JP2009255196A - パラレルメカニズム - Google Patents
パラレルメカニズム Download PDFInfo
- Publication number
- JP2009255196A JP2009255196A JP2008104332A JP2008104332A JP2009255196A JP 2009255196 A JP2009255196 A JP 2009255196A JP 2008104332 A JP2008104332 A JP 2008104332A JP 2008104332 A JP2008104332 A JP 2008104332A JP 2009255196 A JP2009255196 A JP 2009255196A
- Authority
- JP
- Japan
- Prior art keywords
- origin
- drive
- arm
- drive motor
- drive arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Manipulator (AREA)
Abstract
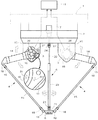
【解決手段】複数の駆動アームおよびロッドと、操作ヘッドを備えている回転型のパラレルメカニズムにおいて、駆動アームの外面に基準突起を設け、駆動アームの通常動作範囲の外に臨むベースの外面に、原点復帰操作された駆動アームの基準突起を受け止める原点体を設ける。以て、駆動アームを原点復帰操作して、基準突起が原点体に接当する状態において、駆動モーターの出力トルクが設定値に達したことを制御回路で判定して前記駆動モーターを停止し、同時に駆動モーターからフィードバックされる位置信号に基づき制御回路で原点位置を特定する。
【選択図】図1
Description
3 駆動モーター
5 操作ヘッド
10 モーターブラケット
11 制御回路
14 駆動アーム
15 ロッド
16 アームボス
26 基準突起(基準ピン)
27 原点体(原点ピン)
30・31 合マーク
Claims (3)
- 操作ヘッドの作業領域の上方に配置されるベースと、前記ベースに配置される複数個の駆動モーターと、前記駆動モーターで上下に旋回駆動される駆動アームと、前記駆動アームの旋回動作を前記操作ヘッドに伝えるロッドと、前記駆動モーターの作動状態を制御する制御回路を有するパラレルメカニズムであって、
前記駆動アームの外面に基準突起が設けられ、前記駆動アームの通常動作範囲の外に臨む前記ベースの外面に、原点復帰操作された前記駆動アームの前記基準突起を受け止める原点体が設けられており、
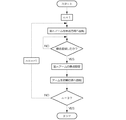
前記駆動アームを原点復帰操作して、前記基準突起が前記原点体に接当する状態において、前記駆動モーターの出力トルクが設定値に達したことを前記制御回路で判定して前記駆動モーターを停止し、同時に前記駆動モーターからフィードバックされる位置信号に基づき前記制御回路で原点位置を特定するパラレルメカニズム。 - 前記駆動モーターが前記ベースに固定したモーターブラケットで支持されており、
前記駆動アームの基端に設けたアームボスが、前記駆動モーターの出力軸に固定されており、
前記基準突起が前記アームボスの周面に固定され、前記原点体が前記モーターブラケットに固定してある請求項1記載のパラレルメカニズム。 - 前記駆動アームが原点復帰前の初期位置に位置していることを示す一対の合マークが、前記モーターブラケットと前記アームボスとに設けてある請求項1または2記載のパラレルメカニズム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008104332A JP2009255196A (ja) | 2008-04-14 | 2008-04-14 | パラレルメカニズム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008104332A JP2009255196A (ja) | 2008-04-14 | 2008-04-14 | パラレルメカニズム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009255196A true JP2009255196A (ja) | 2009-11-05 |
Family
ID=41383294
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008104332A Pending JP2009255196A (ja) | 2008-04-14 | 2008-04-14 | パラレルメカニズム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009255196A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102069495A (zh) * | 2009-11-23 | 2011-05-25 | 鸿富锦精密工业(深圳)有限公司 | 并联机器人 |
| JP2014102177A (ja) * | 2012-11-21 | 2014-06-05 | Toyota Motor Corp | 回転トルク検査装置及び位相管理方法 |
| JP2018030190A (ja) * | 2016-08-24 | 2018-03-01 | 株式会社ロボテック | パラレルリンクロボットシステム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0457686A (ja) * | 1990-06-27 | 1992-02-25 | Hitachi Ltd | 産業用ロボット |
| JPH07148679A (ja) * | 1993-11-25 | 1995-06-13 | Toyoda Mach Works Ltd | パラレルロボット |
| JP2006289588A (ja) * | 2005-04-14 | 2006-10-26 | Matsushita Electric Ind Co Ltd | 産業用ロボットの原点調整方法 |
-
2008
- 2008-04-14 JP JP2008104332A patent/JP2009255196A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0457686A (ja) * | 1990-06-27 | 1992-02-25 | Hitachi Ltd | 産業用ロボット |
| JPH07148679A (ja) * | 1993-11-25 | 1995-06-13 | Toyoda Mach Works Ltd | パラレルロボット |
| JP2006289588A (ja) * | 2005-04-14 | 2006-10-26 | Matsushita Electric Ind Co Ltd | 産業用ロボットの原点調整方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102069495A (zh) * | 2009-11-23 | 2011-05-25 | 鸿富锦精密工业(深圳)有限公司 | 并联机器人 |
| CN102069495B (zh) * | 2009-11-23 | 2014-01-22 | 鸿富锦精密工业(深圳)有限公司 | 并联机器人 |
| JP2014102177A (ja) * | 2012-11-21 | 2014-06-05 | Toyota Motor Corp | 回転トルク検査装置及び位相管理方法 |
| JP2018030190A (ja) * | 2016-08-24 | 2018-03-01 | 株式会社ロボテック | パラレルリンクロボットシステム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2789432B1 (en) | Parallel link robot | |
| US20120060637A1 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| JP5499156B2 (ja) | 位置決め装置及び加工システムと、熱間加工装置 | |
| JP6399591B2 (ja) | ロボットアーム機構及びステッピングモータ制御装置 | |
| JP4822558B2 (ja) | パラレルメカニズムの原点復帰方法 | |
| JP2010184328A (ja) | 3自由度を有する姿勢変更機構を備えたパラレルリンクロボット | |
| US10639788B2 (en) | Parallel link robot | |
| JP2019534165A (ja) | ロボット支援による表面加工機械 | |
| KR101182600B1 (ko) | 실린더 형태의 큰 작업영역을 갖는 병렬형 로봇기구 | |
| JP7576656B2 (ja) | 多関節ロボット | |
| CN102950594B (zh) | 机器人和机器人系统 | |
| JP6964494B2 (ja) | ロボットの直接教示装置及びその方法 | |
| WO2014029448A1 (en) | Calibration tool for a delta robot | |
| JP2019104099A (ja) | ロボットハンド、ロボットハンドの制御方法 | |
| JP2009255196A (ja) | パラレルメカニズム | |
| KR20160050899A (ko) | 파지력 제어가 가능한 그리퍼를 포함하는 조립용 로봇 핸드 | |
| JP4674916B2 (ja) | パラレルメカニズム | |
| JP2021065944A (ja) | ロボット | |
| JP6688204B2 (ja) | リンク式多関節ロボット | |
| CN106182080A (zh) | 一种可全方位转动的旋转伸缩型机械手臂 | |
| JP2015160298A (ja) | パラレルリンクロボット | |
| KR101439748B1 (ko) | 교시 시스템을 갖는 로봇 및 이의 교시 방법 | |
| JP2019084650A (ja) | ロボット装置及び組立品の製造方法 | |
| CN111716343B (zh) | 机器人 | |
| WO2006117025A1 (en) | An industrial robot with a releasable safety coupling mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20090724 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20110119 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A977 | Report on retrieval |
Effective date: 20110120 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110317 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110824 |