JP2009255192A - マニュピュレーション装置及びその制御方法 - Google Patents
マニュピュレーション装置及びその制御方法 Download PDFInfo
- Publication number
- JP2009255192A JP2009255192A JP2008104302A JP2008104302A JP2009255192A JP 2009255192 A JP2009255192 A JP 2009255192A JP 2008104302 A JP2008104302 A JP 2008104302A JP 2008104302 A JP2008104302 A JP 2008104302A JP 2009255192 A JP2009255192 A JP 2009255192A
- Authority
- JP
- Japan
- Prior art keywords
- link
- rotation angle
- luminance
- link mechanism
- brightness
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Manipulator (AREA)
Abstract
【課題】リンク機構にセンサを取り付けることなく、低コストで小型可能であり、検出演算量が少なくて済むマニュピュレーション装置を得る。
【解決手段】ステップS1で撮像部によりワーク及びリンク機構の画像を取り込み、取り込んだ画像はステップS2とステップS3に送られる。ステップS2はワークの位置や姿勢を検出する。ステップS3〜S10において、リンクの角度で輝度が変化する偏光板8a〜8fの画像を取り込み、各リンクの回転角を検出する。既知の輝度変化位置とリンク回転角から、随時に輝度変化位置とリンク回転角を求めて、各リンクの角度、即ちリンク機構の状態を求める。ステップS11はリンク機構の状態とワークの位置、姿勢から、相対関係を演算する相対位置を検出する。ステップS12は各リンクの角度制御量を演算するための制御量を演算し、アクチュエータによりリンク機構を制御する。
【選択図】図5
【解決手段】ステップS1で撮像部によりワーク及びリンク機構の画像を取り込み、取り込んだ画像はステップS2とステップS3に送られる。ステップS2はワークの位置や姿勢を検出する。ステップS3〜S10において、リンクの角度で輝度が変化する偏光板8a〜8fの画像を取り込み、各リンクの回転角を検出する。既知の輝度変化位置とリンク回転角から、随時に輝度変化位置とリンク回転角を求めて、各リンクの角度、即ちリンク機構の状態を求める。ステップS11はリンク機構の状態とワークの位置、姿勢から、相対関係を演算する相対位置を検出する。ステップS12は各リンクの角度制御量を演算するための制御量を演算し、アクチュエータによりリンク機構を制御する。
【選択図】図5
Description
本発明は、工業製品の組立て、把持、搬送等の作業を行うロボットアームやロボットハンド等のマニュピュレーション装置及びその制御方法に関するものである。特に、作業対象のワークやマニュピュレータをビデオカメラ等で撮像し、その画像を基に制御するビジュアルフィードバック手段に適用可能として、処理の高速化を図るものである。
従来から、マニュピュレーション機構の制御は直接或いは間接的に角度センサを設け、その角度センサの値と指令値の差が小さくなるように制御している。それぞれに用いられる角度センサとしては、ロータリエンコーダ、ポテンショメータ、レゾルバ等が用いられている。
また、特許文献1においては、ロボットアームにターゲットとしてマーカを設ける方法が開示されている。ロボット本体の各軸アームに、例えば同心円から成るマーカを設けると共に、各軸のマーカ部分を撮像するためのCCDカメラを設け、その画像データから各マーカの位置を検出する視覚認識装置が知られている。
しかし、ロータリエンコーダ等の角度センサをマニュピュレーション装置のリンク機構に取り付ける上述の従来例においては、角度センサ自体と周辺回路が必要になり、コストが高くなる。また、相対角度のみを出力するロータリエンコーダでは原点センサが必要であり、更に原点センサを取り付けるための場所を必要とするために、マニュピュレーション装置の小型化のためにはセンサレス化が望まれている。
また、特許文献1に示されている方法においては、一般にマーカを画像視認装置で検出するために、テンプレートマッチング等の演算が必要となる。この演算は繰り返し演算が多く、結果として膨大な演算量となる。従って、高速でマーカの位置を探索するには、高速なハードウエアが必要となり、装置自体の価格が高くなる。
本発明の目的は、上述の問題点を解消し、リンク機構に角度センサを取り付けることなく、低コストで小型可能であり、検出演算量が少なくて済むマニュピュレーション装置及びその制御方法を提供することにある。
上記目的を達成するための本発明に係るマニュピュレーション装置は、ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、前記リンク機構の回転角に応じて前記リンク機構を構成する部材からの反射光の輝度を変化させる輝度変化手段と、前記撮像手段の出力から前記輝度変化手段による輝度変化を抽出する輝度変化抽出手段と、該輝度変化抽出手段により抽出した前記輝度変化を基に前記リンク回転角を検出するリンク回転角検出手段と、該リンク回転角検出手段により得られた結果により前記リンク機構を駆動してそのリンク回転角を制御する制御手段とを備えたことを特徴とする。
また、本発明に係るマニュピュレーション装置は、ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、前記リンク機構の回転角に応じて前記リンク機構を構成する部材からの反射光の輝度を変化させる輝度変化手段と、該輝度変化手段の近傍に基準輝度を発生する手段を配置した基準輝度発生手段と、前記撮像手段の出力から前記輝度変化手段による輝度変化を抽出する輝度変化抽出手段と、前記撮像手段の出力から前記基準輝度発生手段による前記基準輝度を抽出する基準輝度抽出手段と、抽出された前記輝度変化と前記基準輝度との割合から前記リンク回転角を検出するリンク回転角検出手段と、該リンク回転角検出手段の結果により前記リンク機構を駆動してそのリンク回転角を制御する制御手段とを有することを特徴とする。
更に、本発明に係るマニュピュレーション装置は、ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、リンク回転角に応じて前記リンク機構を構成する第1リンクからの反射光の第1の輝度を変化させる第1の輝度変化手段と、該第1の輝度変化手段の近傍で前記リンク回転角に応じて前記リンク機構を構成する第2リンクからの反射光の第2の輝度を変化させる第2の輝度変化手段と、前記撮像手段の出力から前記第1、第2の輝度変化手段による前記第1、第2の輝度変化を抽出する輝度変化抽出手段と、前記第1の輝度と前記第2の輝度の割合から前記リンク回転角を求めるリンク回転角検出手段と、該リンク回転角検出手段の結果により前記リンク機構を駆動してそのリンク回転角を制御する制御手段を有することを特徴とする。
本発明に係るマニュピュレーション装置の制御方法は、ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、前記リンク機構の回転角に応じて前記リンク機構を構成する部材からの反射光の輝度を変化させる輝度変化工程と、該輝度変化工程による輝度変化を前記撮像手段により撮像する撮像工程と、該撮像工程の出力から前記輝度変化を抽出する輝度変化抽出工程と、抽出した前記輝度変化を基に前記リンク回転角を検出するリンク回転角検出工程と、該リンク回転角検出工程による結果によって前記リンク機構を駆動し前記リンク回転角を制御する制御工程とを有することを特徴とする。
本発明に係るマニュピュレーション装置及びその制御方法によれば、リンク機構のリンク回転角を検出するのに角度センサを取り付けることなく構成できるため、低コストで小型化し易い。また、テンプレートマッチングのみの角度検出に比べて、演算量が少なく高速にリンク回転角の検出が可能となる。
本発明を図示の実施例に基づいて詳細に説明する。
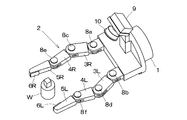
図1は実施例1の基本構成のロボットアームに取り付けたロボットハンド機構の斜視図であり、対象物体であるワークWを把持する前の状態である。図2は側面図、図3はワークWを把持した状態の斜視図である。なお、説明の都合上、ハンド機構は対称形状で、それぞれ3リンク構成として説明するが、対称形状やリンクの数の制限はない。
なお、ロボットアームは市販の汎用品等が知られており、ハンド機構の位置や姿勢制御が可能であればよく、ロボットアーム自体の説明は割愛する。ロボットアームに接続されたハンド筐体1には一対のリンク機構2が設けられている。ハンド筐体1側から、第1リンク3R、3L、第2リンク4R、4L、第3リンク5R、5L、接触部6R、6Lが、順次に回転軸7a〜7fを介して回動自在に設けられ、各リンクはモータや歯車等の公知技術の機構で駆動される。そして、各回転軸7a〜7fの上部に、偏光板8a〜8fが取り付けられ、各偏光板8a〜8fの偏光方向は所定方向に配列されている。
ワークWはこのロボットアームの把持対象であり、ハンド筐体1はアクチュエータやその電気基板等を収納している。また、ハンド筐体1にはワークWとリンク機構2を撮像するカメラ9が構設され、カメラ9のレンズの前面には偏光板10が取り付けられている。
図4はシステムのブロック回路構成図である。カメラ9や偏光板10、画像キャプチャ手段等から成る撮像部11の出力は、画像を把持制御のための情報に変換する画像処理部12に接続されている。画像処理部12は輝度変化抽出部13、輝度角度変換部14、ワーク検出部15から構成され、輝度変化抽出部13の出力は輝度角度変換部14を経て、リンク制御演算部16を介して各リンクを駆動するアクチュエータ17に接続されている。そして、アクチュエータ17により駆動されたリンク機構2の状態はカメラ9を介して撮像部11により検出されるようになっている。
輝度変化抽出部13は撮像部11の出力から偏光板8a〜8fからの反射光の輝度値を得るためのものであり、輝度角度変換部14は輝度変化抽出部13で得られた輝度値を所定の割合で回転角度に変換する。ワーク検出部15は把持対象であるワークWの位置や姿勢を検出するが、ワークWの姿勢や位置が既知であれば不要である。
リンク制御演算部16は第1リンク3R、3L〜第3リンク5R、5Lの指令角度とリンク回転角を比較して制御量を求め、ワークWの大きさや位置により指令角度は異なる。アクチュエータ17は第1リンク3R、3L〜第3リンク5R、5Lを駆動するためのモータなどで構成され、第1リンク3R、3L〜第3リンク5R、5Lはアクチュエータ17により制御され、これによりワークWへ所定の操作を行う。リンク機構2の動作は撮像部11で撮像され、これによってビジュアルフィードバックによるループ制御が構成されている。
一般に、偏光板を経た反射光は偏光特性を有し、その偏光方向に対して偏光板を直交させると光が遮断され、同じ偏光方向に偏光板を配置すると透過する。直交と同じ方向の中間は角度に応じて光が透過する。偏光板を通して、所定の部材に偏光板を貼り付けた場合は角度に応じた輝度変化として観察できる。
本実施例では、撮像手段であるカメラ9のレンズの前と回転軸7a〜7fとに偏光板10、8を配置し、リンク機構2の機械的な回転による輝度変化を利用して検出している。
図5は本装置の動作と処理のフローチャート図である。ステップS1はカメラ9等で構成される撮像部11で、ワークW及びリンク機構の画像を取り込む。ステップS1で取り込んだ画像はステップS2とステップS3に送られる。ステップS2はワークWの相対位置や姿勢を検出し、ワークWの位置や姿勢が既知の場合は省略される。ステップS3は角度で輝度が変化する第1の輝度変化部の偏光板8a、8bの画像として第1の輝度変化画像を取り込む。
撮像部11で得られる画像での偏光板8a、8bの偏光方向は、装置構成上で一意的に決まり既知であるため、偏光板8a、8bの位置に対応する画素の輝度値を読み込めばよい。この場合の輝度値は複数の画素の平均でもよいし、1つの画素の輝度値を代表させてもよい。この偏光板8a、8bの位置は第1リンク3R、3Lの輝度変化位置となる。ステップS4はステップS3で得た輝度値を基に、第1リンク3R、3Lの角度を演算し、第1リンク3R、3Lの回転角を検出する。
ステップS5は既知である第1リンク3R、3Lの長さと前述の第1リンク回転角より、三角関数によって偏光板8c、8dの位置を推定する第2リンク4R、4Lの輝度変化位置検出ステップである。ステップS6は偏光板8c、8dに対してステップS3と同様の動作を行い第2の輝度変化画像を取り込む。ステップS7は第2リンク4R、4Lに対してステップS4と同様の動作を行い、第2リンク4R、4Lの回転角を検出する。
ステップS8は第2リンク4R、4Lの回転角から偏光板8e、8fの位置を推定し、ステップS5と同様の第2の輝度変化位置を検出する。ステップS9は偏光板8e、8fの画像を取り込むステップS3とステップS6と同様に画像を取り込む。ステップS10は第3リンク5R、5Lの角度を求めるステップS5とステップS7と同様に第3リンク5R、5Lの回転角を検出する。ステップS1〜ステップS10に示すように、角度に応じて輝度変化を生ずる部位を撮像し、その輝度からリンク機構2のリンク回転角を求める。
更に、既知の輝度変化位置とリンク回転角から、随時に輝度変化位置とリンク回転角を求めて、各リンクの角度、即ちリンク機構2の状態を知ることができる。ステップS11は前述のリンク機構2の状態とステップS2のワークWの位置姿勢状態検出で得られた値から、相対関係を演算する相対位置を検出する。ステップS12は各リンクの角度制御量を演算するための制御量を演算する。
ステップS13は前述の制御を基に、リンク機構2の制御を行うアクチュエータ17を制御する。ステップS13で回転駆動したロボットアームの状態をステップS1で画像を取り込むステップに戻すことにより制御ループを構成する。ステップS11〜ステップS13に示すように、ワークWとリンクで構成される把持機構の相対位置の差を演算し、その差が小さくなるように各リンクを制御し、結果として把持制御等が可能となる。
また偏光板8、10を用いた場合に、リンク回転角が90°以上になると、リンク回転角と輝度の関係が一意的に決まらず制御上好ましくない。このため、リンク回転角が90°未満になるように角度制限手段が設けられている。
上述の説明では、偏光角の変化を用いて輝度変化を発生させたが、偏光板による方法以外でもよく、例えば発光体と回転角に応じて開口の大きさが変化する機構をリンク回転軸に設け、開口領域の平均輝度の変化を検出する方法でもよい。なお、偏光板8a〜8fを上述したようにリンク回転軸7a〜7f上に設けずに、歯車等の減速機を介した軸に設けてもよい。
このように、リンク回転角に応じて画像輝度が変化する手段と、その輝度変化を検出しリンク回転角に変換し制御する手段を説明したが、この方法を用いることで、各リンクの角度センサや原点センサが不要になり低コストとなる。また、通常のテンプレートマッチングに比べて高速な角度検出が可能となる。これらの処理の工程は、接続されたコンピュータや電子基板に組み込まれたマイクロコンピュータ等の演算制御装置のプログラムとして実行される。
実施例1では、リンク回転角を輝度変化として画像上で捉らえ、それを処理してリンク機構2にフィードバックするビジュアルフィードバック系について述べた。しかし実施例1では、照明の強さや環境が変わると、これに応じて反射光の輝度値が変化するので、検出されるリンク回転角が変動する。
この実施例2では、実施例1で述べたリンク回転角検出において、照明変動の影響を受けないリンク回転角検出手段が用いられている。
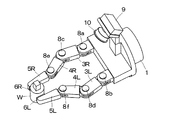
図6は実施例2の基本構成の斜視図である。各回転軸に配置された偏光板8a〜8fの近傍に基準輝度発生手段である基準輝度板21a〜21fが配置されており、この基準輝度板21a〜21fは偏光特性を持っていない。
図7は実施例2のブロック回路構成図であり、画像処理部12には新たに基準輝度抽出部22が設けられている。輝度変化抽出部13は図6に示す偏光板8a〜8fの輝度を検出し、基準輝度抽出部22は基準輝度板21a〜21fが発生する基準輝度を検出する。なお、基準輝度板21a〜21fは偏光特性を持たないので、リンク回転角が変化しても輝度変化は生じない。
輝度角度変換部14は輝度変化抽出部13と基準輝度抽出部22の輝度値からリンク回転角を演算する。輝度角度変換部14では、例えば偏光板8a、基準輝度板21aのように対となった偏光板8と基準輝度板21の輝度割合を求める。予め、この割合とリンク回転角の対応を求めておき、比較することで照明強度が変動しても偏光板8a〜8fによるリンク回転角の検出が安定して得られる。
このように、リンク回転角検出用の輝度変化要素の近傍に基準輝度板21a〜21fを配置して、その輝度を比較演算することで照明変動に強いリンク回転角検出が可能となる。なお、実施例2の輝度変化抽出部13は偏光板に限ることはなく、実施例1で記載したような他の方式でも支障はない。
実施例2では基準輝度板21を設け、その基準輝度を基にリンク回転角を求める手段について説明した。実施例3では特に偏光板の特性を利用し、照明変動に強いリンク回転角検出手段が設けられ、異なる偏光特性を対で構成し、輝度割合からリンク回転角を検出する。
図8は実施例3の基本構成の斜視図であり、偏光板31a〜31fは偏光板8a〜8fの近傍に対で配置されている。これらの偏光板の対はそれぞれ偏光方向が異なる対で構成され、例えば偏光板31aと8aの偏光方向は直交して配置されている。
図9は実施例3のブロック回路構成図であり、画像処理部12は第1輝度変化抽出部32、第2輝度変化抽出部33、輝度角度変換部14、ワーク検出部15から構成されている。第1輝度変化抽出部32、第2輝度変化抽出部33の出力は輝度角度変換部14に接続され、輝度角度変換部14の出力はリンク制御演算部16、アクチュエータ17に接続されている。
第1輝度変化抽出部32は図8で示した偏光板8a〜8fの輝度を検出し、第2輝度変化抽出部33は偏光板31a〜31fの輝度を検出する。輝度角度変換部14は第1輝度変化抽出部32と第2輝度変化抽出部33の輝度値からリンク回転角を演算する。輝度角度変換部14では、例えば偏光板31a、8aの輝度のような対の輝度比を求める。予め、この輝度比とリンク回転角の対応を求めておき、比較することで照明が変動してもリンク回転角の検出が一定となる。
このように、リンク回転角検出用に偏光方向が異なる対の偏光板を設け、その輝度比を求めることで照明変動に強いリンク回転角検出が可能となる。
実施例1〜3では、リンク回転角を画像輝度で求めてリンク機構2の制御を行う形態について述べたが、この考え方はロボットアームや多関節アームに適用できる。しかし、ロボットアームなどリンク長が長くなると、リンク回転角とアーム長のみを参照する手段では、ワークWと把持部の相対精度が悪化する。また、リンクの数が多くなると、それぞれの誤差が累積されて、ワークWと接触部6R、6Lの相対精度が悪化する。本実施例4では、テンプレートマッチングを選択的に使用することで、精度の良い把持制御を行っている。
図10は実施例4の基本構成の斜視図であり、各リンク3R、3L〜5R、5Lにはマーカ41a〜41fが設けられ、マーカ41a〜41fの画像からテンプレートマッチングでリンク位置と角度を検出するようになっている。
図11は実施例4のブロック回路構成図であり、画像処理部12は輝度変化抽出部13、輝度角度変換部14、探索範囲限定部42、マーカ探索部43、リンク回転角更新部44から構成されている。輝度変化抽出部13の出力は輝度角度変換部14、探索範囲限定部42、マーカ探索部43を経てリンク回転角更新部44に接続されている。また、リンク回転角更新部44の出力はリンク制御演算部16、アクチュエータ17に接続されている。
輝度変化抽出部13は偏光板8a〜8fの輝度を検出し、輝度角度変換部14は輝度をリンク回転角に変換する。探索範囲限定部42は輝度角度変換部14の結果からマーカ位置を推定し、その推定位置の近傍をテンプレートマッチングで探索する。この探索範囲限定部42の結果の範囲でマーカの探索をマーカ探索部43によりマーカ41a〜41fに対して行う。
探索範囲を限定することで、テンプレートマッチングに必要な時間を大幅に短縮でき、リンク回転角更新部44はマーカ探索部43の結果からリンク回転角を更新する。テンプレートマッチングはカメラ解像度を高解像とすることで、精度の向上が容易に実現でき、画素単位以下のサブ画素処理が可能なため高精度な検出が可能となる。
このように、探索範囲限定部42でマーカ探索位置を限定し、限定した範囲内のテンプレートマッチングでマーカ41a〜41fを探す形態としたので、テンプレートマッチングの探索時間を大幅に短縮できる。また、同時にワークWに対する高精度な把持制御が可能となる。
本発明はビデオカメラ等の撮像手段を備えた産業ロボットでの部品の搬送や把持等の組立て作業に適応でき、特にビジュアルフィードバックで高速なマニュピュレーション作業が必要な機器に有効である。
1 ハンド筐体
2 リンク機構
3R、3L 第1リンク
4R、4L 第2リンク
5R、5L 第3リンク
6R、6L 接触部
7a〜7f 回転軸
8a〜8f、10、31a〜31f 偏光板
9 カメラ
11 撮像部
12 画像処理部
13、32、33 輝度変化抽出部
14 輝度角度変換部
15 ワーク検出部
16 リンク制御演算部
17 アクチュエータ
21a〜21f 基準輝度板
22 基準輝度抽出部
41a〜41f マーカ
42 探索範囲限定部
43 マーカ探索部
44 リンク回転角更新部
W ワーク
2 リンク機構
3R、3L 第1リンク
4R、4L 第2リンク
5R、5L 第3リンク
6R、6L 接触部
7a〜7f 回転軸
8a〜8f、10、31a〜31f 偏光板
9 カメラ
11 撮像部
12 画像処理部
13、32、33 輝度変化抽出部
14 輝度角度変換部
15 ワーク検出部
16 リンク制御演算部
17 アクチュエータ
21a〜21f 基準輝度板
22 基準輝度抽出部
41a〜41f マーカ
42 探索範囲限定部
43 マーカ探索部
44 リンク回転角更新部
W ワーク
Claims (13)
- ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、前記リンク機構の回転角に応じて前記リンク機構を構成する部材からの反射光の輝度を変化させる輝度変化手段と、前記撮像手段の出力から前記輝度変化手段による輝度変化を抽出する輝度変化抽出手段と、該輝度変化抽出手段により抽出した前記輝度変化を基に前記リンク回転角を検出するリンク回転角検出手段と、該リンク回転角検出手段により得られた結果により前記リンク機構を駆動してそのリンク回転角を制御する制御手段とを備えたことを特徴とするマニュピュレーション装置。
- 前記撮像手段から前記ワークの位置、姿勢を検出するワーク検出手段と、前記ワークと前記リンク機構との相対位置を検出する検出手段とを備えたことを特徴とする請求項1に記載のマニュピュレーション装置。
- 前記リンク回転軸と前記撮像手段とはそれぞれ偏光板を有し、前記輝度変化抽出手段は前記偏光板を介して前記輝度変化を検出することを特徴とする請求項1のマニュピュレーション装置。
- 前記リンク回転軸に設けた前記偏光板は減速手段を介して設けたことを特徴とする請求項3に記載のマニュピュレーション装置。
- 前記リンク機構に対し角度制限手段を設け、前記リンク回転角が90°未満となるようにしたことを特徴とする請求項1〜4の何れか1つの請求項に記載のマニュピュレーション装置。
- ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、前記リンク機構の回転角に応じて前記リンク機構を構成する部材からの反射光の輝度を変化させる輝度変化手段と、該輝度変化手段の近傍に基準輝度を発生する手段を配置した基準輝度発生手段と、前記撮像手段の出力から前記輝度変化手段による輝度変化を抽出する輝度変化抽出手段と、前記撮像手段の出力から前記基準輝度発生手段による前記基準輝度を抽出する基準輝度抽出手段と、抽出された前記輝度変化と前記基準輝度との割合から前記リンク回転角を検出するリンク回転角検出手段と、該リンク回転角検出手段の結果により前記リンク機構を駆動してそのリンク回転角を制御する制御手段とを有することを特徴とするマニュピュレーション装置。
- 前記基準輝度発生手段は偏光特性を持たない部材から成り、前記リンク回転軸と前記撮像手段とはそれぞれ偏光板を有し、前記輝度変化抽出手段は前記偏光板を介して前記輝度変化を抽出することを特徴とする請求項6に記載のマニュピュレーション装置。
- ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、リンク回転角に応じて前記リンク機構を構成する第1リンクからの反射光の第1の輝度を変化させる第1の輝度変化手段と、該第1の輝度変化手段の近傍で前記リンク回転角に応じて前記リンク機構を構成する第2リンクからの反射光の第2の輝度を変化させる第2の輝度変化手段と、前記撮像手段の出力から前記第1、第2の輝度変化手段による前記第1、第2の輝度変化を抽出する輝度変化抽出手段と、前記第1の輝度と前記第2の輝度の割合から前記リンク回転角を求めるリンク回転角検出手段と、該リンク回転角検出手段の結果により前記リンク機構を駆動してそのリンク回転角を制御する制御手段を有することを特徴とするマニュピュレーション装置。
- 前記リンク回転軸と前記撮像手段とは偏光板を有し、前記第1、第2の輝度変化手段は互いに前記偏光板による偏光の方向が異なるようにしたことを特徴とする請求項8に記載のマニュピュレーション装置。
- 前記第1、第2の輝度変化手段の偏光方向は互いに直交するようにしたことを特徴とする請求項9に記載のマニュピュレーション装置。
- 前記リンク回転角検出手段からテンプレートマッチングの探索範囲を限定する探索範囲限定手段と、該探索範囲限定手段により限定された範囲内のテンプレートマッチングにより前記リンク機構に設けたマーカを探索する探索手段と、前記リンク回転角を前記マーカにより前記リンク回転角検出手段が演算し、前記探索手段の出力を前記リンク回転角として更新するリンク回転角更新手段とを備えたことを特徴とする請求項1〜10の何れか1つの請求項に記載のマニュピュレーション装置。
- ワークを把持するための回転軸を備えたリンク機構と、前記ワークと前記リンク機構を撮像する撮像手段とを備えたマニュピュレーション装置において、前記リンク機構の回転角に応じて前記リンク機構を構成する部材からの反射光の輝度を変化させる輝度変化工程と、該輝度変化工程による輝度変化を前記撮像手段により撮像する撮像工程と、該撮像工程の出力から前記輝度変化を抽出する輝度変化抽出工程と、抽出した前記輝度変化を基に前記リンク回転角を検出するリンク回転角検出工程と、該リンク回転角検出工程による結果によって前記リンク機構を駆動し前記リンク回転角を制御する制御工程とを有することを特徴とするマニュピュレーション装置の制御方法。
- 請求項12に記載のマニュピュレーション装置の制御方法をコンピュータで実行するためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008104302A JP2009255192A (ja) | 2008-04-14 | 2008-04-14 | マニュピュレーション装置及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008104302A JP2009255192A (ja) | 2008-04-14 | 2008-04-14 | マニュピュレーション装置及びその制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009255192A true JP2009255192A (ja) | 2009-11-05 |
Family
ID=41383290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008104302A Pending JP2009255192A (ja) | 2008-04-14 | 2008-04-14 | マニュピュレーション装置及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009255192A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020261881A1 (ja) * | 2019-06-27 | 2020-12-30 | ||
| JPWO2021010016A1 (ja) * | 2019-07-12 | 2021-01-21 | ||
| CN114555240A (zh) * | 2019-10-11 | 2022-05-27 | 松下知识产权经营株式会社 | 末端执行器以及末端执行器的控制装置 |
| WO2024213748A1 (en) * | 2023-04-14 | 2024-10-17 | Brütsch Elektronik Ag | Manipulating device |
-
2008
- 2008-04-14 JP JP2008104302A patent/JP2009255192A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020261881A1 (ja) * | 2019-06-27 | 2020-12-30 | ||
| WO2020261881A1 (ja) * | 2019-06-27 | 2020-12-30 | パナソニックIpマネジメント株式会社 | エンドエフェクタの制御システムおよびエンドエフェクタの制御方法 |
| CN114025928A (zh) * | 2019-06-27 | 2022-02-08 | 松下知识产权经营株式会社 | 末端执行器的控制系统以及末端执行器的控制方法 |
| JP7186349B2 (ja) | 2019-06-27 | 2022-12-09 | パナソニックIpマネジメント株式会社 | エンドエフェクタの制御システムおよびエンドエフェクタの制御方法 |
| JPWO2021010016A1 (ja) * | 2019-07-12 | 2021-01-21 | ||
| CN114555240A (zh) * | 2019-10-11 | 2022-05-27 | 松下知识产权经营株式会社 | 末端执行器以及末端执行器的控制装置 |
| US11999069B2 (en) | 2019-10-11 | 2024-06-04 | Panasonic Intellectual Property Management Co., Ltd. | End effector, and control device for controlling end effector |
| WO2024213748A1 (en) * | 2023-04-14 | 2024-10-17 | Brütsch Elektronik Ag | Manipulating device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112276936B (zh) | 三维数据生成装置以及机器人控制系统 | |
| JP6180087B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP2690603B2 (ja) | 視覚センサのキャリブレーション方法 | |
| JP7111114B2 (ja) | 情報処理装置、情報処理方法及び情報処理システム | |
| JP5233601B2 (ja) | ロボットシステム、ロボット制御装置およびロボット制御方法 | |
| JP6180086B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP5200772B2 (ja) | ロボット装置の制御方法及びロボット装置 | |
| EP2671686A1 (en) | Master operation input device and master-slave manipulator | |
| JP5282717B2 (ja) | ロボットシステム | |
| US20110320039A1 (en) | Robot calibration system and calibrating method thereof | |
| JP2019113895A (ja) | ワークを撮像する視覚センサを備える撮像装置 | |
| US20240235142A1 (en) | Electronic device assembly apparatus and electronic device assembly method | |
| CN110842890B (zh) | 一种机器人及其控制方法 | |
| JP6897396B2 (ja) | 制御装置、ロボットシステムおよび制御方法 | |
| CN108326848B (zh) | 机器人 | |
| CN114619233A (zh) | 锁付定位方法、螺丝锁付方法、锁付定位装置及螺丝机 | |
| JP2009255192A (ja) | マニュピュレーション装置及びその制御方法 | |
| JP2015071207A (ja) | ロボットハンドおよびその制御方法 | |
| JP2019089180A (ja) | ロボット及びロボットシステム | |
| CN115972192A (zh) | 具有可变空间分辨率的3d计算机视觉系统 | |
| JP2015003348A (ja) | ロボット制御システム、制御装置、ロボット、ロボット制御システムの制御方法及びロボットの制御方法 | |
| JP2005349490A (ja) | 多自由度多指ハンド | |
| CN118804823A (zh) | 机器人和用于控制机器人的方法 | |
| JP2019042853A (ja) | 画像情報処理装置、把持システム、および画像情報処理方法 | |
| WO2022124232A1 (ja) | 画像処理システム及び画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100218 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |