JP2010052875A - エレベーターのブレーキの制動力および保持力の点検方法 - Google Patents
エレベーターのブレーキの制動力および保持力の点検方法 Download PDFInfo
- Publication number
- JP2010052875A JP2010052875A JP2008218450A JP2008218450A JP2010052875A JP 2010052875 A JP2010052875 A JP 2010052875A JP 2008218450 A JP2008218450 A JP 2008218450A JP 2008218450 A JP2008218450 A JP 2008218450A JP 2010052875 A JP2010052875 A JP 2010052875A
- Authority
- JP
- Japan
- Prior art keywords
- car room
- distance
- brake
- hoistway
- braking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Abstract
【課題】従来のエレベーターのブレーキ制動力の点検方法は、停止信号が出力されたエレベーター位置と停止位置検出信号が出力されたエレベーター位置間距離と最大許容制動距離との比較に基づくものであるが、前記エレベーター間距離を求めるのに、エレベーター駆動用モータの回転数から求めるとロープの延び等による正確性の欠如、また、当該距離測定装置による場合はコストの増大との問題があった。
【解決手段】停止検出スイッチが動作する動作点におけるかご室と昇降路の特定箇所との距離Aと、かご室を一定速度で上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作にて前記停止したかご室と前記昇降路の特定箇所との距離Bとの差を求め、当該差が所定の制動距離C内にあるときに、前記ブレーキの制動力および保持力が適正であると判定する点検方法。
【選択図】図1
【解決手段】停止検出スイッチが動作する動作点におけるかご室と昇降路の特定箇所との距離Aと、かご室を一定速度で上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作にて前記停止したかご室と前記昇降路の特定箇所との距離Bとの差を求め、当該差が所定の制動距離C内にあるときに、前記ブレーキの制動力および保持力が適正であると判定する点検方法。
【選択図】図1
Description
エレベーターのブレーキの制動力および保持力が適正であるか否かを判定する点検方法に関する。
エレベーターのブレーキの制動力が正常であるか否かの判定手段として、かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室カムを検出すると停止位置検出信号を出力する停止位置検出スイッチとをエレベーターの昇降路に沿って上下に配設し、ブレーキテスト運転中に前記停止検出信号が出力されると、エレベーターに停止指令を出してブレーキを作用させ、前記停止位置検出信号が前記停止検出信号の出力より所定時間以内に出力されないときは、当該ブレーキが異常であるとして、異常表示器を点灯することは従来知られている判定手段である(特許文献1参照)。
特開平8−108983号公報。
特許文献1に示す従来の判定手段においては、停止検出信号が出力されたエレベーター位置と停止位置検出信号が出力されたエレベーター位置間距離を、エレベーターをロープを介して駆動するモータの回転数をロータリーエンコーダにより換算して求めると、当該ロープの延びにより正確に当該距離を検出できない問題があるばかりでなく、前記テストモード用の運転制御プログラムの構築と、当該判定結果を外部出力する発報装置を設置することによるコスト増の問題も生じる。
さらに、既設のエレベーターに至っては改造費用によるさらなるコスト増の問題、特にリレー制御の古い既設のエレベーターに至っては前記のような運転制御を行うことは不可能であるから大規模に制御のリニューアルが必要となる問題があった。
さらに、既設のエレベーターに至っては改造費用によるさらなるコスト増の問題、特にリレー制御の古い既設のエレベーターに至っては前記のような運転制御を行うことは不可能であるから大規模に制御のリニューアルが必要となる問題があった。
本発明は上記課題を解決するためになされたものであって、現在の設備構成を変更することなく、すなわちコストをかけることなく、エレベーターのブレーキの制動力及び保持力が正常であるか否かを判定することができる方法の提供を目的とする。
請求項1に記載の発明は、
昇降路内を昇降するかご室と、前記かご室の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記停止検出スイッチが動作する動作点における前記かご室と昇降路の特定箇所との距離Aを測定し、次に、前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記かご室と前記昇降路の特定箇所との距離Bを測定し、距離Bと距離Aの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴とする。
昇降路内を昇降するかご室と、前記かご室の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記停止検出スイッチが動作する動作点における前記かご室と昇降路の特定箇所との距離Aを測定し、次に、前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記かご室と前記昇降路の特定箇所との距離Bを測定し、距離Bと距離Aの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴とする。
また、請求項2記載の発明は、
昇降路内を昇降するかご室と、前記かご室とロープで結合され、巻上機を介してつるべ式に配設されるつりあい錘と、前記かご室および前記つりあい錘の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記停止検出スイッチが動作する動作点における前記つりあい錘と昇降路の特定箇所との距離Dを測定し、
次に、前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記つりあい錘と前記昇降路の特定箇所との距離Eを測定し、距離Dと距離Eの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴とする。
昇降路内を昇降するかご室と、前記かご室とロープで結合され、巻上機を介してつるべ式に配設されるつりあい錘と、前記かご室および前記つりあい錘の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記停止検出スイッチが動作する動作点における前記つりあい錘と昇降路の特定箇所との距離Dを測定し、
次に、前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記つりあい錘と前記昇降路の特定箇所との距離Eを測定し、距離Dと距離Eの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴とする。
また、請求項3に記載の発明は、
昇降路内を昇降するかご室と、前記かご室の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記かご室と昇降路の特定箇所との距離Fを測定し、前記かご室を寸動下降させた後前記かご室が停止したままのときは、寸動下降をかご室の前記停止が解消されるまで繰返し、前記停止が解消されたときの前記かご室と前記昇降路の特定箇所との距離Gを測定し、前記距離Fと距離Gの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴とする。
昇降路内を昇降するかご室と、前記かご室の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記かご室と昇降路の特定箇所との距離Fを測定し、前記かご室を寸動下降させた後前記かご室が停止したままのときは、寸動下降をかご室の前記停止が解消されるまで繰返し、前記停止が解消されたときの前記かご室と前記昇降路の特定箇所との距離Gを測定し、前記距離Fと距離Gの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴とする。
請求項1に記載の発明によれば、かご室と昇降路の特定箇所との距離を測定することで、ブレーキの制動距離を測定し、ブレーキの制動力および保持力を判定することができるので、特別の設備や装置を要することなく、安価にブレーキの点検ができるとの効果を有する。
また、請求項2に記載の発明によれば、機械室を有しないエレベーターなど、ピット内で作業する場合においても、つりあい錘と昇降路の特定箇所との距離を測定することがで、ブレーキの制動距離を測定し、ブレーキの制動力および保持力を判定することができるので請求項1記載の発明と同様の効果が得られる。
また、請求項3に記載の発明によれば、ブレーキが動作してかご室が停止したときの、かご室と昇降路の特定箇所との距離と、次にかご室を寸動下降させた後、前記かご室が動かないときは、当該寸動下降を繰返し、かご室が動いたとときの前記かご室と昇降路の特定箇所との距離を測定することで、停止検出スイッチが動作する位置を目視で確認する必要がないので、昇降路内のかご上作業を不要とすることができ、より簡易に、特別な設備や装置を要することなく、安価にブレーキの点検ができる効果を有する。
また、請求項2に記載の発明によれば、機械室を有しないエレベーターなど、ピット内で作業する場合においても、つりあい錘と昇降路の特定箇所との距離を測定することがで、ブレーキの制動距離を測定し、ブレーキの制動力および保持力を判定することができるので請求項1記載の発明と同様の効果が得られる。
また、請求項3に記載の発明によれば、ブレーキが動作してかご室が停止したときの、かご室と昇降路の特定箇所との距離と、次にかご室を寸動下降させた後、前記かご室が動かないときは、当該寸動下降を繰返し、かご室が動いたとときの前記かご室と昇降路の特定箇所との距離を測定することで、停止検出スイッチが動作する位置を目視で確認する必要がないので、昇降路内のかご上作業を不要とすることができ、より簡易に、特別な設備や装置を要することなく、安価にブレーキの点検ができる効果を有する。
まず、本発明の第1の実施形態(以下「第1実施例」という)を、機械室を有するエレベーターを例に図1乃至図4、図7に基づいて説明する。
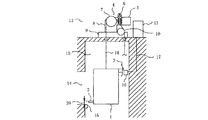
図1は、第1実施例におけるエレベーターの全体構成図である。
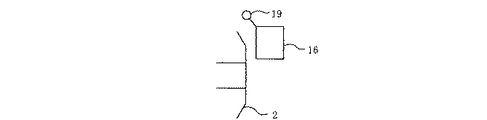
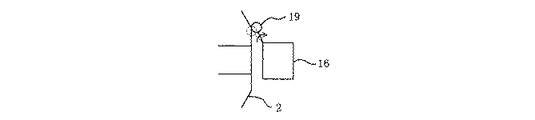
図2乃至図4はかご室カムと停止検出スイッチの位置関係とそのときの動作状態を示す部分拡大図で、図2はかご室カムと停止検出スイッチのレバーが接触していない停止検出スイッチ不動作状態を示し、図3はかご室カムによる停止検出スイッチの動作点を示し、図4は停止検出スイッチ動作後に続くブレーキ動作による制動距離(以下「スリップ距離」という)移動してかご室が停止したときのかご室カムと停止検出スイッチのレバーとの位置関係をそれぞれ示す。
図7は第1実施例の点検方法を説明するフローチャートである。
図1は、第1実施例におけるエレベーターの全体構成図である。
図2乃至図4はかご室カムと停止検出スイッチの位置関係とそのときの動作状態を示す部分拡大図で、図2はかご室カムと停止検出スイッチのレバーが接触していない停止検出スイッチ不動作状態を示し、図3はかご室カムによる停止検出スイッチの動作点を示し、図4は停止検出スイッチ動作後に続くブレーキ動作による制動距離(以下「スリップ距離」という)移動してかご室が停止したときのかご室カムと停止検出スイッチのレバーとの位置関係をそれぞれ示す。
図7は第1実施例の点検方法を説明するフローチャートである。
図1について説明する。
昇降路13内には、かご室カム2と、かご室敷居3を備えたかご室1と、前記かご室カム2と協働する停止検出スイッチ16と、シーブ7、ビームプーリー10を介して前記かご室1と図示しないつりあい錘と連結するロープ18が配設され、当該昇降路13の上には、機械室12が配置され、当該機械室12には、ビームプーリー10を備えたマシンビーム9上に、モータ5、ブレーキ6、シーブ7,減速機8からなる巻上機4と、制御盤11が設置され、当該制御盤は11は配線17を介して停止検出スイッチ16と接続している。
また、前記昇降路13には、最上階乗場開口部14が図示されており、当該開口部14の下端に最上階乗場敷居15が設置されている。
さらに、当該開口部14には図示しないドアが設置され、当該ドアは、かご室敷居3と最上階乗場敷居15の水平高さ間距離(以下「敷居間距離20」という)が所定距離以内でない場合は通常閉じられており、点検時などにおいては、専用のキー又は開放治具を使うことで、前記敷居間距離20に関わらずドアの開放が可能となっている。
昇降路13内には、かご室カム2と、かご室敷居3を備えたかご室1と、前記かご室カム2と協働する停止検出スイッチ16と、シーブ7、ビームプーリー10を介して前記かご室1と図示しないつりあい錘と連結するロープ18が配設され、当該昇降路13の上には、機械室12が配置され、当該機械室12には、ビームプーリー10を備えたマシンビーム9上に、モータ5、ブレーキ6、シーブ7,減速機8からなる巻上機4と、制御盤11が設置され、当該制御盤は11は配線17を介して停止検出スイッチ16と接続している。
また、前記昇降路13には、最上階乗場開口部14が図示されており、当該開口部14の下端に最上階乗場敷居15が設置されている。
さらに、当該開口部14には図示しないドアが設置され、当該ドアは、かご室敷居3と最上階乗場敷居15の水平高さ間距離(以下「敷居間距離20」という)が所定距離以内でない場合は通常閉じられており、点検時などにおいては、専用のキー又は開放治具を使うことで、前記敷居間距離20に関わらずドアの開放が可能となっている。
図2乃至図4について説明する。
停止検出スイッチ16は、かご室1の最上階乗場開口部14より上方への行き過ぎを防止するために設けられたスイッチで、そのスイッチレバー19が、かご室カム2に接触すると図3に示すようにその動作点において停止検出スイッチ16から停止検出信号が配線17を介して制御盤11に出力され、当該接触が解除されると当該停止検出信号の制御盤11への出力は停止する。
一方、当該停止信号を受けた制御基板11は巻上機4のブレーキ6動作を開始させて、かご室1を停止させるものであるが、当該ブレーキ6動作の開始から停止するまでの制動距離21(以下「スリップ距離21」という)移動する。
このときのかご室1の移動速度は、通常運転時よりも低速で、一般的には15〜30m/minの定速度で運転される。
停止検出スイッチ16は、かご室1の最上階乗場開口部14より上方への行き過ぎを防止するために設けられたスイッチで、そのスイッチレバー19が、かご室カム2に接触すると図3に示すようにその動作点において停止検出スイッチ16から停止検出信号が配線17を介して制御盤11に出力され、当該接触が解除されると当該停止検出信号の制御盤11への出力は停止する。
一方、当該停止信号を受けた制御基板11は巻上機4のブレーキ6動作を開始させて、かご室1を停止させるものであるが、当該ブレーキ6動作の開始から停止するまでの制動距離21(以下「スリップ距離21」という)移動する。
このときのかご室1の移動速度は、通常運転時よりも低速で、一般的には15〜30m/minの定速度で運転される。
次に、ブレーキ6の制動力および保持力の点検方法を図7のフローチャートに基づいて説明する前に点検時のエレベーター動作について説明する。
点検時、かご室1上の図示しない操作機による上昇および下降の操作信号、または、制御盤11の直接操作による上昇および下降の操作により、ブレーキ6を開放し、モータ5を起動し、そのモータ5の動力により減速機8を介してシーブ7を回転させることによりロープ18を移動して、当該ロープにつり下げられているかご室1を上昇、および下降させる運転を行う。
ここで、前記運転によりスイッチレバー19と、かご室カム2が接触して停止検出スイッチ16から停止検出信号が制御盤11に出力されると、制御盤11はモータ5の停止と同時にブレーキ6を動作し、かご室1の運転を停止する。
点検時、かご室1上の図示しない操作機による上昇および下降の操作信号、または、制御盤11の直接操作による上昇および下降の操作により、ブレーキ6を開放し、モータ5を起動し、そのモータ5の動力により減速機8を介してシーブ7を回転させることによりロープ18を移動して、当該ロープにつり下げられているかご室1を上昇、および下降させる運転を行う。
ここで、前記運転によりスイッチレバー19と、かご室カム2が接触して停止検出スイッチ16から停止検出信号が制御盤11に出力されると、制御盤11はモータ5の停止と同時にブレーキ6を動作し、かご室1の運転を停止する。
次に、ブレーキ6の制動力および保持力の点検方法を図7のフローチャートに基づいて説明する。
ブレーキ6の制動力および保持力は、かご室1を無負荷状態にして、一定速度、かつ低速度で上昇させ、ブレーキ6を動作させてから停止するまでのスリップ距離で判定するものであるが、当該スリップ距離と同等な距離として、本発明は無負荷状態にして、一定速度、かつ低速度で上昇させ、かご室1が停止したときのかご室敷居と停止階の敷居間の距離が最大許容スリップ距離以内であるか否かを判定するもので、詳細をフローチャートに従って説明する。
ブレーキ6の制動力および保持力は、かご室1を無負荷状態にして、一定速度、かつ低速度で上昇させ、ブレーキ6を動作させてから停止するまでのスリップ距離で判定するものであるが、当該スリップ距離と同等な距離として、本発明は無負荷状態にして、一定速度、かつ低速度で上昇させ、かご室1が停止したときのかご室敷居と停止階の敷居間の距離が最大許容スリップ距離以内であるか否かを判定するもので、詳細をフローチャートに従って説明する。
かご室1を、最上階乗場開口部14からかご室1の上に乗ることが可能な位置に停止させ、当該停止したかご室1の上に作業者甲が乗って(ステップS40)、かご室1の上に設置された図示しない操作器を操作してかご室1を上昇運転し、停止検出スイッチ16の近傍に達したら、停止検出スイッチ16の正確な動作点にかご室1を止めるために作業者甲は、スイッチレバー19の動きを目視で確認しながら、かご室1の寸動運転を行って図3の点線で示される停止検出スイッチ16の作動点で停止させる(ステップS41)。
次いで、作業者乙がかご室敷居3と最上階乗場敷居15との敷居間距離20を計測しその計測距離Aを記憶し(ステップS42)、その後、作業者甲がかご室1の上から最上階乗場開口部14に降りることができる位置迄かご1を下降運転して、作業者甲がかご室1から最上階乗場に降りる(ステップS43)。
前記ステップS43で最上階乗場に降りた作業者甲は、機械室12に設置されている制御盤11の操作盤によりかご室1を低速上昇運転し(ステップS44)、当該上昇運転により、かご室カム2がスイッチレバー19に接触して停止検出スイッチ16の動作点に至って停止検出信号を出力すると、ブレーキが動作して、かご室1は停止検出スイッチ16の動作点から図4に示すスリップ距離21だけ移動して停止する(ステップS45)。
前記ステップS43で最上階乗場に降りた作業者甲は、機械室12に設置されている制御盤11の操作盤によりかご室1を低速上昇運転し(ステップS44)、当該上昇運転により、かご室カム2がスイッチレバー19に接触して停止検出スイッチ16の動作点に至って停止検出信号を出力すると、ブレーキが動作して、かご室1は停止検出スイッチ16の動作点から図4に示すスリップ距離21だけ移動して停止する(ステップS45)。
次いで、作業者乙がかご室敷居3と最上階乗場敷居15との敷居間距離20を計測しその計測距離Bを記憶し(ステップS46)、前記計測距離Bから計測距離Aを減算した減算値がブレーキ6の許容最大スリップ距離C以内であるか否か判定し(ステップS47)、当該判定が許容最大スリップ距離C以内であるとの判定のときは、ブレーキ6のブレーキの制動力および保持力は正常と判断して、当該ブレーキの制動力および保持力の点検を終了する(ステップS48)。
一方、前記ステップS47の判定が距離C以内でないとの判定のときは、異常と判定し(ステップS49)、ブレーキ6を調整して(ステップS50)スタートに戻り、前記ステップを正常判定となるまで繰り返す。
一方、前記ステップS47の判定が距離C以内でないとの判定のときは、異常と判定し(ステップS49)、ブレーキ6を調整して(ステップS50)スタートに戻り、前記ステップを正常判定となるまで繰り返す。
次に、本発明の第2の実施形態(以下「第2実施例」という)について、機械室を有するエレベーターを例に、図2乃至図4,図5、図8に基づいて説明する。
第1実施例における符号と同一の符号で示される構成は、第1実施例と同一であるか対応する構成であるから、その説明は省略する。
図5は、第2実施例におけるエレベーターの全体構成図である。
図8は、第2実施例の点検方法を説明するフローチャートである。
第1実施例における符号と同一の符号で示される構成は、第1実施例と同一であるか対応する構成であるから、その説明は省略する。
図5は、第2実施例におけるエレベーターの全体構成図である。
図8は、第2実施例の点検方法を説明するフローチャートである。
図5において第1実施例と相違する点ついて説明する。
ビームプーリー10、シーブ7を介してロープ18にてつるべ式にかご室1と結合するつりあい錘22の真下に、ロープ18が切断してつりあい錘22が落下したときにピット24の床への衝撃を緩和する緩衝器23が離隔して配設されている点、
操作器26を操作し、その操作信号が配線27、ピット24に配設されている操作箱25、配線28を介して制御盤11に入力されてかご室1の昇降運転および下降運転を操作できる点、
最下階乗場開口部29、および最下階乗場開口部29の下端に最下階乗場敷居30が設けられている点である。
また、最下階乗場開口部29にドアが設けられている点、および当該ドアの動作は第1実施例における最上階乗場開口部14に設けられているドアと同様である。
ビームプーリー10、シーブ7を介してロープ18にてつるべ式にかご室1と結合するつりあい錘22の真下に、ロープ18が切断してつりあい錘22が落下したときにピット24の床への衝撃を緩和する緩衝器23が離隔して配設されている点、
操作器26を操作し、その操作信号が配線27、ピット24に配設されている操作箱25、配線28を介して制御盤11に入力されてかご室1の昇降運転および下降運転を操作できる点、
最下階乗場開口部29、および最下階乗場開口部29の下端に最下階乗場敷居30が設けられている点である。
また、最下階乗場開口部29にドアが設けられている点、および当該ドアの動作は第1実施例における最上階乗場開口部14に設けられているドアと同様である。
次に、ブレーキ6の制動力および保持力の点検方法を図8のフローチャートに基づいて説明する前に点検時のエレベーター動作について説明する。
点検時には、操作器26による上昇運転、および下降運転の操作信号が制御盤11を介して巻上機4のブレーキ6を開放し、モータ5を起動し、当該モータ5の動力により減速機8を介してシーブ7を回転させることによりロープ18を移動し、当該ロープにつり下げられているかご室1を上昇、および下降させる運転を行う。
このとき、かご室1とロープ18で連結されたつりあい錘22は、シーブ7、ビームプーリー10を介してつるべ式に配設されているため、かご室1が上昇すると反対に下降し、かご室1が下降すると反対に上昇するように昇降路13内を通常運転時より低速な一定速度、一般的には15〜30m/minで変位する。
ここで、かご室1の最上階乗場開口部14より上方への行き過ぎ防止のために設けられた停止検出スイッチ16のスイッチレバー19と、かご室カム2が接触して停止検出スイッチ16が停止検出信号を制御盤11に出力すると、モータ5の停止と同時にブレーキ6が動作し、かご室1の運転が停止する。
点検時には、操作器26による上昇運転、および下降運転の操作信号が制御盤11を介して巻上機4のブレーキ6を開放し、モータ5を起動し、当該モータ5の動力により減速機8を介してシーブ7を回転させることによりロープ18を移動し、当該ロープにつり下げられているかご室1を上昇、および下降させる運転を行う。
このとき、かご室1とロープ18で連結されたつりあい錘22は、シーブ7、ビームプーリー10を介してつるべ式に配設されているため、かご室1が上昇すると反対に下降し、かご室1が下降すると反対に上昇するように昇降路13内を通常運転時より低速な一定速度、一般的には15〜30m/minで変位する。
ここで、かご室1の最上階乗場開口部14より上方への行き過ぎ防止のために設けられた停止検出スイッチ16のスイッチレバー19と、かご室カム2が接触して停止検出スイッチ16が停止検出信号を制御盤11に出力すると、モータ5の停止と同時にブレーキ6が動作し、かご室1の運転が停止する。
ブレーキ6の制動力および保持力の点検方法を図8に基づいて説明する。
第2実施例も第1実施例と同様、ブレーキ6の動作開始からかご室1が停止する迄のスリップ距離で判定するものであるが、当該スリップ距離を、無負荷状態で低速度上昇させてブレーキ動作を開始させたときのつりあい錘22と緩衝器23との距離、すなわち、つりあい錘−緩衝器間距離31と、かご室1が停止したときのつりあい錘22と緩衝器23とのつりあい錘−緩衝器間距離31の差が最大許容スリップ距離Cの範囲内であるか否かを判定するもので、詳細をフローチャートに従って説明する。
第2実施例も第1実施例と同様、ブレーキ6の動作開始からかご室1が停止する迄のスリップ距離で判定するものであるが、当該スリップ距離を、無負荷状態で低速度上昇させてブレーキ動作を開始させたときのつりあい錘22と緩衝器23との距離、すなわち、つりあい錘−緩衝器間距離31と、かご室1が停止したときのつりあい錘22と緩衝器23とのつりあい錘−緩衝器間距離31の差が最大許容スリップ距離Cの範囲内であるか否かを判定するもので、詳細をフローチャートに従って説明する。
かご室1を、最上階乗場開口部14からかご室1の上に作業者甲が乗ることが可能な位置に停止させてかご室1の上に作業者甲が乗り(ステップS60)、かご室1の上に設置された図示しない操作器を操作してかご室1を上昇運転し、停止検出スイッチ16の近傍に達したら、停止検出スイッチ16の正確な動作点にかご室1を止めるために作業者甲は、スイッチレバー19が図3の点線で示される動きを目視で確認しながらかご室1の寸動運転を行って停止検出スイッチ16の動作点で停止させる(ステップS61)。
ここにいう「寸動運転」とは、検出誤差許容範囲以内の微少距離を移動させることを指す。
次いで、作業者乙が最下階開口部29からピット24内に入り、つりあい錘22と緩衝器23とのつりあい錘−緩衝器間距離31を計測し、当該計測距離Dを記憶し(ステップS62)、作業者乙が最下階開口部29からピット24外に出た後、作業者甲がかご室1の上から最上階乗場開口部14に降りることができる位置迄かご1を下降運転して、作業者甲がかご室1から最上階乗場に降りる(ステップS63)。
次に、作業者乙がピット24内の操作箱25に接続した操作器26を取り出し、操作器26を操作してかご室1を低速上昇運転する(ステップS64)。
次に、かご室カム2がスイッチレバー19に接触して停止検出スイッチ16が停止検出信号を制御盤11に出力するとブレーキ6が作動して図4に示されるスリップ距離21だけ移動してかご室1およびつりあい錘22は停止する(ステップS65)。
ここにいう「寸動運転」とは、検出誤差許容範囲以内の微少距離を移動させることを指す。
次いで、作業者乙が最下階開口部29からピット24内に入り、つりあい錘22と緩衝器23とのつりあい錘−緩衝器間距離31を計測し、当該計測距離Dを記憶し(ステップS62)、作業者乙が最下階開口部29からピット24外に出た後、作業者甲がかご室1の上から最上階乗場開口部14に降りることができる位置迄かご1を下降運転して、作業者甲がかご室1から最上階乗場に降りる(ステップS63)。
次に、作業者乙がピット24内の操作箱25に接続した操作器26を取り出し、操作器26を操作してかご室1を低速上昇運転する(ステップS64)。
次に、かご室カム2がスイッチレバー19に接触して停止検出スイッチ16が停止検出信号を制御盤11に出力するとブレーキ6が作動して図4に示されるスリップ距離21だけ移動してかご室1およびつりあい錘22は停止する(ステップS65)。
次に、作業者乙がピット24に入り、つりあい錘22と緩衝器23とのつりあい錘−緩衝器間距離31を測定し、その計測距離Eを記憶し(ステップS66)、前記計測距離Dからと計測距離Eを減算し、当該減算値がブレーキ6の許容最大スリップ距離C以内であるか否か判定し(ステップS67)、当該判定が距離C以内であるとの判定のときは、ブレーキ6のブレーキの制動力および保持力は正常と判断してブレーキの制動力および保持力の点検を終了する(ステップS68)。
一方、前記ステップS67の判定が距離C以内でないとの判定のときは、ブレーキ6のブレーキの制動力および保持力は異常と判定し(ステップS69)、ブレーキ6を調整して(ステップS70)スタートに戻り、前記ステップを正常判定となるまで繰り返す。
一方、前記ステップS67の判定が距離C以内でないとの判定のときは、ブレーキ6のブレーキの制動力および保持力は異常と判定し(ステップS69)、ブレーキ6を調整して(ステップS70)スタートに戻り、前記ステップを正常判定となるまで繰り返す。
前記第2実施例においては機械室12を有するエレベーターを例に説明したが、前記第2実施例に示す、ブレーキの制動力および保持力の点検方法によると、巻上機4および制御盤11がピット24内に設置された、機械室を有しないエレベーターにおいてもブレーキの制動力および保持力の点検ができる効果を奏する。
次に、本発明の第3の実施形態(以下「第3実施例」という)ついて、機械室を有するエレベーターを例に、図2乃至図4,図6、図9に基づいて説明する。
第1又は第2実施例における符号と同一の符号で示される構成は、第1又は第2実施例と同一であるか対応する構成であるから、その説明は省略する。
図6は、第3実施例におけるエレベーターの全体構成図である。
図9は、第3実施例の点検方法を説明するフローチャートである。
第1又は第2実施例における符号と同一の符号で示される構成は、第1又は第2実施例と同一であるか対応する構成であるから、その説明は省略する。
図6は、第3実施例におけるエレベーターの全体構成図である。
図9は、第3実施例の点検方法を説明するフローチャートである。
図6において第1、又は第2実施例と相違する点について説明する。
操作器26の操作信号が配線27、かご室1の上に配設されている操作箱32、図示しない配線を介して制御盤11に入力されてかご室1の昇降運転および下降運転を操作できる点である。
操作器26の操作信号が配線27、かご室1の上に配設されている操作箱32、図示しない配線を介して制御盤11に入力されてかご室1の昇降運転および下降運転を操作できる点である。
次に、ブレーキ6の制動力および保持力の点検方法を図9のフローチャートに基づいて説明する前に点検時のエレベーター動作について説明する。
点検に際しては、操作器26による上昇運転、および下降運転の操作信号が、制御盤11を介して巻上機4のブレーキ6を開放し、モータ5を起動し、当該モータ5の動力により減速機8を介してシーブ7を回転させることによりロープ18を移動し、当該ロープにつり下げられているかご室1を昇降路13内を上昇、および下降させる運転を行い、当該運転時のかご室1の移動速度は、通常運転時より低速な一定速度、一般的には15〜30m/minで移動する。
点検に際しては、操作器26による上昇運転、および下降運転の操作信号が、制御盤11を介して巻上機4のブレーキ6を開放し、モータ5を起動し、当該モータ5の動力により減速機8を介してシーブ7を回転させることによりロープ18を移動し、当該ロープにつり下げられているかご室1を昇降路13内を上昇、および下降させる運転を行い、当該運転時のかご室1の移動速度は、通常運転時より低速な一定速度、一般的には15〜30m/minで移動する。
ここで、ブレーキ6の制動力および保持力の点検方法を図9のフローチャートに基づいて説明する。
第3実施例も第1及び第2実施例と同様、ブレーキ6の動作開始からかご室1が停止する迄のスリップ距離で判定するものであるが、当該スリップ距離を、第3実施例では無負荷状態にして低速度上昇させ、ブレーキ動作を開始させたときの最上階乗場敷居とかご室敷居との距離と、とかご室1が停止したときの最上階乗場敷とかご室敷居との距離の差が最大許容スリップ距離の範囲内であるか否かを判定するもので、詳細をフローチャートに従って説明する。
第3実施例も第1及び第2実施例と同様、ブレーキ6の動作開始からかご室1が停止する迄のスリップ距離で判定するものであるが、当該スリップ距離を、第3実施例では無負荷状態にして低速度上昇させ、ブレーキ動作を開始させたときの最上階乗場敷居とかご室敷居との距離と、とかご室1が停止したときの最上階乗場敷とかご室敷居との距離の差が最大許容スリップ距離の範囲内であるか否かを判定するもので、詳細をフローチャートに従って説明する。
かご室1を、最上階乗場開口部14からかご室1の上の操作器26を取り出すことが可能な位置に停止させて操作器26を取り出し(ステップS80)、当該操作器26を操作してかご室1を上昇運転すると、スイッチレバー19が図3に示すようにかご室カム2と接触して停止検出スイッチ16の動作点に達して停止検出信号が制御盤11に出力されると、ブレーキ6が動作して図4に示されるスリップ距離21だけ移動してかご室1は停止する(ステップS82)。
次に、かご室敷居3と最上階乗場敷居15との敷居間距離20を測定し、その測定距離Fを記憶する(ステップS83)。
次に、操作器26を操作してかご室1を寸動下降運転を行い(ステップS84)その後かご室1が動いたか否か判定し(ステップS85)、当該判定が動かないとの判定のときは動くまでステップS84を繰り返す。
すなわち、前記ステップS84においてかご室1が動かないときは、停止検出スイッチ16が動作している状態、要するに、かご室カム3がスイッチレバー19と接触して停止検出スイッチ16から停止検出信号が制御盤11に出力されている状態となっているので、かご室1は操作器26の寸動下降運転により微少距離移動した後は停止状態となる。
そこで前記寸動下降を繰り返すと、かご室カム3とスイッチレバー19との位置関係が図4→図3→図2となって、かご室カム3とスイッチレバー19は非接触となるので停止検出スイッチ16から制御盤11に出力されていた停止検出信号が出力されなくなるので、ブレーキ6が開放される。
次に、かご室敷居3と最上階乗場敷居15との敷居間距離20を測定し、その測定距離Fを記憶する(ステップS83)。
次に、操作器26を操作してかご室1を寸動下降運転を行い(ステップS84)その後かご室1が動いたか否か判定し(ステップS85)、当該判定が動かないとの判定のときは動くまでステップS84を繰り返す。
すなわち、前記ステップS84においてかご室1が動かないときは、停止検出スイッチ16が動作している状態、要するに、かご室カム3がスイッチレバー19と接触して停止検出スイッチ16から停止検出信号が制御盤11に出力されている状態となっているので、かご室1は操作器26の寸動下降運転により微少距離移動した後は停止状態となる。
そこで前記寸動下降を繰り返すと、かご室カム3とスイッチレバー19との位置関係が図4→図3→図2となって、かご室カム3とスイッチレバー19は非接触となるので停止検出スイッチ16から制御盤11に出力されていた停止検出信号が出力されなくなるので、ブレーキ6が開放される。
一方、前記ステップS85にてかご室1が動いた場合は、その位置を停止検出スイッチ16の動作点とし、かご室敷居3最上階乗場敷居15との敷居間距離20を計測してその計測距離Gを記憶する(ステップS86)。
次に前記測定距離Fから測定距離Gを減算した減算値がブレーキ6の許容最大スリップ距離C以内であるか否か判定し(ステップS87)、当該判定が許容最大スリップ距離C以内であるとの判定のときは、ブレーキ6のブレーキの制動力および保持力は正常と判断してブレーキの制動力および保持力の点検を終了する(ステップS88)。
一方、前記ステップS67の判定が距離C以内でないとの判定のときは、ブレーキ6のブレーキの制動力および保持力は異常と判定し(ステップS89)、ブレーキ6を調整して(ステップS90)スタートに戻り、前記ステップを正常判定となるまで繰り返す。
次に前記測定距離Fから測定距離Gを減算した減算値がブレーキ6の許容最大スリップ距離C以内であるか否か判定し(ステップS87)、当該判定が許容最大スリップ距離C以内であるとの判定のときは、ブレーキ6のブレーキの制動力および保持力は正常と判断してブレーキの制動力および保持力の点検を終了する(ステップS88)。
一方、前記ステップS67の判定が距離C以内でないとの判定のときは、ブレーキ6のブレーキの制動力および保持力は異常と判定し(ステップS89)、ブレーキ6を調整して(ステップS90)スタートに戻り、前記ステップを正常判定となるまで繰り返す。
なお、上記第3実施例では停止検出スイッチ16として、かご室1の最上階乗場開口部14より上方への行き過ぎを防止するために設けられたスイッチを用いたが、当該停止検出スイッチとしてかご室1の最下階乗場開口部より下方への行き過ぎを防止するために設けられたスイッチを用いるときは、寸動させる方向が前記第3実施例と逆方向の上方になることは言うまでもないことである。
前記第3実施例の点検方法によれば、1人作業でブレーキの制動力および保持力の点検ができる効果がある。
1 かご室
2 かご室カム
3 かご室敷居
4 巻上機
5 モータ
6 ブレーキ
7 シーブ
8 減速機
9 マシンビーム
10 ビームプーリー
11 制御盤
12 機械室
13 昇降路
14 最上階乗場開口部
15 最上階乗場敷居
16 停止検出スイッチ
17 配線
18 ロープ
19 スイッチレバー
20 敷居間距離
21 つりあい錘
22 スリップ距離
23 緩衝器
24 ピット
25 操作箱
26 操作器
27 配線
28 配線
29 最下階乗場開口部
30 最下階乗場敷居
31 つりあい錘−緩衝器間距離
32 操作箱
33 敷居間距離
2 かご室カム
3 かご室敷居
4 巻上機
5 モータ
6 ブレーキ
7 シーブ
8 減速機
9 マシンビーム
10 ビームプーリー
11 制御盤
12 機械室
13 昇降路
14 最上階乗場開口部
15 最上階乗場敷居
16 停止検出スイッチ
17 配線
18 ロープ
19 スイッチレバー
20 敷居間距離
21 つりあい錘
22 スリップ距離
23 緩衝器
24 ピット
25 操作箱
26 操作器
27 配線
28 配線
29 最下階乗場開口部
30 最下階乗場敷居
31 つりあい錘−緩衝器間距離
32 操作箱
33 敷居間距離
Claims (3)
- 昇降路内を昇降するかご室と、前記かご室の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記停止検出スイッチが動作する動作点における前記かご室と昇降路の特定箇所との距離Aを測定し、次に、前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記かご室と前記昇降路の特定箇所との距離Bを測定し、距離Bと距離Aの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴としたエレベーターの制動および保持力の点検方法。 - 昇降路内を昇降するかご室と、前記かご室とロープで結合され、巻上機を介してつるべ式に配設されるつりあい錘と、前記かご室および前記つりあい錘の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記停止検出スイッチが動作する動作点における前記つりあい錘と昇降路の特定箇所との距離Dを測定し、
次に、前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記つりあい錘と前記昇降路の特定箇所との距離Eを測定し、距離Dと距離Eの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴としたエレベーターの制動および保持力の点検方法。 - 昇降路内を昇降するかご室と、前記かご室の昇降動作を制動および保持するブレーキと、前記かご室に固定されたかご室カムと、昇降路内に配設され、前記かご室カムを検出すると停止検出信号を出力する停止検出スイッチと、前記かご室を前記かご室から離れた位置で操作可能なかご操作器とを備えたエレベーターにおいて、
前記かご室を一定速度で上昇又は下降させ、当該上昇又は下降により前記停止検出スイッチの動作に続くブレーキ動作によりかご室を停止させ、当該停止した前記かご室と昇降路の特定箇所との距離Fを測定し、前記かご室を寸動下降させた後前記かご室が停止したままのときは、寸動下降をかご室の前記停止が解消されるまで繰返し、前記停止が解消されたときの前記かご室と前記昇降路の特定箇所との距離Gを測定し、前記距離Fと距離Gの差を求め、当該差が所定の制動距離C内にあるか否か判定し、当該判定が制動距離C内との判定のときに、前記ブレーキの制動力および保持力が適正であると判定することを特徴としたエレベーターの制動および保持力の点検方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008218450A JP2010052875A (ja) | 2008-08-27 | 2008-08-27 | エレベーターのブレーキの制動力および保持力の点検方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008218450A JP2010052875A (ja) | 2008-08-27 | 2008-08-27 | エレベーターのブレーキの制動力および保持力の点検方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010052875A true JP2010052875A (ja) | 2010-03-11 |
Family
ID=42069207
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008218450A Pending JP2010052875A (ja) | 2008-08-27 | 2008-08-27 | エレベーターのブレーキの制動力および保持力の点検方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010052875A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010280481A (ja) * | 2009-06-05 | 2010-12-16 | Mitsubishi Electric Corp | エレベーターの制御装置 |
| CN115028039A (zh) * | 2022-06-15 | 2022-09-09 | 永大电梯设备(中国)有限公司 | 一种电梯曳引装置的检测方法 |
| CN120097178A (zh) * | 2025-05-09 | 2025-06-06 | 招商南光电梯科技(深圳)有限公司 | 一种电梯钢带异常伸长检测装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08108983A (ja) * | 1994-10-11 | 1996-04-30 | Mitsubishi Denki Bill Techno Service Kk | ブレーキ試験装置 |
| JP2001328778A (ja) * | 2000-05-22 | 2001-11-27 | Mitsubishi Electric Building Techno Service Co Ltd | エレベーターつり合おもりの下降余裕距離測定装置 |
| JP2007119170A (ja) * | 2005-10-27 | 2007-05-17 | Hitachi Building Systems Co Ltd | エレベータ地震管制装置の復旧方法 |
-
2008
- 2008-08-27 JP JP2008218450A patent/JP2010052875A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08108983A (ja) * | 1994-10-11 | 1996-04-30 | Mitsubishi Denki Bill Techno Service Kk | ブレーキ試験装置 |
| JP2001328778A (ja) * | 2000-05-22 | 2001-11-27 | Mitsubishi Electric Building Techno Service Co Ltd | エレベーターつり合おもりの下降余裕距離測定装置 |
| JP2007119170A (ja) * | 2005-10-27 | 2007-05-17 | Hitachi Building Systems Co Ltd | エレベータ地震管制装置の復旧方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010280481A (ja) * | 2009-06-05 | 2010-12-16 | Mitsubishi Electric Corp | エレベーターの制御装置 |
| CN115028039A (zh) * | 2022-06-15 | 2022-09-09 | 永大电梯设备(中国)有限公司 | 一种电梯曳引装置的检测方法 |
| CN120097178A (zh) * | 2025-05-09 | 2025-06-06 | 招商南光电梯科技(深圳)有限公司 | 一种电梯钢带异常伸长检测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPWO2011148411A1 (ja) | 電子安全エレベータ | |
| JP2011042480A (ja) | エレベータ装置 | |
| JP2013040029A (ja) | エレベーター用制御装置 | |
| CN112384462B (zh) | 电梯诊断系统 | |
| CN108689273B (zh) | 电梯超行程测试系统和方法 | |
| CN104229571B (zh) | 电梯 | |
| US9580273B2 (en) | Testing apparatus and safety arrangement | |
| EP3960673B1 (en) | Elevator systems | |
| KR20100097768A (ko) | 엘리베이터 비상제동장치의 제동성능시험 및 분석시스템 | |
| JP2015036340A (ja) | エレベーターの保守運転装置 | |
| EP1880967B1 (en) | Elevator apparatus | |
| JP5538751B2 (ja) | エレベーターの制御装置 | |
| JP2012180132A (ja) | エレベータ装置 | |
| JP2016150823A (ja) | エレベータ点検装置 | |
| JP2010052875A (ja) | エレベーターのブレーキの制動力および保持力の点検方法 | |
| JP2007210704A (ja) | エレベータ緩衝器の試験方法 | |
| JP2007153547A (ja) | エレベーター用主ロープの滑り量検出方法及び滑り量検出装置 | |
| JP2010168185A (ja) | エレベータ装置 | |
| JP5026078B2 (ja) | エレベータ装置 | |
| JP2007039240A (ja) | エレベータのカウンタクリアランス測定装置およびその測定方法 | |
| JP5478343B2 (ja) | 測定治具 | |
| JP5052110B2 (ja) | エレベーターの自動保守運転装置 | |
| KR100898205B1 (ko) | 엘리베이터 장치 | |
| JP2007119170A (ja) | エレベータ地震管制装置の復旧方法 | |
| JP2016055960A (ja) | エレベータの地震自動復旧運転装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100902 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120612 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130205 |