JP2009291015A - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP2009291015A JP2009291015A JP2008141978A JP2008141978A JP2009291015A JP 2009291015 A JP2009291015 A JP 2009291015A JP 2008141978 A JP2008141978 A JP 2008141978A JP 2008141978 A JP2008141978 A JP 2008141978A JP 2009291015 A JP2009291015 A JP 2009291015A
- Authority
- JP
- Japan
- Prior art keywords
- armature
- cover member
- motor
- elastic member
- central axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000012212 insulator Substances 0.000 claims abstract description 18
- 238000004804 winding Methods 0.000 claims description 3
- 230000002265 prevention Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 238000000034 method Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229910000976 Electrical steel Inorganic materials 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images










Landscapes
- Motor Or Generator Frames (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
【課題】モータの信頼性を向上するとともにモータの小型化を可能とする。
【解決手段】モータ1は電機子21の上端部211を覆う第1カバー部材5、電機子21が圧入状態にて固定される第2カバー部材6、および、電機子21と第1カバー部材5との間に挟まれる弾性部材7を備える。モータ1では、弾性部材7の下部の凹部71および上部がそれぞれインシュレータ213の突出部215および第1カバー部材5の下端の凹部5111に中心軸J1を中心とする周方向において係合する。これにより、弾性部材7、突出部215および凹部5111にて第2カバー部材5に対する電機子21の回り止めが実現され、仮に第2カバー部材6に対する電機子21の固定が緩んでも電機子21の回転が防止され、モータ1の信頼性が向上される。さらに、弾性部材7が電機子21の上端に位置することから中心軸J1に垂直な方向におけるモータ1の小型化が可能とされる。
【選択図】図4
【解決手段】モータ1は電機子21の上端部211を覆う第1カバー部材5、電機子21が圧入状態にて固定される第2カバー部材6、および、電機子21と第1カバー部材5との間に挟まれる弾性部材7を備える。モータ1では、弾性部材7の下部の凹部71および上部がそれぞれインシュレータ213の突出部215および第1カバー部材5の下端の凹部5111に中心軸J1を中心とする周方向において係合する。これにより、弾性部材7、突出部215および凹部5111にて第2カバー部材5に対する電機子21の回り止めが実現され、仮に第2カバー部材6に対する電機子21の固定が緩んでも電機子21の回転が防止され、モータ1の信頼性が向上される。さらに、弾性部材7が電機子21の上端に位置することから中心軸J1に垂直な方向におけるモータ1の小型化が可能とされる。
【選択図】図4
Description
本発明は、電動式のモータに関する。
従来より、電動式のモータでは電機子を覆うカバー部材に対する電機子の回り止めが行われており、例えば、特許文献1に開示されるモータでは、ステータ(電機子)よりも内側においてステータのモールド成形時に設けられる凹部とカバーとの間に防振ゴムが配置され、凹部と防振ゴムに設けられる凸部とが嵌り合うことにより、ステータと防振ゴムとの間の相対的な回転、すなわち、ステータとカバーとの間の相対的な回転が防止される。
特許文献2に開示される水中モータでは、ステータコアの外周面に中心軸に平行に伸びるキー溝が形成され、ステータコアの外周を覆うモータフレームの内周面にキー溝に対向する切欠状の溝が設けられる。ステータコアのキー溝とモータフレームとの間にはキーが挿入され、キーの一方の先端の径方向外方に伸びる係止爪がモータフレームの溝に嵌り合うことにより、モータフレームに対するステータコアの回り止めが行われる。また、特許文献2では、ステータコアの外周を覆うモータフレームにステータコアに向かう貫通孔を設け、当該貫通孔にピンを打ち込んでステータコアの回転を防止する技術も開示されている。
特開2000−188841号公報
特開2002−345185号公報
ところで、特許文献1に示されるモータでは、ステータよりも内側に防振ゴムが配置されるためカバーに対するステータの回り止めが十分には行われず、モータの信頼性が確保されない。また、特許文献2に示されるように、キーを利用してモータフレームに対するステータコアの回り止めが行われるモータでは、モータが中心軸に垂直な方向に大きくなってしまう。さらに、ピンを利用してステータコアの回り止めが行われる場合は、カバーを薄くするとピン用の貫通穴の長さが確保されないため、カバーに対するステータコアの回り止めの強度が低下する。
また、自動車等の車両に搭載されるモータは振動を受ける環境下で使用されるため高い信頼性が要求されており、カバー部材に対する電機子の回り止めを確実に行う必要がある。
本発明は、上記課題に鑑みなされたものであり、電機子の外周を覆うカバー部材に対する電機子の回り止めを確実に行うことによりモータの信頼性を向上するとともに、中心軸に垂直な方向においてモータを小型化することを目的としている。
請求項1に記載の発明は、電動式のモータであって、略円筒状の電機子を有するステータ部と、前記電機子内に挿入されるロータ部と、前記ロータ部を前記ステータ部に対して前記電機子の中心軸を中心に回転可能に支持する軸受機構と、前記電機子の前記中心軸方向における一方の端部を覆う第1カバー部材と、前記電機子の外周を覆うとともに前記第1カバー部材により塞がれる開口を有する第2カバー部材と、前記電機子の前記一方の端部と前記第1カバー部材との間に挟まれるとともに、前記中心軸を中心とする周方向において前記電機子および前記第1カバー部材と係合する樹脂製の弾性部材とを備える。
請求項2に記載の発明は、請求項1に記載のモータであって、前記電機子が、前記中心軸に向かって突出する複数のティースを有するステータコアと、前記複数のティースを覆うインシュレータと、前記複数のティースに導線を巻回することにより形成されたコイルとを備え、前記インシュレータが、前記一方の端部における前記ステータコアの外縁部上において径方向外方に伸びる突出部を有し、前記弾性部材が前記突出部に前記中心軸に平行な方向において接するとともに前記周方向において係合する。
請求項3に記載の発明は、請求項2に記載のモータであって、前記インシュレータが、前記ステータコアの前記外縁部上において前記周方向に配列されるとともに径方向外方に伸びる複数の突出部を有し、前記弾性部材が、前記中心軸を中心とする環状であり、前記複数の突出部に前記中心軸に平行な方向において接するとともに前記周方向において係合する。
請求項4に記載の発明は、請求項2に記載のモータであって、前記弾性部材の前記周方向の長さが、前記弾性部材が配置される径方向の位置において前記電機子のティース間のピッチに対応する距離の0.5倍以上1.5倍以下である。
請求項5に記載の発明は、請求項1ないし4のいずれかに記載のモータであって、前記第1カバー部材が、前記電機子の前記一方の端部に向かって突出するとともに前記第2カバー部材の前記開口に嵌め合わされる円筒部を有し、前記円筒部の前記電機子側の端部に前記周方向において前記弾性部材と係合する凹部が設けられる。
請求項6に記載の発明は、請求項1ないし5のいずれかに記載のモータであって、前記第1カバー部材が前記第2カバー部材に対してネジにより固定される。
請求項7に記載の発明は、請求項1ないし6のいずれかに記載のモータであって、車両に搭載される。
本発明によれば、電機子の外周を覆うカバー部材に対する電機子の回り止めを確実に行うことによりモータの信頼性が向上されるとともに、中心軸に垂直な方向においてモータの小型化が可能となる。
また、請求項2および3の発明では、電機子の回り止めの強度を容易に確保することができ、請求項4の発明では、弾性部材による回り止めの機能を確保しつつ弾性部材の大きさを小さく抑えることができる。請求項5の発明では、弾性部材に係合する凹部を容易に設けることができる。請求項6の発明では、第2カバー部材に対して第1カバー部材が回転することが確実に防止される。
図1は本発明の一の実施の形態に係る電動式のモータ1が搭載されたパワーステアリング装置9を示す図である。パワーステアリング装置9は、自動車等の車両の運転操作の補助に利用され、ハンドルや車軸等のステアリング機構に接続されるシャフト部91、ハンドルに加えられるトルクを検出するトルクセンサ92、トルクセンサ92からの出力に基づいて必要なアシスト力を算出するECU(Electronic Control Unit)等の制御ユニット93、制御ユニット93からの出力に基づいて回転力を発生するモータ1、および、回転数を減速しつつモータ1の回転力をステアリング機構に伝える減速機構94を備える。
パワーステアリング装置9が搭載された車両では、操作者からハンドルに加えられる回転力に基づいてパワーステアリング装置9のモータ1が駆動され、モータ1の回転力によりハンドルの回転が補助されるため、車両のエンジン出力を直接的に利用することなく、比較的小さな力で操作者がハンドルを操作することが可能とされる。
図2はモータ1の部分断面図である。モータ1は略円筒状の電機子21を有するステータ部2、電機子21内に挿入される略円柱状のロータ部3、軸受機構として中心軸J1に沿って電機子21の上方および下方に設けられる玉軸受4(下側の玉軸受は図示されていない。)、電機子21の上端部211を覆う第1カバー部材5、電機子21の外周および下端部を覆う有底円筒状の第2カバー部材6、並びに、電機子21の上端部211と第1カバー部材5との間に位置する樹脂製の弾性部材7を備える。電機子21は第2カバー部材6の側部61内に焼きばめにより圧入状態にて固定される。以下の説明では、電機子21の中心軸J1に沿って第1カバー部材5側を上側、第2カバー部材6側を下側として説明するが、中心軸J1は必ずしも重力方向に一致する必要はない。
ロータ部3は、シャフト31、シャフト31の周囲に取り付けられる略円柱状のロータコア32、ロータコア32の外周に取り付けられる界磁用磁石33、および、ロータコア32の上下面に取り付けられる端板34(下側の端板は図示されていない。)を備える。シャフト31は第1カバー部材5の穴部51に挿入され、界磁用磁石33は電機子21に中心軸J1に垂直な方向において対向する。
図3は電機子21および第2カバー部材6の平面図であり、弾性部材7を二点鎖線にて示している。図2および図3に示すように、ステータ部2の電機子21は、中心軸J1に向かって突出する12個のティース2121を有するステータコア212、ティース2121を覆うインシュレータ213、および、12個のコイル214(図3では図示を省略している。)を備える。ステータコア212は複数の珪素鋼板を積層して形成され、ステータコア212の外周では隣り合う2つのティース2121の外側が互いに連なって環状のコアバック2122が形成される。
インシュレータ213は上端部211において中心軸J1を中心とする径方向外方に伸びる12個の突出部215を有し、図3に示すように、12個の突出部215はそれぞれステータコア212の外縁部(すなわち、コアバック2122)上に位置する。また、インシュレータ213を介在させつつティース2121上に導線を巻回することにより図2に示すコイル214が形成される。なお、ステータ部2は電機子21以外に電機子21の配線を保持する基板やロータ部3の回転を検出するセンサ等も備えている。
図2に示すように、玉軸受4は第1カバー部材5の穴部51の内側に配置され、玉軸受4よりも下方に位置する他の玉軸受は第2カバー部材6の底部62の中央に配置され、2つの玉軸受によりシャフト31の上部および下部が支持される。モータ1では、ステータ部2の電機子21とロータ部3の界磁用磁石33との間でトルクが発生し、ロータ部3がステータ部2に対して中心軸J1を中心に回転可能とされる。
図4はモータ1の分解斜視図であり、電機子21を第2カバー部材6よりも上方に突出させた状態にて示し、弾性部材7を電機子21と第1カバー部材5との間に示している。また、ステータコア212を形成する鋼板同士の境界の図示を省略している。第1カバー部材5は電機子21の上端部211に向かって突出する円筒部511、および、外周に中心軸J1に平行に伸びる4つの穴部53を有し、円筒部511の下端部(電機子21側の端部)には中心軸J1を中心とする周方向(以下、単に「周方向」と呼ぶ。)に長く、中心軸J1を中心とする径方向(以下、単に「径方向」と呼ぶ。)に円筒部511を横切る切欠状の凹部5111が設けられる。第2カバー部材6は上部の周方向における4箇所にフランジ状の部位を有し、当該部位に雌ネジ部63が形成される。
図2に示すように、第2カバー部材6の上端の開口611は第1カバー部材5により塞がれて電機子21が収容される空間が形成され、図4に示すネジ8が第1カバー部材5の穴部53に挿入されるとともに第2カバー部材6の雌ネジ部63に螺合されることにより、第1カバー部材5が第2カバー部材6に対して固定される。モータ1では、図2に示すように、弾性部材7が電機子21の上端部211と第1カバー部材5の円筒部511との間に圧縮状態にて挟まれる。
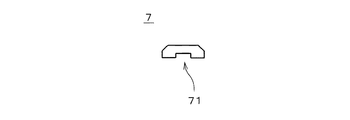
図5は弾性部材7の正面図であり、図6は弾性部材7の平面図である。弾性部材7は、例えば、ゴムにより形成され、図5および図6に示すように中心軸J1(図2参照)を中心とする径方向に垂直な方向に伸びる略棒状であり、図5に示すように弾性部材7の下端には弾性部材7の伸びる方向に垂直な方向(すなわち、径方向)に弾性部材7を横切る切欠状の凹部71が形成される。
図4に示すように、弾性部材7は第1カバー部材5の円筒部511の凹部5111およびインシュレータ213の1つの突出部215に対して中心軸J1に平行な方向に並ぶように配置され、既述のように、弾性部材7は円筒部511と突出部215との間に挟まれる。図3および図4に示すように、弾性部材7の周方向の長さはステータコア212の外縁部(すなわち、弾性部材7が配置される径方向の位置)におけるティース2121(図3参照)間のピッチに対応する距離よりも僅かに小さくされ、図4に示す弾性部材7の凹部71の周方向における幅は突出部215の周方向における幅にほぼ等しくされる。また、第1カバー部材5の凹部5111の周方向における幅は弾性部材7の周方向の長さよりも僅かに大きくされる。
図7は、第1カバー部材5の円筒部511、弾性部材7、インシュレータ213の突出部215およびステータコア212の径方向に垂直な断面を示す図である。弾性部材7の上部72は円筒部511の凹部5111に嵌り合い、弾性部材7の凹部71は突出部215に嵌り合う。これにより、弾性部材7は、上部72が円筒部511の凹部5111の周方向における両側に係合し(すなわち、周方向において接する。)、凹部71の下方を向く面が突出部215に対して中心軸J1(図2参照)に平行な方向において接するとともに凹部71の周方向における両側の部位が突出部215に周方向において係合する(すなわち、周方向において接する。)。
モータ1では、弾性部材7、第1カバー部材5の凹部5111および突出部215により第2カバー部材6に対する電機子21(図4参照)の回り止めが実現される。弾性部材7の周方向の長さはティース2121間のピッチに対応する距離よりも僅かに小さくされることから、弾性部材7は電機子21の回り止めの機能を確保しつつ大きさを小さく抑えた設計となっている。
図2に示す電機子21は焼きばめにより第2カバー部材6に対して強固に固定されるため、通常、第2カバー部材6に対して電機子21が移動することはない。しかし、モータ1に対して大きな力が作用する過酷な環境下にモータ1が置かれることにより、さらには、モータ1が経時変化することにより、仮に第2カバー部材6に対する電機子21の固定に緩みが生じても弾性部材7が電機子21および第1カバー部材5に対して周方向において係合するため、電機子21が第2カバー部材6に対して回転することが確実に防止される。なお、図7に示す弾性部材7の上部72の上面と円筒部511の凹部5111の下方を向く面との摩擦によっても電機子21の回り止めが行われる。また、弾性部材7を介して第2カバー部材6に対する電機子21の上方への移動も防止される。
第2カバー部材6に第1カバー部材5が固定される際には、まず、図4に示すように、弾性部材7が電機子21上に載置され、凹部71がインシュレータ213の1つの突出部215に嵌め合わされる。次に、弾性部材7と第1カバー部材5の凹部5111とが中心軸J1に平行な方向に並ぶように第1カバー部材5が第2カバー部材6に対して中心軸J1方向に対向して配置される。そして、図2に示すように、第1カバー部材5の円筒部511が第2カバー部材6の開口611に嵌め合わされる。
これにより、弾性部材7が電機子21の上端部211と第1カバー部材5との間に圧縮状態にて挟まれる。その後、図4に示すように、ネジ8が第1カバー部材5の穴部53に挿入されるとともに第2カバー部材6の雌ネジ部63に螺合され、第1カバー部材5と第2カバー部材6とが固定される。
以上に説明したように、モータ1では、弾性部材7が第1カバー部材5の凹部5111およびインシュレータ213の突出部215に周方向において係合することにより第1カバー部材5および第2カバー部材6に対する電機子21の回り止めが確実に行われ、モータ1の信頼性が向上される。また、弾性部材7はステータコア212の外縁部上に位置するインシュレータ213の突出部215に周方向において係合するため、電機子21の回り止めの強度を容易に確保することができる。このようにモータ1は高い信頼性を有するため、車両用のモータとして特に適している。
さらに、第1カバー部材5および第2カバー部材6はネジ8により固定されるため、第2カバー部材5に対して第1カバー部材6が回転することが確実に防止され、その結果、第2カバー部材5に対する電機子21の回り止めがより確実に行われる。第1カバー部材5では、円筒部511を利用して弾性部材7に係合する凹部5111を容易に設けることができる。
モータ1では、弾性部材7、インシュレータ213の突出部215および第1カバー部材5の凹部5111が中心軸J1に平行な方向に並んで配置されて電機子21の回り止めが行われるため、中心軸J1に垂直な方向においてモータ1の小型化が可能とされる。また、弾性部材7が第1カバー部材5と電機子21との間に挟まれることにより電機子21の高さが誤差を有する場合であってもモータ1の高さが変化することはない。
図8および図9は弾性部材の他の例に係る底面図および平面図である。図8に示すように、他の例に係る弾性部材7aは略環状となっており、弾性部材7aの下部には12箇所に等間隔に凹部73が設けられ、図9に示すように、上部には凹部73と重なる位置において上方に向かって突出する凸部74が設けられる。また、弾性部材7aが採用される場合、図4に示す第1カバー部材5の円筒部511には弾性部材7aの凸部74に対応する12箇所に凹部5111が形成される。
図10は第1カバー部材5の円筒部511、弾性部材7a、インシュレータ213の突出部215およびステータコア212の径方向に垂直な断面を示す図であり、図7に対応している。弾性部材7aでは、各凹部73が対応する突出部215に中心軸J1(図2参照)を中心とする周方向において係合し、各凸部74が円筒部511の対応する凹部5111に周方向において係合する。これにより、弾性部材7a、突出部215および円筒部511の凹部5111にて第2カバー部材6に対する電機子21(図3参照)の回り止めの強度を容易に確保することが実現される。また、図5に示す弾性部材7を複数個用いて回り止めの強度を向上する場合と比べて作業性を向上することができる。
図11は弾性部材のさらに他の例に係る斜視図である。図11に示す弾性部材7bは、図8および図9に示す弾性部材7aと同様に略環状となっており、弾性部材7bの下部には12箇所に等間隔に凹部75が設けられ、上部には4箇所に等間隔に滑らかな(かつ、なだらかな)凸部76が設けられる。弾性部材7bが採用される場合、図4に示す第1カバー部材5の円筒部511には弾性部材7bの凸部76に対応する4箇所に滑らかな(かつ、なだらかな)な凹部5111が形成される。
図11に示す弾性部材7bにおいても、各凹部75が対応する突出部215(図4参照)に中心軸J1に平行な方向において接するとともに中心軸J1を中心とする周方向において係合し、各凸部76も円筒部511の対応する凹部5111に中心軸J1に平行な方向において接するとともに周方向において係合する。これにより、弾性部材7b、突出部215および凹部5111にて第2カバー部材6に対する電機子21の回り止めの強度を容易に確保することが実現される。特に、弾性部材7bでは、凸部76をなだらかな形状として数を少なくする(好ましくは6個以下とする)ことにより、円筒部511に加わる押圧力が分散され、歪みによるステータ部2に対するロータ部3の位置ずれが防止される。また、4つの凹部5111を強固に弾性部材7bに係合させるために、凹部5111は図4に示す第1カバー部材5の穴部53の中心軸J1側に設けられる。
以上、本発明の実施の形態について説明したが、本発明は上記実施の形態に限定されるものではなく、様々な変更が可能である。例えば、弾性部材7の周方向の長さは上記実施の形態に示すものには限定されず、好ましくは、電機子21の十分な回り止めを行うために弾性部材7の径方向の位置におけるティース2121間のピッチに対応する距離の0.5倍以上とされ、弾性部材7が弾性部材7の両側に位置する突出部215に干渉することを避けるために当該距離の1.5倍以下とされる。また、モータ1では図8および図9に示す弾性部材7aの一部である円弧状の弾性部材が搭載されてもよい。
弾性部材は、ある程度の弾性を有するのであれば様々な樹脂(樹脂以外の材料を有する場合を含む。)により形成されてよく、様々な堅さのゴムや繊維等の他の材料で強化されたゴム、その他弾性を有する高分子材料により形成されたものが用いられてよい。
上記実施の形態では、第1カバー部材5の円筒部511に凹部5111に代えて凸部が設けられ、弾性部材7の上部に凹部が設けられることにより、第1カバー部材5と弾性部材7との周方向における係合が実現されてもよい。電機子21は焼きばめ以外の手法により圧入状態にて第2カバー部材6に固定されてよく、また、第2カバー部材6は電機子21の外周を覆うのであれば底部が閉塞されない円筒状とされてもよい。
モータ1はパワーウィンド等のモータとして車両に搭載されてもよい。
1 モータ
2 ステータ部
3 ロータ部
4 玉軸受
5 第1カバー部材
6 第2カバー部材
7,7a,7b 弾性部材
8 ネジ
21 電機子
211 (電機子の)上端部
212 ステータコア
213 インシュレータ
215 突出部
511 円筒部
611 (第2カバー部材の)開口
2121 ティース
5111 凹部
J1 中心軸
2 ステータ部
3 ロータ部
4 玉軸受
5 第1カバー部材
6 第2カバー部材
7,7a,7b 弾性部材
8 ネジ
21 電機子
211 (電機子の)上端部
212 ステータコア
213 インシュレータ
215 突出部
511 円筒部
611 (第2カバー部材の)開口
2121 ティース
5111 凹部
J1 中心軸
Claims (7)
- 電動式のモータであって、
略円筒状の電機子を有するステータ部と、
前記電機子内に挿入されるロータ部と、
前記ロータ部を前記ステータ部に対して前記電機子の中心軸を中心に回転可能に支持する軸受機構と、
前記電機子の前記中心軸方向における一方の端部を覆う第1カバー部材と、
前記電機子の外周を覆うとともに前記第1カバー部材により塞がれる開口を有する第2カバー部材と、
前記電機子の前記一方の端部と前記第1カバー部材との間に挟まれるとともに、前記中心軸を中心とする周方向において前記電機子および前記第1カバー部材と係合する樹脂製の弾性部材と、
を備えることを特徴とするモータ。 - 請求項1に記載のモータであって、
前記電機子が、
前記中心軸に向かって突出する複数のティースを有するステータコアと、
前記複数のティースを覆うインシュレータと、
前記複数のティースに導線を巻回することにより形成されたコイルと、
を備え、
前記インシュレータが、前記一方の端部における前記ステータコアの外縁部上において径方向外方に伸びる突出部を有し、
前記弾性部材が前記突出部に前記中心軸に平行な方向において接するとともに前記周方向において係合することを特徴とするモータ。 - 請求項2に記載のモータであって、
前記インシュレータが、前記ステータコアの前記外縁部上において前記周方向に配列されるとともに径方向外方に伸びる複数の突出部を有し、
前記弾性部材が、前記中心軸を中心とする環状であり、前記複数の突出部に前記中心軸に平行な方向において接するとともに前記周方向において係合することを特徴とするモータ。 - 請求項2に記載のモータであって、
前記弾性部材の前記周方向の長さが、前記弾性部材が配置される径方向の位置において前記電機子のティース間のピッチに対応する距離の0.5倍以上1.5倍以下であることを特徴とするモータ。 - 請求項1ないし4のいずれかに記載のモータであって、
前記第1カバー部材が、前記電機子の前記一方の端部に向かって突出するとともに前記第2カバー部材の前記開口に嵌め合わされる円筒部を有し、前記円筒部の前記電機子側の端部に前記周方向において前記弾性部材と係合する凹部が設けられることを特徴とするモータ。 - 請求項1ないし5のいずれかに記載のモータであって、
前記第1カバー部材が前記第2カバー部材に対してネジにより固定されることを特徴とするモータ。 - 請求項1ないし6のいずれかに記載のモータであって、
車両に搭載されることを特徴とするモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008141978A JP2009291015A (ja) | 2008-05-30 | 2008-05-30 | モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008141978A JP2009291015A (ja) | 2008-05-30 | 2008-05-30 | モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009291015A true JP2009291015A (ja) | 2009-12-10 |
Family
ID=41459639
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008141978A Withdrawn JP2009291015A (ja) | 2008-05-30 | 2008-05-30 | モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009291015A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021200479A1 (ja) * | 2020-03-31 | 2021-10-07 | 株式会社富士通ゼネラル | 電動機 |
| WO2025215983A1 (ja) * | 2024-04-08 | 2025-10-16 | ミネベアミツミ株式会社 | 角度センサ |
-
2008
- 2008-05-30 JP JP2008141978A patent/JP2009291015A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021200479A1 (ja) * | 2020-03-31 | 2021-10-07 | 株式会社富士通ゼネラル | 電動機 |
| JP2021164314A (ja) * | 2020-03-31 | 2021-10-11 | 株式会社富士通ゼネラル | 電動機 |
| CN115315888A (zh) * | 2020-03-31 | 2022-11-08 | 富士通将军股份有限公司 | 电动机 |
| JP7359068B2 (ja) | 2020-03-31 | 2023-10-11 | 株式会社富士通ゼネラル | 電動機 |
| CN115315888B (zh) * | 2020-03-31 | 2025-04-04 | 富士通将军股份有限公司 | 电动机 |
| WO2025215983A1 (ja) * | 2024-04-08 | 2025-10-16 | ミネベアミツミ株式会社 | 角度センサ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106663991B (zh) | 无刷雨刮电机 | |
| US20150162798A1 (en) | Brushless motor | |
| JP2005020887A (ja) | 回転電機のマグネット固定構造及びマグネット固定方法 | |
| US10442401B2 (en) | Brushless wiper motor | |
| CN211557024U (zh) | 电动致动器 | |
| CN211557069U (zh) | 电动致动器 | |
| US9287750B2 (en) | Motor | |
| JP3985815B2 (ja) | 電動アクチュエータ | |
| JP4772139B2 (ja) | 電動パワーステアリング装置用モータ装置 | |
| JP5446045B2 (ja) | 回転電機及び電動パワーステアリング装置 | |
| JP7330011B2 (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| JP6589390B2 (ja) | 電動パワーステアリング装置 | |
| JP2009291015A (ja) | モータ | |
| US20100301687A1 (en) | Molded motor, electric motor vehicle and method of manufacturing molded motor | |
| KR101080494B1 (ko) | 브러시형 직류 모터 및 이를 구비한 전동식 조향장치 | |
| JP2010124661A (ja) | 回転電機 | |
| KR20120078913A (ko) | 모터 | |
| JP5158415B2 (ja) | 電動パワーステアリング装置 | |
| JP4447368B2 (ja) | レゾルバ・ステータ用カバーおよびレゾルバ・ステータの組付け方法 | |
| KR20140067345A (ko) | 환경 차량의 모터 회전자 어셈블리 | |
| KR101930333B1 (ko) | 모터 | |
| JP2019106789A (ja) | ロータおよびモータ | |
| KR101904783B1 (ko) | 모터 | |
| US12103606B2 (en) | Worm wheel of steering system speed reducer, and manufacturing method therefor | |
| JP2019106788A (ja) | ロータおよびモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20110802 |