JP2009255666A - 車両の車線逸脱警報装置 - Google Patents
車両の車線逸脱警報装置 Download PDFInfo
- Publication number
- JP2009255666A JP2009255666A JP2008105481A JP2008105481A JP2009255666A JP 2009255666 A JP2009255666 A JP 2009255666A JP 2008105481 A JP2008105481 A JP 2008105481A JP 2008105481 A JP2008105481 A JP 2008105481A JP 2009255666 A JP2009255666 A JP 2009255666A
- Authority
- JP
- Japan
- Prior art keywords
- lane
- vehicle
- shape
- travel lane
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Traffic Control Systems (AREA)
Abstract
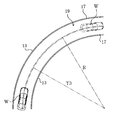
【解決手段】走行車線19を認識する走行車線認識部と、進路を推定する進路推定部と、走行車線19からの逸脱を判定する車線逸脱判定部と、逸脱判定時に警報を行うスピーカとを備えている車両Wの車線逸脱警報装置である。車線逸脱判定部は、判定ライン15,15と進路とに基づいて、車両Wが判定ラインから逸脱したこと又は逸脱しそうなことをもって逸脱を判定する。走行車線19の形状を認識する走行車線形状認識部と、走行車線19の曲率半径Rを検出する曲率半径検出部と、車両Wの旋回半径T1を検出する旋回半径検出部と、走行車線19の形状と、曲率半径Rと旋回半径T1との差とに応じて判定ライン15,15を設定する判定ライン設定部とをさらに備えている。
【選択図】図4
Description
図1は、本発明に係る車線逸脱警報装置を搭載した車両W(自車両に相当し、本実施形態では自動車である)を示す。同図において、符号1は車両Wに設けられた各種機器の制御を行うECUであり、符号3はスピーカ(警報手段)であり、符号5は車両Wの前方を撮像するCCDカメラ(撮像手段)である。
ここで、車線逸脱警報装置の処理動作について、図7のフローチャートに基づいて説明する。
本実施形態によれば、車両Wが判定ラインから逸脱したこと又は逸脱しそうなことをもって車両Wの走行車線19からの逸脱を判定するとともに、走行車線19の形状と、走行車線19の曲率半径Rと車両Wの旋回半径との差とに応じて判定ラインを設定するので、車両Wが走行車線19から逸脱する可能性の高低に応じて判定ラインを設定することが可能となる。したがって、車両Wの走行車線19からの逸脱の可能性の高いときに、乗員に対し早期に軌道修正することを促して車両Wの走行車線19からの逸脱を抑制することが可能となる。
本実施形態は、判定ライン設定部1gによる判定ラインの設定方法が実施形態1と異なるものである。以下、実施形態1と異なる点について説明する。
本実施形態によれば、判定ライン設定部1gは、走行車線形状認識部1cにより認識された走行車線19の形状が曲線形状であるときには、曲率半径検出部1dにより検出された走行車線19の曲率半径Rと旋回半径検出部1fにより検出された車両Wの旋回半径との差が大きいほど、判定ライン35,3519を走行車線の幅方向内側寄りに設定するように構成されているので、車両Wの逸脱の可能性が高いときほど、逸脱警報を早期に行うことができる。
上記実施形態では、走行車線形状認識部1cは、ナビゲーション装置11のDVD−ROM11bに記憶された道路形状情報に基づいて、車両Wが現在走行している走行車線19の形状及び曲率半径Rを認識するように構成されているが、これに限らず、例えば、CCDカメラ5により撮像された画像データに基づいて走行車線19の形状を認識するとともに曲率半径Rを算出するようにしてもよい。
1b 走行車線認識部(走行車線認識手段)
1c 走行車線形状認識部(走行車線形状認識手段)
1d 曲率半径検出部(曲率半径検出手段)
1e 進路推定部(進路推定手段)
1f 旋回半径検出部(旋回半径検出手段)
1g 判定ライン設定部(判定ライン設定手段)
1h 車線逸脱判定部(車線逸脱判定手段)
3 スピーカ(警報手段)
5 CCDカメラ(撮像手段)
13 第1判定ライン(判定ライン)
15 第2判定ライン(判定ライン)
17 白線(走行区分線)
19 走行車線
35 判定ライン
R 曲率半径
T1,T2,T3,T4,T5 旋回半径
W 車両(自車両)
Claims (6)
- 自車両が現在走行している走行車線を認識する走行車線認識手段と、該自車両の今後予想される進路を推定する進路推定手段と、上記走行車線認識手段により認識された走行車線に略平行に延びるように設定された判定ラインと該進路推定手段により推定された進路とに基づいて、上記自車両が該判定ラインから逸脱したこと又は逸脱しそうなことをもって該自車両の該走行車線からの逸脱を判定する車線逸脱判定手段と、該車線逸脱判定手段により逸脱と判定されたときに、警報を行う警報手段とを備えている車両の車線逸脱警報装置であって、
上記走行車線の形状を認識する走行車線形状認識手段と、
上記走行車線の曲率半径を検出する曲率半径検出手段と、
上記自車両の旋回半径を検出する旋回半径検出手段と、
上記走行車線形状認識手段により認識された走行車線の形状と、上記曲率半径検出手段により検出された走行車線の曲率半径と上記旋回半径検出手段により検出された自車両の旋回半径との差とに応じて、上記判定ラインを設定する判定ライン設定手段とをさらに備えていることを特徴とする車両の車線逸脱警報装置。 - 請求項1記載の車両の車線逸脱警報装置において、
上記判定ライン設定手段は、上記走行車線形状認識手段により認識された走行車線の形状が直線形状であるときには、上記判定ラインとして第1判定ラインを設定する一方、上記走行車線形状認識手段により認識された走行車線の形状が曲線形状である場合であって、上記差が所定値以上のときには、上記判定ラインとして、該第1判定ラインよりも上記走行車線の幅方向内側の第2判定ラインを設定するように構成されていることを特徴とする車両の車線逸脱警報装置。 - 請求項2記載の車両の車線逸脱警報装置において、
上記第1判定ラインは、走行区分線であることを特徴とする車両の車線逸脱警報装置。 - 請求項1記載の車両の車線逸脱警報装置において、
上記判定ライン設定手段は、上記走行車線形状認識手段により認識された走行車線の形状が曲線形状であるときには、上記差が大きいほど、上記判定ラインを上記走行車線の幅方向内側寄りに設定するように構成されていることを特徴とする車両の車線逸脱警報装置。 - 請求項1〜4のいずれか1つに記載の車両の車線逸脱警報装置において、
上記自車両前方を撮像する撮像手段と、
上記撮像手段により撮像された画像に基づいて、道路上における上記自車両前方の走行区分線を検知する区分線検知手段とをさらに備えており、
上記走行車線認識手段は、上記区分線検知手段により検知された走行区分線に基づいて上記走行車線を認識するように構成されていることを特徴とする車両の車線逸脱警報装置。 - 請求項1〜5のいずれか1つに記載の車両の車線逸脱警報装置において、
上記進路推定手段は、上記自車両のヨーレートと車速とに基づいて上記進路を推定するように構成されていることを特徴とする車両の車線逸脱警報装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008105481A JP2009255666A (ja) | 2008-04-15 | 2008-04-15 | 車両の車線逸脱警報装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008105481A JP2009255666A (ja) | 2008-04-15 | 2008-04-15 | 車両の車線逸脱警報装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009255666A true JP2009255666A (ja) | 2009-11-05 |
Family
ID=41383667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008105481A Pending JP2009255666A (ja) | 2008-04-15 | 2008-04-15 | 車両の車線逸脱警報装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009255666A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120058022A (ko) * | 2010-11-29 | 2012-06-07 | 현대자동차주식회사 | 가상 차선 생성 방법 |
| US20150298694A1 (en) * | 2014-04-16 | 2015-10-22 | Hyundai Motor Company | Vehicle control system and method for self-control driving thereof |
| CN105416167A (zh) * | 2015-12-03 | 2016-03-23 | 上汽大众汽车有限公司 | 汽车喇叭的控制方法 |
| JP2025150549A (ja) * | 2024-03-27 | 2025-10-09 | 本田技研工業株式会社 | 車両用制御装置、車両用制御方法、およびプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0816997A (ja) * | 1994-06-27 | 1996-01-19 | Mazda Motor Corp | 自動車の走行状態判定装置 |
| JP2006206032A (ja) * | 2004-12-27 | 2006-08-10 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2008024042A (ja) * | 2006-07-18 | 2008-02-07 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
-
2008
- 2008-04-15 JP JP2008105481A patent/JP2009255666A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0816997A (ja) * | 1994-06-27 | 1996-01-19 | Mazda Motor Corp | 自動車の走行状態判定装置 |
| JP2006206032A (ja) * | 2004-12-27 | 2006-08-10 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2008024042A (ja) * | 2006-07-18 | 2008-02-07 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120058022A (ko) * | 2010-11-29 | 2012-06-07 | 현대자동차주식회사 | 가상 차선 생성 방법 |
| KR101646276B1 (ko) * | 2010-11-29 | 2016-08-05 | 현대자동차주식회사 | 가상 차선 생성 방법 |
| US20150298694A1 (en) * | 2014-04-16 | 2015-10-22 | Hyundai Motor Company | Vehicle control system and method for self-control driving thereof |
| US9771072B2 (en) * | 2014-04-16 | 2017-09-26 | Hyundai Motor Company | Vehicle control system and method for self-control driving thereof |
| CN105416167A (zh) * | 2015-12-03 | 2016-03-23 | 上汽大众汽车有限公司 | 汽车喇叭的控制方法 |
| JP2025150549A (ja) * | 2024-03-27 | 2025-10-09 | 本田技研工業株式会社 | 車両用制御装置、車両用制御方法、およびプログラム |
| JP7781204B2 (ja) | 2024-03-27 | 2025-12-05 | 本田技研工業株式会社 | 車両用制御装置、車両用制御方法、およびプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105015547B (zh) | 驾驶辅助装置 | |
| EP1564703B1 (en) | Vehicle driving assist system | |
| JP6269840B2 (ja) | 運転支援装置及び運転支援方法 | |
| US11242048B2 (en) | Parking assistance method and parking control device | |
| JP4108706B2 (ja) | 車線逸脱防止装置 | |
| JP6364869B2 (ja) | 運転支援装置 | |
| JP4832489B2 (ja) | 車線判定装置 | |
| JP5141333B2 (ja) | 車両の車線逸脱警報装置 | |
| JP5991382B2 (ja) | 車両用加速抑制装置及び車両用加速抑制方法 | |
| KR20080037712A (ko) | 대상물 인식 장치 | |
| JP2015165368A (ja) | 走行区画線認識装置 | |
| WO2010035781A1 (ja) | 車線判定装置及びナビゲーションシステム | |
| JP2010002953A (ja) | 車両の車線逸脱警報装置 | |
| JP2019038289A (ja) | 車両の運転支援装置 | |
| WO2006129834A1 (ja) | 車両逸脱防止制御装置 | |
| JP2016224802A (ja) | 車両制御装置及びプログラム | |
| JP5716945B2 (ja) | 車両制御装置 | |
| JP5113543B2 (ja) | 車両進行路推定装置 | |
| KR20180015018A (ko) | 차선정보 추정 방법 | |
| JP4767930B2 (ja) | 車両の走行安全装置 | |
| JP2011012965A (ja) | 車線判定装置及びナビゲーションシステム | |
| JP2016037192A (ja) | 走行支援装置及び走行支援方法 | |
| JP6207952B2 (ja) | 先行車認識装置 | |
| JP2009298362A (ja) | 車両の車線逸脱警報装置 | |
| JP2009255666A (ja) | 車両の車線逸脱警報装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110413 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120508 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121009 |