsubishi Agricultural Machinery Co Ltd | 乗用型田植機における車外操作具の連係機構 |
| USRE43805E1 (en) | 2004-10-18 | 2012-11-20 | Mitsubishi Electric Corporation | Refrigeration/air conditioning equipment |
| JP2013063021A (ja) * | 2011-09-15 | 2013-04-11 | Kubota Corp | 乗用型作業車 |
| US8899058B2 (en) | 2006-03-27 | 2014-12-02 | Mitsubishi Electric Corporation | Air conditioner heat pump with injection circuit and automatic control thereof |
| JP2015188398A (ja) * | 2014-03-28 | 2015-11-02 | 株式会社クボタ | 乗用型田植機 |
| JP2020127386A (ja) * | 2019-02-08 | 2020-08-27 | 株式会社クボタ | 水田作業機 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102166793B1 (ko) * | 2020-06-05 | 2020-10-16 | 주식회사 그린모빌리티 | 차동 잠금 장치를 구비한 농업용 전기차 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60150148U (ja) * | 1984-03-19 | 1985-10-05 | 株式会社クボタ | 不整地型運搬車の運転部 |
| JPS61163023A (ja) * | 1985-01-11 | 1986-07-23 | Iseki & Co Ltd | 乗用走行車におけるデフロツク装置 |
| JP2000335453A (ja) * | 1999-05-31 | 2000-12-05 | Iseki & Co Ltd | 農作業機 |
| JP2002079845A (ja) * | 2000-09-08 | 2002-03-19 | Tcm Corp | アクセル制御装置 |
| JP2004121125A (ja) * | 2002-10-03 | 2004-04-22 | Yanmar Agricult Equip Co Ltd | 乗用田植機 |
| JP2006068017A (ja) * | 2005-09-20 | 2006-03-16 | Iseki & Co Ltd | 農業作業車 |
| JP2006081454A (ja) * | 2004-09-15 | 2006-03-30 | Yanmar Co Ltd | 乗用田植機 |
| JP2006345764A (ja) * | 2005-06-15 | 2006-12-28 | Yanmar Co Ltd | 乗用型田植機 |
| JP2007326572A (ja) * | 2007-07-09 | 2007-12-20 | Kubota Corp | 乗用水田作業機 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09109917A (ja) * | 1995-10-23 | 1997-04-28 | Seirei Ind Co Ltd | 乗用作業車 |
| JP2005096577A (ja) | 2003-09-24 | 2005-04-14 | Iseki & Co Ltd | 乗用作業機の操作装置 |
| JP4362357B2 (ja) | 2003-12-16 | 2009-11-11 | ヤンマー株式会社 | 乗用田植機 |
-
2008
- 2008-01-31 JP JP2008021694A patent/JP5285286B2/ja active Active
-
2009
- 2009-01-30 KR KR1020090007210A patent/KR101114734B1/ko active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60150148U (ja) * | 1984-03-19 | 1985-10-05 | 株式会社クボタ | 不整地型運搬車の運転部 |
| JPS61163023A (ja) * | 1985-01-11 | 1986-07-23 | Iseki & Co Ltd | 乗用走行車におけるデフロツク装置 |
| JP2000335453A (ja) * | 1999-05-31 | 2000-12-05 | Iseki & Co Ltd | 農作業機 |
| JP2002079845A (ja) * | 2000-09-08 | 2002-03-19 | Tcm Corp | アクセル制御装置 |
| JP2004121125A (ja) * | 2002-10-03 | 2004-04-22 | Yanmar Agricult Equip Co Ltd | 乗用田植機 |
| JP2006081454A (ja) * | 2004-09-15 | 2006-03-30 | Yanmar Co Ltd | 乗用田植機 |
| JP2006345764A (ja) * | 2005-06-15 | 2006-12-28 | Yanmar Co Ltd | 乗用型田植機 |
| JP2006068017A (ja) * | 2005-09-20 | 2006-03-16 | Iseki & Co Ltd | 農業作業車 |
| JP2007326572A (ja) * | 2007-07-09 | 2007-12-20 | Kubota Corp | 乗用水田作業機 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE43805E1 (en) | 2004-10-18 | 2012-11-20 | Mitsubishi Electric Corporation | Refrigeration/air conditioning equipment |
| USRE43998E1 (en) | 2004-10-18 | 2013-02-19 | Mitsubishi Electric Corporation | Refrigeration/air conditioning equipment |
| US8899058B2 (en) | 2006-03-27 | 2014-12-02 | Mitsubishi Electric Corporation | Air conditioner heat pump with injection circuit and automatic control thereof |
| JP2011160694A (ja) * | 2010-02-08 | 2011-08-25 | Mitsubishi Agricultural Machinery Co Ltd | 乗用型田植機における車外操作具の連係機構 |
| JP2013063021A (ja) * | 2011-09-15 | 2013-04-11 | Kubota Corp | 乗用型作業車 |
| JP2015188398A (ja) * | 2014-03-28 | 2015-11-02 | 株式会社クボタ | 乗用型田植機 |
| JP2020127386A (ja) * | 2019-02-08 | 2020-08-27 | 株式会社クボタ | 水田作業機 |
| JP7126460B2 (ja) | 2019-02-08 | 2022-08-26 | 株式会社クボタ | 水田作業機 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101114734B1 (ko) | 2012-02-29 |
| KR20090084725A (ko) | 2009-08-05 |
| JP5285286B2 (ja) | 2013-09-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5285286B2 (ja) | 乗用型田植機 | |
| JP5682816B2 (ja) | 乗用草刈機 | |
| JP3722081B2 (ja) | 作業車両 | |
| JP4271923B2 (ja) | 乗用田植機 | |
| JP2008063969A (ja) | 作業車両 | |
| JP4580167B2 (ja) | 乗用型作業車 | |
| JP2000313366A (ja) | 乗用型作業車 | |
| JP2010132037A (ja) | 作業車の走行操作装置 | |
| JP2005186782A5 (ja) | ||
| JP4616705B2 (ja) | 乗用型田植機 | |
| JP4154824B2 (ja) | 苗植機 | |
| JP2008195271A (ja) | トラクタ | |
| JP2007313953A (ja) | 作業車両 | |
| JP4488518B2 (ja) | 乗用型田植機 | |
| JP2002274342A (ja) | 乗用作業機 | |
| JP2006081454A (ja) | 乗用田植機 | |
| JP2004248560A (ja) | 乗用型田植機の予備苗のせ台構造 | |
| JP2005104299A (ja) | 農作業機 | |
| JP4626147B2 (ja) | 田植機 | |
| JP4705409B2 (ja) | 移植機における前押え操作具 | |
| JP4797382B2 (ja) | 作業車両の変速調節装置 | |
| JP2003118625A (ja) | 作業車の操作構造 | |
| JP4524849B2 (ja) | 乗用型田植機 | |
| JP2005176668A (ja) | 乗用田植機 | |
| JP2005185179A (ja) | 乗用型田植機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110126 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110329 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120315 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120511 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121004 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130502 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130531 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5285286 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |