JP2009292048A - 画像形成装置及びそのヘッド駆動制御方法 - Google Patents
画像形成装置及びそのヘッド駆動制御方法 Download PDFInfo
- Publication number
- JP2009292048A JP2009292048A JP2008148089A JP2008148089A JP2009292048A JP 2009292048 A JP2009292048 A JP 2009292048A JP 2008148089 A JP2008148089 A JP 2008148089A JP 2008148089 A JP2008148089 A JP 2008148089A JP 2009292048 A JP2009292048 A JP 2009292048A
- Authority
- JP
- Japan
- Prior art keywords
- waveform
- recording head
- image forming
- forming apparatus
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images














Landscapes
- Particle Formation And Scattering Control In Inkjet Printers (AREA)
Abstract
【課題】1つの駆動波形を用いることにより、複数のヘッドのインクの着弾位置を補正する画像形成装置及びそのヘッド駆動制御方法を提供すること。
【解決手段】主走査方向に走査するキャリッジと、キャリッジに設けられ、液滴を吐出する記録ヘッド35〜38と、記録ヘッド35〜38を駆動する記録ヘッド駆動手段31〜34と、駆動波形を生成する駆動波形生成手段27と、駆動波形生成手段27により生成された駆動波形を記録ヘッド駆動手段31〜34に送信する記録ヘッド制御手段24を有し、液滴吐出の制御を駆動波形により行う。駆動波形生成手段27は、最低限の液滴吐出を行う基本波形を複数回繰り返す駆動波形を生成する。該基本波形から波形を選択することにより、記録ヘッドが吐出する液滴の量及び/又はタイミングを決定する。
【選択図】図2
【解決手段】主走査方向に走査するキャリッジと、キャリッジに設けられ、液滴を吐出する記録ヘッド35〜38と、記録ヘッド35〜38を駆動する記録ヘッド駆動手段31〜34と、駆動波形を生成する駆動波形生成手段27と、駆動波形生成手段27により生成された駆動波形を記録ヘッド駆動手段31〜34に送信する記録ヘッド制御手段24を有し、液滴吐出の制御を駆動波形により行う。駆動波形生成手段27は、最低限の液滴吐出を行う基本波形を複数回繰り返す駆動波形を生成する。該基本波形から波形を選択することにより、記録ヘッドが吐出する液滴の量及び/又はタイミングを決定する。
【選択図】図2
Description
本発明は、ヘッドを備える画像形成装置及びそのヘッド駆動制御方法に関する。
画像形成装置の1つであるインクジェットプリンタは、一般的に複数のヘッドと、このヘッドを主走査方向に移動させるキャリッジと、副走査方向に移動させる機構と、を有している。例えばシリアル型のインクジェットプリンタでは、ヘッドを搭載したキャリッジをエンコーダに沿って主走査方向に往復移動させ、インクを吐出させ、1バンド分の画像を形成する。その後、ヘッドを副走査方向に移動させ、再度主走査方向に移動させ、インクを吐出させる。この動作を繰り返すことにより、記録媒体に画像を形成する。
尚、インクジェットプリンタにおいては、用紙の同一領域に対して同一又は異なるノズル群を用いて複数回主走査を行って画像を形成するマルチパス方式が広く採用されている。また、副走査方向に用紙を搬送する量を調整することにより、用紙の同一領域に対してインターレースを行って複数回の主走査で画像を形成するインターレース方式も採用されている。液体吐出ヘッドをヘッドとして用いたインクジェットプリンタにおいて、中間調がライン基調で表現されるとき、上記マルチパス方式とインターレース方式との組み合わせでインクを吐出する場合に、基調を形成するインク着弾位置にばらつきが生じるという問題があった。この問題を解決するために、規則的に配置される基調を形成するドットが不連続のパスで形成されるようにした技術が開示されている(例えば特許文献1)。
また、通常、キャリッジを往復させて1バンド分の画像を形成する場合、キャリッジの往路と復路では駆動信号を反転させることが必要となる。しかし、キャリッジの往路と復路で駆動信号を切替えることなく、画像を形成する技術も開示されている(例えば特許文献2)。
しかし、インクを吐出するヘッドを複数搭載し、ヘッドを移動させることで印刷を行う場合、複数のヘッドの搭載位置にズレが生じると、インクの着弾位置にもズレが生じ、インクジェットプリンタの持つ4800〜7200dpiという高精度での画質を劣化させてしまうという問題があった。
そこで、インクの着弾位置のズレを補正する手段として、エンコーダ周期又はエンコーダ周期を1/2周期、1/4周期毎に補正する技術が提案されている。しかし、この手段ではエンコーダ解像度の製造上の限界から、300〜1200pdi程度の補正しかすることができない。
また、複数のヘッド毎にヘッドの駆動波形を入力し、駆動波形に遅延を入れるなどして、インクの着弾位置を補正する技術が提案されている。例えば、特許文献3では、同一のノズル開口部において、駆動波形の入力から大きさの異なる各ドットを形成するインクが吐出されるまでの所要時間を求め、その各ドットの時間差に基づいて駆動波形の出力開始時間を遅延させることにより、着弾位置を補正する技術が開示されている。
特開2007−118245号公報
特開2004−058606号公報
特開2001−162793号公報
以下に従来のインクジェットプリンタによるヘッド駆動制御方法の詳細について、図14、図15、図16、図17に示す図を用いて詳細に説明する。
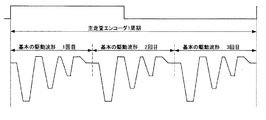
図14は、従来のインクジェットプリンタによるヘッド駆動制御方法について説明するための図である。図示するように、駆動波形は、主走査エンコーダの1周期内又は主走査解像度に応じてエンコーダ1/2、1/4周期内に収まるアナログ波形と、アナログ波形の立ち上げ/下げ毎に、ON/OFFするレディ信号から構成される。レディ信号は、図の例では、印字諧調ごとに1本の信号が必要であり、4階調では4本のレディ信号を用いる必要がある。ここで、4階調とは、インク滴サイズとして、インク滴なし、大滴、中滴、小滴の4種の打ち分けを行うことを示している。インクは、レディ信号がONしたタイミングのアナログ波形の立ち上げ/下げによって、ピエゾが振動し、吐出する。
図15は、従来のインクジェットプリンタにおける駆動波形により、4階調印字のインク大滴を駆動する方法を説明するための図である。図示するように、大滴インクの駆動は、大適用レディ信号がONしたタイミングのアナログ駆動波形立ち上げ/下げによって吐出したインクが、空中で合わさる事で大滴インクとなって用紙に着弾し、ドットを形成する。この例では、3回の吐出を組み合せることにより、インク大滴を生成している。
図16は、従来のインクジェットプリンタにおける駆動波形により、インク着弾位置を調整する方法を説明するための図である。図中には、インク着弾位置を補正する方法の1つとして、駆動波形の出力タイミングを、エンコーダ周期の1/2、1/4までディレーさせ、キャリッジ往復時のインク着弾位置、用紙に対するインク着弾位置を補正する方法を示している。
図17は、従来のインクジェットプリンタにおける駆動波形により、インク着弾位置を調整する方法を説明するための図である。図16に示す方法とは異なり、複数のヘッド毎に駆動波形を用意し、各ヘッドの駆動波形出力タイミングにディレーさせることで、ヘッド位置のバラツキによるインク着弾位置のズレを補正する方法である。
しかし、上述したような技術では、ヘッドの駆動波形が複数信号必要となり、さらには、駆動波形関連の信号をヘッド毎に配線するため、信号の引き回しが複雑化してしまうという問題があった。
本発明はこのような実情を鑑みてなされたものであり、1つの駆動波形を用いることにより、複数のヘッドのインクの着弾位置を補正する画像形成装置及びそのヘッド駆動制御方法を提供することを目的とする。
本発明の画像形成装置は、主走査方向に走査するキャリッジと、キャリッジに設けられ、液滴を吐出する記録ヘッドと、を有し、液滴吐出の制御を駆動波形により行う画像形成装置であって、記録ヘッドを駆動する記録ヘッド駆動手段と、駆動波形を生成する駆動波形生成手段と、駆動波形生成手段により生成された駆動波形を記録ヘッド駆動手段に送信する記録ヘッド制御手段と、を有し、駆動波形生成手段は、最低限の液滴吐出を行う基本波形を複数回繰り返す駆動波形を生成することを特徴とする。
本発明の画像形成装置は、複数回繰り返す基本波形から波形を選択する波形選択手段をさらに有し、記録ヘッド駆動手段は、波形選択手段により選択された波形に基づいて、液滴の吐出量及び/又は吐出のタイミングを決定することを特徴とする。
本発明の画像形成装置の記録ヘッド駆動制御方法は、駆動波形を生成する駆動波形生成ステップと、駆動波形生成ステップにより生成された駆動波形を送信する記録ヘッド制御ステップと、記録ヘッド制御ステップにより送信された駆動波形基づいて、主走査方向に走査するキャリッジに設けられ、液滴を吐出する記録ヘッドを駆動する記録ヘッド駆動ステップと、を有し、駆動波形生成ステップは、最低限の液滴吐出を行う基本波形を複数回繰り返す駆動波形を生成することを特徴とする。
本発明の画像形成装置の記録ヘッド駆動制御方法は、複数回繰り返す基本波形から波形を選択する波形選択ステップをさらに有し、記録ヘッド駆動ステップは、波形選択ステップにより選択された波形に基づいて、液滴の吐出量及び/又は吐出のタイミングを決定することを特徴とする。
本発明によれば、駆動波形の信号の引き回しが複雑化することを回避することが可能となる。
以下に本発明の実施形態の例について、図面を用いて詳細に説明する。
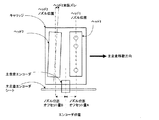
図1は、本実施形態に係る画像形成装置であるインクジェットプリンタの概略構成例を示す。以下、画像形成装置の例としてインクジェットプリンタについて説明する。すなわち、本実施形態の画像形成装置が吐出する液滴の例としてインクを用いている。図示するように、本実施形態に係る画像形成装置は、キャリッジ1、ガイドロット2、主走査モータ3、プーリー4、エンコーダシート5、エンコーダセンサ6、副走査モータ7、記録ヘッド9を備えている。
キャリッジ1は、ガイドロット2で保持され、主走査モータ3との間に渡されたプーリー4を介して主走査方向に走査する。このキャリッジ1には、例えばイエロー(Y)、シアン(C)、マゼンタ(M)、ブラック(K)の各色のインクを吐出する記録ヘッド9が搭載されており、記録ヘッド9に配列されたインク吐出ノズル10からインクを吐出することが可能である。キャリッジ1を主走査方向に移動させながら必要な位置でインクを吐出することによって記録媒体上に画像を形成する。
キャリッジ1の位置情報は、筐体に固定されたエンコーダシート5に等間隔で記録されたパターンを、キャリッジ1に固定されたエンコーダセンサ6で移動しながら読み取ることにより、カウントを加算/減算することで得る事ができる。
このような主走査方向のキャリッジ移動とインク吐出動作を1回行うことで、ノズル列の長さと同じ幅のバンドに対して画像を形成することができる。1バンド分の画像形成が終了したら副走査モータ7を駆動して記録媒体を副走査方向に移動させ、再度1バンド分の画像形成動作をさせるように繰り返せば、記録媒体の任意の場所に画像を形成することができる。
また、上述したように主走査方向のキャリッジ移動とインク吐出動作を1回行うことにより1バンド分の画像を形成するのではなく、複数回キャリッジを往復させることにより、1バンド分の画像を形成させるようにすることも可能である。
図2は、本実施形態に係る画像形成装置の機能例を示す。図示するように、本実施形態に係る画像形成装置は、CPU(Central Processing Unit)20、ROM(Read-Only Memory)21、RAM(Random Access Memory)22、ホストインターフェース(ホストI/F)23、記録ヘッド制御部24、主走査制御部25、副走査制御部26、駆動波形生成部27、記録ヘッド駆動部31〜34、記録ヘッド35〜38、主走査エンコーダ39、主走査モータ40、副走査エンコーダ41、副走査モータ42を有する。
CPU20は、ROM21に格納された制御プログラムに従って、各部を制御する。ROM21は、画像形成装置のハードウェア制御を行うファームウェアや記録ヘッド35〜38の駆動波形データを格納しているメモリである。駆動波形生成部27は、ROM21に保存されたデータに基づいて駆動波形を生成する。RAM22は、印刷データなどを保存することや、CPU20の作業領域として使用されるメモリである。ホストI/F23は、有線又は無線でホストPC(Personal Computer)10と接続され、データの送受信を行う。
ホストPC10から画像データ等の印刷ジョブを受信すると、CPU20は、画像データをRAM22に格納し、記録ヘッド35〜38が搭載されたキャリッジを主走査制御部25によって記録媒体上の任意の位置に移動させる。
記録ヘッド制御部24は、主走査エンコーダ39から得られるキャリッジの位置情報に連動し、RAM22に格納された画像データ、ROM21に格納された記録ヘッド駆動波形及び制御信号を記録ヘッド駆動部31〜34に転送する。記録ヘッド駆動部31〜34は、記録ヘッド制御部24より転送されたデータに基づいて、記録ヘッド35〜38を駆動し、インクを吐出する。
次に、本実施形態に係る画像形成装置のインク着弾位置のズレの例について、図3及び図4に示す図を用いて説明する。図3に示すように、キャリッジは、複数の記録ヘッドと、キャリッジ位置を測定する主走査エンコーダと、を備えており、主走査移動方向に沿って、往復移動する。また、主走査エンコーダにより測定される位置と各記録ヘッドには、メカ的なオフセット量、すなわちここでいうノズル位置オフセットが存在する。
インクの吐出は、主走査エンコーダにより測定されるインク着弾位置(X)に対し、オフセット量を加減算した位置で行う。以下にキャリッジ往復路でのインクの吐出のタイミングを算出する式を示す。
キャリッジ往路でのインク吐出タイミング
ヘッド1のインク着弾位置(X)への吐出タイミング=X−ノズル位置オフセット量A
ヘッド2のインク着弾位置(X)への吐出タイミング=X+ノズル位置オフセット量B
ヘッド1のインク着弾位置(X)への吐出タイミング=X−ノズル位置オフセット量A
ヘッド2のインク着弾位置(X)への吐出タイミング=X+ノズル位置オフセット量B
キャリッジ復路でのインク吐出タイミング
ヘッド1のインク着弾位置(X)への吐出タイミング=X+ノズル位置オフセット量A
ヘッド2のインク着弾位置(X)への吐出タイミング=X−ノズル位置オフセット量B
ヘッド1のインク着弾位置(X)への吐出タイミング=X+ノズル位置オフセット量A
ヘッド2のインク着弾位置(X)への吐出タイミング=X−ノズル位置オフセット量B
尚、図3ではヘッドを2つ備える画像形成装置について説明したが、ヘッドの数は特にこれに限定されることはなく、ヘッドの数が増えることにより、ノズル位置オフセット量が多くなることは明確である。
上述したように、インク吐出のタイミングは、ノズル位置オフセット量を考慮して決定される。しかし、図4に示すように、ヘッド組み付け誤差により、インク着弾位置にズレが生じる場合がある。図示するように、ヘッド位置にズレがない正規のインク着弾は、エンコーダ着弾位置(X)を中心として、ヘッド1及びヘッド2のインク吐出によるドットが形成されている。すなわち、エンコーダにより測定されるインク着弾位置(X)に対するインクの着弾位置にズレは発生しない。
一方、ヘッド2の組み付けに誤差が生じた場合には、インクの着弾位置は、組み付け上の誤差分だけズレが生じる。図4では、ヘッド2に組み付け誤差が発生した場合を示している。
次に、本発明の実施形態の例として、画像形成装置のヘッド駆動制御方法について説明する。
(実施形態1)
図5及び図6は、本実施形態に係る画像形成装置の駆動波形の構成例を説明するための図である。本実施形態に係る画像形成装置では、記録媒体に記録するインク滴のサイズとして、最大滴、中滴、最小滴、インク滴なしの4階調である場合を例に挙げて説明する。
図5及び図6は、本実施形態に係る画像形成装置の駆動波形の構成例を説明するための図である。本実施形態に係る画像形成装置では、記録媒体に記録するインク滴のサイズとして、最大滴、中滴、最小滴、インク滴なしの4階調である場合を例に挙げて説明する。
本実施形態に係る画像形成装置における駆動波形は、インク滴が最大、中、最小となる3つの駆動を行う基本波形を使用し、基本波形をエンコーダ周期内にn回繰り返すことで構成される。図5には、本実施形態の基本駆動波形の例を示しており、最大滴をL3、中滴をL2、最小滴をL1と示している。尚、図6では、基本波形をエンコーダ周期内に3回繰り返した場合の波形を例といて記載しているが、主走査エンコーダ周期内であれば、繰り返し回数は任意に設定することが可能である。
図7は、本実施形態に係る画像形成装置によるインク着弾位置補正方法の例を示す。図7では、インク滴が最大滴の場合を例に挙げて説明するが、中滴及び最小滴の場合も以下に示す方法と同様に補正を行う。
図示するように、大滴のインク滴量を、基本駆動波形のL3+L2+L2+L1により生成する。すなわち、本実施形態では、基本波形からL3+L2+L2+L1の波形部分を選択し、選択された波形に基づいて液滴の吐出量を決定する。ヘッドにズレが無い場合の各インク吐出を、図中に示す基本のタイミングとする。基本のタイミングとしては、L3、L2、L2、L1の順に吐出し、基本駆動波形の2回目のL1が吐出された時が大滴の着弾位置となる。
一方、ヘッドにズレが発生した場合に行う補正について、補正したタイミング1及び2に示す。図示するように、補正したタイミング1では、1回目の基本駆動波形のL3から、L3、L2、L1、L2の順に吐出し、基本駆動波形の2回目のL2を吐出する時が大滴の着弾位置となる。この場合、基本のタイミングよりも早いタイミングで大滴が記録媒体に着弾する。
補正したタイミング2では、1回目の基本駆動波形ではレディ信号はOFFとなっており、2回目の基本駆動波形のL2から、L2、L1、L3、L2の順に吐出し、基本駆動波形の3回目のL2吐出の時が大滴の着弾位置となる。この場合、基本のタイミングよりも遅いタイミングで大滴が記録媒体に着弾する。
上述したように、本実施形態では、駆動波形を変更することなく、基本波形から波形部分を選択し、レディ信号により、各インクの吐出タイミングを変更することにより、インク着弾の位置を補正している。すなわち、1つの駆動波形を用いて複数ヘッドの着弾位置の補正を行うので、駆動波形とレディ信号をヘッド毎に生成する必要がなくなり、駆動波形関連信号の配線の複雑化を回避することが可能となる。また、エンコーダ周期に依存しない吐出タイミング補正をすることも可能となる。
(実施形態2)
次に、本発明の他の実施形態の例について説明する。図8は、本実施形態に係る画像形成装置の基本駆動波形の例を示す。上述した実施形態1と同様に、本実施形態に係る記録インク滴サイズは4階調を例として挙げている。
次に、本発明の他の実施形態の例について説明する。図8は、本実施形態に係る画像形成装置の基本駆動波形の例を示す。上述した実施形態1と同様に、本実施形態に係る記録インク滴サイズは4階調を例として挙げている。
本実施形態では、基本の駆動波形のインク滴サイズを、2進数展開などに代表される符号に符号化し、各インク滴を組み合わせで表す事でインク着弾位置の補正を行う。図12に示す例では、最小滴L1を基数にして2進数展開を行い、中滴L2=L1+L1、最大滴L3=L1+L1+L1+L1で表している。
図9は、本実施形態に係る画像形成装置の2進数展開によるインク着弾位置補正方法の例を示す。図示するように、大滴のインク滴量を、基本駆動波形のL3+L2+L2+L1により生成する。ヘッドにズレが無い場合の各インク吐出を、図中に示す基本のタイミングとする。基本のタイミングとしては、L3、L2、L2、L1の順に吐出し、基本駆動波形の2回目のL1が吐出された時が大滴の着弾位置となる。
一方、ヘッドにズレが発生した場合に行う補正について、補正したタイミング1及び2に示す。ここで、図8に示すように、最大滴L3=L1+L1+L1+L1=L2+L2である。補正したタイミング1及び2では、L2+L2をL3に置き換えている。まず、補正したタイミング1では、1回目の基本駆動波形のL3から、L3、L1、L3の順に吐出し、基本駆動波形の2回目のL3を吐出する時が大滴の着弾位置となる。この場合、基本のタイミングよりも早いタイミングで大滴が記録媒体に着弾する。
補正したタイミング2では、1回目の基本駆動波形ではレディ信号はOFFとなっており、2回目の基本駆動波形のL3から、L3、L1、L3の順に吐出し、基本駆動波形の3回目のL3吐出の時が大滴の着弾位置となる。この場合、基本のタイミングよりも遅いタイミングで大滴が記録媒体に着弾する。
本実施形態により、インク吐出量を2進数展開する事で、小滴、中滴の組み合わせで、中滴、大滴を形成する事が可能となる。すなわち、基本のタイミングで、大滴を形成するのにL3+L2+L2+L1を必要とした場合、タイミングを補正する為、大滴をL3+L3+L1に置き換え、インク吐出タイミングを変更することで、駆動波形を変更することなく、インク着弾位置を補正する事が可能となる。
尚、本実施形態では小滴及び中滴の組み合わせで中滴及び大滴を形成する例について説明したが、基本波形をエンコーダ周期内に、3回以上繰り返す場合には、小滴のみで中滴及び大滴を形成できることは明らかであり、その他様々な組み合わせを適用することができることは言うまでもない。
(実施形態3)
図10は、ヘッド2が斜めに組み付けられ、組み付け誤差が発生した場合の例を示す。図11は、図10に示したようにヘッド2が斜めに組み付けられ、組み付け誤差が発生した場合のインク着弾位置の例を示す。図12は、斜めに組み付けられたヘッドから吐出されるインクの着弾位置の補正方法例を示す。図13は、インク着弾位置ズレを補正した後のインク着弾位置の例を示す。本実施形態では、斜めに組み付けられたヘッドから吐出されるインクの着弾位置ズレを補正する方法について、図10〜図13に示す図を用いて説明する。
図10は、ヘッド2が斜めに組み付けられ、組み付け誤差が発生した場合の例を示す。図11は、図10に示したようにヘッド2が斜めに組み付けられ、組み付け誤差が発生した場合のインク着弾位置の例を示す。図12は、斜めに組み付けられたヘッドから吐出されるインクの着弾位置の補正方法例を示す。図13は、インク着弾位置ズレを補正した後のインク着弾位置の例を示す。本実施形態では、斜めに組み付けられたヘッドから吐出されるインクの着弾位置ズレを補正する方法について、図10〜図13に示す図を用いて説明する。
図10に示すように、キャリッジに搭載される複数のヘッドは、組み立て時の精度誤差により、斜めに組み付けられる場合がある。図では、ヘッドが2つである場合を例として示している。図10に示すように、ヘッド2が斜めに組み付けられた場合のインク着弾位置の例を、図11に示す。図示するように、ヘッド先端方向で主走査方向に対し前へ着弾位置ズレが発生し、ヘッド中央部ではズレがなく、ヘッド後端部では主走査方向に対し後ろへ着弾位置ズレが発生する。このように、ヘッドが斜めに組み付けられた場合には、ヘッドの先端部、中央部、後端部で、異なるインクの着弾位置ズレが発生し、画質の劣化が発生する。
上述したような、ヘッド2が斜めに組み付けられた場合のインク着弾位置の補正は、図12に示すように、1つのヘッドに、2つのレディ信号を入力し、それぞれのインク吐出タイミングを調整することで行う。図示するように、大滴のインク滴量を、基本駆動波形のL3+L2+L2+L1により生成する。ヘッドにズレが無い場合の各インク吐出を、図中に示す基本のタイミングとする。基本のタイミングとしては、1回目の基本駆動波形のL3から、L3、L2、L2、L1の順に吐出し、基本駆動波形の2回目のL1が吐出された時が大滴の着弾位置となる。
ヘッド先端部へのマスク信号では、1回目の基本駆動波形のL2から、L2、L2、L1、L3の順に吐出し、基本駆動波形の3回目のL3吐出の時が大滴の着弾位置となるようにする。この場合、基本のタイミングよりも遅いタイミングで大滴が記録媒体に着弾する。
ヘッド後端部へのマスク信号では、1回目の基本駆動波形のL3から、L3、L2、L1、L2の順に吐出し、基本駆動波形の2回目のL2を吐出する時が大滴の着弾位置となる。この場合、基本のタイミングよりも早いタイミングで大滴が記録媒体に着弾する。
このように、ヘッドを分割したブロック毎に補正を行うことで、ヘッド先端部の着弾位置が遅くなり、ヘッド後端部の着弾位置が早くなる。インク着弾位置ズレの補正後のインク着弾位置を図13に示す。図示するように、図11に示す着弾位置に比べると、ヘッド先端部ではインク着弾位置が遅くなっており、ヘッド後端部ではインク着弾位置が早くなっていることにより、全体として着弾位置のズレが少なくなっていることが明らかである。
本実施形態により、ヘッドに2種類のレディ信号を入力し、着弾位置ズレを補正した場合、ヘッド中央部を中心にして着弾位置ズレを補正し、画質の劣化を減少することが可能となる。
また、本実施形態で説明したインク着弾位置の補正を、キャリッジの往路での補正であるとした場合、キャリッジの復路において、ヘッド先端部及びヘッド後端部の吐出タイミングを反転することによって、キャリッジ往復時において、ヘッドの傾きによるインク着弾位置ズレの補正を行うことが可能となる。
尚、本実施形態では、ヘッドをヘッド先端部とヘッド後端部との2つのブロックにわけ、分割したブロック毎にレディ信号を入力し、インク着弾位置を補正する例について説明した。しかし、ブロック数はいくつ設けても良く、制御信号はレディ信号に限定されることがないのは言うまでもない。
以上、好適な実施の形態に基づき具体的に説明したが、本発明は上述した画像形成装置及びそのヘッド駆動制御方法に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であるということは言うまでもない。
1 キャリッジ
3 主走査モータ
6 エンコーダセンサ
7 副走査モータ
9 記録ヘッド
10 インク吐出ノズル
3 主走査モータ
6 エンコーダセンサ
7 副走査モータ
9 記録ヘッド
10 インク吐出ノズル
Claims (10)
- 主走査方向に走査するキャリッジと、
前記キャリッジに設けられ、液滴を吐出する記録ヘッドと、を有し、前記液滴吐出の制御を駆動波形により行う画像形成装置であって、
前記記録ヘッドを駆動する記録ヘッド駆動手段と、
前記駆動波形を生成する駆動波形生成手段と、
前記駆動波形生成手段により生成された駆動波形を前記記録ヘッド駆動手段に送信する記録ヘッド制御手段と、を有し、
前記駆動波形生成手段は、最低限の液滴吐出を行う基本波形を複数回繰り返す駆動波形を生成することを特徴とする画像形成装置。 - 前記複数回繰り返す基本波形から波形を選択する波形選択手段をさらに有し、
前記記録ヘッド駆動手段は、前記波形選択手段により選択された波形に基づいて、前記液滴の吐出量を決定することを特徴とする請求項1記載の画像形成装置。 - 前記記録ヘッド駆動手段は、前記波形選択手段により選択された波形に基づいて、前記液滴を吐出するタイミングを決定することを特徴とする請求項2記載の画像形成装置。
- 前記記録ヘッドを複数有し、
前記複数の記録ヘッドの記録ヘッド駆動手段は、前記駆動波形生成手段により生成された基本波形を複数回繰り返す1つの駆動波形により液滴吐出のタイミングが決定されることを特徴とする請求項1から3の何れか1項に記載の画像形成装置。 - 前記記録ヘッドは、複数のブロックに分割され、
前記記録ヘッド駆動手段は、前記ブロックに前記波形選択手段により選択された波形を入力することにより前記液滴を吐出するタイミングを決定することを特徴とする請求項3又は4に記載の画像形成装置。 - 前記基本波形は、2進数展開されることを特徴とする請求項1から5の何れか1項に記載の画像形成装置。
- 前記波形選択手段は、レディ信号により基本波形から波形を選択することを特徴とする請求項2から6の何れか1項に記載の画像形成装置。
- 駆動波形を生成する駆動波形生成ステップと、
前記駆動波形生成ステップにより生成された駆動波形を送信する記録ヘッド制御ステップと、
前記記録ヘッド制御ステップにより送信された駆動波形基づいて、主走査方向に走査するキャリッジに設けられ、液滴を吐出する記録ヘッドを駆動する記録ヘッド駆動ステップと、を有し、
前記駆動波形生成ステップは、最低限の液滴吐出を行う基本波形を複数回繰り返す駆動波形を生成することを特徴とする画像形成装置の記録ヘッド制御方法。 - 前記複数回繰り返す基本波形から波形を選択する波形選択ステップをさらに有し、
記録ヘッド駆動ステップは、前記波形選択ステップにより選択された波形に基づいて、前記液滴の吐出量が決定されることを特徴とする請求項8記載の画像形成装置の記録ヘッド駆動制御方法。 - 前記記録ヘッド駆動ステップは、前記波形選択ステップにより選択された波形に基づいて、前記液滴を吐出するタイミングを決定することを特徴とする請求項9記載の画像形成装置の記録ヘッド駆動制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008148089A JP2009292048A (ja) | 2008-06-05 | 2008-06-05 | 画像形成装置及びそのヘッド駆動制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008148089A JP2009292048A (ja) | 2008-06-05 | 2008-06-05 | 画像形成装置及びそのヘッド駆動制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009292048A true JP2009292048A (ja) | 2009-12-17 |
Family
ID=41540693
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008148089A Withdrawn JP2009292048A (ja) | 2008-06-05 | 2008-06-05 | 画像形成装置及びそのヘッド駆動制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009292048A (ja) |
-
2008
- 2008-06-05 JP JP2008148089A patent/JP2009292048A/ja not_active Withdrawn
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9895893B2 (en) | Printer and printing method | |
| JP2018079614A (ja) | 画像処理装置および画像処理方法 | |
| US20110157268A1 (en) | Printing apparatus, printing method, program and printing system | |
| JP5381530B2 (ja) | 印刷装置、及び、印刷装置の制御方法 | |
| JP4269332B2 (ja) | オンデマンド・インクジェットプリンタ及びその駆動方法、駆動装置 | |
| JP2006192636A (ja) | 液体吐出システム、液体吐出装置、液体吐出方法、プログラム、および液体吐出制御装置 | |
| JP4574599B2 (ja) | 記録装置 | |
| KR100754818B1 (ko) | 잉크젯 프린트 장치 및 화상 형성 장치 | |
| JP5972037B2 (ja) | インクジェット記録装置およびインクジェット記録方法 | |
| JP4035962B2 (ja) | 駆動信号の整形処理によりドット位置を調整する印刷 | |
| JP2011062828A (ja) | 印刷装置、及び、印刷装置の制御方法 | |
| JP4626648B2 (ja) | 一つの原駆動信号に基づいて行う複数の解像度モードによる印刷 | |
| JP2001334654A (ja) | 異なるタイミングで形成されるドット間の形成位置のずれの調整 | |
| US7441858B2 (en) | Printing method, printing system, and storage medium having program stored thereon | |
| JP2009292048A (ja) | 画像形成装置及びそのヘッド駆動制御方法 | |
| JP4182658B2 (ja) | 一つの原駆動信号に基づいて行う複数の解像度モードによる印刷 | |
| JP4658664B2 (ja) | インクジェットプリンタ | |
| JP4111204B2 (ja) | 印刷装置および印刷方法 | |
| JP2017209790A (ja) | 液滴吐出装置、液滴吐出方法 | |
| JP2005324359A (ja) | 印刷装置、調整用パターン、印刷方法、及び、印刷システム | |
| JP2007196490A (ja) | 印刷システム、プログラム及び印刷装置 | |
| JP4678131B2 (ja) | 印刷装置および印刷制御方法 | |
| JP4715945B2 (ja) | 印刷装置、印刷方法および記録媒体 | |
| JP2017154340A (ja) | 画像処理方法、画像処理装置、および印刷システム | |
| JP4543445B2 (ja) | 印刷装置、印刷方法および記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20110906 |