JP2010228703A - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP2010228703A JP2010228703A JP2009081164A JP2009081164A JP2010228703A JP 2010228703 A JP2010228703 A JP 2010228703A JP 2009081164 A JP2009081164 A JP 2009081164A JP 2009081164 A JP2009081164 A JP 2009081164A JP 2010228703 A JP2010228703 A JP 2010228703A
- Authority
- JP
- Japan
- Prior art keywords
- mode
- clutch
- engine
- motor
- travel mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18027—Drive off, accelerating from standstill
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/184—Preventing damage resulting from overload or excessive wear of the driveline
- B60W30/186—Preventing damage resulting from overload or excessive wear of the driveline excessive wear or burn out of friction elements, e.g. clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/36—Temperature of vehicle components or parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/48—Drive Train control parameters related to transmissions
- B60L2240/486—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/50—Drive Train control parameters related to clutches
- B60L2240/507—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0291—Clutch temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0676—Engine temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/025—Clutch slip, i.e. difference between input and output speeds
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Transmission Device (AREA)
Abstract
【解決手段】エンジンEngと、モータ/ジェネレータMGと、エンジンEngとモータ/ジェネレータMGとの間に介装された第1クラッチCL1と、モータ/ジェネレータMGと駆動輪RL,RRとの間に介装された第2クラッチCL2と、第1クラッチCL1を解放する「EV走行モード」と、第1クラッチCL1と第2クラッチCL2を締結する「HEV走行モード」と、第2クラッチCL2をスリップ締結する「WSC走行モード」と、を走行状態に応じて切り替えるもモード選択部200と、第2クラッチCL2の温度を検知する第2クラッチ温度センサ18と、第2クラッチCL2の温度が所定値以上のときは、走行モードにかかわらずエンジンEngを作動状態としておく第2クラッチ保護制御手段(図5)と、を備えた。
【選択図】図5
Description
エンジンと、
モータと、
前記エンジンと前記モータとの間に介装され、前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され、前記モータと前記駆動輪とを断接する第2締結要素と、
前記第1締結要素を解放し前記第2締結要素を締結し、前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素と前記第2締結要素を締結し、前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第2締結要素をスリップ締結し、前記第2締結要素を介して伝達される駆動力で走行する第3走行モードと、を走行状態に応じて切り替える走行モード切り替え手段と、
前記第2締結要素の温度を検知する温度検知手段と、
前記第2締結要素の温度が所定値以上のときは、走行モードにかかわらず前記エンジンを作動状態としておく第2締結要素保護制御手段と、
を備えたことを特徴とする。
この第1走行モードの選択領域が拡大されることにより、運転者の駆動力の不足による違和感を与えることなく、第1走行モードにより発進する頻度が高まり、逆に、エンジン始動から第3走行モードへ切り替えての発進頻度が低減される。
この結果、発進時、第2締結要素の発熱要因である第3走行モードへの切り替え頻度を低減することで、第2締結要素の耐久信頼性を確保することができる。
図1は、実施例1の制御装置が適用された後輪駆動によるFRハイブリッド車両(ハイブリッド車両の一例)を示す全体システム図である。
前記「EV走行モード」(第1走行モード)は、第1クラッチCL1を開放状態とし、モータ/ジェネレータMGの駆動力のみで走行するモードである。
前記「HEV走行モード」(第2走行モード)は、第1クラッチCL1を締結状態として走行するモードであり、モータアシスト走行モード・走行発電モード・エンジン走行モードを有し、何れかのモードにより走行する。モータアシスト走行モードは、エンジンEngとモータ/ジェネレータMGの駆動力により走行するモードをいう。走行発電モードは、エンジンEngの駆動力のうち、一部をモータ/ジェネレータMGの発電に用いながら残りを走行用駆動力として走行するモードをいう。エンジン走行モードは、エンジンEngの駆動力のみで走行するモードをいう。
前記「WSC走行モード」(第3走行モード)は、モータ/ジェネレータMGの回転数制御により、第2クラッチCL2をスリップ締結状態に維持し、第2クラッチCL2を経過するクラッチ伝達トルクが、車両状態やドライバー操作に応じて決まる要求駆動トルクとなるようにクラッチトルク容量をコントロールしながら発進するモードである。
この「WSC走行モード」は、発進前にエンジン始動と第1クラッチCL1の締結を完了させた「HEV走行モード」での車両発進時、第1クラッチCL1を切り離したままの「EV走行モード」で発進するときに「HEV走行モード」への移行が判断された場合の車両発進時、等において選択される。
実施例1におけるFRハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、インバータ3と、バッテリ4と、第1クラッチコントローラ5と、第1クラッチ油圧ユニット6と、ATコントローラ7と、第2クラッチ油圧ユニット8と、ブレーキコントローラ9と、統合コントローラ10と、を有して構成されている。なお、エンジンコントローラ1と、モータコントローラ2と、第1クラッチコントローラ5と、ATコントローラ7と、ブレーキコントローラ9と、統合コントローラ10とは、情報交換が互いに可能なCAN通信線11を介して接続されている。
ここで、第2クラッチCL2が高温判定は、図6に示すフローチャートによりなされるもので、ステップS101aにて第2クラッチCL2のフェーシング周辺温度が第1設定温度Aよりも高いと判断されると、ステップS101bへ進み、第2クラッチCL2が高温と判定される。そして、ステップS101cにて高温判定中であり、かつ、ステップS101dにて第2クラッチCL2のフェーシング周辺温度が第2設定温度B(<A)以上と判断されている限り、ステップS101bへ進み、第2クラッチCL2が高温と判定される。また、ステップS101cにて高温判定中でないと判断されたとき、あるいは、ステップS101cにて高温判定中であるが、ステップS101dにて第2クラッチCL2のフェーシング周辺温度が第2設定温度B未満と判断されたときには、ステップS101eへ進み、第2クラッチCL2の高温判定を終了する。すなわち、第2クラッチCL2のフェーシング周辺温度TCL2が、温度上昇により第1設定温度Aを超えてから、温度下降により第2設定温度B未満となるまで高温判定中とされる。
ここで、発進開始判定は、図7に示すフローチャートによりなされるもので、セレクトレンジ位置がリバース位置(R)またはドライブ位置(D)である(S103a)、アクセルON(S103b)、ブレーキOFF(S103c)、の全ての条件が成立していたらステップS103dへ進み、発進開始判定ONとされる。一方、セレクトレンジ位置がリバース位置(R)またはドライブ位置(D)である(S103a)、アクセルON(S103b)、ブレーキOFF(S103c)、の何れか1つの条件が不成立であればステップS103eへ進み、発進開始判定OFFとされる。
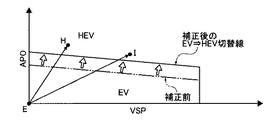
ここで、EV-HEV選択マップのEV領域の拡大補正は、エンジンEngの始動に必要なモータ/ジェネレータMGの出力を考慮した分を最大限として行う。
なお、既に「エンジン停止禁止フラグ」を立っていると共に、第1クラッチCL1が解放されている場合には、その状態を維持する。
ここで、EV-HEV選択マップのEV領域の拡大補正は、エンジンEngの始動に必要なモータ/ジェネレータMGの出力を考慮した分を最大限として行う。
実施例1のFRハイブリッド車両の制御装置における作用を、「CL2高温判定中ではないときのモード遷移制御作用」、「CL2高温判定中におけるモード遷移制御作用」、「第2クラッチ保護制御作用」に分けて説明する。
以下、図5のフローチャートを用いて、CL2高温判定中ではないときのモード遷移制御作用を説明する。
そして、ステップS122では、図3に示すEV-HEV選択マップを用い、第1クラッチCL1を解放している「EV走行モード」ではエンジンEngを停止する通常のモード遷移制御が実行される。
以下、図5のフローチャートを用いて、CL2高温判定中でHEV発進時のモード遷移制御作用を説明する。
実施例1において、第2クラッチCL2が高温であるとの判定中に実行される第2クラッチ保護制御は、下記の点を特徴としている。
実施例1のエンジン停止禁止判定ロジックは、第2クラッチCL2のフェーシング周辺温度が高温のときには、エンジンEngを停止させないとしている。具体的には、
・発進開始判定時のEV領域では、止まっているエンジンEngを作動し、作動したら第1クラッチCL1を切り離し、エンジンEngの停止を禁止する(ステップS105)。
・エンジン回転中でEV領域では、第1クラッチCL1を切り離し、エンジンEngの停止を禁止する(ステップS113)。
・エンジン回転中でWSC領域では、エンジンEngの停止を禁止する(ステップS112)。
を採用している。
なお、発進開始判定は、発進や加速の意図を検知するもので、図7に示すように、DレンジやRレンジやアクセルONやブレーキOFFを判定に用いる。また、「EV走行モード」で回生以上のエンジンブレーキが必要な場合には、第1クラッチCL1を締結する。
実施例1のEV可能領域判定ロジックは、「EV走行モード」の選択中にエンジンEngが作動状態であるかどうかでエンジン始動余力の必要性を判断し、予め設定されているEV-HEV選択マップのEV領域を拡大する補正を行うようにしている(ステップS106、ステップS115)。
すなわち、補正前のEV-HEV選択マップのEV→HEV切替線は、図8に示すように、「EV走行モード」の領域をバッテリSOCやモータ回転数(出力特性)等によって決めている。
これに対し、補正前のEV-HEV選択マップのEV→HEV切替線は、図8に示すように、「EV走行モード」の領域を、エンジン始動余力を最大限として、「HEV走行モード」の領域側に拡大している。
比較例の場合には、図8に示すように、運転点Fでは「HEV走行モード」が判定されているため、図9の比較例のモード遷移特性に示すように、「EV走行モード」→「WSC走行モード」→「HEV走行モード」へとモード遷移する。
これに対し、実施例1−1の場合には、アクセル急踏みが無く、運転点Fは、図8に示すように、拡大されたEV領域内に存在するため、図9の実施例1−1のモード遷移特性に示すように、EV発進となり、その後、「HEV走行モード」へ移行する。
実施例1のアクセル踏み込み発進時にEVで粘らせる制御ロジックは、EV発進時にアクセルが踏み込まれた場合、運転者からの要求駆動力が達成できなくても、所定の範囲で「EV走行モード」を粘らせるようにしている。
比較例の場合には、図9の比較例のモード遷移特性に示すように、WSC発進になるのに対し、実施例1−2の場合には、図8に示すように、運転点Gでは「HEV走行モード」が判定されている。しかし、図9の回転数特性に示すように、モータ回転数がエンジン回転数に到達するまでは「WSC走行モード」への移行を禁止しているため、実施例1−2のモード遷移特性に示すように、時刻t0から時刻t1までは「EV走行モード」が維持される。そして、時刻t1にて第1クラッチCL1が締結されることで、時刻t1からは「HEV走行モード」に移行するという「WSC走行モード」を省略したモード遷移になる。
実施例1のFRハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
このため、発進時、第2締結要素(第2クラッチCL2)の発熱要因である第3走行モード(「WSC走行モード」)への切り替え頻度を低減することで、第2締結要素の耐久信頼性を確保することができる。また、走行中にエンジン始動する際、第2締結要素のスリップ頻度を低減することができる。
このため、発進時、第2締結要素(第2クラッチCL2)が過熱し易い第3走行モード(「WSC走行モード」)に入る頻度を低減することができる。
このため、既存のマップ(EV-HEV選択マップ)を補正するだけの簡単な構成により、運転者の要求駆動力に応えつつ、確実に第2締結要素(第2クラッチCL2)が過熱し易い第3走行モード(「WSC走行モード」)に入る頻度を低減することができる。
このため、第3走行モード(「WSC走行モード」)への移行禁止により、さらなる第2締結要素(第2クラッチCL2)の熱保護を図ることができると共に、モード遷移ショックを抑えながら、第1走行モード(「EV走行モード」)から第2走行モード(「HEV走行モード」)へのモード遷移を達成することができる。
図10は、実施例2の統合コントローラ10にて実行される第2クラッチ保護制御処理の流れを示すフローチャートである(第2締結要素保護制御手段)。以下、図10に示すフローチャートの各ステップについて説明する。
なお、ステップS201〜ステップS216、ステップ220〜ステップS222の各ステップについては、図5のステップS101〜ステップS116、ステップ120〜ステップS122の各ステップと同じ処理を行うので、説明を省略する。
なお、図1〜図4ならびに図6、図7の構成は、実施例1と同様であるので、図示と説明を省略する。
(アクセル踏み込み発進時にEVで粘らせる制御ロジック)
実施例2のアクセル踏み込み発進時にEVで粘らせる制御ロジックは、EV発進時にアクセルが踏み込まれた場合、運転者からの要求駆動力が達成できなくても、所定の範囲で「EV走行モード」を粘らせるようにしている。
なお、他の作用は、実施例1と同様であるので、説明を省略する。
実施例2のFRハイブリッド車両の制御装置にあっては、実施例1の(1)〜(3)の効果に加え、下記の効果を得ることができる。
このため、要求駆動力の変化速度が所定値(設定速度C)以下のときには、運転者の駆動力要求度が低いとの推定に基づき、「EV走行モード」を維持することで、違和感を最小限に抑えながら、さらなる第2クラッチCL2の熱保護を達成することができる。
MG モータ/ジェネレータ(モータ)
AT 自動変速機
CL1 第1クラッチ(第1締結要素)
CL2 第2クラッチ(第2締結要素)
RL 左後輪
RR 右後輪
1 エンジンコントローラ
2 モータコントローラ
3 インバータ
4 バッテリ
5 第1クラッチコントローラ
6 第1クラッチ油圧ユニット
7 ATコントローラ
8 第2クラッチ油圧ユニット
9 ブレーキコントローラ
10 統合コントローラ
Claims (5)
- エンジンと、
モータと、
前記エンジンと前記モータとの間に介装され、前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され、前記モータと前記駆動輪とを断接する第2締結要素と、
前記第1締結要素を解放し前記第2締結要素を締結し、前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素と前記第2締結要素を締結し、前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第2締結要素をスリップ締結し、前記第2締結要素を介して伝達される駆動力で走行する第3走行モードと、を走行状態に応じて切り替える走行モード切り替え手段と、
前記第2締結要素の温度を検知する温度検知手段と、
前記第2締結要素の温度が所定値以上のときは、走行モードにかかわらず前記エンジンを作動状態としておく第2締結要素保護制御手段と、
を備えたことを特徴とするハイブリッド車両の制御装置。 - 請求項1に記載されたハイブリッド車両の制御装置において、
前記第2締結要素保護制御手段は、前記エンジンを作動状態としておく保護制御時、第1走行モードを選択する領域条件を、保護制御を行わない時に比べて拡大することを特徴とするハイブリッド車両の制御装置。 - 請求項2に記載されたハイブリッド車両の制御装置において、
前記走行モード切り替え手段は、少なくともアクセル開度に基づいて走行モードが判定されるマップを備え、
前記第2締結要素保護制御手段は、前記エンジンを作動状態としておく保護制御時、エンジン始動に必要なモータ出力を考慮した分を最大限とし、前記マップにおける第1走行モードの領域を拡大する補正を行うマップ補正部を有することを特徴とするハイブリッド車両の制御装置。 - 請求項3に記載されたハイブリッド車両の制御装置において、
前記第2締結要素保護制御手段は、車両停止状態からの発進時であって、補正後の前記マップにおいて第1走行モードから第3走行モードに切り替わることが判定されても、モータ回転数がエンジン回転数以上になるまで第3走行モードへの移行を禁止する第3走行モード移行禁止部と、モータ回転数がエンジン回転数以上になると前記第1締結要素を締結して第2走行モードに移行する第2走行モード移行部と、を有することを特徴とするハイブリッド車両の制御装置。 - 請求項3または請求項4に記載されたハイブリッド車両の制御装置において、
前記第2締結要素保護制御手段は、車両停止状態からの発進時であって、補正後の前記マップにおいて第1走行モードから第3走行モードに切り替わることが判定されても、要求駆動力の変化速度が所定値以下の場合、第1走行モードをそのまま維持する第1走行モード維持部を有することを特徴とするハイブリッド車両の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009081164A JP5080525B2 (ja) | 2009-03-30 | 2009-03-30 | ハイブリッド車両の制御装置 |
| EP10156274A EP2236374B1 (en) | 2009-03-30 | 2010-03-12 | Control apparatus for hybrid vehicle |
| US12/730,693 US8512201B2 (en) | 2009-03-30 | 2010-03-24 | Control apparatus for hybrid vehicle |
| KR1020100027036A KR101636580B1 (ko) | 2009-03-30 | 2010-03-26 | 하이브리드 차량의 제어 장치 |
| CN201010145611.7A CN101850768B (zh) | 2009-03-30 | 2010-03-26 | 混合动力车辆的控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009081164A JP5080525B2 (ja) | 2009-03-30 | 2009-03-30 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010228703A true JP2010228703A (ja) | 2010-10-14 |
| JP5080525B2 JP5080525B2 (ja) | 2012-11-21 |
Family
ID=42243396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009081164A Active JP5080525B2 (ja) | 2009-03-30 | 2009-03-30 | ハイブリッド車両の制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8512201B2 (ja) |
| EP (1) | EP2236374B1 (ja) |
| JP (1) | JP5080525B2 (ja) |
| KR (1) | KR101636580B1 (ja) |
| CN (1) | CN101850768B (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012086717A (ja) * | 2010-10-21 | 2012-05-10 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2013220663A (ja) * | 2012-04-12 | 2013-10-28 | Hino Motors Ltd | ハイブリッド自動車の制御装置、ハイブリッド自動車、およびハイブリッド自動車の制御方法、並びにプログラム |
| JP2014133553A (ja) * | 2013-01-08 | 2014-07-24 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2015033903A (ja) * | 2013-08-08 | 2015-02-19 | 本田技研工業株式会社 | 車両の制御装置 |
| WO2015037588A1 (ja) * | 2013-09-13 | 2015-03-19 | ジヤトコ株式会社 | ハイブリッド車両の故障判定装置及びその故障判定方法 |
| JP2016128318A (ja) * | 2011-02-01 | 2016-07-14 | ジャガー・ランド・ローバー・リミテッドJaguar Land Rover Limited | ハイブリッド電気自動車の制御器及び制御方法 |
| JP2016203701A (ja) * | 2015-04-17 | 2016-12-08 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| CN107002782A (zh) * | 2014-11-20 | 2017-08-01 | 日产自动车株式会社 | 车辆用起步离合器的磨合控制装置 |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009047052A1 (de) * | 2009-11-24 | 2011-05-26 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Hybridfahrzeuges |
| CN102725170B (zh) * | 2010-01-30 | 2015-04-08 | 丰田自动车株式会社 | 车辆用驱动装置的控制装置 |
| KR20130036006A (ko) | 2010-02-23 | 2013-04-09 | 이턴 코포레이션 | 차량용 토크 변환기 제어 |
| EP2500222A4 (en) * | 2010-03-31 | 2017-11-08 | Aisin AW Co., Ltd. | Control device |
| EP2629389A1 (en) * | 2010-10-15 | 2013-08-21 | Sanyo Electric Co., Ltd. | Power supply system |
| EP2634060B1 (en) * | 2010-10-26 | 2023-12-13 | Nissan Motor Co., Ltd. | Control device and control method for hybrid vehicle |
| DE102010043590A1 (de) * | 2010-11-09 | 2012-05-10 | Zf Friedrichshafen Ag | Verfahren zur Steuerung eines Antriebsstrangs |
| KR20120062259A (ko) * | 2010-12-06 | 2012-06-14 | 현대자동차주식회사 | 하이브리드 자동차의 마찰요소 보호장치 및 방법 |
| JP5501260B2 (ja) * | 2011-02-03 | 2014-05-21 | ジヤトコ株式会社 | 車両の制御装置 |
| CN103619681B (zh) * | 2011-06-28 | 2016-02-17 | 丰田自动车株式会社 | 车辆用驱动装置的控制装置 |
| JP2013018391A (ja) * | 2011-07-12 | 2013-01-31 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP5472227B2 (ja) * | 2011-08-08 | 2014-04-16 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP5505734B2 (ja) * | 2011-08-08 | 2014-05-28 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP2013035441A (ja) * | 2011-08-09 | 2013-02-21 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP5565637B2 (ja) | 2011-08-24 | 2014-08-06 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP5761365B2 (ja) * | 2011-10-27 | 2015-08-12 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP5790781B2 (ja) * | 2011-12-08 | 2015-10-07 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| WO2013111258A1 (ja) * | 2012-01-23 | 2013-08-01 | トヨタ自動車株式会社 | 車両および車両用制御方法 |
| JP5824737B2 (ja) * | 2012-01-24 | 2015-11-25 | ジヤトコ株式会社 | ハイブリッド車のエンジン始動制御装置 |
| WO2013137080A1 (ja) * | 2012-03-13 | 2013-09-19 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6115022B2 (ja) * | 2012-04-19 | 2017-04-19 | 日産自動車株式会社 | 車両の制御装置 |
| WO2014054813A1 (ja) * | 2012-10-05 | 2014-04-10 | アイシン・エィ・ダブリュ株式会社 | 車輌用駆動装置の制御装置 |
| JP6015774B2 (ja) * | 2012-12-25 | 2016-10-26 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP5939309B2 (ja) * | 2012-12-26 | 2016-06-22 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US9586576B2 (en) * | 2013-01-22 | 2017-03-07 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle control device |
| WO2014114292A1 (de) * | 2013-01-25 | 2014-07-31 | Schaeffler Technologies Gmbh & Co. Kg | Steuerung eines verbrennungsmotors |
| JP6052398B2 (ja) * | 2013-04-10 | 2016-12-27 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| KR101490914B1 (ko) * | 2013-06-11 | 2015-02-09 | 현대자동차 주식회사 | 하이브리드 자동차의 오일펌프 시스템 및 그 제어방법 |
| US9352738B2 (en) | 2013-07-31 | 2016-05-31 | Allison Transmission, Inc. | Dual clutch powertrain architecture |
| JP6027507B2 (ja) * | 2013-08-27 | 2016-11-16 | ジヤトコ株式会社 | 回転センサの信号処理装置 |
| JP6176011B2 (ja) * | 2013-09-11 | 2017-08-09 | トヨタ自動車株式会社 | 車両の制御装置 |
| WO2015049806A1 (ja) * | 2013-10-04 | 2015-04-09 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| CN103587522B (zh) * | 2013-12-04 | 2016-02-10 | 安徽工业大学 | 一种混合动力汽车动力总成智能控制方法 |
| CN103661355B (zh) * | 2013-12-04 | 2016-05-18 | 安徽工业大学 | 一种混合动力汽车动力总成智能控制系统 |
| KR101518900B1 (ko) * | 2014-02-17 | 2015-05-11 | 현대자동차 주식회사 | 하이브리드 자동차의 모드 제어 장치 및 제어 방법 |
| DE102015213317A1 (de) * | 2014-08-13 | 2016-02-18 | Schaeffler Technologies AG & Co. KG | Verfahren zur Ermittlung eines Tastpunktes einer Hybridtrennkupplung eines Hybridfahrzeuges |
| CN104354584B (zh) * | 2014-11-03 | 2017-06-20 | 北京汽车研究总院有限公司 | 一种调整车辆驱动方式的方法、装置及车辆 |
| CN104907476B (zh) * | 2015-05-25 | 2017-01-18 | 山东金辰机械股份有限公司 | 楔式热模锻压力机偏心套调整锁紧机构 |
| MX366082B (es) * | 2015-06-09 | 2019-06-27 | Nissan Motor | Dispositivo de control de transicion de modo para vehiculo hibrido. |
| US10690102B2 (en) * | 2015-06-11 | 2020-06-23 | Honda Motor Co., Ltd. | Internal-combustion engine starting device, vehicle, and internal-combustion engine starting method |
| KR101745253B1 (ko) | 2016-03-14 | 2017-06-09 | 현대자동차주식회사 | 변속기클러치 과열 방지 방법 |
| US11110908B2 (en) * | 2017-04-17 | 2021-09-07 | Hyundai Motor Company | Hybrid vehicle and method of controlling mode transition thereof |
| DE102017214787A1 (de) * | 2017-08-23 | 2019-02-28 | Bayerische Motoren Werke Aktiengesellschaft | Impulsstart in einem Hybrid-Antriebsstrang |
| US10399557B2 (en) * | 2017-11-10 | 2019-09-03 | Ford Global Technologies, Llc | Engine/motor torque control for torque hole filling in a hybrid vehicle during automatic transmission shifting |
| US10724610B2 (en) * | 2018-12-11 | 2020-07-28 | GM Global Technology Operations LLC | Hybrid powertrain |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006205900A (ja) * | 2005-01-28 | 2006-08-10 | Motor Jidosha Kk | ハイブリッド電気自動車の駆動制御装置 |
| JP2007314097A (ja) * | 2006-05-29 | 2007-12-06 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。 |
| JP2008007094A (ja) * | 2006-05-29 | 2008-01-17 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。 |
| JP2008179339A (ja) * | 2006-12-26 | 2008-08-07 | Nissan Motor Co Ltd | ハイブリッド車両のモード切り替え制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004002061A1 (de) | 2004-01-15 | 2005-08-04 | Zf Friedrichshafen Ag | Verfahren zum Steuern und Regeln eines Antriebsstranges eines Hybridfahrzeuges und Antriebsstrang eines Hybridfahrzeugs |
| JP2007099141A (ja) * | 2005-10-06 | 2007-04-19 | Nissan Motor Co Ltd | ハイブリッド車両のエンジン始動制御装置 |
| EP1862364B1 (en) * | 2006-05-29 | 2016-05-25 | Nissan Motor Co., Ltd. | Vehicle Control |
| US8060266B2 (en) * | 2006-12-26 | 2011-11-15 | Nissan Motor Co., Ltd. | Mode changeover control device for a hybrid vehicle |
| JP2008247155A (ja) * | 2007-03-30 | 2008-10-16 | Mazda Motor Corp | ハイブリッド車両の制御装置 |
| JP2009081164A (ja) | 2007-09-25 | 2009-04-16 | Honma Kogyo Kk | 複合切断装置、及びその方法 |
| JP5167786B2 (ja) * | 2007-11-29 | 2013-03-21 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
-
2009
- 2009-03-30 JP JP2009081164A patent/JP5080525B2/ja active Active
-
2010
- 2010-03-12 EP EP10156274A patent/EP2236374B1/en active Active
- 2010-03-24 US US12/730,693 patent/US8512201B2/en active Active
- 2010-03-26 KR KR1020100027036A patent/KR101636580B1/ko not_active Expired - Fee Related
- 2010-03-26 CN CN201010145611.7A patent/CN101850768B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006205900A (ja) * | 2005-01-28 | 2006-08-10 | Motor Jidosha Kk | ハイブリッド電気自動車の駆動制御装置 |
| JP2007314097A (ja) * | 2006-05-29 | 2007-12-06 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。 |
| JP2008007094A (ja) * | 2006-05-29 | 2008-01-17 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。 |
| JP2008179339A (ja) * | 2006-12-26 | 2008-08-07 | Nissan Motor Co Ltd | ハイブリッド車両のモード切り替え制御装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012086717A (ja) * | 2010-10-21 | 2012-05-10 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2016128318A (ja) * | 2011-02-01 | 2016-07-14 | ジャガー・ランド・ローバー・リミテッドJaguar Land Rover Limited | ハイブリッド電気自動車の制御器及び制御方法 |
| JP2013220663A (ja) * | 2012-04-12 | 2013-10-28 | Hino Motors Ltd | ハイブリッド自動車の制御装置、ハイブリッド自動車、およびハイブリッド自動車の制御方法、並びにプログラム |
| JP2014133553A (ja) * | 2013-01-08 | 2014-07-24 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2015033903A (ja) * | 2013-08-08 | 2015-02-19 | 本田技研工業株式会社 | 車両の制御装置 |
| WO2015037588A1 (ja) * | 2013-09-13 | 2015-03-19 | ジヤトコ株式会社 | ハイブリッド車両の故障判定装置及びその故障判定方法 |
| JPWO2015037588A1 (ja) * | 2013-09-13 | 2017-03-02 | ジヤトコ株式会社 | ハイブリッド車両の故障判定装置及びその故障判定方法 |
| CN107002782A (zh) * | 2014-11-20 | 2017-08-01 | 日产自动车株式会社 | 车辆用起步离合器的磨合控制装置 |
| US10006509B2 (en) | 2014-11-20 | 2018-06-26 | Nissan Motor Co., Ltd. | Adaptive control device for vehicle starting clutch |
| JP2016203701A (ja) * | 2015-04-17 | 2016-12-08 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5080525B2 (ja) | 2012-11-21 |
| EP2236374B1 (en) | 2012-11-28 |
| KR101636580B1 (ko) | 2016-07-05 |
| US8512201B2 (en) | 2013-08-20 |
| EP2236374A1 (en) | 2010-10-06 |
| US20100248893A1 (en) | 2010-09-30 |
| KR20100109421A (ko) | 2010-10-08 |
| CN101850768A (zh) | 2010-10-06 |
| CN101850768B (zh) | 2014-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5080525B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5103992B2 (ja) | ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。 | |
| JP5419627B2 (ja) | ハイブリッド車両の制御装置 | |
| CN103260982B (zh) | 混合动力车辆的发动机启动控制装置 | |
| JP5012227B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5834393B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5262197B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5024278B2 (ja) | ハイブリッド車両の制御装置。 | |
| JP2010144851A (ja) | 車両の制御装置 | |
| JP6485292B2 (ja) | 電動車両の電力制御方法および電力制御装置 | |
| JP2010188776A (ja) | ハイブリッド車両の制御装置 | |
| JP5299146B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5251483B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6492908B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5556580B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2010215097A (ja) | ハイブリッド車両のクラッチ制御装置 | |
| JP4973113B2 (ja) | 車両の制御装置 | |
| JP5029592B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4998436B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5381120B2 (ja) | ハイブリッド車両の変速制御装置および変速制御方法 | |
| JP4915233B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5598256B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5338473B2 (ja) | エンジン始動制御装置 | |
| JP5344062B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5527159B2 (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110609 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120828 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120830 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150907 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5080525 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313118 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |