JP2010155331A - バキューム式吸着装置およびロボットハンド - Google Patents
バキューム式吸着装置およびロボットハンド Download PDFInfo
- Publication number
- JP2010155331A JP2010155331A JP2009000255A JP2009000255A JP2010155331A JP 2010155331 A JP2010155331 A JP 2010155331A JP 2009000255 A JP2009000255 A JP 2009000255A JP 2009000255 A JP2009000255 A JP 2009000255A JP 2010155331 A JP2010155331 A JP 2010155331A
- Authority
- JP
- Japan
- Prior art keywords
- piston
- cylinder tube
- space
- open end
- vacuum cup
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Manipulator (AREA)
Abstract
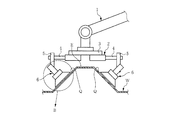
【解決手段】シリンダチューブ8と、ピストン9と、負圧通路13が形成されたピストンロッド10と、バキュームカップ11のほか、シリンダチューブ8の内周の連通路14を備えている。ピストン9が連通路14に合致していない(A)の状態で負圧通路13を通して負圧を導入する。これによりピストン9側を固定側としてシリンダチューブ8とともにバキュームカップ11をストロークSだけストロークさせて、(B)のようにワークWに押し付ける。そして、ピストン9が連通路14に合致することで負圧吸引力でワークを吸着支持する。
【選択図】図2
Description
2…ロボットハンド
3…フレーム(支持体)
6…バキューム式吸着装置
7…シリンダ
8…シリンダチューブ
9…ピストン
10…ピストンロッド
11…バキュームカップ
13…負圧通路
14…連通路
Q…傾斜面
R1…開放端側の空間
R2…反開放端側の空間
S…ストローク
W…ワーク(相手側部材)
Claims (8)
- 一端が開放しているシリンダチューブと、
上記シリンダチューブに内挿されて、そのシリンダチューブの内部を開放端側の空間と反開放端側の空間とに仕切っているピストンと、
上記ピストンに連結したピストンロッドと、
上記シリンダチューブの開放端側に装着され、相手側部材に接触することでその相手側部材を吸着可能なバキュームカップと、
上記シリンダチューブの反開放端側の空間に連通する負圧通路と、
上記シリンダチューブの内周面であって且つ軸心方向の中間位置に形成され、ピストンとの相対移動に応じてそのピストンの位置と合致した時に当該ピストンを迂回して開放端側の空間と反開放端側の空間とを連通する連通路と、
を備えていることを特徴とするバキューム式吸着装置。 - 上記ピストンが連通路に合致していない状態で負圧通路を通して反開放端側の空間に負圧を導入した時に、その反開放端側の空間の容積を減少させるようにピストンとシリンダチューブが相対移動し、
上記ピストンが連通路に合致した時に、その連通路を通して反開放端側の空間と開放端側の空間とを連通するようになっていることを特徴とする請求項1に記載のバキューム式吸着装置。 - 上記ピストンを固定側とし、バキュームカップが装着されたシリンダチューブを可動側として、両者が相対移動するようになっていることを特徴とする請求項2に記載のバキューム式吸着装置。
- 上記ピストンが連通路に合致していない状態で負圧通路を通して反開放端側の空間に負圧を導入した時に、その反開放端側の空間の容積を減少させるようにピストンに対してシリンダチューブがストローク動作し、
そのシリンダチューブのストローク動作をもってバキュームカップを相手側部材に押し付けるようになっていることを特徴とする請求項3に記載のバキューム式吸着装置。 - 上記ピストンに対するシリンダチューブのストローク動作をもってピストンが連通路に合致した時に、その連通路を通して反開放端側の空間と開放端側の空間とを連通させ、もってバキュームカップにて相手側部材を吸着するようになっていることを特徴とする請求項4に記載のバキューム式吸着装置。
- 上記ピストンを固定側とし、バキュームカップが装着されたシリンダチューブを可動側として、シリンダチューブの反開放端側の空間に負圧を導入した時に、バキュームカップが相手側部材を吸着するのに先立って、バキュームカップがシリンダチューブとともに相手側部材に向かってストローク動作するようになっていることを特徴とする請求項1に記載のバキューム式吸着装置。
- 請求項5または6に記載の複数のバキューム式吸着装置をピストンロッドが固定側なるように共通の支持体に装着してあり、その支持体を母体となる産業用ロボットのロボットアームに支持させてあることを特徴とするロボットハンド。
- 相手側部材であるワークに対してその面直角方向からアプローチ動作して当該ワークを吸着支持するロボットハンドであって、
上記ワークのうちバキュームカップにて吸着支持すべき部位が傾斜しているとともに、その傾斜した部位とバキュームカップ側の吸着面とが平行となるように予め設定してあり、
上記バキュームカップがワークに接触する直前にロボットハンドのアプローチ動作が停止するようになっているとともに、そのアプローチ動作停止位置では上記ピストンが連通路に合致していない状態で負圧通路を通して反開放端側の空間への負圧導入を開始するようになっていることを特徴とする請求項7に記載のロボットハンド。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009000255A JP5212119B2 (ja) | 2009-01-05 | 2009-01-05 | バキューム式吸着装置およびロボットハンド |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009000255A JP5212119B2 (ja) | 2009-01-05 | 2009-01-05 | バキューム式吸着装置およびロボットハンド |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010155331A true JP2010155331A (ja) | 2010-07-15 |
| JP5212119B2 JP5212119B2 (ja) | 2013-06-19 |
Family
ID=42573613
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009000255A Expired - Fee Related JP5212119B2 (ja) | 2009-01-05 | 2009-01-05 | バキューム式吸着装置およびロボットハンド |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5212119B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013078810A (ja) * | 2011-10-03 | 2013-05-02 | Smc Corp | 真空吸着装置 |
| CN103101008A (zh) * | 2013-01-31 | 2013-05-15 | 江苏大学 | 薄壁曲面零件装配定位夹具 |
| US8893455B2 (en) | 2010-09-17 | 2014-11-25 | Matcon, Ltd. | Material handling apparatus |
| CN111348436A (zh) * | 2020-04-09 | 2020-06-30 | 昆山升甫电子制品有限公司 | 一种导线板上料机构 |
| CN113199497A (zh) * | 2021-04-26 | 2021-08-03 | 安徽机电职业技术学院 | 一种基于数字孪生的工业机器人用吸附式机械抓手结构 |
| CN114055433A (zh) * | 2021-11-17 | 2022-02-18 | 深圳市诺科微科技有限公司 | 一种集成电路板生产加工设备及方法 |
| CN114211520A (zh) * | 2022-02-21 | 2022-03-22 | 鹰星精密工业(深圳)有限公司 | 一种高精度直线机械手及应用方法 |
| CN115308429A (zh) * | 2022-10-09 | 2022-11-08 | 广州国家实验室 | 一种反应杯、样品转移装置及样品转移方法 |
| CN117682177A (zh) * | 2023-12-21 | 2024-03-12 | 浙江劲刚机械有限公司 | 底托成型装盒设备及底托成型装盒方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS414020Y1 (ja) * | 1963-12-31 | 1966-03-11 | ||
| JPS4931059B1 (ja) * | 1969-03-13 | 1974-08-19 | ||
| JPS5636633Y2 (ja) * | 1977-06-06 | 1981-08-28 | ||
| JPS63151459U (ja) * | 1987-03-24 | 1988-10-05 | ||
| JPH04109888U (ja) * | 1991-03-07 | 1992-09-24 | ダイキン工業株式会社 | 真空吸着装置 |
| JPH0592385A (ja) * | 1991-03-18 | 1993-04-16 | Bridgestone Corp | 帯状部材の吸着具および吸着装置 |
| JPH05200687A (ja) * | 1991-02-26 | 1993-08-10 | Yuzuru Kawai | 吸込シリンダ型フイ−ダ |
| JPH1128687A (ja) * | 1997-05-14 | 1999-02-02 | Yasuo Yamanaka | 吸着エレメントおよび物品吸着装置 |
-
2009
- 2009-01-05 JP JP2009000255A patent/JP5212119B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS414020Y1 (ja) * | 1963-12-31 | 1966-03-11 | ||
| JPS4931059B1 (ja) * | 1969-03-13 | 1974-08-19 | ||
| JPS5636633Y2 (ja) * | 1977-06-06 | 1981-08-28 | ||
| JPS63151459U (ja) * | 1987-03-24 | 1988-10-05 | ||
| JPH05200687A (ja) * | 1991-02-26 | 1993-08-10 | Yuzuru Kawai | 吸込シリンダ型フイ−ダ |
| JPH04109888U (ja) * | 1991-03-07 | 1992-09-24 | ダイキン工業株式会社 | 真空吸着装置 |
| JPH0592385A (ja) * | 1991-03-18 | 1993-04-16 | Bridgestone Corp | 帯状部材の吸着具および吸着装置 |
| JPH1128687A (ja) * | 1997-05-14 | 1999-02-02 | Yasuo Yamanaka | 吸着エレメントおよび物品吸着装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8893455B2 (en) | 2010-09-17 | 2014-11-25 | Matcon, Ltd. | Material handling apparatus |
| JP2013078810A (ja) * | 2011-10-03 | 2013-05-02 | Smc Corp | 真空吸着装置 |
| US8960749B2 (en) | 2011-10-03 | 2015-02-24 | Smc Kabushiki Kaisha | Vacuum suction apparatus |
| CN103101008A (zh) * | 2013-01-31 | 2013-05-15 | 江苏大学 | 薄壁曲面零件装配定位夹具 |
| CN103101008B (zh) * | 2013-01-31 | 2015-09-09 | 江苏大学 | 薄壁曲面零件装配定位夹具 |
| CN111348436A (zh) * | 2020-04-09 | 2020-06-30 | 昆山升甫电子制品有限公司 | 一种导线板上料机构 |
| CN113199497A (zh) * | 2021-04-26 | 2021-08-03 | 安徽机电职业技术学院 | 一种基于数字孪生的工业机器人用吸附式机械抓手结构 |
| CN113199497B (zh) * | 2021-04-26 | 2024-01-12 | 安徽机电职业技术学院 | 一种基于数字孪生的工业机器人用吸附式机械抓手结构 |
| CN114055433A (zh) * | 2021-11-17 | 2022-02-18 | 深圳市诺科微科技有限公司 | 一种集成电路板生产加工设备及方法 |
| CN114211520A (zh) * | 2022-02-21 | 2022-03-22 | 鹰星精密工业(深圳)有限公司 | 一种高精度直线机械手及应用方法 |
| CN115308429A (zh) * | 2022-10-09 | 2022-11-08 | 广州国家实验室 | 一种反应杯、样品转移装置及样品转移方法 |
| CN117682177A (zh) * | 2023-12-21 | 2024-03-12 | 浙江劲刚机械有限公司 | 底托成型装盒设备及底托成型装盒方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5212119B2 (ja) | 2013-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5212119B2 (ja) | バキューム式吸着装置およびロボットハンド | |
| CN109789561B (zh) | 把持工具以及把持系统 | |
| CN109789564B (zh) | 把持工具以及把持系统 | |
| CN105619050B (zh) | 四通管端盖铆接机 | |
| JP2007253249A (ja) | 吸着装置及びこの吸着装置を用いた吸着方法 | |
| KR101751209B1 (ko) | 그립퍼 자동 교환 장치 | |
| JP5469657B2 (ja) | 部品移送組付装置 | |
| CN206690112U (zh) | 一种机器人末端执行器 | |
| JP2015153837A5 (ja) | ||
| US8894113B2 (en) | Robot hand and robot | |
| TWI503210B (zh) | Adsorption nozzle and adsorption device | |
| WO2011135620A1 (ja) | 加工装置 | |
| CN116133807A (zh) | 部件保持夹具、机器人系统以及部件安装方法 | |
| JP4426404B2 (ja) | ロッドの保持装置 | |
| JP5364150B2 (ja) | 部品移送装置 | |
| CN112490170A (zh) | 吸引保持器具和环状框架的保持机构 | |
| JP2011245603A (ja) | ロケート装置 | |
| CN107601097B (zh) | 一种吸嘴装置 | |
| JP7777868B2 (ja) | 搬送装置 | |
| JP4609295B2 (ja) | ワーク搬送装置 | |
| JP4246234B2 (ja) | 流体圧シリンダ | |
| JP2004202690A (ja) | 吸着保持装置 | |
| CN214924531U (zh) | 一种复合功能的机器人末端执行器 | |
| CN224102939U (zh) | 一种压装胶钉机械手及电池壳体喷涂设备 | |
| JP2009066739A (ja) | 吸着搬送方法及び吸着装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130211 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160308 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |