JP2010133765A - センサ装置における異常報知方法および異常報知装置 - Google Patents
センサ装置における異常報知方法および異常報知装置 Download PDFInfo
- Publication number
- JP2010133765A JP2010133765A JP2008308367A JP2008308367A JP2010133765A JP 2010133765 A JP2010133765 A JP 2010133765A JP 2008308367 A JP2008308367 A JP 2008308367A JP 2008308367 A JP2008308367 A JP 2008308367A JP 2010133765 A JP2010133765 A JP 2010133765A
- Authority
- JP
- Japan
- Prior art keywords
- abnormality
- light
- display
- indicator lamp
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Electronic Switches (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
- Geophysics And Detection Of Objects (AREA)
- Burglar Alarm Systems (AREA)
- Switches Operated By Changes In Physical Conditions (AREA)
Abstract
【課題】センサ装置に発生した異常について異常要因の特定を容易にできるようにする。
【解決手段】所定の検出動作を行う投光器1および受光器2と、投受光器1,2の作動状態や投受光器2が有する機能の設定状態を表示させる複数の表示灯3A〜3Hとを備えている多光軸光電センサにおいて、想定される複数の異常要因について異常発生の有無を監視して診断する診断回路と、診断回路により異常ありと診断された異常要因に対応付けたいずれかの表示灯を本来の表示動作と異なる態様で表示動作させる制御回路とを有している。さらに、診断回路により異常ありと診断されたとき、異常の発生を報知する異常表示灯4A,4Bをさらに備えている。
【選択図】図2
【解決手段】所定の検出動作を行う投光器1および受光器2と、投受光器1,2の作動状態や投受光器2が有する機能の設定状態を表示させる複数の表示灯3A〜3Hとを備えている多光軸光電センサにおいて、想定される複数の異常要因について異常発生の有無を監視して診断する診断回路と、診断回路により異常ありと診断された異常要因に対応付けたいずれかの表示灯を本来の表示動作と異なる態様で表示動作させる制御回路とを有している。さらに、診断回路により異常ありと診断されたとき、異常の発生を報知する異常表示灯4A,4Bをさらに備えている。
【選択図】図2
Description
この発明は、所定の検出動作を行う検出部と検出部の作動状態や検出部が有する機能の設定状態を表示させる複数の表示灯とを備えたセンサ装置において、異常が発生したとき、その異常要因を外部に報知するための異常報知方法および異常報知装置に関する。
工場では、プレス機械などの工作機械により作業を行う際に、その作業領域に人体などの物体が進入した状態下で機械が動作しないように、作業領域内の物体の進入を検出するセンサ装置が設置されている。センサ装置が作業領域内に物体が進入したことを検出すると、外部の機械に対して異常を知らせる検出信号を出力するなどして機械を緊急停止させることで、事故の発生を未然に防止している。この種のセンサ装置としては、一般的に多光軸光電センサが多用されている(例えば、特許文献1参照。)。
多光軸光電センサは、複数個の投光素子を有する投光器と投光素子と同数個の受光素子を有する受光器とで構成され、投光器と受光器とは、対をなす投光素子と受光素子とが一対一に向き合うようにして、適当な距離を隔てて配置される。各投光素子と各受光素子とを結ぶ光軸は互いに平行し、投光器と受光器の間に物体の有無を検出するための2次元の物体検出エリアが形成されている。投光器と受光器とは通信線を介して接続され、投光器の各投光素子を順次発光させるとともに、各投光素子に対応する受光器の各受光素子が受光動作を行うことにより、光軸毎の遮光状態を順に検出する。光軸の間隔を密にすることにより、作業者の指のような小さな物体まで高精度で検出することができる。
ところで、多光軸光電センサには一般的に、投光器や受光器に、センサの作動状態やセンサが有する各種機能の設定状態を表示するための表示灯が設けられており、各表示灯の点灯または消灯により、センサの状態を作業者が把握できるようになっている。また、投光器や受光器は、投光器および受光器の内部に異常が発生した場合や投受光器間の通信に異常が発生した場合などにはその異常を検出する異常検出機能を有しており、その異常内容は使用者に報知されるようになっている。
従来の多光軸光電センサでは、投光器や受光器に、上記した表示灯とは別に複数個の異常報知用のエラー表示灯を設け、発生した異常の内容に応じて複数のエラー表示灯による点灯または点滅表示の組み合わせを変化させることによって、異常内容を報知している。また、7セグメントから成る数値表示器を設け、表示する数値によって異常内容を報知するようにしたもの、さらには、LCDなどより成る文字表示器を設け、文字表記によって異常内容を報知するようにしたものもある。
上記した複数個のエラー表示灯の表示パターンにより異常内容を報知する方式では、異常内容を即座に認識するには、使用者は全ての表示パターンを記憶する必要がある。しかし、多種類の異常内容が設定されると、使用者が全表示パターンを記憶するのは容易ではない。マニュアルを見て表示パターンを照合しながら異常内容を特定することも可能であるが、異常内容を特定するのに時間と手間を要するという問題がある。
また、上記したような数値表示器や文字表示器により異常内容を報知する方式では、異常内容の特定を容易に行うことができるが、その取付スペースを確保する必要があるため、投光器や受光器の大型化を招くという問題がある。
また、上記したような数値表示器や文字表示器により異常内容を報知する方式では、異常内容の特定を容易に行うことができるが、その取付スペースを確保する必要があるため、投光器や受光器の大型化を招くという問題がある。
この発明は、上記した問題に着目してなされたものであり、発生した異常についてその異常要因の特定を容易に行うことのできるセンサ装置における異常報知方法および異常報知装置を提供することを目的とする。
この発明による異常報知方法は、所定の検出動作を行う検出部と、検出部の作動状態や検出部が有する機能の設定状態を表示する複数の表示灯とを備えたセンサ装置において、複数の異常要因について異常発生の有無を監視し、異常が発生しかつその異常が前記検出部の作動または機能に影響するとき、その作動状態または機能の設定状態を表示させる表示灯を選択して本来の表示動作と異なる態様で表示動作させることにより異常要因を報知することを特徴とするものである。
上記した構成のセンサ装置に所定の異常要因についての異常が発生すると、その異常が検出部の動作または機能に影響するとき、その作動状態または機能の設定状態を表示する表示灯が本来の表示動作とは異なる態様で表示動作するので、使用者は、各表示灯による表示動作を確認し、どの表示灯が通常時とは異なる表示動作を行っているかを把握するだけで、センサ装置にどのような異常が発生しているのかを容易に特定することができ、異常要因を特定するのに多大な労力や時間を費やすことがない。
この発明の上記した構成において、この発明が適用される「センサ装置」としては、例えば多光軸光電センサが挙げられるが、これに限らず、検出部の作動状態や検出部が有する機能の設定状態を表示させる表示灯が設けられたセンサ装置であれば、物体検知センサを始めとして様々なセンサに適用可能である。
「表示灯」は、例えば発光ダイオード(LED)などによって構成される。また、「本来の表示動作と異なる態様表示動作」とは、少なくとも使用者が見て、異常発生時に行われる表示動作が通常時に行われる表示動作と区別することができる態様の表示動作を意味する。例えば、本来、表示灯を点灯動作させることにより、検出部の作動状態や検出部が有する機能の設定状態を使用者に報知しているのであれば、表示灯を点滅動作などさせることにより、異常の発生を使用者に報知するようにする。
また各表示灯を、少なくとも2種類の色彩によって表示可能に構成し、本来の表示動作と異常が発生したときの表示動作とで異なる色彩(例えば、緑色と赤色)によって表示するように構成することにより、異常の発生を使用者に報知することも可能である。
また各表示灯を、少なくとも2種類の色彩によって表示可能に構成し、本来の表示動作と異常が発生したときの表示動作とで異なる色彩(例えば、緑色と赤色)によって表示するように構成することにより、異常の発生を使用者に報知することも可能である。
この発明による異常報知装置は、所定の検出動作を行う検出部と、検出部の作動状態や検出部が有する機能の設定状態を表示させる複数の表示灯とを備えたセンサ装置において、複数の異常要因について異常発生の有無を監視して診断する診断手段と、診断手段により異常ありと診断された異常要因に対応付けたいずれかの表示灯を本来の表示動作と異なる態様で表示動作させる制御手段とを備えたものである。
上記した構成の異常報知装置によれば、診断手段によりセンサ装置に所定の異常要因について異常が発生したと判断されたとき、制御手段によりその異常要因に対応付けられた所定の表示灯が点滅するなど、本来の表示動作とは異なる態様で表示動作するので、使用者は、各表示灯による表示動作をチェックするだけで、センサ装置に発生した異常の原因を容易に特定することができる。
この発明の好ましい実施態様の異常報知装置は、診断手段により異常ありと診断されたとき、異常の発生を報知する異常表示灯をさらに備えている。上記した「異常表示灯」は、例えば発光ダイオード(LED)などによって構成される。この実施態様によれば、異常表示灯による表示動作によって異常の発生を報知し、各表示灯による表示動作により異常要因を報知するもので、表示灯と異常表示灯との組み合わせにより、異常の発生をより確実に使用者に報知することができる。
この発明のさらに好ましい実施態様においては、前記異常要因のうち特定の異常要因について診断手段により異常ありと診断されたとき、制御手段は、全ての表示灯を本来の表示動作と異なる態様で表示動作させるものである。この実施態様によると、例えば、現場の使用者では復旧不可能な異常要因の異常が発生したときなどに、全ての表示灯を本来の表示動作とは異なる態様で表示動作させることができ、重大でかつ緊急性を要する故障が確実に使用者に報知される。
この発明によれば、センサ装置に異常が発生しかつその異常が検出部の作動または機能に影響を及ぼす際には、その作動状態または機能の設定状態を表示するための表示灯が本来の表示動作と異なる態様で表示動作するので、使用者は、表示灯による表示動作を見るだけで、発生した異常の原因を容易に特定することができる。また、これは、使用者が異常要因の特定のために機械の作業領域内に滞在する時間を大幅に短縮することができ、メンテナンス時の使用者の安全性を向上できる。
さらに、発生した異常の報知を、センサ装置に予め備えられている表示灯を用いて行っているので、別途、異常表示専用の表示灯を設ける必要がなく、センサ装置の大型化やコストアップを招くことがない。
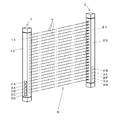
図1は、この発明が適用された多光軸光電センサの外観を示している。図示例の多光軸光電センサは、投光器1と受光器2とが通信線5(図3に示す)により接続されて構成される。投光器1および受光器2には、図示しないコントローラやパーソナルコンピュータなどが接続され、多光軸光電センサに種々の機能(ブランキング機能やミューティング機能など)を設定する処理が実行される。
投光器1および受光器2は、いずれも長手形状の筐体10,20の内部に複数個の投光素子11や複数個の受光素子21が長さ方向へ所定のピッチで一列に配置されたものである。各投光素子11には発光ダイオード(LED)が、各受光素子21にはフォトダイオード(PD)が、それぞれ用いられる。
投光器1の筐体10の投光面(以下、「前面」という。)側には各投光素子11からの光を集めて受光器2に向けて投射するための複数個の投光レンズ(図示せず)が、受光器2の筐体20の受光面(以下、「前面」という。)側には各投光素子11からの光を取り込んで受光素子21に受光させるための複数個の受光レンズ(図示せず)が、それぞれ配備されている。投光器1と受光器2とは、対をなす投光レンズと受光レンズとが一対一に向き合うように設置されることにより、各投光素子11と各受光素子21との光軸Lが合わせられる。投光器1と受光器2との間には、物体の有無を検出するための2次元の物体検出エリアSが形成される。
この物体検出エリアSは、例えば産業用ロボットのロボットアームが作業する領域や、プレス機械において型が往復動する領域に設定される。受光器2は、光軸L毎の遮光状態により、物体検出エリアSへの物体(作業者の身体など)の進入を検出しており、物体の進入を検出すると、機械側の駆動系へ異常検出信号を出力する。機械側の駆動系にはこの異常検出信号を受けることによって開放されるリレー接点が組み込まれている。このリレー接点の働きにより、機械側では機械の駆動を緊急停止させるなどの処理が行われる。
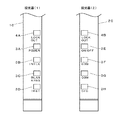
各筐体10,20の後面には、図1および図2に示すように、それぞれ4個の表示灯3A〜3D,3E〜3Hと1個の異常表示灯4A,4Bとが設けられている。各表示灯3A〜3Hは発光ダイオード(LED)を用いて構成されており、多光軸光電センサの作動状態や多光軸光電センサが有する種々の機能の設定状態を、対応する表示灯3A〜3Hが点灯または消灯することにより使用者に報知される。さらに、詳細は後述するが、多光軸光電センサに所定の異常が発生した際には、その異常要因に対応付けたいずれかの表示灯3A〜3Hが上記した本来の表示動作(点灯または消灯動作)とは異なる態様で表示動作することにより、発生した異常の要因が使用者に報知されるようになっている。
この実施例では、表示灯3A〜3Dは投光器1に、表示灯3E〜3Hは受光器2に、それぞれ各筐体10,20の長手方向に沿って一列に配備されている。
この実施例では、表示灯3A〜3Dは投光器1に、表示灯3E〜3Hは受光器2に、それぞれ各筐体10,20の長手方向に沿って一列に配備されている。
異常表示灯4A,4Bは、多光軸光電センサに何らかの異常が発生した場合に点灯することにより、表示灯3A〜3Hとは別に使用者に異常の発生を報知するためのもので、発光ダイオード(LED)を用いて構成されている。
図3は、投光器1および受光器2の構成を示している。投光器1には、各投光素子11、表示灯3A〜3D、および異常表示灯4Aのほか、各投光素子11を個別に駆動するための複数個の駆動回路12、光軸順次選択回路13、制御回路14、受光器2と通信するための通信回路15、各表示灯3A〜3D,4Aを駆動する表示灯駆動回路16、電源回路17、診断回路30などが組み込まれている。受光器2には、各投光素子11と対をなす各受光素子21、表示灯3E〜3H、および異常表示灯4Bのほか、受光素子21毎の増幅器18、アナログスイッチ19、光軸順次選択回路23、制御回路24、投光器1と通信するための通信回路25、増幅回路22、サンプルホールド回路28、A/D変換回路29、各表示灯3E〜3H,4Bを駆動する表示灯駆動回路26、電源回路27、診断回路31、出力回路32などが組み込まれている。
各制御回路14,24は、CPUやメモリを具備するマイクロコンピュータなどにより構成される。各通信回路15,25は、通信線5を介して、投光器1と受光器2との間における信号やデータのやりとりを制御する。各電源回路17,27は、共通の外部電源6(直流電源)から電源の提供を受け、それぞれ投光器1または受光器2内の各部に電源を供給する。投光器1および受光器2の各診断回路30,31は、多光軸光電センサに想定される複数の異常要因について異常発生の有無を監視して診断する。
投光器1の制御回路14は、所定の時間間隔毎に、各投光素子11を発光させる駆動信号(以下、「発光指示信号」という。)を出力する。光軸順次選択回路13は、各投光素子11の駆動回路12を順に制御回路14に接続するためのゲート回路である。この光軸順次選択回路13における切り替え処理により、制御回路14からの発光指示信号が各駆動回路12に順に与えられ、各投光素子11が順に発光する。制御回路14は、発光指示信号を通信回路15より受光器2にも出力する。
受光器2の制御回路24は、通信回路25によって投光器1から発光指示信号を受け取り、この発光指示信号に同期する信号を光軸順次選択回路23およびサンプルホールド回路28に出力する。光軸順次選択回路23は、投光器1の光軸順次選択回路13と同様のゲート回路であって、制御回路24からの同期信号を各アナログスイッチ19に順に与えてオン動作させることにより、発光した投光素子11に対応する受光素子21から受光した光量に応じた電気信号を増幅器18を介して順次取り込む処理を行う。取り込まれた電気信号は、増幅回路22により増幅された後、サンプルホールド回路28においてサンプルホールドされる。さらに、サンプルホールドされた電気信号はA/D変換回路29によりディジタル変換され、制御回路24に入力される。制御回路24は、入力された各電気信号の信号レベルを、あらかじめ設定された所定のしきい値と比較するなどして、各光軸Lが遮光状態であるか否かを判別する。
全ての電気信号の信号レベルがしきい値を上回ると、いずれの光軸も遮光されていない安全な状態であると判別し、駆動許可信号を出力回路32を介して外部の機械に出力する。以下、これを「センサの安全制御出力をONにする」という。
一方、いずれかの電気信号の信号レベルがしきい値を下回っていると、物体検出エリアSに物体があると判別して物体検出信号を生成し、これを外部の機械に出力することで機械の駆動を強制的に止める。以下、これを「センサの安全制御出力をOFFにする」という。
一方、いずれかの電気信号の信号レベルがしきい値を下回っていると、物体検出エリアSに物体があると判別して物体検出信号を生成し、これを外部の機械に出力することで機械の駆動を強制的に止める。以下、これを「センサの安全制御出力をOFFにする」という。
各制御回路14,24は、多光軸光電センサの作動状態や多光軸光電センサに設定された機能に応じて各表示灯3A〜3Hを表示動作させる制御を行う。
投光器1の表示灯3A〜3Dのうち、表示灯3Aは、電源表示灯(図2に「POWER」と表記)であり、多光軸光電センサに電源が投入されると、投光器1の制御回路14は表示灯3Aを点灯させる。
投光器1の表示灯3A〜3Dのうち、表示灯3Aは、電源表示灯(図2に「POWER」と表記)であり、多光軸光電センサに電源が投入されると、投光器1の制御回路14は表示灯3Aを点灯させる。
表示灯3Bは、インターロック表示灯(図2に「INTLK」と表記)であり、多光軸光電センサの作動状態がインターロック状態になると、投光器1の制御回路14は表示灯3Bを点灯させる。なお、インターロックとは、多光軸光電センサのいずれかの光軸が遮光状態となって安全制御出力をOFFにした後、遮光状態が解消されるまでこのOFF状態を保持する機能をいう。
インターロック状態を解除する方法には、遮光状態が解消されると自動的に安全制御出力がONになる「オートリセットモード」と、遮光状態が解消された時点で所定の解除操作が行われると安全制御出力がONになる「マニュアルリセットモード」の2種類の方法があり、図示しないインターロックのモード選択のための入力線を適宜配線することで、使用者はいずれかのモードを選択できる。
インターロック状態を解除する方法には、遮光状態が解消されると自動的に安全制御出力がONになる「オートリセットモード」と、遮光状態が解消された時点で所定の解除操作が行われると安全制御出力がONになる「マニュアルリセットモード」の2種類の方法があり、図示しないインターロックのモード選択のための入力線を適宜配線することで、使用者はいずれかのモードを選択できる。
表示灯3Cは、ブランキング表示灯(図2に「BLANKING」と表記)であり、使用者により多光軸光電センサにブランキング機能が設定されると、投光器1の制御回路14は表示灯3Cを点灯させる。なお、ブランキング機能とは、ある特定の光軸を常時無効化して有効な光軸のみで物体の検出を行うようにするものであり、物体検出エリアS内に障害物が常時とどまり特定の光軸Lを遮光している場合(例えば、物体検出エリアSの一部に機械が存在する場合)に有効な機能である。
表示灯3Dは、外部テスト表示灯(図2に「TEST」と表記)であり、使用者により外部テスト機能が設定されると、投光器1の制御回路14は表示灯3Dを点灯させる。なお、外部テスト機能とは、電源ON時に、外部から信号により各投光素子11の発光を停止させたときに、安全制御出力が正しくOFFになるかどうかなど、多光軸光電センサの動作を確認するための機能である。
次に、受光器2の表示灯3E〜3Hのうち、表示灯3Eは、安全制御出力表示灯(図2に「ON/OFF」と表記)である。この表示灯3Eは、例えば、赤色または緑色に発光する2色発光ダイオード(LED)より成り、受光器2の制御回路24は、センサの安全制御出力がON状態であれば表示灯3Eを緑色に、センサの安全制御出力がOFF状態であれば表示灯3Eを赤色に、それぞれ点灯させる。
表示灯3Fは、外部リレーモニタ表示灯(図2に「EDM」と表記)であり、上記したプレス機械などの外部機械の駆動系を制御するリレーの動作状態が良好であれば、受光器2の制御回路24は表示灯3Fを点灯させる。
表示灯3Gは、通信レベル表示灯(図2に「COM」と表記)であり、投光器1と受光器2との間のデータや信号の通信状態が正常であれば、受光器2の制御回路24は表示灯3Gを点灯させる。
表示灯3Hは、センサ構成表示灯(図2に「CFG」と表記)であり、多光軸光電センサを構成する投光器1と受光器2とが同形式(長さ、出力タイプ、光軸ピッチなど)のものであるとか、投光器1と受光器2との間の通信線5が正しく配線されているとか、多光軸光電センサが正しく構築されていれば、受光器2の制御回路24は表示灯3Hを点灯させる。
この実施例の多光軸光電センサでは、動作中に、投光器1および受光器2の各診断回路30,31が、周期的に、以下の(1)〜(7)に示す複数の異常要因について異常発生の有無を監視している。なお、この実施例では、投光器1および受光器2に診断回路30,31が組み込まれているが、投光器1または受光器2の一方にだけ診断回路を組み込んでもよい。
(1)電源異常
投光器1および受光器2の各診断回路30,31は外部電源6から各電源回路17,27に供給される電源電圧を監視し、電源電圧が定格から外れている異常なものとなっている場合には、異常ありと判別し、電源異常を制御回路14,24へ送信する。受光器2の制御回路24は診断回路31による診断結果に基づく制御信号を投光器1に送信する。電源異常があると、図4に示すように、投光器1の制御回路14は表示灯3Aを点滅させることにより、電源異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
投光器1および受光器2の各診断回路30,31は外部電源6から各電源回路17,27に供給される電源電圧を監視し、電源電圧が定格から外れている異常なものとなっている場合には、異常ありと判別し、電源異常を制御回路14,24へ送信する。受光器2の制御回路24は診断回路31による診断結果に基づく制御信号を投光器1に送信する。電源異常があると、図4に示すように、投光器1の制御回路14は表示灯3Aを点滅させることにより、電源異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
(2)インターロック配線異常
投光器1および受光器2の各診断回路30,31はインターロックのモード選択のための入力線の配線状態を監視しており、上記入力線が断線またはショートしてたり、正しく配線されていない場合には、異常ありと判別し、インターロック配線異常を制御回路14,24に送信する。受光器2の制御回路24は診断回路31による診断結果に基づく制御信号を投光器1に送信する。インターロック配線異常があると、投光器1の制御回路14は表示灯3Bを点滅させることにより、インターロック配線に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
投光器1および受光器2の各診断回路30,31はインターロックのモード選択のための入力線の配線状態を監視しており、上記入力線が断線またはショートしてたり、正しく配線されていない場合には、異常ありと判別し、インターロック配線異常を制御回路14,24に送信する。受光器2の制御回路24は診断回路31による診断結果に基づく制御信号を投光器1に送信する。インターロック配線異常があると、投光器1の制御回路14は表示灯3Bを点滅させることにより、インターロック配線に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
(3)ブランキング異常
診断回路31は、ブランキング機能が設定された場合に、無効化された光軸の各受光素子21について入光状態を監視し、物体検出エリアS内に存在している機械などが位置ずれしていて受光素子21に投光素子11からの光が入光している場合には、異常ありと判別し、ブランキング機能の設定異常を制御回路24に送信する。受光器2の制御回路24は診断回路31による診断結果に基づく制御信号を投光器1に送信する。投光器1の制御回路14は表示灯3Cを点滅させることにより、ブランキング機能の設定に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
診断回路31は、ブランキング機能が設定された場合に、無効化された光軸の各受光素子21について入光状態を監視し、物体検出エリアS内に存在している機械などが位置ずれしていて受光素子21に投光素子11からの光が入光している場合には、異常ありと判別し、ブランキング機能の設定異常を制御回路24に送信する。受光器2の制御回路24は診断回路31による診断結果に基づく制御信号を投光器1に送信する。投光器1の制御回路14は表示灯3Cを点滅させることにより、ブランキング機能の設定に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
(4)安全制御出力異常
診断回路31は、出力回路32から外部の機械へ出力される制御出力信号を監視しており、制御出力信号を制御回路24にフィードバックして確認することにより正常な信号と異なる信号を出力回路32が出力しているかどうかを診断する。もし、異常ありと判断されると、出力回路32の異常が診断回路31より制御回路24へ送信される。制御回路24は診断回路31による診断結果に基づき表示灯3Eを点滅させることにより、出力回路32に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させる。
診断回路31は、出力回路32から外部の機械へ出力される制御出力信号を監視しており、制御出力信号を制御回路24にフィードバックして確認することにより正常な信号と異なる信号を出力回路32が出力しているかどうかを診断する。もし、異常ありと判断されると、出力回路32の異常が診断回路31より制御回路24へ送信される。制御回路24は診断回路31による診断結果に基づき表示灯3Eを点滅させることにより、出力回路32に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させる。
(5)外部リレーモニタ異常
診断回路31は、多光軸光電センサと外部の機械の駆動系との間に介在させるリレーの動作状態を監視する。もし、リレーに動作不良が生じている場合には、異常ありと判別し、外部リレーの異常を制御回路24に送信する。制御回路24は診断回路31による診断結果に基づき表示灯3Fを点滅させることにより、外部の機械のリレーに異常がある旨を報知する。このリレーの動作状態は、例えば、受光器2に接続される図示しない入力線を通じてリレーからの入力信号をチェックすることによって検出することができる。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
診断回路31は、多光軸光電センサと外部の機械の駆動系との間に介在させるリレーの動作状態を監視する。もし、リレーに動作不良が生じている場合には、異常ありと判別し、外部リレーの異常を制御回路24に送信する。制御回路24は診断回路31による診断結果に基づき表示灯3Fを点滅させることにより、外部の機械のリレーに異常がある旨を報知する。このリレーの動作状態は、例えば、受光器2に接続される図示しない入力線を通じてリレーからの入力信号をチェックすることによって検出することができる。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
(6)通信異常
投光器1および受光器2の各診断回路30,31は、投光器1と受光器2との間の信号やデータの通信状態を監視する。もし、ノイズなどによる通信異常により、信号が伝達されなかったり、信号の内容に異常がある場合には、異常ありと判別し、通信異常を制御回路14,24へ送信する。投光器1の制御回路14は診断回路30による診断結果に基づく制御信号を受光器2に送信する。通信異常があると、受光器2の制御回路24は表示灯3Gを点滅させることにより、通信異常が生じている旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
投光器1および受光器2の各診断回路30,31は、投光器1と受光器2との間の信号やデータの通信状態を監視する。もし、ノイズなどによる通信異常により、信号が伝達されなかったり、信号の内容に異常がある場合には、異常ありと判別し、通信異常を制御回路14,24へ送信する。投光器1の制御回路14は診断回路30による診断結果に基づく制御信号を受光器2に送信する。通信異常があると、受光器2の制御回路24は表示灯3Gを点滅させることにより、通信異常が生じている旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
(7)センサ構成異常
投光器1および受光器2の各診断回路30,31は、例えば、通信によりそれぞれ投光器1または受光器2の型式を取り込んで互いの形式をチェックしたり、投光器1と受光器2との間の通信線5の配線状態を監視する。もし、形式の不一致や通信線5の配線ミスや断線などにより、多光軸光電センサが正しく構築されていない場合には、異常ありと判別し、センサ構成の異常を制御回路14,24に送信する。投光器1の制御回路14は診断回路30による診断結果に基づく制御信号を受光器2に送信する。センサ構成の異常があると、受光器2の制御回路24は表示灯3Hを点滅させることにより、センサの構築に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
投光器1および受光器2の各診断回路30,31は、例えば、通信によりそれぞれ投光器1または受光器2の型式を取り込んで互いの形式をチェックしたり、投光器1と受光器2との間の通信線5の配線状態を監視する。もし、形式の不一致や通信線5の配線ミスや断線などにより、多光軸光電センサが正しく構築されていない場合には、異常ありと判別し、センサ構成の異常を制御回路14,24に送信する。投光器1の制御回路14は診断回路30による診断結果に基づく制御信号を受光器2に送信する。センサ構成の異常があると、受光器2の制御回路24は表示灯3Hを点滅させることにより、センサの構築に異常がある旨を報知する。その際、各制御回路14,24は異常表示灯4A,4Bをそれぞれ点灯させるとともに、受光器2の制御回路24は安全制御出力表示灯3Eを赤色に点灯をさせる。
以上のように、投光器1および受光器2の各診断回路30,31は、上記した多光軸光電センサの作動や機能に支障をきたす種々の異常要因について異常が発生していないか否かを判別し、診断回路30,31により異常が発生していると診断されると、各制御回路14,24は、その作動状態または機能の設定状態を表示する表示灯3A〜3Hを選択して本来の表示動作とは異なる態様で表示動作させる。その際、発生した異常の種類にかかわらず異常表示灯4A,4Bも点灯させる。これにより、使用者は、多光軸光電センサに何らかの異常が発生していることに加えて、どのような異常が発生しているのかを、表示灯の表示を見るだけで簡単に確認することができる。
診断回路30,31により、複数の異常要因についてその異常の発生が検出された場合には、図5に示すように、各制御回路14,24は該当する異常要因に対応付けられた表示灯をそれぞれ点滅させる。図示例は、電源異常と通信異常が併発した場合の表示状態を示している。
この実施例の診断回路30,31は、上記した異常要因に加えて、例えば駆動回路12や光軸順次選択回路13,23などの内部回路の故障や内部CPUやメモリの故障など、現場の使用者では復旧するのに多大な時間や手間がかかる異常要因についても、その異常発生の有無を監視している。その種の異常を検出した場合には、図6に示すように、投光器1および受光器2の各制御回路14,24は全ての表示灯3A〜3Hを点滅させるとともに、異常表示灯4A,4Bを点灯させることで、使用者にその旨を報知する。
多光軸光電センサに上記した異常が発生した場合にも、安全制御出力をOFFにする、すなわち、物体検出信号を出力回路32を介して外部の機械に出力することにより機械を緊急停止させる。
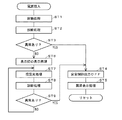
図7は、この発明の多光軸光電センサの動作の流れを概略的に示したものである。
まず、多光軸光電センサに電源が投入されると、起動処理が実行され(ST1)、次のST2において、多光軸光電センサに想定される所定の異常要因について異常発生の有無を投光器1および受光器2の各制御回路14,24や各診断回路30,31により診断する診断処理が実行される。
まず、多光軸光電センサに電源が投入されると、起動処理が実行され(ST1)、次のST2において、多光軸光電センサに想定される所定の異常要因について異常発生の有無を投光器1および受光器2の各制御回路14,24や各診断回路30,31により診断する診断処理が実行される。
診断処理の結果、異常が認められると、ST3の判定が「YES」であり、多光軸光電センサはロックアウト状態となり、安全制御出力をOFFにしてその状態を保持する(ST4)。同時に、各異常表示灯4A,4Bを点灯させるとともに、発生した異常の異常要因に対応付けた表示灯を点滅させ、これにより異常の発生と異常要因を使用者に知らせる(ST5)。その後、異常が解消されて電源が再投入されるなどのリセット処理がなされるまでその状態が維持される。
診断処理の結果、異常が認められなかった場合は、ST3の判定が「NO」であり、多光軸光電センサは正常な状態であるから、ST6へ進み、表示灯3A,3F〜3Hを点灯させ、表示灯3Eを緑色に点灯させるなどして、各表示灯の表示処理が実行される。次に、ST7へ進んで投受光処理が実行され、診断処理が周期的に実行される(ST8)。作動中の診断処理において異常が認められなければ、ST9の判定は「NO」であり、ST7に戻って投受光処理が継続して実行される。作動中の診断処理において異常が認められると、ST9の判定は「YES」となってST4へ進み、多光軸光電センサはロックアウト状態となり、安全制御出力をOFFにしてその状態を保持する。これと同時に、各異常表示灯4A,4Bを点灯させるとともに、発生した異常の異常要因に対応付けた表示灯を点滅させ、これにより異常の発生と異常要因を使用者に知らせる(ST5)。
なお、上記した実施例では、異常報知時に各表示灯3A〜3Hを点滅動作させているが、これに限らず、各表示灯3A〜3Hをそれぞれ通常時とは異なる色彩で点灯させてもよい。
1 投光器
2 受光器
3A〜3H 表示灯
4A,4B 異常表示灯
5 通信線
11 投光素子
13,23 光軸順次選択回路
14,24 制御回路
15,25 通信回路
16,26 表示灯駆動回路
21 受光素子
30,31 診断回路
32 出力回路
2 受光器
3A〜3H 表示灯
4A,4B 異常表示灯
5 通信線
11 投光素子
13,23 光軸順次選択回路
14,24 制御回路
15,25 通信回路
16,26 表示灯駆動回路
21 受光素子
30,31 診断回路
32 出力回路
Claims (4)
- 所定の検出動作を行う検出部と、検出部の作動状態や検出部が有する機能の設定状態を表示する複数の表示灯とを備えたセンサ装置において、
複数の異常要因について異常発生の有無を監視し、異常が発生しかつその異常が前記検出部の作動または機能に影響するとき、その作動状態または機能の設定状態を表示させる表示灯を選択して本来の表示動作と異なる態様で表示動作させることにより異常要因を報知することを特徴とするセンサ装置における異常報知方法。 - 所定の検出動作を行う検出部と、検出部の作動状態や検出部が有する機能の設定状態を表示させる複数の表示灯とを備えたセンサ装置において、
複数の異常要因について異常発生の有無を監視して診断する診断手段と、診断手段により異常ありと診断された異常要因に対応付けたいずれかの表示灯を本来の表示動作と異なる態様で表示動作させる制御手段とを備えて成るセンサ装置における異常報知装置。 - 請求項2に記載されたセンサ装置における異常報知装置であって、診断手段により異常ありと診断されたとき、異常の発生を報知する異常表示灯をさらに備えているセンサ装置における異常報知装置。
- 請求項2または3に記載されたセンサ装置における異常報知装置であって、前記異常要因のうち特定の異常要因について診断手段により異常ありと診断されたとき、制御手段は、全ての表示灯を本来の表示動作と異なる態様で表示動作させるセンサ装置における異常報知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008308367A JP2010133765A (ja) | 2008-12-03 | 2008-12-03 | センサ装置における異常報知方法および異常報知装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008308367A JP2010133765A (ja) | 2008-12-03 | 2008-12-03 | センサ装置における異常報知方法および異常報知装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010133765A true JP2010133765A (ja) | 2010-06-17 |
Family
ID=42345206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008308367A Pending JP2010133765A (ja) | 2008-12-03 | 2008-12-03 | センサ装置における異常報知方法および異常報知装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010133765A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012081265A1 (ja) * | 2010-12-17 | 2012-06-21 | オムロン株式会社 | 多光軸光電センサ |
| CN103226885A (zh) * | 2012-01-30 | 2013-07-31 | 精工爱普生株式会社 | 侵入检测装置、机械手以及侵入检测方法 |
| JP2013218970A (ja) * | 2012-04-11 | 2013-10-24 | Keyence Corp | 多光軸光電センサ |
| KR102081226B1 (ko) * | 2018-10-30 | 2020-02-25 | 주식회사 오토닉스 | 다광축 센서 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004135790A (ja) * | 2002-10-16 | 2004-05-13 | Olympus Corp | 外科用手術装置及びそれを用いた異常報知システム |
| JP2004276348A (ja) * | 2003-03-14 | 2004-10-07 | Ricoh Co Ltd | 画像形成装置 |
| JP2006098008A (ja) * | 2004-09-30 | 2006-04-13 | Tokyo Gas Co Ltd | 床暖房システム試運転装置 |
-
2008
- 2008-12-03 JP JP2008308367A patent/JP2010133765A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004135790A (ja) * | 2002-10-16 | 2004-05-13 | Olympus Corp | 外科用手術装置及びそれを用いた異常報知システム |
| JP2004276348A (ja) * | 2003-03-14 | 2004-10-07 | Ricoh Co Ltd | 画像形成装置 |
| JP2006098008A (ja) * | 2004-09-30 | 2006-04-13 | Tokyo Gas Co Ltd | 床暖房システム試運転装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012081265A1 (ja) * | 2010-12-17 | 2012-06-21 | オムロン株式会社 | 多光軸光電センサ |
| JP2012134575A (ja) * | 2010-12-17 | 2012-07-12 | Omron Corp | 多光軸光電センサ |
| EP2654061B1 (en) | 2010-12-17 | 2018-08-29 | Omron Corporation | Multi-axis photoelectric sensor |
| CN103282992A (zh) * | 2010-12-17 | 2013-09-04 | 欧姆龙株式会社 | 多光轴光电传感器 |
| CN103282992B (zh) * | 2010-12-17 | 2015-11-25 | 欧姆龙株式会社 | 多光轴光电传感器 |
| US9171438B2 (en) | 2010-12-17 | 2015-10-27 | Omron Corporation | Multi-axis photoelectric sensor |
| US9031694B2 (en) | 2012-01-30 | 2015-05-12 | Seiko Epson Corporation | Entry detection device, robot, and entry detection method |
| US9360860B2 (en) | 2012-01-30 | 2016-06-07 | Seiko Epson Corporation | Entry detection device, robot, and entry detection method |
| CN103226885A (zh) * | 2012-01-30 | 2013-07-31 | 精工爱普生株式会社 | 侵入检测装置、机械手以及侵入检测方法 |
| CN103376475A (zh) * | 2012-04-11 | 2013-10-30 | 株式会社其恩斯 | 多光轴光电传感器 |
| JP2013218970A (ja) * | 2012-04-11 | 2013-10-24 | Keyence Corp | 多光軸光電センサ |
| CN103376475B (zh) * | 2012-04-11 | 2019-01-25 | 株式会社其恩斯 | 多光轴光电传感器 |
| KR102081226B1 (ko) * | 2018-10-30 | 2020-02-25 | 주식회사 오토닉스 | 다광축 센서 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008181798A (ja) | 多光軸光電センサ | |
| CN105371094B (zh) | 多光轴光电传感器 | |
| JP5643526B2 (ja) | 機械の操作装置 | |
| US20050063114A1 (en) | Safety relay system | |
| KR101828077B1 (ko) | 오작동 방지 기능을 구비한 화재 감지 시스템 | |
| US7555680B2 (en) | Distributed control apparatus | |
| JP2010133765A (ja) | センサ装置における異常報知方法および異常報知装置 | |
| JP2019111998A (ja) | 発光機の断線検出装置 | |
| KR20130102278A (ko) | 설비 장치 모니터링 시스템 및 방법 | |
| US6204575B1 (en) | Method of verifying an extension area sensor controlled, master controller of area sensors, and cover to be used when no slave controller is added | |
| CN109074032B (zh) | 用于电控设备的控制系统 | |
| JP5184027B2 (ja) | 多光軸光電センサ、及び多光軸光電センサシステム | |
| US20240282185A1 (en) | Operating unit and a method for operating a plant with an operating unit | |
| JP5699495B2 (ja) | 交通信号制御機 | |
| JP5911364B2 (ja) | 多光軸光電センサ | |
| CN101265594B (zh) | 铝电解槽控机手动操作开关检测系统 | |
| EP0928126A2 (en) | Method and arrangement for observing the operational status of an electrical device | |
| CN219533817U (zh) | 视觉识别装置 | |
| KR102411196B1 (ko) | 자가진단이 가능한 구급차시스템 | |
| JP2006302614A (ja) | 安全仕様の制御装置 | |
| JP2006112982A (ja) | 多光軸光電センサ | |
| JP2005318440A (ja) | 信号入力装置並びに、安全センサ | |
| CN104375500B (zh) | 汽车悬架控制臂自动装配线的状态监测与故障诊断系统 | |
| JP2010238189A (ja) | 設備信号点検用アダプタ、設備信号点検方法 | |
| KR100275075B1 (ko) | 자동화 설비의 센서 이상 표시방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130305 |