JP2009266100A - ドライバ状態推定装置及びプログラム - Google Patents
ドライバ状態推定装置及びプログラム Download PDFInfo
- Publication number
- JP2009266100A JP2009266100A JP2008117368A JP2008117368A JP2009266100A JP 2009266100 A JP2009266100 A JP 2009266100A JP 2008117368 A JP2008117368 A JP 2008117368A JP 2008117368 A JP2008117368 A JP 2008117368A JP 2009266100 A JP2009266100 A JP 2009266100A
- Authority
- JP
- Japan
- Prior art keywords
- probability
- physical quantity
- driver
- value
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000605 extraction Methods 0.000 claims description 16
- 238000001514 detection method Methods 0.000 claims description 14
- 238000004364 calculation method Methods 0.000 claims description 6
- 230000007423 decrease Effects 0.000 claims description 6
- 239000000284 extract Substances 0.000 claims description 6
- 238000005315 distribution function Methods 0.000 abstract description 48
- 238000000034 method Methods 0.000 description 24
- 230000007704 transition Effects 0.000 description 11
- 238000007476 Maximum Likelihood Methods 0.000 description 10
- 210000001508 eye Anatomy 0.000 description 10
- 238000005259 measurement Methods 0.000 description 5
- 206010041349 Somnolence Diseases 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 3
- 238000013075 data extraction Methods 0.000 description 3
- 208000032140 Sleepiness Diseases 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000037321 sleepiness Effects 0.000 description 2
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- 230000004399 eye closure Effects 0.000 description 1
Images













Landscapes
- Emergency Alarm Devices (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】前もってドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができるようにする。
【解決手段】レーン位置センサ12によって、レーン中心からの距離を示すレーン位置信号の時系列データを出力する。分布パラメータ推定部28によって、レーン位置信号の時系列データから抽出される各区間の区間最大値に基づいて、一般極値分布を表わす確率分布関数を決定するパラメータを推定する。逸脱確率推定部30によって、推定されたパラメータによって決定される確率分布関数から、逸脱確率を推定し、逸脱確率予測部34によって、推定された逸脱確率の傾向に基づいて、所定時間後の逸脱確率を予測する。不適運転推定部36によって、予測された逸脱確率に基づいて、ドライバが運転不適状態になるか否かを推定する。
【選択図】図1
【解決手段】レーン位置センサ12によって、レーン中心からの距離を示すレーン位置信号の時系列データを出力する。分布パラメータ推定部28によって、レーン位置信号の時系列データから抽出される各区間の区間最大値に基づいて、一般極値分布を表わす確率分布関数を決定するパラメータを推定する。逸脱確率推定部30によって、推定されたパラメータによって決定される確率分布関数から、逸脱確率を推定し、逸脱確率予測部34によって、推定された逸脱確率の傾向に基づいて、所定時間後の逸脱確率を予測する。不適運転推定部36によって、予測された逸脱確率に基づいて、ドライバが運転不適状態になるか否かを推定する。
【選択図】図1
Description
本発明は、ドライバ状態推定装置及びプログラムに係り、特に、車両の走行状態やドライバの操作状態に基づいて、ドライバの運転適否状態を推定するドライバ状態推定装置及びプログラムに関する。
従来より、道路形状と操舵角との関係から逸脱警報を鳴らす車線逸脱警報装置が知られている(特許文献1)。また、横移動の速度検出を行い、現在自車両が車線を逸脱するかどうかを判定する車線逸脱警報装置が知られている(特許文献2)。これらの車線逸脱警報装置のように、現在の車線などを計測して、ドライバの運転不適検出を行うことにより、現在のドライバの運転行動が不適であることを検出することができる。
特開2002−193055号公報
特開2007−200191号公報
しかしながら、上記の特許文献1、2に記載の技術では、現在の自車位置が適切か否かを判断して警報及び支援操作を行っており、逸脱直前の危険報知には有効であるが、さらに事前に危険報知することができれば、より効果的に事故を抑止することができる。
本発明は、前もってドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができるドライバ状態推定装置及びプログラムを提供することを目的とする。
上記の目的を達成するために本発明に係るドライバ状態推定装置は、自車両の走行状態、ドライバが自車両を操作したときの操作状態、及びドライバの心身状態の少なくとも一つを示す物理量を検出し、前記物理量の時系列データを出力する検出手段と、前記検出手段により出力された前記物理量の時系列データから、前記物理量が所定値以上となる確率及び所定値以下となる確率の何れか一方を示す不適確率を算出する確率算出手段と、前記確率算出手段によって算出された前記不適確率の傾向に基づいて、所定時間後の前記不適確率を予測する確率予測手段と、前記確率予測手段によって予測された前記不適確率に基づいて、前記ドライバの運転適否状態を推定するドライバ状態推定手段とを含んで構成されている。
本発明に係るプログラムは、コンピュータを、自車両の走行状態、ドライバが自車両を操作したときの操作状態、及びドライバの心身状態の少なくとも一つを示す物理量を検出し、前記物理量の時系列データを出力する検出手段により出力された前記物理量の時系列データから、前記物理量が所定値以上となる確率及び所定値以下となる確率の何れか一方を示す不適確率を算出する確率算出手段、前記確率算出手段によって算出された前記不適確率の傾向に基づいて、所定時間後の前記不適確率を予測する確率予測手段、及び前記確率予測手段によって予測された前記不適確率に基づいて、前記ドライバの運転適否状態を推定するドライバ状態推定手段として機能させるためのプログラムである。
本発明によれば、検出手段によって、ドライバが自車両を操作したときの操作状態、及びドライバの心身状態の少なくとも一つを示す物理量を検出し、前記物理量の時系列データを出力する。確率算出手段によって、検出手段により出力された物理量の時系列データから、物理量が所定値以上となる確率及び所定値以下となる確率の何れか一方を示す不適確率を算出する。
そして、確率予測手段によって、確率算出手段によって算出された不適確率の傾向に基づいて、所定時間後の不適確率を予測し、ドライバ状態推定手段によって、確率予測手段によって予測された不適確率に基づいて、ドライバの運転適否状態を推定する。
このように、算出された不適確率の傾向に基づいて、所定時間後の不適確率を予測して、ドライバの運転適否状態を推定することにより、前もってドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができる。
本発明に係るドライバ状態推定装置は、道路地図情報から、所定時間後に自車両が走行している位置の道路形状を取得する道路形状取得手段を更に含み、検出手段は、基準位置を基準とした自車両が走行しているレーン上の位置を示すレーン位置を物理量として検出し、確率算出手段は、所定値をレーン逸脱に相当する値として、不適確率を算出し、ドライバ状態推定手段は、確率予測手段によって予測された不適確率、及び道路形状取得手段によって取得された道路形状が曲線路であるか否かに基づいて、ドライバの運転適否状態を推定することができる。これによって、自車両位置の道路形状が、レーン逸脱の可能性が高くなる曲線路であるか否かを更に考慮することにより、前もってドライバが運転不適状態になるか否かを精度よく推定でき、将来の事故発生を防ぐことができる。
本発明に係る検出手段は、リスクが高くなるに従って大きくなる物理量を検出し、確率算出手段は、検出手段により出力された物理量の時系列データから、閾値以上の物理量及び所定区間毎の値が最大となる物理量の何れか一方を抽出する抽出手段と、抽出手段によって抽出された物理量に基づいて、物理量の値の増加に応じて該物理量となる頻度又は確率が減少するように定めた関数を決定するパラメータを推定する関数推定手段とを備え、関数推定手段によって推定されたパラメータによって決定される関数における、物理量が所定値以上となる頻度又は確率に基づいて、不適確率を算出することができる。これによって、走行状態、操作状態、又は心身状態を示す大きな物理量から、物理量の増加に応じて頻度又は確率が減少する関数を決定するパラメータを推定し、推定されたパラメータによって決定される関数から、ドライバの運転適否状態を推定することにより、ドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができる。
上記の抽出手段は、検出手段により出力された物理量の時系列データから、所定区間毎の値が最大となる物理量を抽出し、関数推定手段は、抽出された物理量に基づいて、一般極値分布を表わす関数を決定するパラメータを推定することができる。
上記の抽出手段は、検出手段により出力された物理量の時系列データから、閾値以上の物理量を抽出し、関数推定手段は、抽出された物理量に基づいて、一般パレート分布を表わす関数を決定するパラメータを推定することができる。
上記の抽出手段は、検出手段により出力された物理量の時系列データから、閾値以上の物理量を抽出し、関数推定手段は、抽出された物理量に基づいて、指数分布を表わす関数を決定するパラメータを推定することができる。
以上説明したように、本発明のドライバ状態推定装置及びプログラムによれば、算出された不適確率の傾向に基づいて、所定時間後の不適確率を予測して、ドライバの運転適否状態を推定することにより、前もってドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができる、という効果が得られる。
以下、図面を参照して本発明の実施の形態を詳細に説明する。なお、車両に搭載されたドライバ状態推定装置に本発明を適用した場合を例に説明する。
図1に示すように、第1の実施の形態に係るドライバ状態推定装置10は、車両の走行状態としてのレーン位置を検出するレーン位置センサ12と、自車両の車速を検出する車速センサ18と、レーン位置センサ12からの出力、自車両の搭載されたGPS14からの出力、ナビゲーションシステム16から得られる道路地図データ、及び車速センサ18からの出力に基づいて、ドライバが運転不適状態であるか否かを推定し、推定結果に応じて、警報装置22によってドライバに対して警報を出力させるコンピュータ20とを備えている。
レーン位置センサ12は、基準位置としてのレーン中心から自車位置までの距離を示すレーン位置を出力し、自車位置がレーン中心から遠ざかるにしたがって大きな値を出力する。従って、レーン位置センサ12によって検出されるレーン位置は、事故発生のリスクが高くなるに従って、値が大きくなる。なお、レーン位置センサ12では、例えば、走行時のビデオ画像からレーン中心とレーン端とを検出し、レーン中心から自車位置までの距離を出力すればよいが、必ずしもこれに限定するものではない。
コンピュータ20は、CPUと、RAMと、後述するドライバ状態推定処理ルーチンを実行するためのプログラムを記憶したROMとを備え、機能的には次に示すように構成されている。コンピュータ20は、レーン位置センサ12から連続して出力されたレーン位置信号を取得して、FIFO型の信号バッファ(図示省略)に格納する信号取得部24と、信号バッファを一定の区間幅に分割し、各区間における値が最大となるレーン位置信号を抽出して区間最大値バッファ(図示省略)に格納する信号抽出部26と、抽出された区間最大値となるレーン位置信号の値から、区間最大値の増加に応じて確率が減少するように定めた関数であって、一般極値分布を表わす確率分布関数を決定するパラメータの組を推定する分布パラメータ推定部28と、推定されたパラメータの組に基づく一般極値分布の確率分布関数から、事故発生リスクとして、レーン中心からの距離がレーン逸脱に相当する閾値を越える確率(逸脱確率)を推定する逸脱確率推定部30と、車速センサ18によって検出された車速、GPS14から得られる自車両の位置、及びナビゲーションシステム16から得られる道路地図データに基づいて、所定時間後の自車両の位置の道路形状を推定する道路形状推定部32と、逸脱確率推定部30によって推定された逸脱確率及び前回以前に推定された逸脱確率から得られる逸脱確率の傾向に基づいて、所定時間後の逸脱確率を予測する逸脱確率予測部34と、道路形状推定部32によって推定された所定時間後の位置の道路形状に応じて、予測された逸脱確率に対して重み付けを行うと共に、重み付けされた逸脱確率の予測値に基づいて、ドライバが運転不適状態であるか否かを推定し、警報装置22に警報を出力させる不適運転推定部36とを備えている。
信号取得部24は、図2(A)に示すように、レーン中心からの距離を示すレーン位置信号の測定期間T分の時系列データを信号バッファに格納する。
信号抽出部26は、区画の時間幅w(<T)を示す信号バッファのインデックスを用いて、信号バッファを一定の時間幅wの区間に分割し、区間単位で信号バッファ全体を走査して、図2(B)に示すように、各区間において値が最大となるレーン位置信号の値を区間最大値として抽出して、区間最大値の時系列データを区間最大値バッファに格納する。
分布パラメータ推定部28は、パラメータの初期値を設定し、また、区間最大値バッファの値から区間最大値のヒストグラムを求め、区間最大値のヒストグラムから一般極値分布の対数尤度関数が最大となるようなパラメータの組(μ、σ、ξ)を求めて、図2(C)に示すような一般極値分布を表わす確率分布関数を決定するパラメータの組(μ、σ、ξ)を推定する。なお、パラメータμは、一般極値分布を表わす確率分布関数を示す曲線の平行移動を決定するパラメータであり、パラメータσは、一般極値分布を表わす確率分布関数を示す曲線の左右方向の圧縮度合いを決定するパラメータである。また、パラメータξは、一般極値分布を表わす確率分布関数を示す曲線の右下がり度合い(傾き)を決定する形状パラメータであり、レーン位置の値の増加に応じて確率が減少する度合いを示している。
ここで、一般極値分布を表わす確率分布関数は、以下の(1)式で表される。

ここで、zは、レーン位置の値(レーン中心からの距離)である。
また、パラメータの初期値として、以下の(2)式で得られる値を用いる。
また、一般極値分布の対数尤度関数l(μ、σ、ξ)は、以下の(3)式で表わされる。
ここで、nは、区間最大値バッファのバッファ長(区間数)を表わし、ziは、区間最大値バッファにおけるインデックスiの値を表す。また、Γ(・)は、ガンマ関数を表わす。
ここで、本実施の形態における逸脱確率を推定する原理について説明する。区間最大値の分布は一般極値分布に収束する。また、車両の走行状態を示す物理量の極値統計量が、一般極値分布から生成されるというモデルをおいた場合、将来の事故発生リスクが、一般極値分布の閾値以上の積分区間における確率値として計算される。
そこで、本実施の形態では、逸脱確率推定部30によって、図2(D)に示すように、推定されたパラメータの組によって決定される一般極値分布を表わす確率分布関数から、レーン中心から自車位置までの距離が、レーン逸脱に相当する所定距離(例えば、レーン端までの距離)以上となる確率を算出し、逸脱確率の推定値とする。逸脱確率推定部30では、推定されたパラメータの組によって決定された確率分布関数において、レーン中心からの距離がレーン端までの距離d以上となる区間を積分して得られる確率値c(d)を、以下の(4)式に従って算出し、算出された確率を逸脱確率の推定値とする。
道路形状推定部32は、GPS14から自車両の位置を取得し、車速センサ18より検出された車速と取得した現在の自車両の位置に基づいて、u秒後の自車両の位置を算出する。また、道路形状推定部32は、ナビゲーションシステム16から道路地図情報から、算出されたu秒後の自車両の位置の道路形状を取得して、u秒後の自車両の位置の道路形状を推定する。なお、上記のu秒について、実験的又は統計的に、将来の事故発生を前もって警報するタイミングとして適切な時間を求めておき、求められた時間をu秒として予め設定しておけばよい。
逸脱確率予測部34は、以下に説明するように、u秒後における逸脱確率を予測する。まず、u秒後の予測を行うために、図3(B)に示すように、推定された逸脱確率を時系列で記録した所定期間分のデータから、以下の(5)式で示す直線で近似して、逸脱確率が上昇傾向であるか下降傾向であるかを推定する。
ただし、isSafe(X)は、時刻Xにおける逸脱確率を表わし、α,βは、直線当てはめの係数を表わしている。
そして、X=tを現時刻として、上記図3(B)に示すように、近似された(5)式の直線に従って、u秒後の時刻X=t+uにおける逸脱確率を予測する。
不適運転推定部36は、以下の(6)式に示すように、推定された所定時間後の道路形状が曲線路であるか否かに応じた設定された重み係数γを、予測された逸脱確率isSafe(t+u)に乗算して、重み付けを行う。
ここで、推定されたu秒後の道路形状が直線路である場合に対応して、重み係数γの値が1に設定されており、推定されたu秒後の道路形状が曲線路である場合に対応して、1より大きい値が重み係数γの値として設定されている。また、曲線路の曲率rが小さいほど、重み係数γの値が大きくなるように設定されている。
これによって、図3(C)に示すように、推定されたu秒後の道路形状が曲線路である場合には、重み付けされた逸脱確率が大きい値となる。なお、上記図3(C)は、曲線路であるか直線路であるかをグラフで表したものであり、水平な直線部分は直線路を表わし、斜辺部分は曲線路を表している。
また、不適運転推定部36は、重み付けされた逸脱確率が閾値より大きい場合、ドライバが運転不適状態であると判断し、警報装置22によってドライバに対して警告を出力させる。
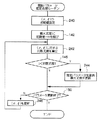
次に、第1の実施の形態に係るドライバ状態推定装置10の作用について説明する。ドライバ状態推定装置10を搭載した車両の走行中に、コンピュータ20において、図4に示すドライバ状態推定処理ルーチンが実行される。
まず、ステップ100において、レーン位置センサ12から連続して出力されるレーン位置信号を取得し、測定期間のレーン位置信号の時系列データを信号バッファに格納する。
そして、ステップ102において、信号バッファに格納されたレーン位置信号の時系列データから各区間の区間最大値を抽出する。上記ステップ102は、図5に示す区間最大値抽出処理ルーチンによって実現される。まず、ステップ120において、区間最大値バッファをクリアし、ステップ122において、信号バッファのインデックスt1を初期値である0にセットし、信号バッファのインデックスt2を区間の時間幅に対応する値にセットする。
そして、ステップ124において、信号バッファの区間[t1、t2]の最大値を抽出して、区間最大値バッファに格納する。次のステップ126では、インデックスt1、t2の各々に対して、区間の時間幅に対応する値を加算し、抽出対象区間を次の区間に設定する。そして、ステップ128において、インデックスt2が信号バッファ幅より大きいか否かを判定する。
上記ステップ128において、インデックスt2が信号バッファ幅以下であって、信号バッファのすべての区間から区間最大値を抽出していない場合には、ステップ124へ戻るが、一方、信号バッファのすべての区間から区間最大値を抽出し、インデックスt2が信号バッファ幅より大きくなっている場合には、区間最大値抽出処理ルーチンを終了する。
そして、ドライバ状態推定処理ルーチンのステップ104において、一般極値分布を表わす関数を決定するパラメータの組を推定する。上記ステップ104は、図6に示す関数パラメータ推定処理ルーチンによって実現される。まず、ステップ140において、上記(2)式で表される値を、一般極値分布を表わす関数を決定するパラメータの組(μ、σ、ξ)の候補の初期値として設定し、ステップ142において、最大尤度lに、初期値として−∞を設定する。
そして、ステップ144において、上記(3)式で表される対数尤度関数に従って、パラメータの組(μ、σ、ξ)の候補に対する対数尤度を算出し、次のステップ146において、上記ステップ144で算出された対数尤度が、最大尤度lより大きいか否かを判定する。上記ステップ146において、算出された対数尤度が、最大尤度以下である場合には、ステップ150へ移行するが、算出された対数尤度が、最大尤度より大きい場合には、ステップ148において、現在のパラメータの組(μ、σ、ξ)の候補を、推定されるパラメータの組として更新し、上記ステップ144で算出された対数尤度を、最大尤度として更新して、ステップ150へ移行する。
ステップ150では、パラメータ更新を終了するか否かを判定し、パラメータ更新の終了条件に合致した場合には、関数パラメータ推定処理ルーチンを終了する。一方、上記ステップ150で、パラメータ更新の終了条件に合致しなかった場合には、ステップ152において、パラメータの組(μ、σ、ξ)の候補を、所定の更新規則に基づいて更新し、ステップ144へ戻る。
そして、ドライバ状態推定処理ルーチンのステップ106において、上記ステップ104で推定されたパラメータの組によって決定される確率分布関数に基づいて、逸脱確率を算出する。上記ステップ106では、確率分布関数において、レーン中心からの距離(レーン位置)がレーン端までの距離d以上となる区間を積分して得られる確率値c(d)を、上記の(4)式に従って算出し、事故につながるレーン逸脱が発生する逸脱確率を求める。
次のステップ108では、上記ステップ106で算出された逸脱確率と、前回以前に算出された逸脱確率の所定期間分の時系列データとに基づいて、逸脱確率の遷移を上記(5)式で表される直線で近似して、逸脱確率の傾向を推定する。
そして、ステップ110で、上記ステップ108で近似された直線に従って、u秒後の逸脱確率を予測する。次のステップ112では、GPS14から、自車両の現在位置を取得し、ステップ114において、車速センサ18により検出される車速に基づいて、u秒後の自車両の位置を算出する。
そして、ステップ116において、ナビゲーションシステム16から得られる道路地図データから、上記ステップ114で算出されたu秒後の自車両の位置の道路形状を取得すると共に、取得した道路形状が曲線路である場合には、曲線路の曲率rを算出する。
次のステップ117では、上記ステップ116で取得したu秒後の自車両の位置の道路形状に応じて定められた重み係数を、上記ステップ110で予測された逸脱確率に乗算して、重み付けを行う。
そして、ステップ118において、上記ステップ117で重み付けされた逸脱確率の予測値が、閾値より大きいか否かを判定する。なお、上記の閾値については、実験的又は統計的に、レーン逸脱による事故が発生する場合における逸脱確率を求めておき、求められた逸脱確率に基づいて閾値を設定しておけばよい。上記ステップ118で、重み付けされた逸脱確率の予測値が閾値以下である場合には、ドライバが運転不適状態でないと判断し、ステップ100へ戻る。一方、上記ステップ118で、重み付けされた逸脱確率が閾値より大きい場合には、ドライバが運転不適状態であると判断し、ステップ119において、警報装置22によってドライバに対して警報を出力させて、ステップ100へ戻る。
以上説明したように、第1の実施の形態に係るドライバ状態推定装置によれば、算出された逸脱確率の遷移を近似した直線に従って、所定時間後の逸脱確率を適切に予測して、ドライバの運転適否状態を推定することにより、前もってドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができる。また、曲線路においてレーン逸脱行為が生じやすいという特性をもとに、所定時間後の自車両位置の道路形状が、曲線路であるか否かを更に考慮することにより、前もってドライバが運転不適状態になるか否かを精度よく推定でき、将来の事故発生を防ぐことができる。
また、レーン位置信号の区間最大値から、一般極値分布を表わす確率分布関数を決定するパラメータを推定し、推定されたパラメータによって決定される確率分布関数から、逸脱確率を算出して、ドライバの運転適否状態を推定することにより、ドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができる。
また、レーン位置信号の区間最大値から推定される分布パラメータから算出される逸脱確率の遷移の変化自体が緩やかであっても、逸脱確率の遷移を直線で近似して逸脱確率の傾向を推定し、将来的に逸脱確率がどのように変化するかを考慮に入れることによって、前もってドライバが運転不適状態になるか否かを推定することができる。
また、レーン位置信号の値の時系列データから、各区間の区間最大値を抽出して、一般極致分布の確率分布関数を決定するパラメータを推定し、確率分布関数に基づいて、将来事故につながる予兆として、そのリスクを見積もることによって、例えば車線を逸脱する前に警報を出力することが出来る。
次に、第2の実施の形態について説明する。なお、第2の実施の形態に係るドライバ状態推定装置は、第1の実施の形態と同様の構成であるため、同一符号を付して説明を省略する。
第2の実施の形態では、一般パレート分布を表わす確率分布関数を決定するパラメータを推定し、推定されたパラメータによって決定される一般パレート分布の確率分布関数から、逸脱確率を求めている点が、第1の実施の形態と主に異なっている。
上記の第1の実施の形態では、区間最大値に基づいてパラメータを推定していたが、精度の高いパラメータ推定には十分なデータが必要になる。すなわちデータ数を増やすためには、区間幅を小さくするか、または信号バッファのサイズを拡大して、区間数を増やす必要がある。本実施の形態では、ある一定水準の閾値を超過したデータの極値分布を求めることによって、精度の高いパラメータ推定を行う。
第2の実施の形態に係るドライバ状態推定装置では、信号抽出部26によって、図7(A)に示すような信号バッファの時系列データから、図7(B)に示すように、閾値以上の信号値の系列を抽出して、抽出した信号値から閾値を減じた値を、水準超過値として水準超過バッファに格納する。
分布パラメータ推定部28は、パラメータの初期値を設定し、水準超過バッファの値から、一般パレート分布の対数尤度関数が最大となるようなパラメータの組(σ、ξ)を求め、図7(C)に示すような一般パレート分布を表わす確率分布関数を決定するパラメータの組(σ、ξ)を推定する。なお、パラメータσは、関数の曲線の左右方向の圧縮度合いを決定するパラメータであり、パラメータξは、関数の曲線の右下がり度合い(傾き)を決定する形状パラメータであり、レーン位置の値の増加に応じて確率が減少する度合いを示している。
ここで、一般パレート分布を表わす確率分布関数は、以下の(7)式で表される。
ここで、zは、レーン位置の値(レーン中心からの距離に対して閾値を減じた値)である。
また、パラメータの初期値として、以下の(8)式で得られる値を用いる。
また、一般パレート分布の対数尤度関数l(σ、ξ)は、以下の(9)式で表わされる。
ここで、nは、水準超過バッファのバッファ長を表わし、ziは、水準超過バッファにおけるインデックスiの値を表す。
ここで、本実施の形態における逸脱確率を推定する原理について説明する。水準超過データの分布は一般パレート分布に収束する。また、車両の走行状態を示す物理量の極値統計量が、一般パレート分布から生成されるというモデルをおいた場合、将来の事故発生リスクが、一般パレート分布の閾値以上の積分区間における確率値として計算される。
そこで、本実施の形態では、逸脱確率推定部30によって、図7(D)に示すように、推定されたパラメータの組によって決定される一般パレート分布を表わす確率分布関数から、レーン中心からの自車位置までの距離が、レーン逸脱に相当する所定距離(例えば、レーン端までの距離)以上となる逸脱確率を算出し、逸脱確率の推定値とする。逸脱確率推定部30では、推定されたパラメータの組によって決定された確率分布関数において、レーン中心からの距離がレーン端までの距離d以上となる区間を積分して得られる確率値c(d)を、以下の(10)式に従って算出し、算出された確率を逸脱確率の推定値とする。
次に、第2の実施の形態に係るドライバ状態推定処理ルーチンについて図8を用いて説明する。なお、第1の実施の形態と同様の処理については、同一符号を付して説明を省略する。
まず、ステップ100において、レーン位置センサ12からレーン位置信号を取得し、レーン位置信号の時系列データを信号バッファに格納する。そして、ステップ200において、信号バッファに格納されたレーン位置信号の時系列データから水準超過データを抽出する。上記ステップ200は、図9に示す水準超過データ抽出処理ルーチンによって実現される。まず、ステップ220において、水準超過バッファをクリアし、ステップ222において、信号バッファのインデックスtを初期値である0にセットする。
そして、ステップ224において、信号バッファのインデックスtのレーン位置信号の値が、閾値以上であるか否かを判定する。なお、閾値には、例えば、レーン中心からレーン端までの距離の半分の値を設定しておけばよく、これに限定されるものではない。
上記ステップ224で、信号バッファのインデックスtのレーン位置信号の値が、閾値未満である場合には、水準を超過していないと判断し、レーン位置信号の値を抽出せずに、ステップ228へ移行する。一方、上記ステップ224で、信号バッファのインデックスtのレーン位置信号の値が、閾値以上である場合、ステップ226において、信号バッファのインデックスtのレーン位置信号の値を抽出し、抽出したレーン位置信号の値から閾値を引いた値を、区間最大値バッファに格納して、ステップ228へ移行する。
ステップ228では、インデックスtが信号バッファ幅より大きいか否かを判定する。上記ステップ228において、インデックスtが信号バッファ幅以下であって、信号バッファのすべての値を走査していない場合には、ステップ224へ戻るが、一方、信号バッファのすべての値を走査し、インデックスtが信号バッファ幅より大きくなっている場合には、水準超過データ抽出処理ルーチンを終了する。
そして、ドライバ状態推定処理ルーチンのステップ202において、一般パレート分布を表わす関数を決定するパラメータの組を推定する。上記ステップ202は、図10に示す関数パラメータ推定処理ルーチンによって実現される。まず、ステップ240において、上記(8)式で表される値を、一般パレート分布を表わす関数を決定するパラメータの組(σ、ξ)候補の初期値として設定し、ステップ142において、最大尤度lに、初期値として−∞を設定する。
そして、ステップ242において、上記(9)式で表される対数尤度関数に従って、パラメータの組(σ、ξ)の候補に対する対数尤度を算出し、次のステップ146において、算出された対数尤度が、最大尤度lより大きいか否かを判定する。上記ステップ146において、算出された対数尤度が、最大尤度以下である場合には、ステップ150へ移行するが、算出された対数尤度が、最大尤度より大きい場合には、ステップ244において、現在のパラメータの組(σ、ξ)の候補を、推定されるパラメータの組として更新し、上記ステップ242で算出された対数尤度を、最大尤度として更新して、ステップ150へ移行する。
ステップ150では、パラメータ更新を終了するか否かを判定し、パラメータ更新の終了条件に合致した場合には、関数パラメータ推定処理ルーチンを終了する。一方、上記ステップ150で、パラメータ更新の終了条件に合致しなかった場合には、ステップ246において、パラメータの組(σ、ξ)の候補を、所定の更新規則に基づいて更新し、ステップ242へ戻る。
そして、ドライバ状態推定処理ルーチンのステップ204において、上記ステップ202で推定されたパラメータの組によって決定される確率分布関数に基づいて、逸脱確率を算出する。上記ステップ204では、確率分布関数において、レーン中心からの距離(レーン位置)がレーン端までの距離d以上となる区間を積分して得られる確率値c(d)を、上記の(10)式に従って算出し、事故につながるレーン逸脱が発生する逸脱確率を求める。
次のステップ108では、上記ステップ204で算出された逸脱確率と、前回以前に算出された逸脱確率の所定期間分の時系列データとに基づいて、逸脱確率の遷移を上記(5)式で表される直線で近似する。
そして、ステップ110で、u秒後の逸脱確率を予測し、次のステップ112では、GPS14から、自車両の現在位置を取得し、ステップ114において、車速センサ18により検出される車速に基づいて、u秒後の自車両の位置を算出する。
そして、ステップ116において、ナビゲーションシステム16から得られる道路地図情報から、u秒後の自車両の位置の道路形状を取得して、u秒後の自車両の位置の道路形状を推定すると共に、取得した道路形状が曲線路である場合には、曲線路の曲率rを算出する。
次のステップ117では、u秒後の自車両の位置の道路形状に応じて定められた重み係数を、上記ステップ110で予測された逸脱確率に乗算して、重み付けを行い、ステップ118において、上記ステップ117で重み付けされた逸脱確率の予測値が、閾値より大きいか否かを判定する。
上記ステップ118で、重み付けされた逸脱確率の予測値が閾値以下である場合には、ドライバが運転不適状態でないと判断し、ステップ100へ戻る。一方、上記ステップ118で、重み付けされた逸脱確率が閾値より大きい場合には、ドライバが運転不適状態であると判断し、ステップ119において、警報装置22によってドライバに対して警報を出力させて、ステップ100へ戻る。
以上説明したように、第2の実施の形態に係るドライバ状態推定装置によれば、レーン位置信号の水準超過値から、一般パレート分布を表わす確率分布関数を決定するパラメータを推定し、推定されたパラメータによって決定される確率分布関数から、逸脱確率を算出して、ドライバの運転適否状態を推定することにより、ドライバが運転不適状態になるか否かを推定でき、将来の事故発生を防ぐことができる。
また、レーン位置信号の水準超過値から推定される分布パラメータから算出される逸脱確率の遷移の変化自体が緩やかであっても、逸脱確率の遷移を直線で近似して逸脱確率の傾向を推定し、将来的に逸脱確率がどのように変化するかを考慮に入れることによって、前もってドライバが運転不適状態になるか否かを推定することができる。
なお、上記の実施の形態では、一般パレート分布を表わす確率分布関数を決定するパラメータを推定する場合を例に説明したが、これに限定されるものではなく、一般パレート分布の特性を近似的に計算した指数分布を表わす確率分布関数を決定するパラメータを推定するようにしてもよい。この場合には、推定されたパラメータによって決定される指数分布を表わす確率分布関数から、逸脱確率を算出して、ドライバの運転適否状態を推定すればよい。
次に、第3の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については同一符号を付して説明を省略する。
第3の実施の形態では、信号バッファの時系列データの全ての信号値を用いて、確率分布関数を決定するパラメータの組を推定し、逸脱確率を算出している点が、第2の実施の形態と異なっている。
図11に示すように、第3の実施の形態に係るドライバ状態推定装置310のコンピュータ320では、分布パラメータ推定部328によって、パラメータの初期値を設定し、上記図7(A)に示すような、レーン位置信号の測定期間T分の時系列データを格納した信号バッファの全ての値から、一般パレート分布の対数尤度関数が最大となるようなパラメータの組(σ、ξ)を求め、上記図7(C)に示すような一般パレート分布を表わす確率分布関数を決定するパラメータの組(σ、ξ)を推定する。
また、逸脱確率推定部30によって、上記図7(D)に示すように、推定されたパラメータの組によって決定される一般パレート分布を表わす確率分布関数から、上記第2の実施の形態と同様に、レーン中心からの自車位置までの距離が、レーン逸脱に相当する所定距離(例えば、レーン端までの距離)以上となる逸脱確率を算出し、逸脱確率の推定値とする。
なお、第3の実施の形態に係るドライバ状態推定装置310の他の構成及び作用については、第2の実施の形態と同様であるため、説明を省略する。
なお、上記の第1の実施の形態〜第3の実施の形態では、レーン位置として、レーン中心からの距離を示す値を検出している場合を例に説明したが、これに限定されるものではなく、基準位置としてのレーンの端(白線)からレーン上の自車両位置までの距離を示す値を、レーン位置として検出するようにしてもよい。この場合には、レーン位置が、レーン逸脱に相当する所定距離(例えば、0)以下となる確率を、逸脱確率として算出すればよい。
次に、第4の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
第4の実施の形態では、ドライバの瞬目波形から、居眠り運転状態であるか否かを推定している点が、第1の実施の形態と異なっている。
図12に示すように、第4の実施の形態に係るドライバ状態推定装置410は、ドライバの心身状態としての眼の開度を連続して検出して瞬目波形を出力する瞬き検出器412と、瞬目波形から眠気の指標となる瞬目率(例えば、単位時間に対する閉眼時間の割合(PERCLOS))の時系列データを計算する瞬目率計算器413と、瞬目率計算器413からの出力に基づいて、ドライバが運転不適状態としての居眠り運転状態であるか否かを推定し、推定結果に応じて、警報装置22によってドライバに対して警報を出力させるコンピュータ420とを備えている。
瞬き検出器412は、例えばビデオカメラを備え、ビデオカメラで眼球周辺の撮像画像を取得し、取得した動画像データから開眼度の時系列データを検出して、開眼度の時系列データを出力する。なお、開眼時の開眼度を100とし、閉眼時の開眼度を0とする。
瞬目率計算器413は、眠気の指標として用いられるPERCLOSを計算して、PERCLOSを示す瞬目率信号を出力する。PERCLOSは、単位時間当たりの閉眼状態(虹彩が20%以上隠れる状態)が占める割合を表わしたもので、PERCLOSの値が大きいほど、ドライバは眠気を催しており、リスクとしての眠気度合いが高くなる。図13に示すように、開眼度が20%以下の時間割合、すなわち(t1+t2+t3)/Tが、単位時間TにおけるPERCLOSの値として計算される。
コンピュータ420は、瞬目率計算器413から出力されたPERCLOSの時系列データを取得して、FIFO型の信号バッファ(図示省略)に格納する信号取得部424と、信号抽出部26と、分布パラメータ推定部28と、推定されたパラメータの組に基づく一般極値分布の確率分布関数から、閉眼時間が居眠り状態に相当する所定の長時間以上となる確率を示す居眠り確率を推定する居眠り確率推定部430と、居眠り確率推定部430によって推定された居眠り確率及び前回以前に推定された居眠り確率から得られる居眠り確率の傾向に基づいて、所定時間後の居眠り確率を予測する居眠り確率予測部434と、予測された居眠り確率に基づいて、ドライバが居眠り運転状態であるか否かを推定し、警報装置22に警報を出力させる居眠り運転推定部436とを備えている。
信号取得部424は、PERCLOSを示す瞬目率信号の測定期間T分の時系列データを信号バッファに格納する。
居眠り確率推定部430は、分布パラメータ推定部28によって推定されたパラメータの組によって決定される一般極値分布を表わす確率分布関数から、閉眼時間が居眠り状態に相当する所定の長時間以上となる確率を算出し、居眠り確率の推定値とする。居眠り確率推定部430では、推定されたパラメータの組によって決定された確率分布関数において、閉眼時間が、居眠り状態に相当する所定の長時間d以上となる区間を積分して得られる確率値c(d)を、上記(4)式に従って算出し、算出された確率を、居眠り確率の推定値とする。
居眠り確率予測部434は、推定された居眠り確率を時系列で記録した所定期間分のデータから、上記(5)式で示す直線で近似して、居眠り確率が上昇傾向であるか又は下降傾向であるかを推定し、近似された直線に従って、u秒後の居眠り確率を予測する。
居眠り運転推定部436は、予測された居眠り確率が閾値より大きい場合、ドライバが居眠り運転状態であると判断し、警報装置22によってドライバに対して警告を出力させる。
次に、第4の実施の形態に係るドライバ状態推定処理ルーチンについて図14を用いて説明する。なお、第1の実施の形態と同様の処理については、同一符号を付して詳細な説明を省略する。
まず、ステップ450において、瞬目率計算器413から連続して出力されるPERCLOSを示す瞬目率信号を取得し、測定期間の瞬目率信号の時系列データを信号バッファに格納する。
そして、ステップ102において、信号バッファに格納された瞬目率信号の時系列データから各区間の区間最大値を抽出し、ステップ104において、一般極値分布を表わす確率分布関数を決定するパラメータの組を推定する。
次のステップ452では、上記ステップ104で推定されたパラメータの組によって決定される確率分布関数に基づいて、閉眼時間が居眠り状態に相当する所定の長時間以上となる確率を示す居眠り確率を算出する。上記ステップ452では、確率分布関数において、閉眼時間が所定の長時間d以上となる区間を積分して得られる確率値c(d)を、上記(4)式に従って算出し、居眠り確率の推定値を求める。
次のステップ454では、上記ステップ452で算出された居眠り確率と、前回以前に算出された居眠り確率の所定期間分の時系列データとに基づいて、居眠り確率の遷移を上記(5)式で表される直線で近似する。
そして、ステップ456で、上記ステップ454で近似された直線に従って、u秒後の居眠り確率を予測し、ステップ458において、上記ステップ456で予測された居眠り確率が、閾値より大きいか否かを判定する。なお、上記の閾値については、実験的又は統計的に、居眠りしている場合における、閉眼時間が所定の長時間以上となる確率を求めておき、求められた確率に基づいて閾値を設定しておけばよい。上記ステップ458で、予測された居眠り確率が閾値以下である場合には、ドライバが居眠り運転状態でないと判断し、ステップ100へ戻る。一方、上記ステップ458で、予測された居眠り確率が閾値より大きい場合には、ドライバが居眠り運転状態であると判断し、ステップ119において、警報装置22によってドライバに対して警報を出力させて、ステップ100へ戻る。
以上説明したように、第4の実施の形態に係るドライバ状態推定装置によれば、算出された居眠り確率の遷移を近似した直線に従って、所定時間後の居眠り確率を適切に予測して、ドライバの運転適否状態を推定することにより、前もってドライバが居眠り運転状態になるか否かを推定でき、将来の事故発生を防ぐことができる。
また、瞬目率信号の区間最大値から、一般極値分布を表わす確率分布関数を決定するパラメータを推定し、推定されたパラメータによって決定される確率分布関数から、居眠り状態に相当する閉眼時間以上となる確率を居眠り確率として算出して、ドライバの居眠り運転状態を推定することにより、ドライバが居眠り運転状態になるか否かを推定でき、将来の事故発生を防ぐことができる。
なお、上記の実施の形態では、瞬目率信号の区間最大値から、一般極値分布を表わす確率分布関数を決定するパラメータを推定する場合を例に説明したが、これに限定されるものではなく、瞬目率信号の水準超過値から、一般パレート分布を表わす確率分布関数を決定するパラメータを推定するようにしてもよい。この場合、推定されたパラメータによって決定される確率分布関数から、居眠り状態に相当する閉眼時間以上となる確率を居眠り確率として算出して、ドライバの居眠り運転状態を推定してもよい。
また、上記の第1の実施の形態〜第3の実施の形態では、自車両の走行状態を示す物理量としてレーン位置を検出する場合を例に説明したが、これに限定するものではなく、自車両の走行状態を示す物理量として、横方向加速度、ヨーレート、操舵角、車速、車間距離、前後方向加速度、又は相対車速を検出してもよく、また、ドライバの操作状態を示す物理量として、ブレーキ操作量又はアクセル操作量を検出するようにしてもよい。この場合にも、上記の実施の形態と同様に、ドライバの運転適否状態を推定することができる。また、例えば、車間距離のように、値が小さいほどリスクが高くなる物理量に対しては、信号値の逆数を用いるか、十分大きな値からの差分を用いることによって、上記の実施の形態と同様に、定式化することができる。
また、信号値を直接用いるのではなく、操舵角の標準偏差など、事故に関連の深い統計量に変換し、統計量の時系列データから、上記の実施の形態と同様に、ドライバの運転適否状態を推定することができる。
さらに、車間距離及び相対車速から、TTC(Time−To−Collision)に変換した上で、上記の実施の形態と同様の手法を適用したり、相対車速から相対加速度に変換した上で、同様の手法を適用しても、ドライバの運転適否状態を推定することが出来る。
また、1種類の物理量を検出した場合を例に説明したが、これに限定されるものではなく、複数種類の物理量の組み合わせを検出し、複数種類の物理量の時系列データから、ドライバの運転適否状態を推定してもよい。また、ドライバの操作状態を示す物理量、走行状態を示す物理量、及び心身状態を示す物理量の組み合わせを検出し、これらの物理量の組み合わせから、ドライバの運転適否状態を推定してもよい。
また、上記の実施の形態では、ドライバの運転適否状態が、運転不適状態であるかを推定する場合を例に説明したが、これに限定されるものではなく、ドライバの運転適否状態が、正常運転状態であるか否かを推定するようにしてもよい。
また、確率分布関数を用いた場合を例に説明したが、これに限定されるものではなく、頻度を示す分布関数を用いてもよい。
10、310、410 ドライバ状態推定装置
12 レーン位置センサ
16 ナビゲーションシステム
20、320、420 コンピュータ
26 信号抽出部
28、328 分布パラメータ推定部
30 逸脱確率推定部
32 道路形状推定部
34 逸脱確率予測部
36 不適運転推定部
412 瞬き検出器
413 瞬目率計算器
430 居眠り確率推定部
434 居眠り確率予測部
436 居眠り運転推定部
12 レーン位置センサ
16 ナビゲーションシステム
20、320、420 コンピュータ
26 信号抽出部
28、328 分布パラメータ推定部
30 逸脱確率推定部
32 道路形状推定部
34 逸脱確率予測部
36 不適運転推定部
412 瞬き検出器
413 瞬目率計算器
430 居眠り確率推定部
434 居眠り確率予測部
436 居眠り運転推定部
Claims (7)
- 自車両の走行状態、ドライバが自車両を操作したときの操作状態、及びドライバの心身状態の少なくとも一つを示す物理量を検出し、前記物理量の時系列データを出力する検出手段と、
前記検出手段により出力された前記物理量の時系列データから、前記物理量が所定値以上となる確率及び所定値以下となる確率の何れか一方を示す不適確率を算出する確率算出手段と、
前記確率算出手段によって算出された前記不適確率の傾向に基づいて、所定時間後の前記不適確率を予測する確率予測手段と、
前記確率予測手段によって予測された前記不適確率に基づいて、前記ドライバの運転適否状態を推定するドライバ状態推定手段と、
を含むドライバ状態推定装置。 - 道路地図情報から、前記所定時間後に自車両が走行している位置の道路形状を取得する道路形状取得手段を更に含み、
前記検出手段は、基準位置を基準とした自車両が走行しているレーン上の位置を示すレーン位置を前記物理量として検出し、
前記確率算出手段は、前記所定値をレーン逸脱に相当する値として、前記不適確率を算出し、
前記ドライバ状態推定手段は、前記確率予測手段によって予測された前記不適確率、及び前記道路形状取得手段によって取得された道路形状が曲線路であるか否かに基づいて、前記ドライバの運転適否状態を推定する請求項1記載のドライバ状態推定装置。 - 前記検出手段は、リスクが高くなるに従って大きくなる前記物理量を検出し、
前記確率算出手段は、前記検出手段により出力された前記物理量の時系列データから、閾値以上の物理量及び所定区間毎の値が最大となる物理量の何れか一方を抽出する抽出手段と、前記抽出手段によって抽出された物理量に基づいて、前記物理量の値の増加に応じて該物理量となる頻度又は確率が減少するように定めた関数を決定するパラメータを推定する関数推定手段とを備え、前記関数推定手段によって推定されたパラメータによって決定される前記関数における、前記物理量が前記所定値以上となる頻度又は確率に基づいて、前記不適確率を算出する請求項1又は2記載のドライバ状態推定装置。 - 前記抽出手段は、前記検出手段により出力された前記物理量の時系列データから、所定区間毎の値が最大となる物理量を抽出し、
前記関数推定手段は、前記抽出された物理量に基づいて、一般極値分布を表わす前記関数を決定するパラメータを推定する請求項3記載のドライバ状態推定装置。 - 前記抽出手段は、前記検出手段により出力された前記物理量の時系列データから、閾値以上の物理量を抽出し、
前記関数推定手段は、前記抽出された物理量に基づいて、一般パレート分布を表わす前記関数を決定するパラメータを推定する請求項3記載のドライバ状態推定装置。 - 前記抽出手段は、前記検出手段により出力された前記物理量の時系列データから、閾値以上の物理量を抽出し、
前記関数推定手段は、前記抽出された物理量に基づいて、指数分布を表わす前記関数を決定するパラメータを推定する請求項3記載のドライバ状態推定装置。 - コンピュータを、
自車両の走行状態、ドライバが自車両を操作したときの操作状態、及びドライバの心身状態の少なくとも一つを示す物理量を検出し、前記物理量の時系列データを出力する検出手段により出力された前記物理量の時系列データから、前記物理量が所定値以上となる確率及び所定値以下となる確率の何れか一方を示す不適確率を算出する確率算出手段、
前記確率算出手段によって算出された前記不適確率の傾向に基づいて、所定時間後の前記不適確率を予測する確率予測手段、及び
前記確率予測手段によって予測された前記不適確率に基づいて、前記ドライバの運転適否状態を推定するドライバ状態推定手段
として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008117368A JP2009266100A (ja) | 2008-04-28 | 2008-04-28 | ドライバ状態推定装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008117368A JP2009266100A (ja) | 2008-04-28 | 2008-04-28 | ドライバ状態推定装置及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009266100A true JP2009266100A (ja) | 2009-11-12 |
Family
ID=41391840
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008117368A Pending JP2009266100A (ja) | 2008-04-28 | 2008-04-28 | ドライバ状態推定装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009266100A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011167398A (ja) * | 2010-02-19 | 2011-09-01 | Toyota Motor Corp | 生体状態判定装置 |
| WO2017194241A1 (de) | 2016-05-10 | 2017-11-16 | Robert Bosch Gmbh | Verfahren zur steuerung von sprachgesteuerten bedienschnittstellen in kraftfahrzeugen und vorrichtung zur durchführung des verfahrens |
| CN109435959A (zh) * | 2018-10-24 | 2019-03-08 | 斑马网络技术有限公司 | 疲劳驾驶处理方法、车辆、存储介质及电子设备 |
| JP2020078728A (ja) * | 2015-07-22 | 2020-05-28 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 覚醒度予測方法および覚醒度予測装置 |
| CN114222987A (zh) * | 2019-08-23 | 2022-03-22 | 沃尔沃卡车集团 | 用于量化车辆路径跟随性能的方法 |
| CN114222689A (zh) * | 2019-08-23 | 2022-03-22 | 沃尔沃卡车集团 | 用于量化极端交通行为的方法 |
| CN115123292A (zh) * | 2022-06-06 | 2022-09-30 | 宁波均胜智能汽车技术研究院有限公司 | 极端场景数据采集方法及装置、智能车辆、可读存储介质 |
| CN115798207A (zh) * | 2022-11-14 | 2023-03-14 | 哈尔滨工业大学 | 基于LiDAR点云的信号交叉口追尾冲突识别方法 |
-
2008
- 2008-04-28 JP JP2008117368A patent/JP2009266100A/ja active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011167398A (ja) * | 2010-02-19 | 2011-09-01 | Toyota Motor Corp | 生体状態判定装置 |
| JP2020078728A (ja) * | 2015-07-22 | 2020-05-28 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 覚醒度予測方法および覚醒度予測装置 |
| WO2017194241A1 (de) | 2016-05-10 | 2017-11-16 | Robert Bosch Gmbh | Verfahren zur steuerung von sprachgesteuerten bedienschnittstellen in kraftfahrzeugen und vorrichtung zur durchführung des verfahrens |
| DE102016207975A1 (de) | 2016-05-10 | 2017-11-16 | Robert Bosch Gmbh | Verfahren zur Steuerung von sprachgesteuerten Bedienschnittstellen in Kraftfahrzeugen und Vorrichtung zur Durchführung des Verfahrens |
| CN109153329A (zh) * | 2016-05-10 | 2019-01-04 | 罗伯特·博世有限公司 | 用于控制机动车中的语音控制操作界面的方法和用于执行该方法的装置 |
| CN109435959A (zh) * | 2018-10-24 | 2019-03-08 | 斑马网络技术有限公司 | 疲劳驾驶处理方法、车辆、存储介质及电子设备 |
| CN114222987A (zh) * | 2019-08-23 | 2022-03-22 | 沃尔沃卡车集团 | 用于量化车辆路径跟随性能的方法 |
| CN114222689A (zh) * | 2019-08-23 | 2022-03-22 | 沃尔沃卡车集团 | 用于量化极端交通行为的方法 |
| CN114222689B (zh) * | 2019-08-23 | 2024-09-10 | 沃尔沃卡车集团 | 用于量化极端交通行为的方法 |
| CN114222987B (zh) * | 2019-08-23 | 2024-12-17 | 沃尔沃卡车集团 | 用于量化车辆路径跟随性能的方法 |
| US12258044B2 (en) | 2019-08-23 | 2025-03-25 | Volvo Truck Corporation | Method for quantifying extreme traffic behavior |
| CN115123292A (zh) * | 2022-06-06 | 2022-09-30 | 宁波均胜智能汽车技术研究院有限公司 | 极端场景数据采集方法及装置、智能车辆、可读存储介质 |
| CN115798207A (zh) * | 2022-11-14 | 2023-03-14 | 哈尔滨工业大学 | 基于LiDAR点云的信号交叉口追尾冲突识别方法 |
| CN115798207B (zh) * | 2022-11-14 | 2024-10-18 | 哈尔滨工业大学 | 基于LiDAR点云的信号交叉口追尾冲突识别方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8866896B2 (en) | Biological body state assessment device including drowsiness occurrence assessment | |
| JP2009266100A (ja) | ドライバ状態推定装置及びプログラム | |
| CN102316805B (zh) | 生理状态推测装置和车辆控制装置 | |
| JP2009146377A (ja) | ドライバ状態推定装置及びプログラム | |
| CN109716411B (zh) | 用以监测驾驶员的活动水平的方法和设备 | |
| JP4743137B2 (ja) | 眠気判定装置及びプログラム | |
| JP4886047B2 (ja) | 車両の運転評価装置、方法、及びコンピュータプログラム | |
| JP4529394B2 (ja) | ドライバの車両運転特性推定装置 | |
| KR20140147233A (ko) | 차량의 주행 패턴을 이용한 졸음 운전 판단 장치 및 방법 | |
| JP6707969B2 (ja) | 覚醒度判定装置 | |
| JP2018165070A (ja) | 乗員状態推定装置及び乗員状態推定方法 | |
| CN105374163B (zh) | 具有疲劳识别的驾驶员辅助系统和用于预见疲劳度的方法 | |
| JP2009175929A (ja) | ドライバ状態推定装置及びプログラム | |
| JP2012123642A (ja) | 画像識別装置及びプログラム | |
| JP2012128739A (ja) | 衝突危険判定装置及びプログラム | |
| JP2010128669A (ja) | 運転支援装置及びプログラム | |
| CN118247775A (zh) | 基于摄像机的智能疲劳驾驶监测预警方法及系统 | |
| CN116416756A (zh) | 疲劳驾驶预警方法、装置、设备及计算机可读存储介质 | |
| JP2009145951A (ja) | ドライバ状態推定装置及びプログラム | |
| JP6273994B2 (ja) | 車両用報知装置 | |
| JP2010184067A (ja) | 生体状態推定装置 | |
| CN113044044A (zh) | 驾驶员状态估计装置和驾驶员状态估计方法 | |
| JP2008099884A (ja) | 状態推定装置 | |
| JP4923522B2 (ja) | 運転者心理判定装置 | |
| JP4486897B2 (ja) | 運転行動認識装置 |