JP2009255697A - 作業車のサスペンション構造 - Google Patents
作業車のサスペンション構造 Download PDFInfo
- Publication number
- JP2009255697A JP2009255697A JP2008106155A JP2008106155A JP2009255697A JP 2009255697 A JP2009255697 A JP 2009255697A JP 2008106155 A JP2008106155 A JP 2008106155A JP 2008106155 A JP2008106155 A JP 2008106155A JP 2009255697 A JP2009255697 A JP 2009255697A
- Authority
- JP
- Japan
- Prior art keywords
- hydraulic cylinder
- operated
- damping force
- brake
- suspension mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Vehicle Body Suspensions (AREA)
Abstract
【解決手段】 前輪のサスペンション機構7と、走行用のブレーキ、サスペンション機構7の減衰力を変更可能な減衰力変更手段とを備える。、ブレーキが制動状態に操作されると、衰力変更手段を減衰力の強側に操作する。
【選択図】 図1
Description
サスペンション機構を前輪に備えた作業車において、走行中にブレーキが制動状態に操作されると、機体の前進の慣性力により機体は前下がり状態となり、前下がり状態の反動により機体は前上がり状態になって、機体の前部の上下動が繰り返されることがある (ノーズダイブ現象)。
本発明は、サスペンション機構を前輪に備えた作業車において、走行中にブレーキが制動状態に操作された場合、機体の前部の上下動 (ノーズダイブ現象)を抑えながら、運転者にとっての乗り心地を向上させることを目的としている。
(構成)
本発明の第1特徴は、作業車のサスペンション構造において次のように構成することにある。
前輪のサスペンション機構と、走行用のブレーキと、サスペンション機構の減衰力を変更可能な減衰力変更手段とを備える。ブレーキが制動状態に操作されると、減衰力変更手段を減衰力の強側に操作する操作手段を備える。
本発明の第1特徴によれば、走行中にブレーキが制動状態に操作されると、減衰力変更手段が減衰力の強側に操作されて、サスペンション機構が作動し難い状態(硬い状態)となる。
このようにサスペンション機構を作動し難い状態(硬い状態)とすることにより、機体の前部の上下動(ノーズダイブ現象)を完全に止めてしまうのではなく、サスペンション機構により、機体の前部の上下動(ノーズダイブ現象)を抑えながら、機体の前部の上下動(ノーズダイブ現象)を少し許して機体の前進の慣性力を吸収することができる。
本発明の第1特徴によると、サスペンション機構を前輪に備えた作業車において、走行中にブレーキが制動状態に操作された場合、機体の前部の上下動(ノーズダイブ現象)を抑えながら、機体の前進の慣性力を吸収することができるようになって、運転者にとっての乗り心地を向上させることができた。
(構成)
本発明の第2特徴は、本発明の第1特徴の作業車のサスペンション構造において次のように構成することにある。
ブレーキが解除状態に操作されてから設定時間の経過後に、減衰力変更手段を減衰力の強側に操作される前の減衰力に操作するように、操作手段を構成する。
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
一般に、走行中にブレーキが制動状態に操作されて機体 (走行)が停止した後においても、少しの間だけ機体の前部の上下動(ノーズダイブ現象)が残ることが多い。
これにより、走行中にブレーキが制動状態に操作されて機体 (走行)が停止した後に、機体の前部の上下動(ノーズダイブ現象)が残った場合、ブレーキが解除状態に操作されても設定時間の間だけ、サスペンション機構が作動し難い状態(硬い状態)が維持されるので、この間に機体の前部の上下動(ノーズダイブ現象)が抑えられる。
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第2特徴によると、走行中にブレーキが制動状態に操作されて機体 (走行)が停止した後に、機体の前部の上下動(ノーズダイブ現象)が残っても、機体の前部の上下動(ノーズダイブ現象)を適切に抑えることができるようになって、運転者にとっての乗り心地を向上させることができた。
図1に示すように、右及び左の前輪1、右及び左の後輪2を備えて、作業車の一例である四輪駆動型の農用トラクタが構成されている。右及び左の後輪2は機体後部のミッションケース3にサスペンション機構を介して支持されておらず、位置固定状態で支持されている。
次に、油圧シリンダ7の油圧回路構造について説明する。
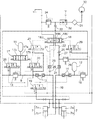
図3に示すように、油圧シリンダ7は底部側の油室7a及びピストン側の油室7bを備えた複動型に構成されている。油圧シリンダ7の油室7aに接続された油路9に、ガス封入式のアキュムレータ11、パイロット操作式の一対の逆止弁13及び油圧回路の保護用のリリーフ弁15が接続されており、切換弁17 (減衰力変更手段に相当)がアキュムレータ11の手前部分に備えられている。
パイロット弁19,20,29は電磁操作式であり、後述の[3]〜[7]に記載のように、制御装置35によってパイロット弁19及びパイロット弁20,29が操作され、逆止弁13,14、制御弁18及び切換弁17が操作される。
次に、油圧シリンダ7の作動について説明する。
前項[2]に記載の構造により、図3に示すように、制御弁18が中立位置18Nに操作され、逆止弁13,14が開放状態に操作されている場合、地面の凹凸に応じて前車軸ケース8及び支持ブラケット6が横軸芯P1周りに上下に揺動しようとすると、油圧シリンダ7が伸縮して、油圧シリンダ7の油室7a,7bとアキュムレータ11,12との間で作動油が往復し、油圧シリンダ7がバネ定数K1を備えたサスペンション機構として作動する。
式(1) M×g=PH×AH−MP1×AR
次に、切換弁17の操作の前半について説明する。
図6に示すように、右の後輪2を制動可能な右のサイドブレーキ38(ブレーキに相当)、及び、右のサイドブレーキ38を制動状態に操作可能な右のサイドブレーキペダル39が備えられており、左の後輪2を制動可能な左のサイドブレーキ38(ブレーキに相当)、及び、左のサイドブレーキ38を制動状態に操作可能な左のサイドブレーキペダル39が備えられている。
この農用トラクタは四輪駆動型であり、右及び左の前輪1と右及び左の後輪2とが伝動系でつながっているので、右及び左のサイドブレーキ38が制動状態に操作されて右及び左の後輪2に制動が掛かると、右及び左の前輪1にも制動が掛かる。
次に、切換弁17の操作の後半について説明する。
走行中に右及び左のサイドブレーキ38が制動状態に操作されると、機体の前進の慣性力により機体は前下がり状態となり (油圧シリンダ7の収縮)、前下がり状態の反動により機体は前上がり状態になって (油圧シリンダ7の伸長)、機体の前部の上下動が繰り返されることがある (ノーズダイブ現象)。
設定時間T13が経過すると(ステップS9)、ステップS1〜S5に移行するのであり、前項[5]に記載のように、機体の前部に掛かる重量(油圧シリンダ7に掛かる重量)Mに基づいて、切換弁17が第1及び第2位置17a,17bに操作される。
次に、油圧シリンダ7の制御の前半について、図8に基づいて説明する。
図6に示すように、油圧シリンダ7の作動位置(伸縮位置)を検出する作動位置センサー37が備えられて、作動位置センサー37の検出値が制御装置35に入力されており、制御装置35において油圧シリンダ7の作動位置(伸縮位置)が記憶されている。この場合、伸縮式の作動位置センサー37を油圧シリンダ7に直接に取り付けて、油圧シリンダ7の作動位置(伸縮位置)を検出したり、ロータリ式の作動位置センサー37を図2に示す横軸芯P1の位置に取り付けて、支持フレーム5に対する支持ブラケット6の角度を検出することによって、油圧シリンダ7の作動位置(伸縮位置)を検出する。
ステップS15,S16において、設定時間T11をある程度長いものに設定すると、設定時間T11の間に複数個の極大位置A1及び複数個の極小位置A2が検出される。この場合には、複数個の極大位置A1のうちの最大の極大位置A1を検出し、複数個の極小位置A2のうちの最小の極小位置A2を検出して、最大の極大位置A1及び最小の極小位置A2から中間位置B1が検出される(ステップS17)。
次に、油圧シリンダ7の制御の後半について、図8に基づいて説明する。
積算回数Nと下降側設定回数ND1及び上昇側設定回数NU1とが比較され、積算回数Nが下降側設定回数ND1に達すると(下回ると)(ステップS21)、機体の前部が下降し、機体が地面に対して前下がり状態であると判断されて、制御弁18が上昇位置18Uに操作され、逆止弁13,14が作動状態に操作される(ステップS23)。
前述の[発明を実施するための最良の形態]の図8のステップS15〜S16において設定時間T11を少し長く設定して、複数個の極大位置A1及び複数個の極小位置A2を検出するように構成した場合、以下のようにして図8のステップS17の中間位置B1を検出してもよい。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]において、中間位置B1を極大及び極小位置A1,A2の間の中央の位置に設定するのではなく、機体の前部に装着する作業装置(例えばフロントローダ)の有無や種類、作業形態等に基づいて、中間位置B1を極大及び極小位置A1,A2の間の中央の位置から少し機体上昇側(油圧シリンダ7の伸長側)の位置に設定したり、中間位置B1を極大及び極小位置A1,A2の間の中央の位置から少し機体下降側(油圧シリンダ7の収縮側)の位置に設定したりしてもよい。
例えば機体の前部に作業装置(例えばフロントローダ)を装着した場合、中間位置B1を極大及び極小位置A1,A2の間の中央の位置から少し機体上昇側(油圧シリンダ7の伸長側)の位置に設定することにより、機体が地面に対して少し前上がり状態になるようにすればよい。
本発明は、右及び左の後輪2にも油圧シリンダ7等によるサスペンション機構を備えた作業車や、後二輪駆動型式の作業車にも適用できる。
17 減衰力変更手段
38 ブレーキ
T13 設定時間
Claims (2)
- 前輪のサスペンション機構と、走行用のブレーキと、前記サスペンション機構の減衰力を変更可能な減衰力変更手段とを備え、
前記ブレーキが制動状態に操作されると、前記減衰力変更手段を減衰力の強側に操作する操作手段を備えてある作業車のサスペンション構造。 - 前記ブレーキが解除状態に操作されてから設定時間の経過後に、前記減衰力変更手段を減衰力の強側に操作される前の減衰力に操作するように、前記操作手段を構成してある請求項1に記載の作業車のサスペンション構造。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008106155A JP5149679B2 (ja) | 2008-04-15 | 2008-04-15 | トラクタのサスペンション構造 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008106155A JP5149679B2 (ja) | 2008-04-15 | 2008-04-15 | トラクタのサスペンション構造 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009255697A true JP2009255697A (ja) | 2009-11-05 |
| JP5149679B2 JP5149679B2 (ja) | 2013-02-20 |
Family
ID=41383693
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008106155A Active JP5149679B2 (ja) | 2008-04-15 | 2008-04-15 | トラクタのサスペンション構造 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5149679B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2502766A1 (en) | 2011-03-22 | 2012-09-26 | Kubota Corporation | Tractor |
| CN107074099A (zh) * | 2014-09-09 | 2017-08-18 | 洋马株式会社 | 作业车辆 |
| US10131386B2 (en) * | 2013-11-29 | 2018-11-20 | BAE Systems Hägglunds Aktiebolag | Nose-dive reducing suspension lock arrangement for motor vehicle |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6320208A (ja) * | 1986-07-11 | 1988-01-27 | Mitsubishi Motors Corp | 車両制動時のノ−ズダイブ回避方法 |
-
2008
- 2008-04-15 JP JP2008106155A patent/JP5149679B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6320208A (ja) * | 1986-07-11 | 1988-01-27 | Mitsubishi Motors Corp | 車両制動時のノ−ズダイブ回避方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2502766A1 (en) | 2011-03-22 | 2012-09-26 | Kubota Corporation | Tractor |
| US8762001B2 (en) | 2011-03-22 | 2014-06-24 | Kubota Corporation | Tractor |
| US10131386B2 (en) * | 2013-11-29 | 2018-11-20 | BAE Systems Hägglunds Aktiebolag | Nose-dive reducing suspension lock arrangement for motor vehicle |
| CN107074099A (zh) * | 2014-09-09 | 2017-08-18 | 洋马株式会社 | 作业车辆 |
| CN107074099B (zh) * | 2014-09-09 | 2019-05-21 | 洋马株式会社 | 作业车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5149679B2 (ja) | 2013-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101214265B1 (ko) | 서스펜션 시스템 | |
| CN100408364C (zh) | 车辆用接地载荷控制装置 | |
| JP5830379B2 (ja) | 陸上車用多点油圧懸架システム | |
| JP4875561B2 (ja) | 作業車のサスペンション構造 | |
| JP2000264034A (ja) | アクティブサスペンションの制御装置 | |
| JPH0825374B2 (ja) | 能動型サスペンション装置 | |
| JP5149679B2 (ja) | トラクタのサスペンション構造 | |
| JP6361414B2 (ja) | 車両のサスペンション装置 | |
| JP2009006901A (ja) | 作業車両用アクティブサスペンション装置 | |
| JP3092088B2 (ja) | サスペンション装置 | |
| JP5143720B2 (ja) | 作業車 | |
| JP2000264033A (ja) | アクティブサスペンションの制御装置 | |
| JP5075107B2 (ja) | 作業車のサスペンション構造 | |
| JP5149678B2 (ja) | トラクタのサスペンション構造 | |
| JP5525576B2 (ja) | 作業車 | |
| JP5075845B2 (ja) | 作業車 | |
| JP4905050B2 (ja) | 車高制御装置 | |
| JPH04126621A (ja) | 車両用アクティブサスペンション装置 | |
| JP5075108B2 (ja) | 作業車のサスペンション構造 | |
| JP2007191073A (ja) | 車高調整システム | |
| JP2012224338A5 (ja) | ||
| JP5075109B2 (ja) | 作業車 | |
| JP2006143098A (ja) | サスペンション装置 | |
| JPS62283007A (ja) | 車両のロ−ル制御装置 | |
| JP2009255730A (ja) | 作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120423 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120621 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120817 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5149679 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |