JP2010142562A - 移乗支援装置、移乗支援装置の制御方法 - Google Patents
移乗支援装置、移乗支援装置の制御方法 Download PDFInfo
- Publication number
- JP2010142562A JP2010142562A JP2008325715A JP2008325715A JP2010142562A JP 2010142562 A JP2010142562 A JP 2010142562A JP 2008325715 A JP2008325715 A JP 2008325715A JP 2008325715 A JP2008325715 A JP 2008325715A JP 2010142562 A JP2010142562 A JP 2010142562A
- Authority
- JP
- Japan
- Prior art keywords
- personal data
- cared person
- transfer support
- holder
- transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Invalid Beds And Related Equipment (AREA)
Abstract
【解決手段】移動可能な台車部1と、水平回転および傾動可能であって基端が台車部に取り付けられたアーム部2と、アーム部2に取り付けられた身体保持具3と、アーム部2を駆動させる駆動手段と、駆動手段を駆動制御する制御部と、を備える。入力された被介護者ごとの個人データに基づいて移乗支援時に被介護者の安全を確保できる軌道を求め、台車部、アーム部および身体保持具の軌道を安全軌道内に収まるように制御する。
【選択図】図7
Description
このような場合に総ての被介護者に対して同じような軌道で受板を動かしていては、被介護者に対して強いストレスや苦痛を与え、最悪の場合には命の危険に関わる事故が発生する恐れがある。
はじめ、受板を被介護者が抱えられる位置と角度に移動させ、これに被介護者がつかまる。そして、被介護者を持ち上げるようにアームを上に旋回させる。すると、被介護者の体は持ち上がる。
ここで、受板に体重の大部分がかかることになり、移乗動作の途中で受板と接触している胸部に過大なストレスがかかる。
胸部に疾患などがなければこれでも良いが、胸に疾患があったり、心臓ペースメーカをインプラントしている被介護者の胸を圧迫することは大変危険である。
しかし、乗り移りが必要な場面として便座への移動が一日に数回あるところ、すみやかな移乗操作が求められる場面で受板やアームの軌道を微調整しているほどの余裕がない場合が多い。慌てて操作する場面が多くなると、患部に衝撃を与えてしまう事故が起こってしまうことはどうしても避けがたい。
あるいは、安全軌道制御部が求めた安全軌道に沿って自動的にアーム部および保持具を駆動させてもよい。
このような構成において、安全軌道は、疾患部位にかかる外力をできる限り減じるように求められる。
たとえば、患部を圧迫しないことや、曲げ伸ばしで生じる痛みを減じるように安全軌道が求められる。
このような構成において、被介護者の体型データに基づいて、身体保持具が被介護者の体に衝突するのを回避したり、身体保持具が被介護者の体に沿う角度になるように安全軌道が求められる。
このような構成において、過去に痛みが生じた場合には痛みを減じるように安全軌道が設定される。また、動作速度や動作音に恐怖感が生じた場合には、動作速度などにリミットが設定される。
このような構成によれば、被介護者自身、介護者または医師などが入力装置を用いて被介護者の個人データを移乗支援装置に入力することができる。
このような構成において、介護支援を行う前にICタグ、バーコード、携帯電話機等の情報を移乗支援装置の入力装置が読みとり、個人データに応じた安全制御を実行する。
このような構成によれば、介護支援の度に被介護者の個人データを逐一入力しなくてもよいため、迅速な介護支援を行うことができる。
このような構成によれば、上記発明と同様の作用効果を奏することができる。
本発明に係る第1実施形態について説明する。
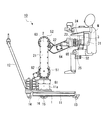
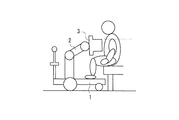
図1は、本発明の第1実施形態に係る移乗支援装置の側面図である。
移乗支援装置10は、台車部1と、台車部1に連結されたロボットアーム部2と、ロボットアーム部2に取付けられた保持具3と、を備えている。
左右一対の駆動車輪15には、各駆動車輪15を駆動する左右一対の第6モータ16が夫々連結されている。
第1アーム部21は、ヨー軸及びピッチ軸回りの回転が可能となるように、第1関節部51を介して台車本体11の土台部11aに連結されている。
第2アーム部22は、ピッチ軸回りの回転が可能となるように、第2関節部52を介して第1アーム部21に連結されている。
第3アーム部23の一端は、ピッチ軸回りで回転が可能となるように、第3関節部を介して第2アーム部22に連結されている。(図1中では、第3関節部は第3アーム部の背面にあって見えないため不図示)
第3アーム部23の他端には、ロール軸回りの回転が可能となるように、第4関節部を介して保持具3を取付けるための取付部24が連結されている。(図1中では、第4関節部は第3アーム部に内蔵されていて見えないため不図示)
取付部24は、保持具3の取付け/取外しが可能な周知の取付構造(例えば、ボルト及びナットを用いた締結構造、嵌合構造)を有する。
ピッチ軸とは、第1アーム部21、第2アーム部22および第3アーム部23を上下方向へ回動させる際の回転軸である。
ロール軸とは、第3アーム部23に対して取付部24及び保持具3を回転させる際の回転軸であり、第3アーム部23の軸線に相当する。
第1関節部51には、第1アーム部21をピッチ軸回りに回転駆動する第2モータ(駆動手段)62が設けられている。
第2関節部52には、第2アーム部22をピッチ軸回りに回転駆動する第3モータ(駆動手段)63が設けられている。
第3関節部には、第3アーム部23をピッチ軸回りに回転駆動する第4モータ(駆動手段)64が設けられている。
第4関節部には、取付部24及び保持具3をロール軸回りに回転駆動する第5モータ(駆動手段)65が設けられている。
回転センサ71、72、73、74、75は、制御部17に接続されており、検出した回転駆動量を制御部17に対して出力する。
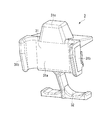
保持具3は、ロボットアーム部2の取付部24に取付けられる。
保持具3は、被介護者の胴体を抱えるように保持する胴体サポート部31と、被介護者の下肢部を支持する下肢サポート部32と、を有している。
なお、胴体サポート部31及び下肢サポート部32は、一体で構成されているが、別体で夫々構成されていてもよい。
台車部1には、第1から第6モータ61、62、63、64、65、16の回転駆動を制御する制御部17が設けられている。
制御部17は、制御処理、演算処理等と行うCPU(Central Processing Unit)17aと、CPU 17aによって実行される制御プログラム、演算プログラム等が記憶されたROM(Read Only Memory)17bと、処理データ等を一時的に記憶するRAM(Random Access Memory)17cと、を有するマイクロコンピュータを中心に構成されており、さらに、個人データ記憶部130と、安全軌道制御部120と、を備えている。
力センサ25cは、操作部25に対して加えられた操作力の大きさ、方向、モーメント等に応じた操作を検出し、操作信号を制御部17に対して出力する。
入力装置110としては、キーボード、マウスおよび表示パネルを備えた入力支援システムが例として挙げられる。この表示パネルはタッチパネルであってもよい。また、キーボードやマウスの他、デジタルペンを入力装置110として使用してもよい。
図4は、入力画面の例である。
入力するデータとしては、個人氏名および性別の下に個人データとして、(A)体型、(B)疾患等特記事項および(C)過去運用データがある。
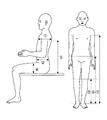
体型(A)に関する項目としては、体重と詳細サイズ項目とがある。
詳細サイズ項目の下位項目としては、(1)乳頭位胸部厚径、(2)腹部厚径、(3)座位腋窩高、(4)座位大腿厚、(5)膝高、(6)転子高、(7)前腋窩高がある。
各項目の該当箇所は図5に示す通りである。
入力方法としては、各項目をクリックなどして選択することにより入力を受け付けるようになっていてもよく、図5のような体を示した画像上をタッチペンなどで選択して各部位のサイズを入力するようになっていてもよい。
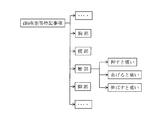
図6は、疾患等特記事項の下位項目の例を示す図である。
疾患等特記事項の下位項目として胸部、腹部、腰部、脚部などの体の部位があり、さらに、各部位ごとに症状を入力するようになっている。
たとえば、腰部であれば、押さえると痛い、曲げると痛い、伸ばすと痛い、などの詳細な症状が入力できるようになっている。
これらの入力方法は、予め設定された項目から選んでチェックするようになっていてもよく、図5のような体を示した画像上をタッチペンなどで選択することにより疾患部位と症状を入力できるようになっていてもよい。
安全軌道制御部120による制御動作は具体例を用いて後述する。
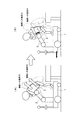
図7に動作例1を示す。
動作例1は、被介護者の胸部および腹部の少なくともいずれかに疾患があり、この疾患部位への圧迫を避ける必要がある場合の動作例である。
まず、図7(A)は、個人データに関係なく移乗支援動作を行う場合である。
図7(A)では、はじめ、被介護者が保持具3につかまれるようにアーム部2の先端を下げる。被介護者は胸の前に来た保持具3につかまる。そして、保持具3に被介護者を載せる様にアーム部2を上側に向けて回動させる。これによって被介護者の体を持ち上げることができるが、被介護者の胸部および腹部に全体重がかかってくるため、胸部および腹部に大きな圧力がかかる。
個人データの入力が入力装置110によって行われ、個人データ記憶部130にこの被介護者の個人データが記憶されている。
この個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例1では胸部あるいは腹部に「押すと痛い」や「押すと危険」などの情報が入力されているものとする。
このような個人データに基づいて安全軌道制御部120はこの被介護者にとっての安全軌道を求め、アーム部2および保持具3の駆動制御を実行する。
ここでは、保持具3の角度が大きくなり過ぎないように、保持具3が鉛直方向に対してなす角にリミットを設定する。これにより、保持具3が胸部や腹部を圧迫しないようにする。
具体的には、回転センサ75による回転角の検出値を見ながら第3アーム部23をピッチ軸回りに回転駆動する第4モータ(駆動手段)64を駆動させ、保持具3の角度が安全軌道内に収まるようにする。
なお、保持具3の角度が大きくならないように回動させるだけでは、保持具3が胸部を押す方向へ回転することになるため、移乗支援装置10の台車1を前進させる。
これにより、保持具3が被介護者の胸部を押さないようにする。
これによって移乗動作の過程で被介護者の疾患部(胸部または腹部)に大きな圧力がかからないようになる。
移乗支援装置10が安全軌道制御部120の安全制御によって自動的に被介護者への圧迫を避けるように動作するので、介護者などの操作者が特別な微調整をしなくても被介護者の乗り移り動作を円滑に支援することができる。そして、微調整などは必要ないことから、トイレなどに急ぐ場合であっても迅速かつ安全に移乗動作を行うことができる。
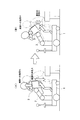
図8に動作例2を示す。
動作例2は、被介護者の腕部および腰部に疾患があり、この疾患部位へのストレスを避ける必要がある場合の動作例である。
まず、図8(A)は、個人データに関係なく移乗支援動作を行う場合である。
図8(A)では、はじめ、被介護者が保持具3につかまれるようにアーム部2の先端を下げる。被介護者は胸の前に来た保持具3につかまる。そして、被介護者を持ち上げるようにアーム部2を回動させるとともに、保持具3の鉛直姿勢を維持して被介護者が保持具に掴まれるようにする。
これによって被介護者の体を持ち上げることができるが、移乗動作の過程において、被介護者は自重の大部分を腕で支えなければならず、腕に大きな圧力がかかる。
また、上体だけを持ち上げることになるため、腰部が伸びる姿勢になってしまう。被介護者が腰部を伸ばすと痛いという疾患を持っていた場合には、被介護者に苦痛を与えることになる。
個人データの入力が入力装置110によって行われ、個人データ記憶部130にこの被介護者の個人データが記憶されている。
この個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例2では、腕部に「押すと痛い」という情報が入力され、腰部に「伸ばすと痛い」という情報が入力されているものとする。
このような個人データに基づいて安全軌道制御部120はこの被介護者にとっての安全軌道を求め、アーム部2および保持具3の駆動制御を実行する。
ここでは、腕部に荷重がかかったり、腰部が伸びたりしないように保持具が鉛直線に対して一定以上の角度を保つようにする。
具体的には、回転センサ75による回転角の検出値を見ながら第3アーム部23をピッチ軸回りに回転駆動する第4モータ(駆動手段)64を駆動させ、保持具の角度が安全軌道内に収まるようにする。すると、被介護者の体は保持具3にのっかるようになり、腕部に大きな力はかからず、また、腰部は曲がった状態を保つことができる。
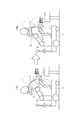
図9に動作例3を示す。
動作例3は、被介護者の腰部に疾患があり、この疾患部位へのストレスを避ける必要がある場合の動作例である。
まず、図9(A)は、個人データに関係なく移乗支援動作を行う場合である。
図9(A)では、はじめ、被介護者が保持具3につかまれるようにアーム部2の先端を下げる。
被介護者は胸の前に来た保持具3につかまる。そして、保持具3に被介護者を載せる様にアーム部2を上側に向けて回動させる。これによって被介護者の体を保持具3に載せて持ち上げることができるが、被介護者の腰部が大きく曲がってしまう。被介護者が腰部を曲げると痛いという疾患を持っていた場合、被介護者に苦痛を与えることになる。
個人データの入力が入力装置110によって行われ、個人データ記憶部130にこの被介護者の個人データが記憶されている。
この個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例2では、腰部に「曲げると痛い」という情報が入力されているものとする。
このような個人データに基づいて安全軌道制御部120はこの被介護者にとっての安全軌道を求め、アーム部2および保持具3の駆動制御を実行する。
ここでは、腰部が曲がりすぎないように保持具3が鉛直線に対して所定値以内の角度を保つようにする。
具体的には、回転センサ75による回転角の検出値を見ながら第3アーム部23をピッチ軸回りに回転駆動する第4モータ(駆動手段)64を駆動させ、保持具3の角度が安全軌道内に収まるようにする。すると、被介護者の腰部が曲がらないで伸びた状態を保てるため、被介護者は痛みを感じることなく乗り移り動作を円滑に行うことができる。
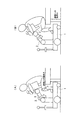
図10に動作例4を示す。
動作例4は、被介護者の脚部に疾患があり、この疾患部位へのストレスを避ける必要がある場合の動作例である。
まず、図10(A)は、個人データに関係なく移乗支援動作を行う場合である。
図10(A)では、はじめ、被介護者が保持具3につかまれるようにアーム部2の先端を下げる。
被介護者は胸の前に来た保持具3につかまる。そして、保持具3に被介護者を載せる様にアーム部2を上側に向けて回動させる。これによって被介護者の体を保持具3に載せて持ち上げることができる。しかしながら、保持具3を被介護者の胸の前に移動させるときに、操作ミスなどによって保持具3を下げ過ぎると保持具が被介護者の脚部に接触したり、さらには脚部を強く押圧する危険がある。
個人データの入力が入力装置110によって行われ、個人データ記憶部130にこの被介護者の個人データが記憶されている。
この個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例4では、脚部に「押すと痛い」という情報が入力されているものとする。
このような個人データに基づいて安全軌道制御部120はこの被介護者にとっての安全軌道を求め、アーム部2および保持具3の駆動制御を実行する。
ここでは、保持具が被介護者の前で下がり過ぎて脚部を圧迫しないように被介護者の前では下がりすぎないようにする。
このとき、保持具3が下がりすぎないように、アーム部2および保持具3の下限位置を制限する。
具体的には、回転センサ74による回転角の検出値を見ながら第2アーム部22をピッチ軸回りに回転駆動する第3モータ(駆動手段)63を駆動させ、保持具3の下端が安全軌道内に収まるようにする。
これによって被介護者を保持具3に載せるときに誤って保持具3で被介護者の脚部を圧迫することを防ぐことができる。そして、被介護者を持ち上げるようにアーム部2を起こして被介護者の乗り移り動作をサポートする。
ただし、保持具3に乗り移ってから次の移乗先に降りるときには降りやすいように保持具3が十分に下がることが好ましい場合もある。
そのため、安全軌道としての保持具3の下限位置は、保持具3に乗り移るときに保持具3を被介護者の胸の前に移動させる時だけに下限が作動するように設定することが好ましい。
このように、一連の移乗動作の過程のなかで安全が図られつつも円滑な乗り移り動作ができるようにする。
図11に動作例5を示す。
動作例5は、被介護者の乳頭位胸部厚径と腹部厚径とが著しく違う場合の動作例である。
まず、図11(A)は、個人データに関係なく移乗支援動作を行う場合である。
図11(A)では、はじめ、被介護者が保持具につかまれるようにアームの先端を下げる。
このとき、胸部の位置に合うように保持具を被介護者の胸の前に持ってくると、保持具が被介護者の腹部に衝突してしまうため危険である。
また、腹部の位置に合うように保持具を被介護者の前に持ってくると、保持具と胸部との間に隙間が開き過ぎ、被介護者が保持具につかまりにくくやはり危険である。
個人データの入力が入力装置110によって行われ、個人データ記憶部130にこの被介護者の個人データが記憶されている。
この個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例5では、体型項目(A)として乳頭位胸部厚径(1)と腹部厚径(2)とを含む詳細サイズが入力されている。
このような個人データに基づいて安全軌道制御部120はこの被介護者にとっての安全軌道を求め、アーム部2および保持具3の駆動制御を実行する。
ここでは、保持具3が被介護者の胸の前において、胸部に接近しつつ腹部に接触しないようにする。
具体的には、図11(B)に示すように、保持具3の角度を鉛直から傾斜させて胸部から腹部に沿うようにする。
これにより、被介護者は腹部に圧迫感を感じることなく、安全に保持具に掴まることができる。
図12に動作例6を示す。
動作例6は、被介護者の大腿部が平均よりも高い位置にある場合の動作例である。
まず、図12(A)は、個人データに関係なく移乗支援動作を行う場合である。
図10(A)では、はじめ、被介護者が保持具につかまれるようにアームの先端を下げる。
被介護者は胸の前に来た保持具につかまる。このとき、通常行うように保持具を胸の前に移動させてくると、保持具が大腿部に衝突してしまう。
個人データの入力が入力装置110によって行われ、個人データ記憶部130にこの被介護者の個人データが記憶されている。
この個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例6では、体型項目(A)として座位大腿部厚(4)を含む詳細サイズが入力されている。
このような個人データに基づいて安全軌道制御部120はこの被介護者にとっての安全軌道を求め、アーム部2および保持具3の駆動制御を実行する。
ここでは、座位大腿部厚に基づいて、保持具が大腿部に接触しないように保持具が被介護者の胸の前で下がりすぎないようにする。これにより、保持具が被介護者の大腿部を衝突して足を傷つけてしまわないようにする。
図13に動作例7を示す。
動作例7は、被介護者の座位腋窩高に保持具3の高さを合わせて、安全に被介護者が保持具につかまれるようにする場合の動作例である。
被介護者が保持具3につかまれるようにアームの先端を下げたとき、保持具3の高さが被介護者の体に合ってないと、もともと移乗支援が必要な被介護者にとっては保持具3に移ること自体が難しく、事故が起きる恐れもある。そこで、体型項目(A)として座位腋窩高を含む詳細サイズが入力されているので、安全軌道制御部120は、保持具3を被介護者にアプローチする際に保持具3の上端部が被介護者の腋窩高に合うように調整する。これにより、被介護者は、無理なく安全に保持具につかまることができる。
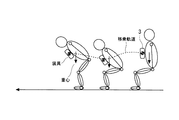
図14に動作例8を示す。
動作例8は、被介護者の体型に合わせて安全を確保しながら移乗させる場合の動作例である。
被介護者を安全に移乗支援装置に移乗させる場合には、被介護者がふらついたり、後ろに倒れてしまわないようにすることが大事である。
このとき、被介護者の重心を被介護者の足の上に移動させてから被介護者の体を保持具に載せるようにすると安定した移乗動作になる。
安全軌道制御部120は、膝高、転子高、腋窩高のデータに基づいて被介護者のリンクモデルを作成する。
リンクモデルは、膝、腿、胴のリンクをくるぶし、膝、腰のジョイントで結合した構成とする。
このモデルを用いて被介護者の重心を求めるとともに、重心軌道が安定する軌道になるように被介護者の体をサポートするための安全軌道を求める。
安全軌道の一例を具体的に挙げると、まず、被介護者の体を前下方に引きながら被介護者の重心を足の方向へ移動させる。そして、重心が足の上にきたところで被介護者の体を持ち上げるようにして保持具の上に載せるようにする。
安全軌道制御部120は、上記のような安全軌道を算出して、この安全軌道内に入るように保持具の角度およびアームの駆動を制御する。
これにより、被介護者を安全に移乗支援することができ、また、膝伸展筋に作用する負荷を軽減することができる。
動作例9として、被介護者の体重に基づく安全軌道制御が挙げられる。
被介護者の体重が重い場合には、保持具と被介護者との接触面積が小さいと、狭い範囲に大きな圧力が生じ、被介護者の体を強く圧迫してしまう問題がある。そこで、被介護者の体重が大きい場合には、例えば、乳頭位胸部厚径と腹部厚径とに基づいて保持具が被介護者の体に沿う範囲に角度を制御する。
これによって、被介護者の体圧を分散し、被介護者の体を強く圧迫しないようにできる。
動作例10として、運用データに基づいた制御が挙げられる。
個人データの入力が入力装置110によって行われ、個人データ記憶部130に被介護者の個人データが記憶されている。
個人データの入力方法としては、図6で説明した方法に同様な方法であって、この動作例10では、過去運用データとして、過去に感じた痛みや恐怖感が登録されている。
ある部位に痛みが生じた場合には、上記動作例で説明したように痛みが生じる部位に対応した安全軌道を求めて、アームおよび保持具の駆動制御を実行する。
すなわち、動作速度が速すぎて恐怖感があった場合や動作音に恐怖があった場合には、アーム駆動の最高回転速度および最高回転加速度に制限を設定する。
移乗支援動作の一連の過程で保持具の位置が高く上がりすぎることに恐怖感を感じる場合には、介護作業が可能な範囲で高さリミットを設定する。
移乗支援動作の一連の過程で保持具の傾斜角度が大きすぎることまたは小さすぎることに恐怖感を感じる場合には、介護作業が可能な範囲で保持具の角度にリミットを設定する。
上記説明において、個人データの入力を入力装置を通して行う場合を説明したが、個人データを移乗支援装置10に登録する手段としては次のような変形例が例として挙げられる。
被介護者の個人データを記録したICタグ(RFID:Radio frequency identification)またはバーコードを被介護者の名札や腕輪などに付けておく。
または被介護者の個人データを携帯電話機やPDA(携帯情報端末)に記憶させておいてもよい。そして、移乗支援装置の入力装置に送受信機能を設け、ICタグと送受信可能とする。
または、移乗支援装置の入力装置としてバーコード読み取り装置を設ける。
このような構成において、介護支援を行う前にICタグ、バーコード、携帯電話機等の情報を移乗支援装置の入力装置が読みとり、個人データに応じた安全制御を実行する。
このような構成によれば、介護支援の度に被介護者の個人データを入力しなくてもよいため、迅速な介護を行うことができる。
Claims (7)
- 被介護者の乗り移り動作を支援する移乗支援装置であって、
移動可能な台車部と、
水平回転および傾動可能であって基端が前記台車部に取り付けられたアーム部と、
前記アーム部に取り付けられた身体保持具と、
前記台車部およびアーム部を駆動させる複数の駆動手段と、
被介護者ごとの個人データを入力するための入力装置と、
前記駆動手段を駆動制御する制御部と、を備え、
前記制御部は、前記入力装置にて入力された前記被介護者ごとの個人データを記憶する個人データ記憶部と、
前記個人データに基づいて移乗支援時の前記アーム部および前記身体保持具の軌道が被介護者の安全を確保できる安全軌道内に収まるように前記駆動手段を制御する安全軌道制御部と、を備える
ことを特徴とする移乗支援装置。 - 請求項1に記載の移乗支援装置において、
前記被介護者の個人データには、疾患部位とその症状の情報を含む
ことを特徴とする移乗支援装置。 - 請求項1または請求項2に記載の移乗支援装置において、
前記被介護者の個人データには、被介護者の体型に関する情報を含む
ことを特徴とする移乗支援装置。 - 請求項1から請求項3のいずれかに記載の移乗支援装置において、
前記被介護者の個人データには、過去に移乗支援装置を利用した際の過去運用データに関する情報を含み、
前記過去運用データは、乗り移り動作時に痛みを感じた部位および恐怖を感じた要因の情報を含む
ことを特徴とする移乗支援装置。 - 請求項1から請求項4のいずれかに記載の移乗支援装置において、
前記入力装置は、
入力項目を表示する表示パネルと、入力項目ごとに個人データを入力するキーボードまたはタッチパネルセンサと、を備える
ことを特徴とする移乗支援装置。 - 請求項1から請求項4のいずれかに記載の移乗支援装置において、
前記個人データは被介護者が携帯するICタグ、バーコードまたは携帯電話機に記憶されており、
前記入力装置は、前記ICタグ、バーコードまたは携帯電話機の情報を読みとる
ことを特徴とする移乗支援装置。 - 移動可能な台車部と、水平回転および傾動可能であって基端が前記台車部に取り付けられたアーム部と、前記アーム部に取り付けられた身体保持具と、を備え、被介護者の乗り移り動作を支援する移乗支援装置の制御方法であって、
入力された被介護者ごとの個人データに基づいて移乗支援時に被介護者の安全を確保できる軌道を求め、
前記台車部、アーム部および身体保持具の軌道を前記安全軌道内に収まるように制御する
ことを特徴とする移乗支援装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008325715A JP5206393B2 (ja) | 2008-12-22 | 2008-12-22 | 移乗支援装置、移乗支援装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008325715A JP5206393B2 (ja) | 2008-12-22 | 2008-12-22 | 移乗支援装置、移乗支援装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010142562A true JP2010142562A (ja) | 2010-07-01 |
| JP5206393B2 JP5206393B2 (ja) | 2013-06-12 |
Family
ID=42563592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008325715A Active JP5206393B2 (ja) | 2008-12-22 | 2008-12-22 | 移乗支援装置、移乗支援装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5206393B2 (ja) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013118623A1 (ja) * | 2012-02-10 | 2013-08-15 | 富士機械製造株式会社 | 動作設定方法 |
| WO2014192085A1 (ja) * | 2013-05-28 | 2014-12-04 | 富士機械製造株式会社 | 介助ロボット |
| WO2015011837A1 (ja) * | 2013-07-26 | 2015-01-29 | 富士機械製造株式会社 | 介助ロボット |
| WO2015011839A1 (ja) * | 2013-07-26 | 2015-01-29 | 富士機械製造株式会社 | 介助ロボット |
| JP2015139566A (ja) * | 2014-01-29 | 2015-08-03 | トヨタ自動車株式会社 | 介護支援装置 |
| WO2015145758A1 (ja) * | 2014-03-28 | 2015-10-01 | 富士機械製造株式会社 | 介助ロボット |
| JP2016093371A (ja) * | 2014-11-14 | 2016-05-26 | トヨタ自動車株式会社 | 移乗支援装置 |
| JP2016202238A (ja) * | 2015-04-15 | 2016-12-08 | トヨタ自動車株式会社 | 移乗支援装置 |
| JPWO2014122752A1 (ja) * | 2013-02-07 | 2017-01-26 | 富士機械製造株式会社 | 介助ロボット |
| JPWO2015011838A1 (ja) * | 2013-07-26 | 2017-03-02 | 富士機械製造株式会社 | 保持具および介助ロボット |
| WO2017141336A1 (ja) * | 2016-02-15 | 2017-08-24 | 富士機械製造株式会社 | 介助ロボット |
| US9844481B2 (en) | 2015-07-13 | 2017-12-19 | Panasonic Intellectual Property Management Co., Ltd. | Standing/sitting motion assist system, standing/sitting motion assist method, standing/sitting motion assist robot, and non-transitory computer-readable recording medium |
| WO2018047326A1 (ja) * | 2016-09-12 | 2018-03-15 | 富士機械製造株式会社 | 介助装置 |
| WO2018105034A1 (ja) * | 2016-12-06 | 2018-06-14 | 株式会社アートプラン | 移乗装置 |
| JP2018134430A (ja) * | 2018-03-15 | 2018-08-30 | 株式会社Fuji | 介助ロボット |
| WO2018163308A1 (ja) * | 2017-03-07 | 2018-09-13 | 株式会社Fuji | 介助装置 |
| JPWO2017141372A1 (ja) * | 2016-02-17 | 2018-12-06 | 株式会社Fuji | 介助ロボット |
| CN109998833A (zh) * | 2019-04-04 | 2019-07-12 | 山东大学 | 一种移位机 |
| US10426682B2 (en) | 2016-01-29 | 2019-10-01 | Panasonic Intellectual Property Management Co., Ltd. | Robot, robot control method, method, and recording medium |
| JP2020028720A (ja) * | 2019-10-10 | 2020-02-27 | 株式会社Fuji | 介助ロボット |
| JPWO2020021619A1 (ja) * | 2018-07-24 | 2021-05-13 | 株式会社Fuji | 介助装置の適合判定装置 |
| WO2021228070A1 (en) * | 2020-05-11 | 2021-11-18 | Automation For Humanity Ltd. | Companion robot transfer assistant |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008067849A (ja) * | 2006-09-13 | 2008-03-27 | Univ Of Electro-Communications | 歩行器及び歩行器の制御方法 |
| JP2008073501A (ja) * | 2006-08-21 | 2008-04-03 | Toshihiko Yasuda | 移乗介助ロボット |
| JP2008086586A (ja) * | 2006-10-03 | 2008-04-17 | Kanazawa Inst Of Technology | 立ち上がり運動補助装置及び立ち上がり運動補助方法 |
-
2008
- 2008-12-22 JP JP2008325715A patent/JP5206393B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008073501A (ja) * | 2006-08-21 | 2008-04-03 | Toshihiko Yasuda | 移乗介助ロボット |
| JP2008067849A (ja) * | 2006-09-13 | 2008-03-27 | Univ Of Electro-Communications | 歩行器及び歩行器の制御方法 |
| JP2008086586A (ja) * | 2006-10-03 | 2008-04-17 | Kanazawa Inst Of Technology | 立ち上がり運動補助装置及び立ち上がり運動補助方法 |
Cited By (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013162896A (ja) * | 2012-02-10 | 2013-08-22 | Fuji Mach Mfg Co Ltd | 動作設定方法 |
| CN104114140A (zh) * | 2012-02-10 | 2014-10-22 | 富士机械制造株式会社 | 动作设定方法 |
| US20150005938A1 (en) * | 2012-02-10 | 2015-01-01 | Fuji Machine Mfg. Co., Ltd. | Motion setting method |
| US9669549B2 (en) | 2012-02-10 | 2017-06-06 | Fuji Machine Mfg. Co., Ltd. | Motion setting method |
| EP2813203A4 (en) * | 2012-02-10 | 2015-07-08 | Fuji Machine Mfg | METHOD FOR EFFECT SETTING |
| CN104114140B (zh) * | 2012-02-10 | 2017-05-17 | 富士机械制造株式会社 | 动作设定方法 |
| WO2013118623A1 (ja) * | 2012-02-10 | 2013-08-15 | 富士機械製造株式会社 | 動作設定方法 |
| JPWO2014122752A1 (ja) * | 2013-02-07 | 2017-01-26 | 富士機械製造株式会社 | 介助ロボット |
| US10166159B2 (en) | 2013-02-07 | 2019-01-01 | Fuji Corporation | Care robot |
| WO2014192085A1 (ja) * | 2013-05-28 | 2014-12-04 | 富士機械製造株式会社 | 介助ロボット |
| JPWO2014192085A1 (ja) * | 2013-05-28 | 2017-02-23 | 富士機械製造株式会社 | 介助ロボット |
| CN105246449A (zh) * | 2013-05-28 | 2016-01-13 | 富士机械制造株式会社 | 护理机器人 |
| CN105407854A (zh) * | 2013-07-26 | 2016-03-16 | 富士机械制造株式会社 | 护理机器人 |
| EP3025695A4 (en) * | 2013-07-26 | 2017-03-15 | Fuji Machine Mfg. Co., Ltd. | Assistance robot |
| CN105407854B (zh) * | 2013-07-26 | 2017-12-22 | 富士机械制造株式会社 | 护理机器人 |
| WO2015011839A1 (ja) * | 2013-07-26 | 2015-01-29 | 富士機械製造株式会社 | 介助ロボット |
| JPWO2015011837A1 (ja) * | 2013-07-26 | 2017-03-02 | 富士機械製造株式会社 | 介助ロボット |
| JPWO2015011838A1 (ja) * | 2013-07-26 | 2017-03-02 | 富士機械製造株式会社 | 保持具および介助ロボット |
| JPWO2015011839A1 (ja) * | 2013-07-26 | 2017-03-02 | 富士機械製造株式会社 | 介助ロボット |
| WO2015011837A1 (ja) * | 2013-07-26 | 2015-01-29 | 富士機械製造株式会社 | 介助ロボット |
| JP2015139566A (ja) * | 2014-01-29 | 2015-08-03 | トヨタ自動車株式会社 | 介護支援装置 |
| JPWO2015145758A1 (ja) * | 2014-03-28 | 2017-04-13 | 富士機械製造株式会社 | 介助ロボット |
| WO2015145758A1 (ja) * | 2014-03-28 | 2015-10-01 | 富士機械製造株式会社 | 介助ロボット |
| JP2016093371A (ja) * | 2014-11-14 | 2016-05-26 | トヨタ自動車株式会社 | 移乗支援装置 |
| JP2016202238A (ja) * | 2015-04-15 | 2016-12-08 | トヨタ自動車株式会社 | 移乗支援装置 |
| US9844481B2 (en) | 2015-07-13 | 2017-12-19 | Panasonic Intellectual Property Management Co., Ltd. | Standing/sitting motion assist system, standing/sitting motion assist method, standing/sitting motion assist robot, and non-transitory computer-readable recording medium |
| US10426682B2 (en) | 2016-01-29 | 2019-10-01 | Panasonic Intellectual Property Management Co., Ltd. | Robot, robot control method, method, and recording medium |
| WO2017141336A1 (ja) * | 2016-02-15 | 2017-08-24 | 富士機械製造株式会社 | 介助ロボット |
| AU2016393481B2 (en) * | 2016-02-15 | 2019-05-02 | Fuji Corporation | Assistance robot |
| JPWO2017141336A1 (ja) * | 2016-02-15 | 2018-12-06 | 株式会社Fuji | 介助ロボット |
| JPWO2017141372A1 (ja) * | 2016-02-17 | 2018-12-06 | 株式会社Fuji | 介助ロボット |
| CN109689000A (zh) * | 2016-09-12 | 2019-04-26 | 株式会社富士 | 介助装置 |
| WO2018047326A1 (ja) * | 2016-09-12 | 2018-03-15 | 富士機械製造株式会社 | 介助装置 |
| JPWO2018047326A1 (ja) * | 2016-09-12 | 2019-07-25 | 株式会社Fuji | 介助装置 |
| US11096848B2 (en) | 2016-09-12 | 2021-08-24 | Fuji Corporation | Assistance device for identifying a user of the assistance device from a spoken name |
| CN109689000B (zh) * | 2016-09-12 | 2021-05-28 | 株式会社富士 | 介助装置 |
| WO2018105034A1 (ja) * | 2016-12-06 | 2018-06-14 | 株式会社アートプラン | 移乗装置 |
| WO2018163308A1 (ja) * | 2017-03-07 | 2018-09-13 | 株式会社Fuji | 介助装置 |
| JPWO2018163308A1 (ja) * | 2017-03-07 | 2019-11-07 | 株式会社Fuji | 介助装置 |
| JP2018134430A (ja) * | 2018-03-15 | 2018-08-30 | 株式会社Fuji | 介助ロボット |
| JPWO2020021619A1 (ja) * | 2018-07-24 | 2021-05-13 | 株式会社Fuji | 介助装置の適合判定装置 |
| CN109998833A (zh) * | 2019-04-04 | 2019-07-12 | 山东大学 | 一种移位机 |
| CN109998833B (zh) * | 2019-04-04 | 2021-02-02 | 山东大学 | 一种移位机 |
| JP2020028720A (ja) * | 2019-10-10 | 2020-02-27 | 株式会社Fuji | 介助ロボット |
| WO2021228070A1 (en) * | 2020-05-11 | 2021-11-18 | Automation For Humanity Ltd. | Companion robot transfer assistant |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5206393B2 (ja) | 2013-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5206393B2 (ja) | 移乗支援装置、移乗支援装置の制御方法 | |
| KR101869968B1 (ko) | 하지 외골격을 구비한 보행 보조 로봇 | |
| EP3917482B1 (en) | Mobility aid | |
| JP5854454B2 (ja) | 装着式動作補助装置 | |
| CN101616651B (zh) | 移乘辅助装置 | |
| CN100555149C (zh) | 动力辅助控制装置与动力辅助控制方法以及复位装置 | |
| US11872171B2 (en) | Device for supporting the ability of a person with restricted mobility to move | |
| WO2016138497A1 (en) | Exoskeleton device with sitting support and method of operation thereof | |
| CN104398347B (zh) | 一种新型轮椅式电动步行训练装置及控制方法 | |
| EP3424479B1 (en) | Adaptive mobility lift | |
| KR102737115B1 (ko) | 재활훈련용 능동보행 보조로봇 | |
| US12343295B2 (en) | Standing-up assist device | |
| CN117651541A (zh) | 下肢康复固定式自动装置 | |
| JP6767563B2 (ja) | 介助装置 | |
| KR20180026692A (ko) | 하지 외골격을 구비한 보행 보조 로봇 | |
| GB2538953A (en) | Smart elderly walker | |
| CN108283551A (zh) | 无线终端控制的智能化医用病床 | |
| JP5382508B2 (ja) | 起立補助装置 | |
| KR101527593B1 (ko) | 전보행 재활 훈련기 | |
| JP2016144628A (ja) | 介護者補助装置 | |
| JPH1099389A (ja) | 歩行訓練機 | |
| JP5792269B2 (ja) | 介護者補助装置 | |
| JP2002346960A (ja) | イグゾスケルトン装置、イグゾスケルトンサイボーグ装置及び、イグゾスケルトンサイボーグシステム | |
| JP2017000190A (ja) | 動作支援装置 | |
| JP6586474B2 (ja) | 介助ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121030 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121031 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130204 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5206393 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |