JP2009269596A - 航空機着陸装置用操向システム - Google Patents
航空機着陸装置用操向システム Download PDFInfo
- Publication number
- JP2009269596A JP2009269596A JP2009108605A JP2009108605A JP2009269596A JP 2009269596 A JP2009269596 A JP 2009269596A JP 2009108605 A JP2009108605 A JP 2009108605A JP 2009108605 A JP2009108605 A JP 2009108605A JP 2009269596 A JP2009269596 A JP 2009269596A
- Authority
- JP
- Japan
- Prior art keywords
- landing gear
- steering system
- harmonic drive
- drive mechanism
- rotating member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 64
- 238000000034 method Methods 0.000 claims description 15
- 230000008878 coupling Effects 0.000 claims description 7
- 238000010168 coupling process Methods 0.000 claims description 7
- 238000005859 coupling reaction Methods 0.000 claims description 7
- 230000003213 activating effect Effects 0.000 claims 1
- 230000004913 activation Effects 0.000 claims 1
- 239000000463 material Substances 0.000 description 4
- 241000353355 Oreosoma atlanticum Species 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 238000009420 retrofitting Methods 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 239000006096 absorbing agent Substances 0.000 description 1
- 235000013361 beverage Nutrition 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 210000005069 ears Anatomy 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/32—Alighting gear characterised by elements which contact the ground or similar surface
- B64C25/50—Steerable undercarriages; Shimmy-damping
- B64C25/505—Shimmy damping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D3/00—Steering gears
- B62D3/02—Steering gears mechanical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/32—Alighting gear characterised by elements which contact the ground or similar surface
- B64C25/50—Steerable undercarriages; Shimmy-damping
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Retarders (AREA)
- Power Steering Mechanism (AREA)
Abstract
【解決手段】本発明は一般に、ハーモニックドライブ機構260、360を介して着陸装置脚116、216、316に動作可能に結合される回転部材118、218、318を備える航空機着陸装置用操向システム110、210、310に関する。着陸装置用操向システム110、210、310は電動式でありうる。さらに、着陸装置システム110、210、310は、ハーモニックドライブ機構260、360が故障することがあれば安全故障モードを設けることを含めて、様々な利点を有する。
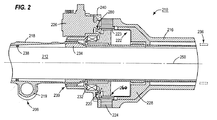
【選択図】図2
Description
100 航空機着陸装置
102 着陸装置ヨーク
104 引込み/伸展機構
106 トルク連結棒
108 車輪列ユニット
110 航空機着陸装置用操向システム
112 オレオ緩衝支柱
116 脚部分
118 回転部材
206 トルク連結棒
210 航空機着陸装置用操向システム
212 オレオ緩衝支柱
216 着陸装置脚
218 回転部材
219 突出耳部
220 ウェーブジェネレータ
222 フレックススプライン
223 フレックススプラインの外歯
224 固定スプライン
226 電気モータモジュール
228 フレックススプライン筐体
232 軸受
234 コネクタ機構
236 軸受
238 軸受
239 駆動スプライン
240 外筺
250 中心軸
260 ハーモニックドライブ機構
280 追加的な歯車機構
310 航空機着陸装置用操向システム
312 オレオ緩衝支柱
316 着陸装置脚
318 回転部材
320 ウェーブジェネレータ
322 フレックススプライン
323 フレックススプラインの外歯
324 固定スプライン
326 電気モータモジュール
332 軸受
338 軸受
340 担体
342 フレックススプライン軸受
344 軸受
350 中心軸
360 ハーモニックドライブ機構
390 外筺
399 接合部
Claims (16)
- ハーモニックドライブ機構を介して着陸装置脚に動作可能に結合された回転部材を備える航空機着陸装置用操向システム。
- 前記着陸装置脚と前記回転部材との間に相対的な回転運動を生み出すために、前記ハーモニックドライブ機構を駆動するための電気モータモジュールをさらに備える、請求項1記載の航空機着陸装置用操向システム。
- 前記回転部材を前記着陸装置脚から分離するためのクラッチ機構をさらに備える、請求項1または2記載の航空機着陸装置用操向システム。
- 前記ハーモニックドライブ機構を駆動するための歯車機構をさらに備える、請求項1乃至3のいずれか1項記載の航空機着陸装置用操向システム。
- 前記ハーモニックドライブ機構は前記着陸装置脚を直接的に駆動するように動作可能である、請求項1乃至4のいずれか1項記載の航空機着陸装置用操向システム。
- 前記ハーモニックドライブ機構は、前記着陸装置脚または前記回転部材に結合された固定スプラインを具備し、前記固定スプラインはフレックススプラインに動作可能に連結され、前記フレックススプラインは、アクチュエータに結合されたウェーブジェネレータによって駆動されるように動作可能である、請求項1乃至5のいずれか1項記載の航空機着陸装置用操向システム。
- 前記着陸装置脚または前記回転部材は、前記ハーモニックドライブ機構の少なくとも一部を通って突出するか、または前記ハーモニックドライブ機構の内部に位置する、請求項1乃至6のいずれか1項記載の航空機着陸装置用操向システム。
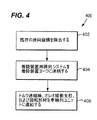
- ハーモニックドライブ機構を介して回転部材を着陸装置脚に結合するステップを含む、航空機操向システムを設ける方法。
- 電気モータモジュールを活動化することにより前記着陸装置脚と前記回転部材との間に相対的な回転運動が誘発されるように、前記ハーモニックドライブ機構を駆動するための電気モータモジュールを設けるステップをさらに含む、請求項8記載の方法。
- クラッチ機構が動作されたとき前記回転部材を前記着陸装置脚から分離するためのクラッチ機構を設けるステップをさらに含む、請求項8または請求項9記載の方法。
- 前記ハーモニックドライブ機構を駆動するための歯車機構を設けるステップをさらに含む、請求項8乃至10のいずれか記載の方法。
- 前記ハーモニックドライブ機構を活動化することにより前記着陸装置脚が直接的に駆動される、請求項8乃至11のいずれか記載の方法。
- 前記ハーモニックドライブ機構は、前記着陸装置脚または前記回転部材に結合された固定スプラインを具備し、前記固定スプラインはフレックススプラインに動作可能に連結され、前記フレックススプラインは、アクチュエータに結合されたウェーブジェネレータによって、前記アクチュエータが動作されたとき駆動される、請求項8乃至12のいずれか記載の方法。
- 前記着陸装置脚または前記回転部材は、前記ハーモニックドライブ機構を介してまたは前記ハーモニックドライブ機構の内部に設けられる、請求項8乃至13のいずれか記載の方法。
- 添付図面を参照して実質的に上記で説明された航空機着陸装置用操向システム。
- 添付図面を参照して実質的に上記で説明された航空機操向システムを設ける方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0808087.1 | 2008-05-02 | ||
| GB0808087A GB2459714B (en) | 2008-05-02 | 2008-05-02 | Aircraft landing gear steering system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009269596A true JP2009269596A (ja) | 2009-11-19 |
| JP2009269596A5 JP2009269596A5 (ja) | 2012-05-24 |
| JP5815200B2 JP5815200B2 (ja) | 2015-11-17 |
Family
ID=39537241
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009108605A Expired - Fee Related JP5815200B2 (ja) | 2008-05-02 | 2009-04-28 | 航空機着陸装置用操向システム |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8752790B2 (ja) |
| JP (1) | JP5815200B2 (ja) |
| CN (1) | CN101665154B (ja) |
| BR (1) | BRPI0901815A2 (ja) |
| CA (1) | CA2664885C (ja) |
| DE (1) | DE102009003834A1 (ja) |
| FR (1) | FR2930761B1 (ja) |
| GB (1) | GB2459714B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023139884A1 (ja) | 2022-01-18 | 2023-07-27 | 住友精密工業株式会社 | 航空機の着陸装置 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2459714B (en) * | 2008-05-02 | 2011-03-23 | Ge Aviat Uk | Aircraft landing gear steering system |
| CN101870357B (zh) * | 2010-06-23 | 2013-01-23 | 南京航空航天大学 | 半环形作动筒前轮转弯操纵机构 |
| CN101879944A (zh) * | 2010-07-19 | 2010-11-10 | 中国航空工业集团公司西安飞机设计研究所 | 一种新型转弯控制律实现方法 |
| US8403257B2 (en) * | 2010-12-03 | 2013-03-26 | Bae Systems Controls Inc. | Hydraulic ground propulsion system |
| US9233752B2 (en) | 2011-07-29 | 2016-01-12 | Borealis Technical Limited | Drive system with harmonic drive for self-propelled aircraft wheel |
| US8899516B2 (en) * | 2012-04-05 | 2014-12-02 | JHamilton Sundstrand Corporation | Coaxial contra-rotating motors for differential landing gear steering |
| GB201209527D0 (en) * | 2012-05-29 | 2012-07-11 | Airbus Operations Ltd | Aircraft landing gear arrangement, a kit therefore, an aircraft comprising the same and a method of determining the angular position of an aircraft wheel |
| EP3006332A1 (en) * | 2014-10-08 | 2016-04-13 | Goodrich Actuation Systems Ltd. | Nose wheel steering |
| FR3027015B1 (fr) * | 2014-10-10 | 2016-12-09 | Messier Bugatti Dowty | Atterrisseur d'aeronef. |
| US10415596B2 (en) * | 2016-03-24 | 2019-09-17 | United Technologies Corporation | Electric actuation for variable vanes |
| CN107867394B (zh) * | 2017-11-08 | 2020-07-28 | 北京航空航天大学 | 一种飞机前轮转弯驱动装置 |
| CN110886815B (zh) * | 2019-10-30 | 2021-12-28 | 重庆大学 | 一种航空器起落架齿轮传动转向装置 |
| KR20240084326A (ko) | 2022-12-06 | 2024-06-13 | 현대자동차주식회사 | 랜딩 기어 시스템 |
| EP4425012A1 (en) | 2023-03-02 | 2024-09-04 | Goodrich Actuation Systems Limited | Strain wave gearing actuator, flexpline for such an actuator and aircraft control surface using such an actuator |
| US12497165B2 (en) | 2023-07-13 | 2025-12-16 | Eaton Intelligent Power Limited | Rotary actuator |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2906143A (en) * | 1955-03-21 | 1959-09-29 | United Shoe Machinery Corp | Strain wave gearing |
| US3211400A (en) * | 1964-04-15 | 1965-10-12 | Lionel Pacific Inc | Landing gear steering apparatus |
| GB2287681A (en) * | 1994-03-19 | 1995-09-27 | British Aerospace | An aircraft steering arrangement |
| JP2007192248A (ja) * | 2006-01-17 | 2007-08-02 | Jtekt Corp | 波動歯車機構の連結構造及び伝達比可変装置 |
| JP2007284054A (ja) * | 2006-04-12 | 2007-11-01 | Messier Bugatti | 複数の電気機械式アクチュエータを含む飛行機用着陸装置およびその試験方法 |
| WO2008038037A1 (en) * | 2006-09-25 | 2008-04-03 | Airbus Uk Limited | Actuator |
| GB2459714A (en) * | 2008-05-02 | 2009-11-04 | Ge Aviat Uk | Aircraft landing gear steering system |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2460387A (en) * | 1943-12-03 | 1949-02-01 | Goodrich Co B F | Landing gear |
| US2500577A (en) * | 1947-06-27 | 1950-03-14 | Jr Charles T Sands | Spinning device for airplane landing wheels |
| GB791101A (en) | 1955-11-16 | 1958-02-26 | Jarry Automobile Ltd | Improvements in or relating to steering mechanism for aircraft nose wheels, or the like |
| FR1334565A (fr) | 1962-07-06 | 1963-08-09 | Dowty Technical Dev Ltd | Montage de train d'atterrissage orientable |
| US3214999A (en) * | 1964-04-09 | 1965-11-02 | Roger H Lapp | Harmonic drive |
| GB1071474A (en) | 1964-10-02 | 1967-06-07 | British Aircraft Corp Ltd | Improvements relating to fluid-pressure motors |
| US3435705A (en) * | 1966-06-14 | 1969-04-01 | United Shoe Machinery Corp | Harmonic drive power hinge pins |
| SU510889A1 (ru) * | 1974-09-30 | 1979-06-30 | Всесоюзный научно-исследовательский институт хлебопекарной промышленности | Способ производства хлеба |
| GB1570291A (en) * | 1976-05-28 | 1980-06-25 | Westland Aircraft Ltd | Ground traction devices |
| SU977870A1 (ru) * | 1980-04-25 | 1982-11-30 | Предприятие П/Я А-1836 | Многоскоростной привод |
| US4449442A (en) * | 1982-01-05 | 1984-05-22 | Sundstrand Corporation | Hydraulic valve control and feedback utilizing a harmonic drive differential |
| GB2161123A (en) | 1984-07-05 | 1986-01-08 | Dowty Rotol Ltd | Aircraft retractable and steerable undercarriages |
| FR2677951B1 (fr) | 1991-06-21 | 1996-03-08 | Messier Bugatti | Dispositif d'orientation electrique d'un atterrisseur. |
| US5947414A (en) | 1994-03-17 | 1999-09-07 | The Boeing Company | Main landing gear having tilting of main gear pivot pins |
| US5643128A (en) * | 1996-02-01 | 1997-07-01 | Ami Industries | Harmonic drive using guided, floating cam driven cylinders as power transmitting elements |
| DE69830314T2 (de) * | 1998-03-25 | 2006-02-02 | Harmonic Drive Systems Inc. | Phasenregler |
| CN2402596Y (zh) | 1999-09-01 | 2000-10-25 | 张新民 | 飞机起落架机械式控制装置 |
| US6860726B2 (en) * | 2002-02-05 | 2005-03-01 | The Boeing Company | Dual drive for hydraulic pump and air boost compressor |
| US20070158497A1 (en) * | 2003-10-09 | 2007-07-12 | Edelson Jonathan S | Geared wheel motor design |
| JP4699381B2 (ja) * | 2003-12-06 | 2011-06-08 | ツェットエフ、レンクジステメ、ゲゼルシャフト、ミット、ベシュレンクテル、ハフツング | 車両用重畳式操向システム |
| US7237748B2 (en) | 2003-12-15 | 2007-07-03 | Delos Aerospace, Llc | Landing gear method and apparatus for braking and maneuvering |
| EP1958873B1 (en) | 2004-06-18 | 2011-03-30 | Goodrich Corporation | Landing gear with locking steering system |
| US7306535B2 (en) * | 2004-06-29 | 2007-12-11 | Delphi Technologies, Inc. | Vehicle steering device and method |
| US7178427B2 (en) * | 2004-08-26 | 2007-02-20 | Honeywell International, Inc. | Motor driven harmonic drive actuator having an interposed output mechanism |
| FR2887517B1 (fr) | 2005-06-28 | 2008-09-12 | Airbus France Sas | Dispositif de direction a encombrement reduit pour atterrisseur d'aeronef |
| US7975960B2 (en) * | 2005-08-29 | 2011-07-12 | Borealis Technical Limited | Nosewheel control apparatus |
| FR2893912B1 (fr) | 2005-11-30 | 2008-02-08 | Messier Bugatti Sa | Frein electromecanique, notamment pour aeronef, avec actionneurs ayant un debattement angulaire |
| JP2008208867A (ja) * | 2007-02-23 | 2008-09-11 | Jtekt Corp | 波動歯車減速機及び伝達比可変操舵装置 |
| US8220740B2 (en) * | 2007-11-06 | 2012-07-17 | Borealis Technical Limited | Motor for driving aircraft, located adjacent to undercarriage wheel |
| DE102009002743B4 (de) * | 2009-04-30 | 2022-02-10 | Ford Global Technologies, Llc | Verfahren zum Betreiben eines aktiven Lenksystems sowie aktives Lenksystem |
-
2008
- 2008-05-02 GB GB0808087A patent/GB2459714B/en not_active Expired - Fee Related
-
2009
- 2009-04-24 FR FR0952701A patent/FR2930761B1/fr active Active
- 2009-04-27 DE DE102009003834A patent/DE102009003834A1/de not_active Withdrawn
- 2009-04-28 JP JP2009108605A patent/JP5815200B2/ja not_active Expired - Fee Related
- 2009-04-29 US US12/431,811 patent/US8752790B2/en active Active
- 2009-04-29 CN CN200910138825.9A patent/CN101665154B/zh not_active Expired - Fee Related
- 2009-04-30 CA CA2664885A patent/CA2664885C/en not_active Expired - Fee Related
- 2009-05-04 BR BRPI0901815-8A patent/BRPI0901815A2/pt not_active IP Right Cessation
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2906143A (en) * | 1955-03-21 | 1959-09-29 | United Shoe Machinery Corp | Strain wave gearing |
| US3211400A (en) * | 1964-04-15 | 1965-10-12 | Lionel Pacific Inc | Landing gear steering apparatus |
| GB2287681A (en) * | 1994-03-19 | 1995-09-27 | British Aerospace | An aircraft steering arrangement |
| JP2007192248A (ja) * | 2006-01-17 | 2007-08-02 | Jtekt Corp | 波動歯車機構の連結構造及び伝達比可変装置 |
| JP2007284054A (ja) * | 2006-04-12 | 2007-11-01 | Messier Bugatti | 複数の電気機械式アクチュエータを含む飛行機用着陸装置およびその試験方法 |
| WO2008038037A1 (en) * | 2006-09-25 | 2008-04-03 | Airbus Uk Limited | Actuator |
| GB2459714A (en) * | 2008-05-02 | 2009-11-04 | Ge Aviat Uk | Aircraft landing gear steering system |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023139884A1 (ja) | 2022-01-18 | 2023-07-27 | 住友精密工業株式会社 | 航空機の着陸装置 |
| US12595046B2 (en) | 2022-01-18 | 2026-04-07 | Sumitomo Precision Products Co., Ltd. | Landing gear for aircraft |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090294578A1 (en) | 2009-12-03 |
| CA2664885C (en) | 2016-09-13 |
| GB2459714B (en) | 2011-03-23 |
| BRPI0901815A2 (pt) | 2010-05-11 |
| FR2930761A1 (fr) | 2009-11-06 |
| CN101665154A (zh) | 2010-03-10 |
| CA2664885A1 (en) | 2009-11-02 |
| JP5815200B2 (ja) | 2015-11-17 |
| GB0808087D0 (en) | 2008-06-11 |
| GB2459714A (en) | 2009-11-04 |
| DE102009003834A1 (de) | 2009-11-05 |
| US8752790B2 (en) | 2014-06-17 |
| FR2930761B1 (fr) | 2017-06-09 |
| CN101665154B (zh) | 2014-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5815200B2 (ja) | 航空機着陸装置用操向システム | |
| US9376202B2 (en) | Pitch control of contra-rotating airfoil blades | |
| CN103097243A (zh) | 尤其用于旋翼飞机的推进和运动传递组件 | |
| US10640199B2 (en) | Wheel and gear assembly | |
| US8870538B2 (en) | Counter rotating facegear gearbox | |
| EP2778047A2 (en) | Damping arrangement for aircraft landing gear, for example a nosewheel | |
| EP3038906B1 (en) | Light weight propulsor gearbox | |
| CN106114844B (zh) | 直升机旋摆翼4pss+sp型并联多驱动装置 | |
| JP7225519B2 (ja) | 移動体 | |
| JP2019504794A (ja) | ドライブトレイン | |
| US10358211B2 (en) | Rotor apparatus | |
| EP4056466B1 (en) | Nose-wheel steering system | |
| EP3055206B1 (en) | Active vibration control actuator | |
| RU2733306C1 (ru) | Винт для летательного аппарата, способного к зависанию | |
| EP3137377B1 (en) | Radially compliant quill shaft | |
| EP4273041B1 (en) | Integral steering motor and collar for landing gear | |
| WO2025177112A1 (en) | Electromechanical unit for a variable pitch propeller | |
| US20160207610A1 (en) | Aircraft with drive element coupled to gearbox housing exterior |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120329 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130328 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20130401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130730 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130731 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131024 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140114 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20141020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20141023 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150321 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150519 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150721 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150924 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5815200 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |