JP2010247633A - 減衰力制御装置 - Google Patents
減衰力制御装置 Download PDFInfo
- Publication number
- JP2010247633A JP2010247633A JP2009098596A JP2009098596A JP2010247633A JP 2010247633 A JP2010247633 A JP 2010247633A JP 2009098596 A JP2009098596 A JP 2009098596A JP 2009098596 A JP2009098596 A JP 2009098596A JP 2010247633 A JP2010247633 A JP 2010247633A
- Authority
- JP
- Japan
- Prior art keywords
- damping force
- wheel side
- wheel
- front wheel
- sprung
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Landscapes
- Vehicle Body Suspensions (AREA)
Abstract
【課題】 バネ上部材の上下振動、ロール振動、ピッチ振動が統合的に抑制され、且つ、演算負荷が抑えられるように減衰力を制御することができる減衰力制御装置を提供すること。
【解決手段】 車両の旋回状態がアンダーステア状態であるときには後輪近似3輪モデルを用いて計算された要求減衰力によりバネ上部材HAの各輪位置に取付けられたサスペンション装置の減衰力を制御し、車両の旋回状態がオーバーステア状態であるときには前輪近似3輪モデルを用いて計算された要求減衰力によりバネ上部材HAの各輪位置に取付けられたサスペンション装置の減衰力を制御する。
【選択図】 図8
【解決手段】 車両の旋回状態がアンダーステア状態であるときには後輪近似3輪モデルを用いて計算された要求減衰力によりバネ上部材HAの各輪位置に取付けられたサスペンション装置の減衰力を制御し、車両の旋回状態がオーバーステア状態であるときには前輪近似3輪モデルを用いて計算された要求減衰力によりバネ上部材HAの各輪位置に取付けられたサスペンション装置の減衰力を制御する。
【選択図】 図8
Description
本発明は、車両のサスペンション装置により発生される減衰力を制御する減衰力制御装置に関する。
車両のサスペンション装置は、バネ上部材とバネ下部材との間に介装されたバネおよびダンパ(ショックアブソーバ)を備える。ダンパは、バネ上部材とバネ下部材との間の振動を減衰する機能を有する。減衰力制御装置は、このダンパの減衰力特性(減衰係数)を可変制御することにより、サスペンション装置により発生される減衰力を制御する。
サスペンション装置により発生される減衰力を制御するための制御理論として、スカイフック制御理論がよく知られている。スカイフック制御理論によれば、バネ上−路面間相対速度とバネ上速度との積が正であるときに、ダンパの減衰係数がバネ上−路面間相対速度とバネ上速度との比に比例するように制御され、上記積が負であるときにダンパの減衰係数が最低減衰係数となるように制御される。このスカイフック制御理論を減衰力制御に適用した場合、上記積が正から負に切り替わることにより振動を加振する要求(アクティブ要求)がなされた際に減衰力が急激に低下する。これにより大きな減衰力変動が生じる。
また、サスペンション装置の減衰力の他の制御理論として、非線形H∞制御理論も知られている。非線形H∞制御理論によれば、車両モデルから得られる運動方程式に基づいて双線形システムとなるように設計された状態空間表現により表される減衰力制御システムに対し、近似的にリカッチ不等式を満たすように制御則(フィードバックコントローラ)が算出される。制御則に基づいて減衰力を制御することにより、バネ上部材の振動が抑制制御される。非線形H∞制御理論を適用した場合、減衰力(要求減衰力)が滑らかに変化する。このため、スカイフック制御理論を適用した場合と比較して急激な減衰力変動が抑えられる。
特許文献1は、車両の単輪モデルを基に設計された減衰力制御システムに非線形H∞制御理論を適用することにより、車両に取付けられる複数(例えば4個)のサスペンション装置の減衰力を個々に独立制御する減衰力制御装置を開示している。特許文献1に記載の減衰力制御装置は、車両の単輪モデルから導かれるバネ上部材およびバネ下部材の上下運動に基づいて設計された状態空間表現により表される減衰力制御システム(一般化プラント)に非線形H∞制御理論を適用することにより、それぞれのサスペンション装置の減衰力を制御する。
特許文献2は、車両の4輪モデルを基に設計された減衰力制御システムに非線形H∞制御を適用することにより、各輪位置に設けられるサスペンション装置の減衰力を統合的に制御する減衰力制御装置を開示している。特許文献2に記載の減衰力制御装置は、車両の4輪モデルから導かれるバネ上部材の上下(ヒーブ)運動、ロール(前後軸周り)運動、ピッチ(左右軸周り)運動、各輪位置におけるバネ下部材の上下運動に基づいて設計された状態空間表現により表される減衰力制御システム(一般化プラント)に非線形H∞制御理論を適用することにより、バネ上部材の3方向(上下方向、ロール方向、ピッチ方向)の振動を抑制するように、各サスペンション装置の減衰力を統合的に制御する。
特許文献2に記載の発明によれば、4輪モデルを用いて非線形H∞制御理論に基づき減衰力を制御することにより、バネ上部材の上下方向、ロール方向、ピッチ方向の振動が統合的に抑制される。これにより制御目標位置における乗り心地が向上する。しかし、制御則を算出するために用いられる行列の次数が多いために演算負荷が増加するという問題が生じる。演算負荷を抑えるための一つの方法は、各サスペンション装置を、路面に対してバネ上部材のみが相対変位する1自由度振動系と考え、バネ上部材の3方向の運動(上下運動、ロール運動、ピッチ運動)に基づいて設計される状態空間表現により表される減衰力制御システムに非線形H∞制御を適用して減衰力を制御する方法である。この制御方法によれば、バネ下部材の運動を考慮しないために演算負荷の軽減が期待される。しかし、このようなモデルに基づいて設計される制御システムは不可制御であるため制御則を算出することができない。
表1は、各減衰力制御システムの可制御性と、そのシステムの状態空間表現における操作量(制御入力)、状態量の個数、状態空間表現の基礎になるモデルの自由度を比較した表である。

制御システムが可制御であるということは、そのシステムに作用する外乱に対して、状態量を所望の値に制御することができるだけの操作量(制御入力)が存在することと言い換えることができる。つまり、制御システムの基礎となるモデルの自由度が、外乱入力によるバネ上部材の自由度よりも少なくない場合(多い場合もしくは等しい場合)には、その制御システムは可制御であるということができる。逆に、モデルの自由度が、外乱入力によるバネ上部材の自由度よりも少ない場合には、その制御システムは不可制御である。
表1の(1)に示されるように、車両モデルが単輪モデルであり、バネ上部材の自由度が1自由度、サスペンション装置の自由度が2自由度(バネ上部材の上下運動およびバネ下部材の上下運動)である場合、そのモデルにより表される制御システムは可制御である。このシステムの外乱は、車輪の接地路面の上下変位(路面変位)により表される。この外乱をバネ上部材の変位に変換(モード変換)すると、外乱はバネ上部材の上下変位により表される。したがって、外乱によるバネ上部材の自由度は1自由度(上下運動)である。これに対してモデルの自由度は、バネ上部材の自由度にバネ下部材の自由度を加えた2自由度である。よって、モデルの自由度が外乱入力によるバネ上部材の自由度よりも多いため、この制御システムは可制御である。
表1の(2)に示されるように、車両モデルが4輪モデルであり、バネ上部材の自由度が3自由度(上下運動、ロール運動、ピッチ運動)、サスペンション装置の自由度が2自由度(バネ上運動、バネ下運動)である場合、そのモデルにより表される制御システムは可制御である。このシステムの外乱は各輪(4輪)位置における路面変位により表される。この外乱をバネ上部材の変位にモード変換すると、外乱は、バネ上部材の上下変位、ロール変位、ピッチ変位、およびワープ(ねじれ)変位により表される。したがって、外乱によるバネ上部材の自由度は、本来は4自由度である。これに対してモデルの自由度は、バネ上部材の3自由度(上下運動、ロール運動、ピッチ運動)に、各輪位置におけるバネ下部材の自由度(上下運動)を加えた7自由度である。よって、モデルの自由度が外乱入力によるバネ上部材の自由度よりも多いため、この制御システムは可制御である。
表1の(3)に示されるように、車両モデルが4輪モデルであり、バネ上部材の自由度が3自由度(上下運動、ロール運動、ピッチ運動)、サスペンション装置の自由度が1自由度(バネ上部材の上下運動)である場合、そのモデルにより表される制御システムは不可制御である。このシステムの外乱入力によるバネ上部部材の自由度は上述のように4自由度である。これに対し、モデルの自由度は、バネ上部材の運動(上下運動、ロール運動、ピッチ運動)により表される3自由度である(モデルにおいてバネ上部材を剛体と仮定した場合、ワープ運動方程式は導出できない)。よって、モデルの自由度(3自由度)が外乱によるバネ上部材の自由度(4自由度)よりも少ないため、この制御システムは不可制御である。
このように、4輪モデルに非線形H∞制御理論を適用して減衰力を制御する場合において、演算負荷を抑えるためにサスペンション装置を1自由度振動系モデルとして表した場合、そのモデルにより表される制御システムが不可制御となるため減衰力を制御することができない。
本発明は、上記問題に対処するためになされたものであり、車両のサスペンション装置の減衰力を制御する減衰力制御装置において、バネ上部材の上下振動、ロール振動、ピッチ振動が統合的に抑制され、且つ、演算負荷が抑えられるように減衰力を制御することができる減衰力制御装置を提供することを目的とする。
本発明の特徴は、車両のバネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御する減衰力制御装置において、バネ上部材の左右前輪位置に取付けられた2個の前輪側サスペンション装置またはバネ上部材の左右後輪位置に取付けられた2個の後輪側サスペンション装置が1個の仮想サスペンション装置に置き換えられた車両の運動を表す3輪モデルから導出されるバネ上部材の上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前記3輪モデルに表される3個のサスペンション装置により発生されるべき制御目標の減衰力である要求減衰力を計算し、計算した要求減衰力のうち前記仮想サスペンション装置についての要求減衰力を、その仮想サスペンション装置に置き換えられた2個のサスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算する要求減衰力計算手段と、前記要求減衰力計算手段により計算された要求減衰力に基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御する減衰力制御手段と、を備える減衰力制御装置としたことにある。
この場合、前記要求減衰力計算手段は、前記3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算するモデル要求減衰力計算手段と、前記モデル要求減衰力計算手段により計算された要求減衰力のうち前記仮想サスペンション装置についての要求減衰力を、その仮想サスペンション装置に置き換えられた2個のサスペンション装置についての要求減衰力に分配する要求減衰力分配手段と、を備えるのがよい。
上記発明によれば、車両の3輪モデルに基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力が計算される。3輪モデルは、バネ上部材の左右前輪位置に取付けられた2個の前輪側サスペンション装置またはバネ上部材の左右後輪位置に取付けられた2個の後輪側サスペンション装置を1個の仮想サスペンション装置に置き換えた車両モデルである。車両モデルが3輪モデルである場合、この3輪モデルにより表される制御システムの外乱は、3個のサスペンション装置に連結した車輪の接地路面の変位(または変位速度)である。この外乱をバネ上部材の変位にモード変換した場合、外乱は、バネ上部材の上下変位、ロール変位、ピッチ変位により表すことができる。したがって、外乱入力によるバネ上部材の自由度は3自由度(上下運動、ロール運動、ピッチ運動)である。また、3輪モデルにおいて、剛体として考えられるバネ上部材は上下方向、ロール方向、ピッチ方向に運動する。各サスペンション装置をバネ上部材の運動のみを考慮する1自由度振動系とした場合、モデルの自由度と外乱入力によるバネ上部材の自由度が等しい。このため、3輪モデルから導出される運動(上下運動、ロール運動、ピッチ運動)により表される制御システムは可制御である。
このように車両モデルが3輪モデルである場合、モデルにより表される制御システムが可制御である。したがって、可制御なシステムに非線形H∞制御理論を適用することにより、そのモデルに表される3個のサスペンション装置についての要求減衰力を計算することができる。そして、仮想サスペンション装置についての要求減衰力を、その仮想サスペンション装置に置き換えられた2個のサスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算することができる。こうして計算された4個のサスペンション装置についての要求減衰力に基づいて、各サスペンション装置の減衰力が制御される。
また、3輪モデルを用いることにより、バネ上部材の3方向の運動を考慮するのみでシステムに可制御性を与えることができる。したがって、各サスペンション装置を1自由度振動系とみなし、バネ下部材の運動方程式を考慮しなくても、要求減衰力を計算することができる。このため要求減衰力を計算するときの演算負荷を軽減できる。
また、前記3輪モデルは、前記2個の後輪側サスペンション装置が1個の後輪側仮想サスペンション装置に置き換えられた車両の運動を表す後輪近似3輪モデルであるとよい。あるいは、前記3輪モデルは、前記2個の前輪側サスペンション装置が1個の前輪側仮想サスペンション装置に置き換えられた車両の運動を表す前輪近似3輪モデルであるとよい。
3輪モデルとして後輪近似3輪モデルを用いるか、前輪近似3輪モデルを用いるかについては、様々な車両特性を基に決めることができる。一般に、3輪モデルを用いて各輪位置のサスペンション装置の要求減衰力を計算する場合、仮想サスペンション装置に置き換えられる側(近似される側)のサスペンション装置は、近似されていない側のサスペンション装置に比べてロール振動に対する抑制効果が低い。したがって、ロール振動に対する抑制効果がそれほど重要視されない側のサスペンション装置を仮想サスペンション装置に置き換えた3輪モデルを用いるのがよい。例えば、非駆動輪側に取付けられるサスペンション装置を仮想サスペンション装置に置き換えるのがよい。つまり、FR車であれば前輪近似3輪モデルを、FF車であれば後輪近似3輪モデルを用いるのがよい。また、乗り心地の優先度を考慮してモデルを決定してもよい。例えば、車両の前席側のロール振動を効果的に抑制したい場合には後輪近似3輪モデルを、後席側のロール振動を効果的に抑制したい場合には前輪近似3輪モデルを用いるのがよい。また、バネ上部材の上下方向の加速度(バネ上加速度)を検出するバネ上加速度センサが少ない側のサスペンション装置を仮想サスペンション装置に置き換えた3輪モデルにしてもよい。例えば、バネ上加速度センサがバネ上部材の前輪側に2個、後輪側に1個取付けられている場合には、後輪近似3輪モデルを用いるのがよい。
また、本発明の他の特徴は、前記要求減衰力計算手段が、前記2個の後輪側サスペンション装置が1個の後輪側仮想サスペンション装置に置き換えられた車両の運動を表す後輪近似3輪モデルから導出されるバネ上部材の上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前記後輪近似3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算し、計算した要求減衰力のうち前記後輪側仮想サスペンション装置についての要求減衰力を、前記2個の後輪側サスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算する第1要求減衰力計算手段と、前記2個の前輪側サスペンション装置が1個の前輪側仮想サスペンション装置に置き換えられた車両の運動を表す前輪近似3輪モデルから導出されるバネ上部材の上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前記前輪近似3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算し、計算した要求減衰力のうち前記前輪側仮想サスペンション装置についての要求減衰力を、前記2個の前輪側サスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算する第2要求減衰力計算手段と、を備え、前記減衰力制御手段は、前記第1要求減衰力計算手段および第2要求減衰力計算手段のいずれか一方により計算された要求減衰力に基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御することである。
上記発明によれば、減衰力制御手段は、後輪近似3輪モデルに基づいて計算された要求減衰力および前輪近似3輪モデルに基づいて計算された要求減衰力のいずれか一方の要求減衰力を用いてバネ上部材に取付けられた4個のサスペンション装置の減衰力を制御する。このため車両の走行状態、旋回状態や、ユーザーの好みに応じて、後輪近似3輪モデルを用いた減衰力制御と前輪近似3輪モデルを用いた減衰力制御とを選択することができる。
この場合、前記減衰力制御手段は、車両の旋回状態に基づいて、前記第1要求減衰力計算手段により計算された要求減衰力と前記第2要求減衰力計算手段により計算された要求減衰力のいずれか一方を選択する要求減衰力選択手段を備え、前記要求減衰力選択手段により選択された要求減衰力に基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御するものであるのがよい。
さらに、前記要求減衰力選択手段は、車両の旋回状態がアンダーステア状態であるときには、前記第1要求減衰力計算手段により計算された要求減衰力を選択し、車両の旋回状態がオーバーステア状態であるときには前記第2要求減衰力計算手段により計算された要求減衰力を選択するものであるのがよい。
また、前記減衰力制御装置は、車両旋回時に発生する実ヨーレートを検出するヨーレート検出センサと、車速および舵角に基づいて目標ヨーレートを計算する目標ヨーレート計算手段と、前記実ヨーレート検出センサにより検出された実ヨーレートと前記目標ヨーレート計算手段により計算された目標ヨーレートとの差を表すヨーレート偏差に基づいて、車両の旋回状態がアンダーステア状態であるかオーバーステア状態であるかを判定する旋回状態判定手段と、を更に備え、前記要求減衰力選択手段は、前記旋回状態判定手段により判定された車両の旋回状態に基づいて、要求減衰力を選択するものであるのがよい。
車両の旋回状態がアンダーステア状態であるときは、前輪側のロール振動を抑制することで、アンダーステア状態を矯正することができる。また、後輪近似3輪モデルを適用して各輪位置に取付けられているサスペンション装置の減衰力を制御した場合、左右前輪位置に取付けられている前輪側サスペンション装置が車両のロール振動を効果的に抑制するような減衰力を発生する。したがって、車両の旋回状態がアンダーステア状態であるときに後輪近似3輪モデルを適用してサスペンション装置の減衰力を制御することにより、アンダーステア状態が矯正される。これにより車両旋回時の安定性が向上する。
一方、車両の旋回状態がオーバーステア状態であるときは、後輪側のロール振動を抑制することで、オーバーステア状態を矯正することができる。また、前輪近似3輪モデルを適用して各輪位置に取付けられているサスペンション装置の減衰力を制御した場合、左右後輪位置に取付けられている後輪側サスペンション装置が車両のロール振動を効果的に抑制するような減衰力を発生する。したがって、車両の旋回状態がオーバーステア状態であるときに前輪近似3輪モデルを適用してサスペンション装置の減衰力を制御することにより、オーバーステア状態が矯正される。これにより車両旋回時の安定性が向上する。
また、本発明の更に他の特徴は、前記減衰力制御装置が、右前輪位置におけるバネ上部材の上下加速度を検出する右前輪側バネ上加速度センサと、左前輪位置におけるバネ上部材の上下加速度を検出する左前輪側バネ上加速度センサと、右後輪位置におけるバネ上部材の上下加速度を検出する右後輪側バネ上加速度センサと、左後輪位置におけるバネ上部材の上下加速度を検出する左後輪側バネ上加速度センサと、を備え、前記減衰力制御手段は、前記右前輪側バネ上加速度センサおよび前記左前輪側バネ上加速度センサのいずれか一方が異常であるときには、前記第2要求減衰力計算手段により計算された要求減衰力に基づいてバネ上部材の各輪位置に取付けられたサスペンション装置の減衰力を制御し、前記右後輪側バネ上加速度センサおよび前記左後輪側バネ上加速度センサのいずれか一方が異常であるときには、前記第1要求減衰力計算手段により計算された要求減衰力に基づいてバネ上部材の各輪位置に取付けられたサスペンション装置の減衰力を制御することにある。
上記発明によれば、バネ上加速度センサがバネ上部材の前後左右輪位置に取付けられており、且つ、一つのバネ上加速度センサが異常である場合、2個の前輪側サスペンション装置と2個の後輪側サスペンション装置のうち、異常であるセンサが設置されている側のサスペンション装置が1個の仮想サスペンション装置に置き換えられた3輪モデルが用いられる。これにより、センサの一つが故障した場合でも、減衰力の制御が継続される。
前記仮想サスペンション装置は、置き換えられる2個のサスペンション装置がバネ上部材に取付けられている位置の中間位置にてバネ上部材に取付けられるように、前記3輪モデルが設計されているのがよい。これによれば、仮想サスペンション装置に置き換えられる2個のサスペンション装置がバネ上部材に取付けられている位置の中間位置に仮想サスペンション装置が取付けられた3輪モデルに基づいて各輪位置のサスペンション装置の減衰力を制御することにより、左右の減衰力のアンバランスが修正される。また、仮想サスペンション装置について計算された要求減衰力を、置き換えられた2個のサスペンション装置に分配するにあたり、その分配比率は1:1であるのがよい。
(第1実施形態)
以下、本発明の第1実施形態について図面を用いて説明する。図1は本実施形態に係る車両のサスペンション制御装置1の全体を表す概略図である。このサスペンション制御装置1は、右前輪側サスペンション装置10FRと、左前輪側サスペンション装置10FLと、右後輪側サスペンション装置10RRと、左後輪側サスペンション装置10RLと、各サスペンション装置10FR,10FL,10RR,10RLの作動を制御する電気制御装置20を備える。電気制御装置20が本発明の減衰力制御装置に相当する。
以下、本発明の第1実施形態について図面を用いて説明する。図1は本実施形態に係る車両のサスペンション制御装置1の全体を表す概略図である。このサスペンション制御装置1は、右前輪側サスペンション装置10FRと、左前輪側サスペンション装置10FLと、右後輪側サスペンション装置10RRと、左後輪側サスペンション装置10RLと、各サスペンション装置10FR,10FL,10RR,10RLの作動を制御する電気制御装置20を備える。電気制御装置20が本発明の減衰力制御装置に相当する。
右前輪側サスペンション装置10FRは、車体を含むバネ上部材HAと右前輪WFRとの間に介装され、その一端側(上端側)にてバネ上部材HAの右前方側(右前輪位置)に連結され、他端側(下端側)にてバネ下部材LAを介して右前輪WFRに連結される。左前輪側サスペンション装置10FLは、バネ上部材HAと左前輪WFLとの間に介装され、一端側にてバネ上部材HAの左前方側(左前輪位置)に連結され、他端側にてバネ下部材LAを介して左前輪WFLに連結される。右後輪側サスペンション装置10RRは、バネ上部材HAと右後輪WRRとの間に介装され、一端側にてバネ上部材HAの右後方側(右後輪位置)に連結され、他端側にてバネ下部材LAを介して右後輪WRRに連結される。左後輪側サスペンション装置10RLは、バネ上部材HAと左後輪WRLとの間に介装され、一端側にてバネ上部材HAの左後方側(左後輪位置)に連結され、他端側にてバネ下部材LAを介して左後輪WRLに連結される。本明細書において、サスペンション装置10FR,10FL,10RR,10RLおよび車輪WFR,WFL,WRR,WRLを総称する場合には、これらを単にサスペンション装置10および車輪Wと記載する場合もある。
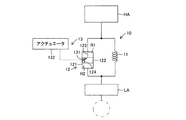
サスペンション装置10は、図1に示されるように、バネ11とダンパ(ショックアブソーバ)12とを備えている。バネ11およびダンパ12は、その一端(上端)にてバネ上部材HAに接続され、その他端にてバネ下部材LAに接続される。バネ11は、本実施形態においては金属製のコイルバネにより構成されるが、エアサスペンション装置などのような空気バネを用いてもよい。バネ下部材LAは、タイヤを含む車輪Wに連結されたナックルや、一端がナックルに連結されたロアアームなどにより構成され、サスペンション装置10を支持する。バネ上部材HAはサスペンション装置10により支持される部材であり、車体を含む。
ダンパ12は、シリンダ121と、ピストン122と、ピストンロッド123を備える。シリンダ121は、内部に粘性流体(例えば、オイルなど)が封入された筒状部材であり、その下端にてバネ下部材LA(詳しくは、ロアアーム)に連結される。ピストン122はシリンダ121内に配置される。このピストン122によりシリンダ121の内部が上室R1と下室R2とに区画される。ピストン122は、シリンダ121内を軸方向に移動可能である。ピストンロッド123は、その下端にてピストン122に連結され、その上端にてバネ上部材HAに連結される。また、ピストン122には、上室R1と下室R2とを連通する連通路が形成されている。
このように構成されたダンパ12においては、車輪Wが路面凹凸を乗り越えるなどによりバネ上部材HAが路面に対して相対変位した場合、バネ上部材HA側に連結されたピストン122が、バネ下部材LA側(路面側)に連結されたシリンダ121内を相対変位する。この相対変位に伴いピストン122に形成された連通路内を粘性流体が流通することにより粘性抵抗が発生する。この粘性抵抗により、路面に対するバネ上部材HAの相対変位、すなわちバネ上部材HAの振動が減衰する。
バネ11は、図に示されるように、その下端にてシリンダ121の外周に取付けられたリテーナに連結され、その上端にてバネ上部材HAに連結される。このバネ11は、路面に対するバネ上部材HAの相対変位に伴う弾性力を発生する。
図2は、本実施形態に係るサスペンション装置10を模式的に示した図である。図2に示されるように、サスペンション装置10には、可変絞り機構13が取付けられている。可変絞り機構13は、バルブ131およびアクチュエータ132を有する。バルブ131は、ピストン122に形成された連通路124に設けられていて、公知の絞り機構によって、連通路124の少なくとも一部の流路断面積の大きさ、すなわちバルブ開度OPを変化させる。アクチュエータ132は例えばステッピングモータなどにより構成することができる。図1には、各サスペンション装置10FR,10FL,10RR,10RLに取付けられたアクチュエータ132FR,132FL,132RR,132RLが示されている。これらのアクチュエータは、各サスペンション装置10FR,10FL,10RR,10RLのダンパ12の上部に配置され、バネ上部材HAに固定されている。また、アクチュエータ132は、例えばピストンロッド123の内部に配されるコントロールロッドなどによってバルブ131に連結される。したがって、アクチュエータ132が作動すると、それに伴いバルブ131が作動し、バルブ開度OPが変更される。バルブ開度OPの変更により、連通路124の流路断面積が変更される。その結果、連通路124内を粘性流体が流通するときの抵抗力も変更される。抵抗力の変更により、ダンパ12により発生される減衰力の大きさを表す減衰係数(減衰力特性)が変更される。
また、図1に示されるように、右前輪側サスペンション装置10FRと左前輪側サスペンション装置10FLは、前輪側スタビライザ14によって連結されている。また、右後輪側サスペンション装置10RRと左後輪側サスペンション装置10RLは、後輪側スタビライザ15によって連結されている。前輪側スタビライザ14および後輪側スタビライザ15は、それぞれ、車両の左右方向に沿って延在するスタビライザバー14a,15aと、これらスタビライザバー14a,15aの両端から連続して延びている一対のスタビライザアーム14b,15bを有する。スタビライザバー14a,15aは、その軸線周りに回転自在にバネ上部材HA(具体的には車体)に支持される。スタビライザアーム14b,15bは、スタビライザバー14a,15aから車両前方に屈曲し、その先端にてバネ下部材LA(具体的にはロアアーム)に接続される。このように設けられる前輪側スタビライザ14および後輪側スタビライザ15は、例えば車両旋回時に発生するロールモーメントを打ち消すアンチロールモーメントを発生し、このアンチロールモーメントにより車両に作用するロールモーメントを低減する機能を有する。
図3は、電気制御装置20の接続構成を概略的に示す図である。図3に示されるように、電気制御装置20は、サスペンション電子制御ユニット(以下、サスペンションECU)21と、バネ上加速度センサ221FR,221FL,221RR,221RLと、路面上下加速度センサ222FR,222FL,222RR,222RLと、ストロークセンサ223FR,223FL,223RR,223RLと、ロール角加速度センサ224と、ピッチ角加速度センサ225と、車速センサ226と、舵角センサ227と、ヨーレートセンサ228と、駆動回路23FR,23FL,23RR,23RLを備える。
バネ上加速度センサ221FR,221FL,221RR,221RLは、バネ上部材HAの各輪位置(右前輪位置,左前輪位置,右後輪位置,左後輪位置)に取付けられており、その位置におけるバネ上部材HAの上下方向に沿った加速度である右前輪側バネ上加速度xb_fr",左前輪側バネ上加速度xb_fl",右後輪側バネ上加速度xb_rr",左後輪側バネ上加速度xb_rl"をそれぞれ検出する。路面上下加速度センサ222FR,222FL,222RR,222RLは、各車輪Wに連結したバネ下部材LAに取付けられており、各バネ下部材LAの上下方向に沿った加速度を計測することにより、各バネ下部材LAが連結されている車輪Wの接地路面の上下方向に沿った加速度である右前輪側路面加速度xr_fr",左前輪側路面加速度xr_fl",右後輪側路面加速度xr_rr",左後輪側路面加速度xr_rl"をそれぞれ検出する。ストロークセンサ223FR,223FL,223RR,223RLは、各サスペンション装置10に取付けられており、サスペンション装置10のストローク変位量、すなわちダンパ12のシリンダ121に対するピストン122の相対変位量を計測することにより、路面に対するバネ上部材HAの変位量である右前輪側バネ上−路面間相対変位量(xr_fr-xb_fr)、左前輪側バネ上−路面間相対変位量(xr_fl-xb_fl)、右後輪側バネ上−路面間相対変位量(xr_rr-xb_rr)、左後輪側バネ上−路面間相対変位量(xr_rl-xb_rl)をそれぞれ検出する。右前輪側バネ上−路面間相対変位量(xr_fr-xb_fr)は、右前輪位置におけるバネ上部材HAの上下方向に沿った基準位置からの変位量である右前輪側バネ上変位量xb_frと、右前輪WFRの接地路面の上下方向に沿った基準位置からの変位量である右前輪側路面変位量xr_frとの差により表される。同様に、左前輪側バネ上−路面間相対変位量(xr_fl-xb_fl)は左前輪側バネ上変位量xb_flと左前輪側路面変位量xr_flとの差、右後輪側バネ上−路面間相対変位量(xr_rr-xb_rr)は右後輪側バネ上変位量xb_rrと右後輪側路面変位量xr_rrとの差、左後輪側バネ上−路面間相対変位量(xr_rl-xb_rl)は左後輪側バネ上変位量xb_rlと左後輪側路面変位量xr_rlとの差により、それぞれ表される。
ロール角加速度センサ224はバネ上部材HAに取付けられており、バネ上部材HAのロール方向(前後軸周り方向)の角度変位を表すロール角θrの角加速度(ロール角加速度)θr"を検出する。ピッチ角加速度センサ225もバネ上部材HAに取付けられており、バネ上部材HAの左右軸周り方向の角度変位を表すピッチ角θpの角加速度(ピッチ角加速度)θp"を検出する。車速センサ226は車輪Wの近傍に取付けられており、車速パルスをカウントすることにより車速Vを検出する。舵角センサ227は操舵ハンドルに連結したステアリングシャフトに取付けられており、ステアリングシャフトの回転角を計測することにより、転舵輪(一般的には前輪)の転舵角φを検出する。ヨーレートセンサ228はバネ上部材HAに取付けられており、バネ上部材HAの上下軸周りの角速度を表す実ヨーレートYRを検出する。
サスペンションECU21は、CPU,ROM,RAMなどを主要構成部品とするマイクロコンピュータである。サスペンションECU21の入力側には、上述した各種センサが接続されていて、これらのセンサからの検出信号が入力されるようになっている。このサスペンションECU21は、各種センサからの検出信号に基づいて、後述するプログラムを含む各種プログラムを実行することにより、アクチュエータ132の駆動を制御するための駆動信号を出力する。これによりサスペンション装置10の各ダンパ12により発生される減衰力が制御される。
駆動回路23FR,23FL,23RR,23RLは、サスペンションECU21の出力側に接続されている。駆動回路23FR,23FL,23RR,23RLは、それぞれ各サスペンション装置10FR,10FL,10RR,10RLに対応するアクチュエータ132FR,132FL,132RR,132RLに接続されており、サスペンションECU21から出力された駆動信号に基づいて、アクチュエータ132FR,132FL,132RR,132RLに駆動電流を出力する
図4は、サスペンションECU21を機能毎に分けて表した図である。図4に示されるように、サスペンションECU21は、後輪近似制御部211と、前輪近似制御部212と、旋回状態判定部213と、統合制御部214を有する。後輪近似制御部211は、後述する後輪近似3輪モデルに基づいて、各サスペンション装置10FR,10FL,10RR,10RLのダンパにより発生されるべき制御目標の減衰力である第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rlを計算し、計算したこれらの要求減衰力を出力する。
前輪近似制御部212は、後述する前輪近似3輪モデルに基づいて、各サスペンション装置10FR,10FL,10RR,10RLのダンパにより発生されるべき制御目標の減衰力である第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rlを計算し、計算したこれらの要求減衰力を出力する。
旋回状態判定部213は、後述する旋回状態判定プログラムを実行することにより、現在の車両の旋回状態、具体的には現在の車両の旋回状態がアンダーステア状態であるかオーバーステア状態であるかを判定し、その判定結果を表す旋回状態フラグRSを出力する。
統合制御部214は、後輪近似制御部211から第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rlを、前輪近似制御部212から第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rlを、旋回状態判定部213から旋回状態フラグRSを入力する。また、入力した値に基づいて、右前輪側サスペンション装置10FRのダンパが発生すべき減衰力である右前輪側要求減衰力Freq_fr、左前輪側サスペンション装置10FLのダンパが発生すべき減衰力である左前輪側要求減衰力Freq_fl、右後輪側サスペンション装置10RRのダンパが発生すべき減衰力である右前輪側要求減衰力Freq_rr、左後輪側サスペンション装置10RLのダンパが発生すべき減衰力である左後輪側要求減衰力Freq_rlを、最終的に決定(選択)する。そして、決定した右前輪側要求減衰力Freq_frに対応する駆動信号を駆動回路23FRに、決定した左前輪側要求減衰力Freq_flに対応する駆動信号を駆動回路23FLに、決定した右後輪側要求減衰力Freq_rlに対応する駆動信号を駆動回路23RRに、決定した左後輪側要求減衰力Freq_rlに対応する駆動信号を駆動回路23RLに、それぞれ出力する。
上記構成のサスペンション制御装置1において、バネ上加速度センサ221FR,221FL,221RR,221RLの検出値から得られる各輪位置におけるバネ上加速度のいずれか一つが所定の閾値を越えた場合、サスペンションECU21の後輪近似制御部211は後輪近似制御プログラムを、前輪近似制御部212は前輪近似制御プログラムを、旋回状態判定部213は旋回状態判定プログラムを、統合制御部214は統合制御プログラムを、それぞれ実行する。
図5は、後輪近似制御プログラムの流れを示すフローチャートである。後輪近似制御部211は、この後輪近似制御プログラムを図5のステップ(以下、ステップ番号をSと略記する)100にて開始する。次いで、S102にて、バネ上加速度センサ221FR,221FL,221RR,221RLから右前輪側バネ上加速度xb_fr",左前輪側バネ上加速度xb_fl",右後輪側バネ上加速度xb_rr",左後輪側バネ上加速度xb_rl"を、路面上下加速度センサ222FR,222FL,222RR,222RLから右前輪側路面加速度xr_fr",左前輪側路面加速度xr_fl",右後輪側路面加速度xr_rr",左後輪側路面加速度xr_rl"を、ストロークセンサ223FR,223FL,223RR,223RLから右前輪側バネ上−路面間相対変位量(xr_fr-xb_fr),左前輪側バネ上−路面間相対変位量(xr_fl-xb_fl),右後輪側バネ上−路面間相対変位量(xr_rr-xb_rr),左後輪側バネ上−路面間相対変位量(xr_rl-xb_rl)を、ロール角加速度センサ224からロール角加速度θr"を、ピッチ角加速度センサ225からピッチ角加速度θp"を、それぞれ入力する。
次に、S104にて、右前輪側バネ上加速度xb_fr"を時間積分することにより、右前輪位置におけるバネ上部材HAの上下方向に沿った速度である右前輪側バネ上速度xb_fr'を、左前輪側バネ上加速度xb_fl"を時間積分することにより左前輪側バネ上速度xb_fl'を計算する。また、右後輪側バネ上加速度xb_rr"を時間積分して右後輪側バネ上速度xb_rr'を、左後輪側バネ上加速度xb_rl"を時間積分して左後輪側バネ上速度xb_rl'を計算し、さらに、これらの速度xb_rr'およびxb_rl'を足して2で割ることにより、後方中心輪側バネ上速度xb_R'を計算する。
また、右前輪側バネ上速度xb_fr'をさらに時間積分することにより、右前輪位置におけるバネ上部材HAの上下方向に沿った基準位置からの変位量である右前輪側バネ上変位量xb_frを、左前輪側バネ上速度xb_fl'をさらに時間積分することにより左前輪側バネ上変位量xb_flを計算する。また、後方中心輪側バネ上速度xb_R'をさらに時間積分することにより後方中心輪側バネ上変位量xb_Rを計算する。
続いて、S106にて、右前輪側路面加速度xr_fr"を時間積分することにより、右前輪WFRの接地路面の上下方向に沿った変位速度である右前輪側路面速度xr_fr'を、左前輪側路面加速度xr_fl"を時間積分することにより左前輪側路面速度xr_fl'を計算する。また、右後輪側路面加速度xr_rr"を時間積分して右後輪側路面速度xr_rr'を、左後輪側路面加速度xr_rl"を時間積分して左後輪側路面速度xr_rl'を計算し、さらに、これらの速度xr_rr'およびxr_rl'を足して2で割ることにより、後方中心輪側路面速度xr_R'を計算する。
また、右前輪側路面速度xr_fr'をさらに時間積分することにより、右前輪WFRの接地路面の上下方向に沿った基準位置からの変位量である右前輪側路面変位量xr_frを、左前輪側路面速度xr_fl'をさらに時間積分することにより左前輪側路面変位量xb_flを計算する。また、後方中心輪側路面速度xr_R'をさらに時間積分することにより後方中心輪側路面変位量xr_Rを計算する。
次いで、S108にて、右前輪側バネ上−路面間相対変位量(xr_fr-xb_fr)を時間微分することにより、右前輪側バネ上速度xb_fr'と右前輪側路面速度xr_fr'との差により表される右前輪側バネ上−路面間相対速度(xr_fr'-xb_fr')を、左前輪側バネ上−路面間相対変位量(xr_fl-xb_fl)を時間微分することにより左前輪側バネ上−路面間相対速度(xr_fl'-xb_fl')を計算する。また、右後輪側バネ上−路面間相対変位量(xr_rr-xb_rr)を時間微分して右後輪側バネ上−路面間相対速度(xr_rr'-xb_rr')を、左後輪側バネ上−路面間相対変位量(xr_rl-xb_rl)を時間微分して左後輪側バネ上−路面間相対速度(xr_rl'-xb_rl')を計算し、さらに、これらの速度(xr_rr'-xb_rr')および(xr_rl'-xb_rl')を足して2で割ることにより、後方中心輪側バネ上−路面間相対速度(xr_R'-xb_R')を計算する。この後方中心輪側バネ上−路面間相対速度(xr_R'-xb_R')は、後方中心輪側バネ上速度xb_R'と後方中心輪側路面速度xr_R'との差である。
次に、後輪近似制御部211は、S110にて、非線形H∞制御理論を適用し、右前輪側可変減衰係数Cv_fr,左前輪側可変減衰係数Cv_fl,後方中心輪側可変減衰係数Cv_Rを計算する。この計算をする際に、図9に示される後輪近似3輪モデルが力学的な運動モデルとして用いられる。この後輪近似3輪モデルは、右後輪側サスペンション装置10RRおよび左後輪側サスペンション装置10RLが1個の後方中心輪側サスペンション装置10Rに置き換えられ、バネ上部材HAが、前輪側に位置する2個のサスペンション装置10FR,10FLおよび、後輪中央部に位置する1個のサスペンション装置10Rにより支えられている車両の運動を表す車両モデルである。後方中心輪側サスペンション装置10Rは、バネ上部材HAの右後輪位置と左後輪位置を結ぶ後輪軸の中心位置にてバネ上部材HAに仮想的に取付けられる。なお、S104にて計算された後方中心輪側バネ上速度xb_R'および後方中心輪側バネ上変位量xb_Rは、後方中心輪側サスペンション装置10Rがバネ上部材HAに取付けられている位置(後方中心輪位置)における、バネ上部材HAの上下方向に沿った速度および変位量である。また、S106にて計算された後方中心輪側路面速度xr_R'および後方中心輪側路面変位量xr_Rは、後方中心輪側サスペンション装置10Rに連結すべき車輪(後方中心輪)の接地路面の上下方向に沿った速度および変位量である。後方中心輪側サスペンション装置10Rが本発明の仮想サスペンション装置および後輪側仮想サスペンション装置に相当する。
また、図9の後輪近似3輪モデルにおいて、右前輪側サスペンション装置10FRのバネのバネ定数がKs_frにより、左前輪側サスペンション装置10FLのバネのバネ定数がKs_flにより、後方中心輪側サスペンション装置10Rのバネのバネ定数がKs_Rにより表される。バネ定数Ks_Rは、例えば、右後輪側サスペンション装置10RRのバネのバネ定数Ks_rrと左後輪側サスペンション装置10RLのバネのバネ定数Ks_rlの平均により表すことができる。
また、右前輪側サスペンション装置10FRのダンパの減衰係数が、右前輪側線形減衰係数Cs_frと右前輪側可変減衰係数Cv_frとの和(Cs_fr+Cv_fr)により表される。右前輪側線形減衰係数Cs_frは変動しない減衰係数を表し、右前輪側可変減衰係数Cv_frは変動する減衰係数を表す。また、左前輪側サスペンション装置10FLのダンパの減衰係数が、左前輪側線形減衰係数Cs_flと左前輪側可変減衰係数Cv_flの和(Cs_fl+Cv_fl)により表される。左前輪側線形減衰係数Cs_flは変動しない減衰係数を表し、左前輪側可変減衰係数Cv_flは変動する減衰係数を表す。また、後方中心輪側サスペンション装置10Rのダンパの減衰係数が、後方中心輪側線形減衰係数Cs_Rと後方中心輪側可変減衰係数Cv_Rとの和(Cs_R+Cv_R)により表される。後方中心輪側線形減衰係数Cs_Rは変動しない減衰係数を表し、後方中心輪側可変減衰係数Cv_Rは変動する減衰係数を表す。各線形減衰係数Cs_fr,Cs_fl,Cs_Rは予め定められる。後方中心輪側線形減衰係数Cs_Rは、例えば右後輪側サスペンション装置10RRのダンパについて予め定められる右後輪側線形減衰係数Cs_rrと左後輪側サスペンション装置10RLのダンパについて予め定められる左後輪側線形減衰係数Cs_rlの平均により表すことができる。また、前輪側スタビライザ14により発生される捩り力の係数である前輪側捩り弾性係数がKstb_Fにより表される。
そして、S110にて、後輪近似制御部211は、後輪近似3輪モデルから導き出された運動方程式に基づいて設計された制御システムに非線形H∞制御理論を適用し、モデルに表されている3個のサスペンション装置10FR,10FL,10Rの各可変減衰係数(右前輪側可変減衰係数Cv_fr,左前輪側可変減衰係数Cv_fl,後方中心輪側可変減衰係数Cv_R)を計算する。
後輪近似3輪モデルから導き出されるバネ上部材HAの運動方程式は、下記式(eq.1)〜式(eq.3)のように表される。
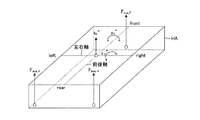
式(eq.1)は、バネ上部材HAの上下方向の運動方程式(ヒーブ運動方程式)、式(eq.2)は、バネ上部材HAのローリング方向(前後軸周りの回転方向)の運動方程式(ロール運動方程式)、式(eq.3)は、バネ上部材HAのピッチング方向(左右軸周りの回転方向)の運動方程式(ピッチ運動方程式)である。上式において、Mbはバネ上部材HAの質量、xh"はバネ上部材HAの重心位置における上下方向に沿った加速度(ヒーブ加速度)である。ヒーブ加速度xh"は、各バネ上加速度センサ221FR,221FL,221RR,221RLにより検出されるバネ上加速度から求めることができる。Fsus_frはバネ上部材HAの右前輪位置にてバネ上部材HAに上下方向に作用する力(右前輪側上下力)、Fsus_flはバネ上部材HAの左前輪位置にてバネ上部材HAに上下方向に作用する力(左前輪側上下力)、Fsus_Rはバネ上部材HAの後方中心輪位置にてバネ上部材HAに上下方向に作用する力(後方中心輪側上下力)である。図10は、式(eq.1)〜(eq.3)に表される上下力の作用位置や加速度を表した図である。
また、上式において、Irはバネ上部材HAのローリング方向の慣性モーメント(ロールイナーシャ)、Ipはバネ上部材HAのピッチング方向の慣性モーメント(ピッチイナーシャ)、Tfは前輪側のトレッドである。Lfは、バネ上部材HAの重心位置から右前輪位置と左前輪位置とを結ぶ前輪軸までの前後方向距離である。Lrは、バネ上部材HAの重心位置から後方中心輪位置までの前後方向距離である。
右前輪側上下力Fsus_frは下記式(eq.4)により、左前輪側上下力Fsus_flは下記式(eq.5)により、後方中心輪側上下力Fsus_Rは下記式(eq.6)により表される。
上記式(eq.4)〜(eq.6)において、Fsp_frは右前輪側サスペンション装置10FRのバネにより発生される弾性力(右前輪側弾性力)、Fsp_flは左前輪側サスペンション装置10FLのバネにより発生される弾性力(左前輪側弾性力)、Fsp_Rは後方中心輪側サスペンション装置10Rのバネにより発生される弾性力(後方中心輪側弾性力)である。FCs_frは右前輪側サスペンション装置10FRのダンパにより発生される減衰力のうち、右前輪側線形減衰係数Cs_frにより表される減衰力(右前輪側線形減衰力)、FCv_frは右前輪側可変減衰係数Cv_frにより表される減衰力(右前輪側可変減衰力)である。FCs_flは左前輪側サスペンション装置10FLのダンパにより発生される減衰力のうち、左前輪側線形減衰係数Cs_flにより表される減衰力(左前輪側線形減衰力)、FCv_flは左前輪側可変減衰係数Cv_flにより表される減衰力(左前輪側可変減衰力)である。FCs_Rは後方中心輪側サスペンション装置10Rのダンパにより発生される減衰力のうち、後方中心輪側線形減衰係数Cs_Rにより表される減衰力(後方中心輪側線形減衰力)、FCv_Rは後方中心輪側可変減衰係数Cv_Rにより表される減衰力(後方中心輪側可変減衰力)である。Fstb_Fは、前輪側スタビライザ14により発生される捩り弾性力(前輪側捩り弾性力)である。
右前輪側弾性力Fsp_fr、左前輪側弾性力Fsp_flおよび後方中心輪側弾性力Fsp_Rは、下記式(eq.7)〜(eq.9)により表される。
右前輪側線形減衰力FCs_fr、左前輪側線形減衰力FCs_flおよび後方中心輪側線形減衰力FCs_Rは、下記式(eq.10)〜(eq.12)により表される。
右前輪側可変減衰力FCv_fr、左前輪側可変減衰力FCv_flおよび後方中心輪側可変減衰力FCv_Rは、下記式(eq.13)〜(eq.15)により表される。
前輪側捩り弾性力Fstb_Fは、下記式(eq.16)により表される。
また、バネ上部材HAの重心位置における上下変位量を表すヒーブ変位量xh、ロール角θrおよびピッチ角θpは、下記式(eq.17)に示されるように、モード変換行列を用いて、右前輪側バネ上変位量xb_fr、左前輪側バネ上変位量xb_fl、後方中心輪位置におけるバネ上変位量(前方中心輪側バネ上変位量)xb_Rに変換することができる。
以上の関係式から、後輪近似3輪モデルの状態空間表現が、下記式(eq.18)のように表される。
上記式(eq.18)において、状態量xp,評価出力zp,外乱wは、例えば下記式(eq.19)のように表される。
また、制御入力uは、下記式(eq.20)に示されるように、右前輪側可変減衰係数Cv_fr、左前輪側可変減衰係数Cv_flおよび後方中心輪側可変減衰係数Cv_Rである。
また、Ap,BP1,Bp2(xp),Cp1,Dp12(xp)は係数行列である。これらの係数行列は、状態量xp,評価出力zp,外乱wが上記(eq.19)のように設定され、且つ制御入力uが上記式(eq.20)のように設定されたときに、式(eq.1)〜(eq.3)の運動方程式を満たすように定められる。
表2に、式(eq.18)に示された状態空間表現中の操作量(制御入力u)の個数、状態量の個数、状態空間表現の基礎となる後輪近似3輪モデルの自由度を示す。
表2に示されるように、後輪近似3輪モデルにより表されるバネ上部材の自由度は3自由度(上下運動、ロール運動、ピッチ運動)である。また、本モデルにおいてバネ下部材の運動は考慮しない。つまりバネ下部材が路面と同じように上下変位する。このためサスペンション装置の自由度は1自由度(バネ上部材の上下運動)である。したがって、このモデルの自由度は3自由度である。また、システムの外乱は、式(eq.19)に示されるように3輪(右前輪、左前輪、後方中心輪)の路面変位量xr_fr,xr_fl,xr_Rである。この外乱をバネ上部材HAの変位にモード変換すると、外乱は、バネ上部材HAの上下変位、ロール変位、ピッチ変位により表される。したがって、外乱によるバネ上部材HAの自由度は3自由度である。モデルの自由度と外乱によるバネ上部材HAの自由度が等しいため、この制御システムは可制御である。
図11は、上記式(eq.18)に示される状態空間表現に基づいて設計された一般化プラント(制御システム)のブロック線図である。図に示されるように、評価出力zpと制御入力uに周波数重みWs(s),Wu(s)がそれぞれ作用している。なお、この出力にさらに非線形重みが作用するように、システムを設計してもよい。
周波数重みWs(s)の状態空間表現は、周波数重みWs(s)の状態量xw、出力zwおよび各定数行列Aw,Bw,Cw,Dwにより、下記式(eq.21)のように表される。また、周波数重みWu(s)の状態空間表現は、周波数重みWu(s)の状態量xu、出力zuおよび各定数行列Au,Bu,Cu,Duにより、下記式(eq.22)のように表される。
上式において、xw'は状態量xwの微分を表し、xu'は状態量xuの微分を表す。
一般化プラントの状態空間表現は、式(eq.18),(eq.21),(eq.22)を用いることにより、下記式(eq.23)のように表すことができる。
式(eq.23)は、双線形システムである。したがって、このシステムの制御則u=k(x)は、ハミルトンヤコビ偏微分不等式を解くかわりに、近似的に下記式(eq.24)に示されるリカッチ不等式を解くことにより、得られる。
上記式(eq.24)により表されるリカッチ不等式を満たす正定対称行列Pが存在する場合、図11に示される一般化プラントの閉ループシステムが内部安定となり、且つ、外乱wに対するロバスト性を表すL2ゲインが正定数γ以下となる。このとき制御入力u(=k(x))は、例えば下記式(eq.25)のように表される。
したがって、S110において、後輪近似制御部211は、式(eq.25)に基づいて制御入力uを求めることにより、各可変減衰係数Cv_fr,Cv_fl,Cv_Rを得ることができる。
可変減衰係数を計算した後、後輪近似制御部211は図5のS112に進み、第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1後方中心輪側要求減衰力F1req_Rを計算する。これらの要求減衰力は、後輪近似3輪モデルに表される各サスペンション装置のダンパにより発生されるべき制御目標の減衰力(要求減衰力)である。第1右前輪側要求減衰力F1req_frは、後輪近似3輪モデルに表される右前輪側サスペンション装置10FRについての要求減衰力であり、右前輪側線形減衰係数Cs_frと右前輪側可変減衰係数Cv_frとの和(Cs_fr+Cv_fr)に右前輪側バネ上−路面間相対速度(xr_fr'-xb_fr')を乗じることにより計算される。第1左前輪側要求減衰力F1req_flは、後輪近似3輪モデルに表される左前輪側サスペンション装置10FLについての要求減衰力であり、左前輪側線形減衰係数Cs_flと左前輪側可変減衰係数Cv_flとの和(Cs_fl+Cv_fl)に左前輪側バネ上−路面間相対速度(xr_fl'-xb_fl')を乗じることにより計算される。第1後方中心輪側要求減衰力F1req_Rは、後輪近似3輪モデルに表される後方中心輪側サスペンション装置10Rについての要求減衰力であり、後方中心輪側線形減衰係数Cs_Rと後方中心輪側可変減衰係数Cv_Rとの和(Cs_R+Cv_R)に後方中心輪側バネ上−路面間相対速度(xr_R'-xb_R')を乗じることにより計算される。S112にて後輪近似3輪モデルに表される3個のサスペンション装置10FR,10FL,10Rについての要求減衰力を計算する処理が、本発明のモデル要求減衰力計算手段に相当する。
次に、後輪近似制御部211は、S114にて、第1後方中心輪側要求減衰力F1req_Rを第1右後輪側要求減衰力F1req_rrおよび第1左後輪側要求減衰力F1req_rlに分配する。具体的には、第1後方中心輪側要求減衰力F1req_Rを2で割ることにより、第1右後輪側要求減衰力F1req_rrおよび第1左後輪側要求減衰力F1req_rlを計算する。第1右後輪側要求減衰力F1req_rrは、後輪近似3輪モデルに基づいて計算される右後輪側サスペンション装置10RRについての要求減衰力であり、第1左後輪側要求減衰力F1req_rlは左後輪側サスペンション装置10RLについての要求減衰力である。本実施形態のように後方中心輪側サスペンション装置10Rの取付位置が右後輪側サスペンション装置10RRの取付位置と左後輪側サスペンション装置10RLの取付位置の中間に位置している場合、第1右後輪側要求減衰力F1req_rrの大きさと第1左後輪側要求減衰力F1req_rlの大きさが等しくなるように、つまり分配比率が1:1になるように、第1後方中心輪側要求減衰力F1req_Rが第1右後輪側要求減衰力F1req_rrと第1左後輪側要求減衰力F1req_rlに分配される。このS114にて行われる処理が、本発明の要求減衰力分配手段に相当する。
S114にて第1右後輪側要求減衰力F1req_rrおよび第1左後輪側要求減衰力F1req_rlを計算した後、後輪近似制御部211はS116に進み、第1右前輪側要求減衰力F1req_rl,第1左前輪側要求減衰力F1req_rl,第1右後輪側要求減衰力F1req_rl,第1左後輪側要求減衰力F1req_rlを出力する。その後、S118に進んでこのプログラムを終了する。以上の説明からわかるように、本実施形態の後輪近似制御部211は、後輪近似3輪モデルから導出されるバネ上部材HAの上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、後輪近似3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算する。また、計算した要求減衰力のうち後方中心輪側サスペンション装置10Rについての要求減衰力(第1後方中心輪側要求減衰力F1req_R)を、この後方中心輪側サスペンション装置10Rに置き換えられた右後輪側サスペンション装置10RRおよび左後輪側サスペンション装置10RLについての要求減衰力(第1右後輪側要求減衰力F1req_rrおよび第1左後輪側要求減衰力F1req_rl)に分配する。これにより、バネ上部材HAの各輪位置に取付けられた4個のサスペンション装置についての要求減衰力が計算される。この後輪近似制御部211が、本発明の第1要求減衰力計算手段に相当する。
図6は、前輪近似制御プログラムの流れを示すフローチャートである。前輪近似制御部212は、この前輪近似制御プログラムを図6のS200にて開始する。次いで、S202にて、バネ上加速度センサ221FR,221FL,221RR,221RLから右前輪側バネ上加速度xb_fr",左前輪側バネ上加速度xb_fl",右後輪側バネ上加速度xb_rr",左後輪側バネ上加速度xb_rl"を、路面上下加速度センサ222FR,222FL,222RR,222RLから右前輪側路面加速度xr_fr",左前輪側路面加速度xr_fl",右後輪側路面加速度xr_rr",左後輪側路面加速度xr_rl"を、ストロークセンサ223FR,223FL,223RR,223RLから右前輪側バネ上−路面間相対変位量(xr_fr-xb_fr),左前輪側バネ上−路面間相対変位量(xr_fl-xb_fl),右後輪側バネ上−路面間相対変位量(xr_rr-xb_rr),左後輪側バネ上−路面間相対変位量(xr_rl-xb_rl)を、ロール角加速度センサ224からロール角加速度θr"を、ピッチ角加速度センサ225からピッチ角加速度θp"を、それぞれ入力する。
次に、S204にて、右前輪側バネ上加速度xb_fr"を時間積分することにより右前輪側バネ上速度xb_fr'を、左前輪側バネ上加速度xb_fl"を時間積分することにより左前輪側バネ上速度xb_fl'を計算し、さらにこれらの速度xb_fr'およびxb_fl'を足して2で割ることにより、前輪中心輪側バネ上速度xb_F'を計算する。また、右後輪側バネ上加速度xb_rr"を時間積分して右後輪側バネ上速度xb_rr'を、左後輪側バネ上加速度xb_rl"を時間積分して左後輪側バネ上速度xb_rl'を計算する。
また、右後側バネ上速度xb_rr'をさらに時間積分することにより、右後輪位置におけるバネ上部材HAの上下方向に沿った基準位置からの変位量である右後輪側バネ上変位量xb_rrを、左後輪側バネ上速度xb_rl'をさらに時間積分することにより左後輪側バネ上変位量xb_rlを計算する。また、前方中心輪側バネ上速度xb_F'をさらに時間積分することにより前方中心輪側バネ上変位量xb_Fを計算する。
続いて、S206にて、右前輪側路面加速度xr_fr"を時間積分することにより右前輪側路面速度xr_fr'を、左前輪側路面加速度xr_fl"を時間積分することにより左前輪側路面速度xr_fl'を計算し、さらにこれらの速度xr_fr'およびxr_fl"を足して2で割ることにより、前方中心輪側路面速度xr_F'を計算する。また、右後輪側路面加速度xr_rr"を時間積分して右後輪側路面速度xr_rr'を、左後輪側路面加速度xr_rl"を時間積分して左後輪側路面速度xr_rl'を計算する。
また、右後輪側路面速度xr_rr'をさらに時間積分することにより、右後輪WRRの接地路面の上下方向に沿った基準位置からの変位量である右後輪側路面変位量xr_rrを、左後輪側路面速度xr_rl'をさらに時間積分することにより左後輪側路面変位量xr_rlを計算する。また、前方中心輪側路面速度xr_F'をさらに時間積分することにより前方中心輪側路面変位量xr_Fを計算する。
次いで、S208にて、右前輪側バネ上−路面間相対変位量(xr_fr-xb_fr)を時間微分することにより右前輪側バネ上−路面間相対速度(xr_fr'-xb_fr')を、左前輪側バネ上−路面間相対変位量(xr_fl-xb_fl)を時間微分することにより左前輪側バネ上−路面間相対速度(xr_fl'-xb_fl')を計算し、さらに、これらの速度(xr_fr'-xb_fr')および(xr_fl'-xb_fl')を足して2で割ることにより、前方中心輪側バネ上−路面間相対速度(xr_F'-xb_F')を計算する。この前方中心輪側バネ上−路面間相対速度(xr_F'-xb_F')は、前方中心輪側バネ上速度xb_F'と前方中心輪側路面速度xr_F'との差である。また、右後輪側バネ上−路面間相対変位量(xr_rr-xb_rr)を時間微分して右後輪側バネ上−路面間相対速度(xr_rr'-xb_rr')を、左後輪側バネ上−路面間相対変位量(xr_rl-xb_rl)を時間微分して左後輪側バネ上−路面間相対速度(xr_rl'-xb_rl')を計算する。
次に、前輪近似制御部212は、S210にて、非線形H∞制御理論を適用し、前方中心輪側可変減衰係数Cv_F,右後輪側可変減衰係数Cv_rr,左後輪側可変減衰係数Cv_rlを計算する。この計算をする際に、図12に示される前輪近似3輪モデルが力学的な運動モデルとして用いられる。この前輪近似3輪モデルは、右前輪側サスペンション装置10FRおよび左前輪側サスペンション装置10FLが1個の前方中心輪側サスペンション装置10Fに置き換えられ、バネ上部材HAが、前輪中央部に位置する1個のサスペンション装置10Fおよび、後輪側に位置する2個のサスペンション装置10RR,10RLにより支えられている車両の運動を表す車両モデルである。前方中心輪側サスペンション装置10Fは、バネ上部材HAの右前輪位置と左前輪位置を結ぶ前輪軸の中心位置にてバネ上部材HAに仮想的に取付けられる。なお、S204にて計算された前方中心輪側バネ上速度xb_F'および前方中心輪側バネ上変位量xb_Fは、前方中心輪側サスペンション装置10Fがバネ上部材HAに取付けられている位置(前方中心輪位置)における、バネ上部材HAの上下方向に沿った速度および変位量である。また、S206にて計算された前方中心輪側路面速度xr_F'および前方中心輪側路面変位量xr_Fは、前方中心輪側サスペンション装置10Fに連結すべき車輪(前方中心輪)の接地路面の上下方向に沿った速度および変位量である。前方中心輪側サスペンション装置10Fが本発明の仮想サスペンション装置および前輪側仮想サスペンション装置に相当する。
また、図12の前輪近似3輪モデルにおいて、右後輪側サスペンション装置10RRのバネのバネ定数がKs_rrにより、左後輪側サスペンション装置10RLのバネのバネ定数がKs_rlにより、前方中心輪側サスペンション装置10Fのバネのバネ定数がKs_Fにより表される。バネ定数Ks_Fは、例えば、右前輪側サスペンション装置10FRのバネのバネ定数Ks_frと左前輪側サスペンション装置10FLのバネのバネ定数Ks_flの平均により表すことができる。
また、右後輪側サスペンション装置10RRのダンパの減衰係数が、右後輪側線形減衰係数Cs_rrと右後輪側可変減衰係数Cv_rrとの和(Cs_rr+Cv_rr)により表される。右後輪側線形減衰係数Cs_rrは変動しない減衰係数を表し、右後輪側可変減衰係数Cv_rrは変動する減衰係数を表す。また、左後輪側サスペンション装置10RLのダンパの減衰係数が、左後輪側線形減衰係数Cs_rlと左後輪側可変減衰係数Cv_rlの和(Cs_rl+Cv_rl)により表される。左後輪側線形減衰係数Cs_rlは変動しない減衰係数を表し、左後輪側可変減衰係数Cv_rlは変動する減衰係数を表す。また、前方中心輪側サスペンション装置10Fのダンパの減衰係数が、前方中心輪側線形減衰係数Cs_Fと前方中心輪側可変減衰係数Cv_Fの和(Cs_F+Cv_F)により表される。前方中心輪側線形減衰係数Cs_Fは変動しない減衰係数を表し、前方中心輪側可変減衰係数Cv_Fは変動する減衰係数を表す。各線形減衰係数Cs_F,Cs_rr,Cs_rlは予め定められる。前方中心輪側線形減衰係数Cs_Fは、例えば右前輪側サスペンション装置10FRのダンパについて予め定められる右前輪側線形減衰係数Cs_frと左前輪側サスペンション装置10FLのダンパについて予め定められる左前輪側線形減衰係数Cs_flの平均により表すことができる。また、後輪側スタビライザ15により発生される捩り力の係数である後輪側捩り弾性係数がKstb_Rにより表される。
そして、S210にて、前輪近似制御部212は、前輪近似3輪モデルから導き出された運動方程式に基づいて設計された制御システムに非線形H∞制御理論を適用し、モデルに表されている3個のサスペンション装置10F,10RR,10RLの各可変減衰係数(前方中心輪側可変減衰係数Cv_F,右後輪側可変減衰係数Cv_rr,左後輪側可変減衰係数Cv_rl)を計算する。
前輪近似3輪モデルから導き出されるバネ上部材HAの運動方程式は、下記式(eq.26)〜(eq.28)のように表される。
式(eq.26)はバネ上部材HAのヒーブ運動方程式、式(eq.27)はロール運動方程式、式(eq.28)はピッチ運動方程式である。式(eq.27)において、Trは後輪側のトレッドである。また、各式において、Fsus_Fはバネ上部材HAの前方中心輪位置にてバネ上部材HAに上下方向に作用する力(前方中心輪側上下力)、Fsus_rrはバネ上部材HAの右後輪位置にてバネ上部材HAに上下方向に作用する力(右後輪側上下力)、Fsus_rlはバネ上部材HAの左後輪位置にてバネ上部材HAに上下方向に作用する力(左後輪側上下力)である。図13は、式(eq.26)〜(eq.28)に表される力の作用位置や加速度を表した図である。
前方中心輪側上下力Fsus_Fは下記式(eq.29)により、右後輪側上下力Fsus_frは下記式(eq.30)により、左後輪側上下力Fsus_rlは下記式(eq.31)により表される。
上記式(eq.29)〜(eq.31)において、Fsp_Fは前方中心輪側サスペンション装置10Fのバネにより発生される弾性力(前方中心輪側弾性力)、Fsp_rrは右後輪側サスペンション装置10RRのバネにより発生される弾性力(右後輪側弾性力)、Fsp_rlは左後輪側サスペンション装置10RLのバネにより発生される弾性力(左後輪側弾性力)である。FCs_Fは前方中心輪側サスペンション装置10Fのダンパにより発生される減衰力のうち、前方中心輪側線形減衰係数Cs_Fにより表される減衰力(前方中心輪側線形減衰力)、FCv_Fは前方中心輪側可変減衰係数Cv_Fにより表される減衰力(前方中心輪側可変減衰力)である。FCs_rrは右後輪側サスペンション装置10RRのダンパにより発生される減衰力のうち、右後輪側線形減衰係数Cs_rrにより表される減衰力(右後輪側線形減衰力)、FCv_rrは右後輪側可変減衰係数Cv_rrにより表される減衰力(右後輪側可変減衰力)である。FCs_rlは左後輪側サスペンション装置10RLのダンパにより発生される減衰力のうち、左後輪側線形減衰係数Cs_rlにより表される減衰力(左後輪側線形減衰力)、FCv_rlは左後輪側可変減衰係数Cv_rlにより表される減衰力(左後輪側可変減衰力)である。Fstb_Rは、後輪側スタビライザ15により発生される捩り弾性力(後輪側捩り弾性力)である。
前方中心輪側弾性力Fsp_F、右後輪側弾性力Fsp_rrおよび左後輪側弾性力Fsp_rlは、下記式(eq.32)〜(eq.34)により表される。
前方中心輪側線形減衰力FCs_F、右後輪側線形減衰力FCs_rrおよび左後輪側線形減衰力FCs_rlは、下記式(eq.35)〜(eq.37)により表される。
前方中心輪側可変減衰力FCv_F、右後輪側可変減衰力FCv_rrおよび左後輪側可変減衰力FCv_rlは、下記式(eq.38)〜(eq.40)により表される。
後輪側捩り弾性力Fstb_Rは、下記式(eq.41)により表される。
また、ヒーブ変位量xh、ロール角θrおよびピッチ角θpは、下記式(eq.42)に示されるように、モード変換行列を用いて前方中心輪側バネ上変位量xb_F、右後輪側バネ上変位量xb_rr、左後輪側バネ上変位量xb_rlに変換することができる。
以上の関係式から、前輪近似3輪モデルの状態空間表現が、下記式(eq.43)のように表される。
上記式(eq.43)において、状態量xp,評価出力zp,外乱wは、例えば下記式(eq.44)のように表される。
また、制御入力uは、下記式(eq.45)に示されるように、前方中心輪側可変減衰係数Cv_F、右後輪側可変減衰係数Cv_rrおよび左後輪側可変減衰係数Cv_rlである。
表3に、式(eq.43)に示された状態空間表現中の操作量(制御入力u)の個数、状態量の個数、状態空間表現の基礎となる前輪近似3輪モデルの自由度を示す。
表3に示されるように、前輪近似3輪モデルにより表されるバネ上部材の自由度は3自由度(上下運動、ロール運動、ピッチ運動)である。また、本モデルにおいてバネ下部材の運動は考慮しない。つまりバネ下部材は路面と同じように上下変位する。このためサスペンション装置の自由度は1自由度(バネ上部材の上下運動)である。したがって、このモデルの自由度は3自由度である。また、システムの外乱は、式(eq.44)に示されるように3輪(前方中心輪、右後輪、左後輪)の路面変位量xr_F,xr_rr,xr_rlである。この外乱をバネ上部材HAの変位にモード変換すると、外乱は、バネ上部材HAの上下変位、ロール変位、ピッチ変位により表される。したがって、外乱によるバネ上部材HAの自由度は3自由度である。モデルの自由度と外乱によるバネ上部材HAの自由度が等しいため、この制御システムは可制御である。
前輪近似制御部212は、上式のように表される状態空間表現、状態量、評価出力および制御量を用い、非線形H∞制御理論に基づいて制御入力uを求める。解析手法の詳細は、後輪近似3輪モデルを用いて行われる手法と同様であるので説明を省略する。制御入力uを求めることにより、各可変減衰係数Cv_F,Cv_rr,Cv_rlが得られる。
可変減衰係数を計算した後、前輪近似制御部212は図6のS212に進み、第2前方中心輪側要求減衰力F2req_F,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rlを計算する。これらの要求減衰力は、前輪近似3輪モデルに表される各サスペンション装置のダンパにより発生されるべき制御目標の減衰力(要求減衰力)である。第2前方中心輪側要求減衰力F2req_Fは、前輪近似3輪モデルに表される前方中心輪側サスペンション装置10Fについての要求減衰力であり、前方中心輪側線形減衰係数Cs_Fと前方中心輪側可変減衰係数Cv_Fとの和(Cs_F+Cv_F)に前方中心輪側バネ上−路面間相対速度(xr_F'-xb_F')を乗じることにより計算される。第2右後輪側要求減衰力F2req_rrは、前輪近似3輪モデルに表される右後輪側サスペンション装置10RRについての要求減衰力であり、右後輪側線形減衰係数Cs_rrと右後輪側可変減衰係数Cv_rrとの和(Cs_rr+Cv_rr)に右後輪側バネ上−路面間相対速度(xr_rr'-xb_rr')を乗じることにより計算される。第2左後輪側要求減衰力F2req_rlは、前輪近似3輪モデルに表される左後輪側サスペンション装置10RLについての要求減衰力であり、左後輪側線形減衰係数Cs_rlと左後輪側可変減衰係数Cv_rlとの和(Cs_rl+Cv_rl)に左後輪側バネ上−路面間相対速度(xr_rl'-xb_rl')を乗じることにより計算される。S212にて前輪近似3輪モデルに表される3個のサスペンション装置10F,10RR,10RLについての要求減衰力を計算する処理が、本発明のモデル要求減衰力計算手段に相当する。
次に、前輪近似制御部212は、S214にて、第2前方中心輪側要求減衰力F2req_Fを第2右前輪側要求減衰力F2req_frおよび第2左前輪側要求減衰力F2req_flに分配する。具体的には、第2前方中心輪側要求減衰力F2req_Fを2で割ることにより、第2右前輪側要求減衰力F2req_frおよび第2左前輪側要求減衰力F2req_flを計算する。第2右前輪側要求減衰力F2req_frは、前輪近似3輪モデルに基づいて計算される右前輪側サスペンション装置10FRについての要求減衰力であり、第2左前輪側要求減衰力F2req_flは左前輪側サスペンション装置10FLについての要求減衰力である。本実施形態のように前方中心輪側サスペンション装置10Fの取付位置が右前輪側サスペンション装置10FRの取付位置と左前輪側サスペンション装置10FLの取付位置の中間に位置している場合、第2右前輪側要求減衰力F2req_frの大きさと第2左前輪側要求減衰力F2req_flの大きさが等しくなるように、つまり分配比率が1:1になるように、第2前方中心輪側要求減衰力F2req_Fが第2右前輪側要求減衰力F2req_frと第2左前輪側要求減衰力F2req_flに分配される。このS214にて行われる処理が、本発明の要求減衰力分配手段に相当する。
S214にて第2右前輪側要求減衰力F2req_frおよび第2左前輪側要求減衰力F2req_flを計算した後、前輪近似制御部212はS216に進み、第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rlを出力する。その後、S218に進んでこのプログラムを終了する。以上の説明からわかるように、本実施形態の前輪近似制御部212は、前輪近似3輪モデルから導出されるバネ上部材HAの上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前輪近似3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算する。また、計算した要求減衰力のうち前方中心輪側サスペンション装置10Fについての要求減衰力(第2前方中心輪側要求減衰力F2req_F)を、この前方中心輪側サスペンション装置10Fに置き換えられた右前輪側サスペンション装置10FRおよび左前輪側サスペンション装置10FLについての要求減衰力(第2右前輪側要求減衰力F2req_frおよび第2左前輪側要求減衰力F2req_fl)に分配する。これにより、バネ上部材HAの各輪位置に取付けられた4個のサスペンション装置についての要求減衰力が計算される。この前輪近似制御部212が、本発明の第2要求減衰力計算手段に相当する。
図7は、旋回状態判定部213が実行する旋回状態判定プログラムの流れを示すフローチャートである。旋回状態判定部213はこのプログラムを図7のS300にて開始する。次いで、S302にて、車速センサ226から車速Vを、舵角センサ227から操舵輪の転舵角φを、ヨーレートセンサ228から実ヨーレートYRを入力する。
次に、S304にて、現在の車両の走行状態から推定される目標ヨーレートYR*を計算する。目標ヨーレートYR*は車両の走行状態から導出されるヨーレートの推定値であり、車速V、転舵角φ、規範車両モデルを表す各種値(ホイールベースなど)に基づいて計算される。S304にて目標ヨーレートを計算する処理が、本発明の目標ヨーレート計算手段に相当する。
続いて、旋回状態判定部213は、S306にて、実ヨーレートYRと、目標ヨーレートYR*と実ヨーレートYRとの差であるヨーレート偏差(YR*−YR)との積が正(または0)であるか否かを判定する。この判定結果がYesであるとき(S306:Yes)は、S308に進んで旋回状態フラグRSをUSに設定する。一方、判定結果がNoであるとき(S306:No)は、S310に進んで旋回状態フラグRSをOSに設定する。旋回状態フラグRSがUSに設定されているときは、車両の旋回状態がアンダーステア状態(またはニュートラルステア状態)であることを表す。旋回状態フラグRSがOSに設定されているときは、車両の旋回状態がオーバーステア状態であることを表す。
図14は、実ヨーレートYRおよび目標ヨーレートYR*と、車両の旋回状態との関係を表したグラフである。グラフの横軸は実ヨーレートYR、縦軸はヨーレート偏差(YR*−YR)である。また、ヨーレートは、例えば右旋回時に正、左旋回時に負となるように、検出および計算される。図からわかるように、実ヨーレートYRとヨーレート偏差(YR*−YR)との積YR(YR*−YR)が正であるとき、つまり、実ヨーレートYRとヨーレート偏差(YR*−YR)の関係がグラフの第一象限または第三象限に表されるときは、車両の旋回状態がアンダーステア状態である。また、積YR(YR*−YR)が負であるとき、つまり、実ヨーレートYRとヨーレート偏差(YR*−YR)との関係がグラフの第二象限または第四象限に表されるときは、車両の旋回状態がオーバーステア状態である。
実ヨーレートYRの絶対値が目標ヨーレートYR*の絶対値よりも小さい場合、両者の関係はグラフの第一象限または第三象限に表される。この場合は、実ヨーレートYRが目標ヨーレートYR*よりも小さいために、一定舵角にて、車速アップさせた時、車両の旋回半径が次第に大きくなる。よって、車両の旋回状態はアンダーステア状態になる。また、実ヨーレートYRの絶対値が目標ヨーレートYR*の絶対値よりも大きい場合、両者の関係はグラフの第二象限または第四象限に表される。この場合は、実ヨーレートYRが目標ヨーレートYR*よりも大きいために、一定舵角にて、車速アップさせた時、車両の旋回半径が次第に小さくなる。よって、車両の旋回状態はオーバーステア状態になる。
以上のことから、実ヨーレートYRとヨーレート偏差(YR*−YR)との積の正負に基づいて、車両の旋回状態がアンダーステア状態であるか、オーバーステア状態であるかを判定することができる。S306にて実ヨーレートYRとヨーレート偏差(YR*−YR)との積の正負を判定する処理が、本発明の旋回状態判定手段に相当する。
S308またはS310にて、旋回状態フラグRSをUSまたはOSのいずれかに設定した後、旋回状態判定部はS312に進み、設定した旋回状態フラグRSを出力する。その後、S314に進んでこのプログラムを終了する。
図8は、統合制御部214が実行する統合制御プログラムの流れを示すフローチャートである。統合制御部214はこのプログラムを図のS400にて開始する。次いで、S402にて、後輪近似制御部211が計算した第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rlを入力する。次に、S404にて、前輪近似制御部212が計算した第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rlを入力する。
次に、統合制御部214は、S406にて、旋回状態判定部213から旋回状態フラグRSを入力する。その後S408に進み、旋回状態フラグRSがUSに設定されているか否か、すなわち車両の旋回状態がアンダーステア状態(またはニュートラルステア状態)であるか否かを判定する。この判定結果がYesである場合はS410に進む。一方、この判定結果がNoである場合、すなわち車両の旋回状態がオーバーステア状態である場合は、S412に進む。
S410では、統合制御部214は、各サスペンション装置10FR,10FL,10RR,10RLのダンパが発生すべき減衰力を、後輪近似制御部211から入力した要求減衰力に基づいて決定する。すなわち、右前輪側サスペンション装置10FRのダンパが発生すべき減衰力を表す右前輪側要求減衰力Freq_frは第1右前輪側要求減衰力F1req_frに、左前輪側サスペンション装置10FLのダンパが発生すべき減衰力を表す左前輪側要求減衰力Freq_flは第1左前輪側要求減衰力F1req_flに、右後輪側サスペンション装置10RRのダンパが発生すべき減衰力を表す右後輪側要求減衰力Freq_rrは第1右後輪側要求減衰力F1Freq_rrに、左後輪側サスペンション装置10RLのダンパが発生すべき減衰力を表す左後輪側要求減衰力Freq_rlは第1左後輪側要求減衰力F1req_rlに、それぞれ決定される。
一方、S412では、統合制御部214は、各サスペンション装置10FR,10FL,10RR,10RLのダンパが発生すべき減衰力を、前輪近似制御部212から入力した要求減衰力に基づいて決定する。すなわち、右前輪側要求減衰力Freq_frが第2右前輪側要求減衰力F2req_frに、左前輪側要求減衰力Freq_flが第2左前輪側要求減衰力F2req_flに、右後輪側要求減衰力Freq_rrが第2右後輪側要求減衰力F2req_rrに、左後輪側要求減衰力Freq_rlが第2左後輪側要求減衰力F2req_rlに、それぞれ決定される。
S410またはS412にて各サスペンション装置10FR,10FL,10RR,10RLのダンパが発生すべき要求減衰力Freq_fr,Freq_fl,Freqrr,Freq_rlを決定した後は、統合制御部はS414に進み、決定した要求減衰力Freq_fr,Freq_fl,Freqrr,Freq_rlを表す駆動信号を各駆動回路に出力する。その後、S414に進んでこのプログラムを終了する。
出力された要求減衰力を表す駆動信号は、それぞれ対応する各駆動回路23FR,23FL,23RR,23RLに入力される。各駆動回路はそれぞれ入力された駆動信号に基づいて、対応するアクチュエータ132FR,132FL,132RR,132RLに駆動電流を出力する。この駆動電流により各アクチュエータが駆動する。アクチュエータの駆動により、対応するバルブ131が作動する。バルブ131の作動によりサスペンション装置10のダンパ12の減衰係数(減衰力特性)が所望の大きさに変更制御される。これによりバネ上部材HAの各輪位置に取付けられた4個のサスペンション装置の減衰力が制御される。
このように、統合制御部214は、後輪近似制御部211と前輪近似制御部212とのいずれか一方により計算された要求減衰力に基づいて、バネ上部材HAの各輪位置に取付けられた4個のサスペンション装置についての減衰力を制御する。したがって、統合制御部214、特に決定された要求減衰力Freq_fr,Freq_fl,Freqrr,Freq_rlを各駆動回路に出力するS414の処理が、本発明の減衰力制御手段に相当する。また、統合制御部214は、旋回状態判定部213により判定された車両の旋回状態に基づいて、後輪近似3輪モデルを用いて計算された要求減衰力と前輪近似3輪モデルを用いて計算された要求減衰力のいずれか一方を選択する。具体的には、車両の旋回状態がアンダーステア状態であると判定されたとき(S408:Yes)には後輪近似3輪モデルを基に計算された要求減衰力を選択し(S410)、S408にて車両の旋回状態がオーバーステア状態であると判定されたとき(S408:No)には前輪近似3輪モデルを基に計算された要求減衰力を選択する(S412)。これらの処理が、本発明の要求減衰力選択手段に相当する。
本実施形態によれば、車両モデルとして3輪モデル(後輪近似3輪モデルまたは前輪近似3輪モデル)を用い、このモデルから導出される運動方程式に基づいて制御システムが設計されるため、制御システムが可制御になる。したがって、このように可制御な制御システムに非線形H∞制御理論を適用することにより可変減衰係数を計算することができる。こうして計算された可変減衰係数を基に、バネ上部材HAの各輪位置に取付けられた4個のサスペンション装置の減衰力を制御することができる。
また、各サスペンション装置の自由度をバネ上部材の運動のみを考慮した1自由度としても、システムは可制御になる。このため、バネ下部材の運動を考慮せずに各サスペンション装置の減衰力を制御することができる。よって、非線形H∞制御理論に基づいて可変減衰係数を計算する際におけるサスペンションECU21の演算負荷が軽減される。
また、車両の旋回状態がアンダーステア状態であるときには、後輪近似3輪モデルに基づいて算出される要求減衰力により、各サスペンション装置により発生される減衰力が制御される。このような減衰力制御により、左右前輪側のサスペンション装置10FR,10FLは、車両の旋回に伴い発生するバネ上部材HAのローリング運動を抑えるように、旋回状態に応じて適正な減衰力を発生する。これにより前輪側の横滑りが抑えられ、車両の旋回状態はアンダーステア状態からニュートラルステア状態に近づく。つまりアンダーステア状態が矯正される。
また、車両の旋回状態がオーバーステア状態であるときには、前輪近似3輪モデルに基づいて算出される要求減衰力により各サスペンション装置にて発生される減衰力が制御される。このような減衰力制御により、左右後輪側のサスペンション装置10RR,10RLは、車両の旋回に伴い発生するバネ上部材HAのローリング運動を抑えるように、旋回状態に応じて適正な減衰力を発生する。これにより後輪側の横滑りの発生が抑えられ、車両の旋回状態はオーバーステア状態からニュートラルステア状態に近づく。つまりオーバーステア状態矯正される。
このように、車両の旋回状態がアンダーステア状態であるときには後輪近似3輪モデルを用いて計算された要求減衰力によりバネ上部材の各輪位置に取付けられたサスペンション装置の減衰力を制御し、車両の旋回状態がオーバーステア状態であるときには前輪近似3輪モデルを用いて計算された要求減衰力によりバネ上部材の各輪位置に取付けられたサスペンション装置の減衰力を制御することにより、アンダーステア状態およびオーバーステア状態が矯正されるので、旋回時安定性がより向上する。
(第2実施形態)
次に、本発明の第2実施形態について説明する。上記第1実施形態の減衰力制御装置は、車両の旋回状態に基づいて、後輪近似3輪モデルを用いて減衰力を制御するか前輪近似3輪モデルを用いて減衰力を制御するかを決定するが、本実施形態の減衰力制御装置は、バネ上加速度センサが正常か異常かに基づいて、後輪近似3輪モデルを用いて減衰力を制御するか前輪近似3輪モデルを用いて減衰力を制御するかを決定する。それ以外の部分は上記第1実施形態と同様である。以下、本実施形態の特徴部分を中心に説明する。
次に、本発明の第2実施形態について説明する。上記第1実施形態の減衰力制御装置は、車両の旋回状態に基づいて、後輪近似3輪モデルを用いて減衰力を制御するか前輪近似3輪モデルを用いて減衰力を制御するかを決定するが、本実施形態の減衰力制御装置は、バネ上加速度センサが正常か異常かに基づいて、後輪近似3輪モデルを用いて減衰力を制御するか前輪近似3輪モデルを用いて減衰力を制御するかを決定する。それ以外の部分は上記第1実施形態と同様である。以下、本実施形態の特徴部分を中心に説明する。
本実施形態におけるサスペンション制御装置の全体構成は、上記第1実施形態にて説明した図1と同様の構成であるため、その説明を省略する。図15は、本実施形態に係る電気制御装置の20概略構成を示す図である。図に示されるように、本実施形態に係る電気制御装置20は、上記第1実施形態に係る電気制御装置と同様に、各種センサと、サスペンションECU21と、各駆動回路を備える。ただし、上記第1実施形態と異なり、車速センサ、舵角センサ、ヨーレートセンサは設けられていない。図15において、上記第1実施形態で説明した電気制御装置20(図3)の構成と同一の構成については同一の符号により示す。
図15からわかるように、本実施形態の電気制御装置20も、バネ上加速度センサ221FR,221FL,221RR,221RLを備える。右前輪側バネ上加速度センサ221FRはバネ上部材HAの右前輪位置に取付けられ、右前輪位置におけるバネ上部材HAの上下加速度を検出する。左前輪側バネ上加速度センサ221FLはバネ上部材HAの左前輪位置に取付けられ、左前輪位置におけるバネ上部材HAの上下加速度を検出する。右後輪側バネ上加速度センサ221RRはバネ上部材HAの右後輪位置に取付けられ、右後輪位置におけるバネ上部材HAの上下加速度を検出する。左後輪側バネ上加速度センサ221RLはバネ上部材HAの左後輪位置に取付けられ、左後輪位置におけるバネ上部材HAの上下加速度を検出する。その他の構成についても上記第1実施形態と同様であるため、説明は省略する。
図16は、サスペンションECU21を機能毎に示した図である。図からわかるように、サスペンションECU21は、後輪近似制御部211,前輪近似制御部212および統合制御部214を備える。後輪近似制御部211においては、上記第1実施形態と同様に、後輪近似3輪モデルから導出されるバネ上部材HAのヒーブ運動方程式、ロール運動方程式、ピッチ運動方程式に基づいて設計される制御システム(一般化プラント)に非線形H∞制御理論を適用することにより、右前輪側サスペンション装置10FR,左前輪側サスペンション装置10FL,後方中心輪側サスペンション装置10Rのダンパにより発生されるべき減衰力(第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1後方中心輪側要求減衰力F1req_R)がそれぞれ計算される。さらに計算された要求減衰力のうち後方中心輪側サスペンション装置10Rについての要求減衰力(第1後方中心輪側要求減衰力F1req_R)が、右後輪側サスペンション装置10RRおよび左後輪側サスペンション装置10RLについての要求減衰力(第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rl)に分配される。これにより、後輪近似3輪モデルに基づいて、第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rlが計算される。
前輪近似制御部212においても、上記第1実施形態と同様に、前輪近似3輪モデルから導出されるバネ上部材HAのヒーブ運動方程式、ロール運動方程式、ピッチ運動方程式に基づいて設計される制御システム(一般化プラント)に非線形H∞制御理論を適用することにより、前方中心輪側サスペンション装置10F,右後輪側サスペンション装置10RR,左後輪側サスペンション装置10RLのダンパにより発生されるべき減衰力(第2前方中心輪側要求減衰力F2req_F,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rl)がそれぞれ計算される。さらに計算された要求減衰力のうち前方中心輪側サスペンション装置10Fについての要求減衰力(第2前方中心輪側要求減衰力F2req_F)が、右前輪側サスペンション装置10FRおよび左前輪側サスペンション装置10FLについての要求減衰力(第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl)に分配される。これにより、前輪近似3輪モデルに基づいて、第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rlが、それぞれ計算される。
統合制御部214においては、バネ上加速度センサの異常状態、具体的にはどのバネ上加速度センサが異常であるのかに基づいて、後輪近似制御部211にて計算された要求減衰力および前輪近似制御部212にて計算された要求減衰力のいずれかを選択し、選択した要求減衰力に基づいて、バネ上部材HAの各輪位置に取付けられた4個のサスペンション装置の減衰力を制御する。図17は本実施形態の統合制御部214が実行する処理の流れを示すフローチャートである。
図17に示されるように、統合制御部214は、統合制御処理を図17のS500にて開始する。次いで、S502にて、後輪近似制御部211により計算された要求減衰力(第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rl)を入力する。次に、S504にて、前輪近似制御部212により計算された要求減衰力(第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_fl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rl)を入力する。
続いて、統合制御部214は、S506にて、右前輪側バネ上加速度センサ221FR,左前輪側バネ上加速度センサ221FL,右後輪側バネ上加速度センサ221RR,左後輪側バネ上加速度センサ221RLが全て正常に作動しているか否かを判定する。各センサが正常であるか異常であるかについては、各センサから入力される信号の変化や、各センサから入力される信号同士の比較により判断することができる。
本実施形態においては、全てのバネ上加速度センサが正常に作動している場合は、後輪近似3輪モデルに基づいて計算された要求減衰力により各サスペンション装置の減衰力が制御される。したがって、S506の判定結果がYesである場合はS512に進み、右前輪側要求減衰力Freq_frを第1右前輪側要求減衰力F1req_frに、左前輪側要求減衰力Freq_flを第1左前輪側要求減衰力F1req_flに、右後輪側要求減衰力Freq_rrを第1右後輪側要求減衰力F1req_rrに、左後輪側要求減衰力Freq_rlを第1左後輪側要求減衰力F1req_rlに、それぞれ設定する。次いで、統合制御部はS516に進み、設定した要求減衰力を出力する。その後、S520に進んでこのプログラムを終了する。
一方、S506の判定結果がNoである場合、つまり、4つのバネ上加速度センサのうちの少なくとも一つが異常である場合は、S508に進む。S508では、統合制御部214は、異常であるバネ上加速度センサの個数が1個であるか否かを判定する。この判定結果がYesである場合はS510に進む。S510では、統合制御部214は、異常と判断されたバネ上加速度センサが右後輪側バネ上加速度センサ221RRおよび左後輪側バネ上加速度センサ221RLのいずれかであるか否かを判定する。この判定結果がYesである場合はS512に進み、後輪近似3輪モデルに基づいて計算された要求減衰力を選択する。そして、S516にて選択した要求減衰力を出力する。その後S520に進んでこのプログラムを終了する。このように、本実施形態においては、4つのバネ上加速度センサのうち異常センサが1つであり、且つ異常センサがバネ上部材HAの後輪位置に取付けられたバネ上加速度センサである場合は、後輪近似3輪モデルを用いて計算された要求減衰力に基づいて、各サスペンション装置の減衰力が制御される。
また、S510の判定結果がNoである場合、つまり、異常と判断されたバネ上加速度センサが右前輪側バネ上加速度センサ221FRおよび左前輪側バネ上加速度センサ221FLのいずれかである場合はS514に進む。そして、S514にて、前輪近似3輪モデルに基づいて計算された要求減衰力を選択する。すなわち、右前輪側要求減衰力Freq_frを第2右前輪側要求減衰力F2req_frに、左前輪側要求減衰力Freq_flを第2左前輪側要求減衰力F2req_flに、右後輪側要求減衰力Freq_rrを第2右後輪側要求減衰力F2req_rrに、左後輪側要求減衰力Freq_rlを第2左後輪側要求減衰力F2req_rlに、それぞれ設定する。次いで、統合制御部214はS516に進み、設定した要求減衰力を出力する。その後、S520に進んでこのプログラムを終了する。このように、本実施形態においては、4つのバネ上加速度センサのうち異常センサが1つであり、且つ異常センサがバネ上部材HAの前輪位置に取付けられたバネ上加速度センサである場合は、前輪近似3輪モデルを用いて計算された要求減衰力に基づいて、各サスペンション装置の減衰力が制御される。
また、S508の判定結果がNoである場合、つまり異常センサの個数が複数である場合は、バネ上部材HAの振動状態が正確に把握できない。この場合、バネ上部材HAの振動を効果的に抑制することが困難であるので、S518に進み、減衰力の可変制御を禁止する。その後、S520に進んでこのプログラムを終了する。
本実施形態によれば、右前輪側バネ上加速度センサ221FRおよび左前輪側バネ上加速度センサ221FLのいずれか一方が異常であり、その他のバネ上加速度センサが正常であるときには、前輪近似制御部212により計算された要求減衰力(第2右前輪側要求減衰力F2req_fr,第2左前輪側要求減衰力F2req_rl,第2右後輪側要求減衰力F2req_rr,第2左後輪側要求減衰力F2req_rl)に基づいてバネ上部材HAの各輪位置に取付けられたサスペンション装置の減衰力が制御される。また、右後輪側バネ上加速度センサ221RRおよび左後輪側バネ上加速度センサ221RLのいずれか一方が異常であり、その他のバネ上加速度センサが正常であるときには、後輪近似制御部211により計算された要求減衰力(第1右前輪側要求減衰力F1req_fr,第1左前輪側要求減衰力F1req_fl,第1右後輪側要求減衰力F1req_rr,第1左後輪側要求減衰力F1req_rl)に基づいてバネ上部材HAの各輪位置に取付けられたサスペンション装置の減衰力が制御される。
このように、4つのバネ上加速度センサのうちの1つが異常であっても、前輪近似3輪モデルあるいは後輪近似3輪モデルを用いて要求減衰力を計算することにより、非線形H∞制御理論に基づいた各サスペンション装置の減衰力制御を継続することができる。また、異常センサが設置される側の2つのサスペンション装置を1つの仮想サスペンション装置に近似する3輪モデルを用いて要求減衰力を計算しているので、バネ上部材HAの振動が効果的に抑制される。
(第3実施形態)
次に、本発明の第3実施形態について説明する。上記第1および第2実施形態に記載の減衰力制御装置は、後輪近似3輪モデルを用いて計算した要求減衰力と前輪近似3輪モデルを用いて計算した要求減衰力とのいずれかを選択し、選択した要求減衰力に基づいて各サスペンション装置の減衰力を制御している。これに対し、本実施形態においては、用いる3輪モデルが予め後輪近似3輪モデルに決められている。そして、減衰力制御装置は、後輪近似3輪モデルを用いて計算した要求減衰力に基づいて各サスペンション装置の減衰力を制御する。
次に、本発明の第3実施形態について説明する。上記第1および第2実施形態に記載の減衰力制御装置は、後輪近似3輪モデルを用いて計算した要求減衰力と前輪近似3輪モデルを用いて計算した要求減衰力とのいずれかを選択し、選択した要求減衰力に基づいて各サスペンション装置の減衰力を制御している。これに対し、本実施形態においては、用いる3輪モデルが予め後輪近似3輪モデルに決められている。そして、減衰力制御装置は、後輪近似3輪モデルを用いて計算した要求減衰力に基づいて各サスペンション装置の減衰力を制御する。
本実施形態におけるサスペンション制御装置の全体構成は、上記第1実施形態にて説明した図1と同様の構成であるため、その説明を省略する。図18は、本実施形態に係る電気制御装置20を示す概略図である。図に示す通り、本実施形態に係る電気制御装置20は、上記第1実施形態に係る電気制御装置と同様に、各種センサと、サスペンションECU21と、各駆動回路を備える。ただし、上記第1実施形態と異なり、車速センサ、舵角センサ、ヨーレートセンサは設けられていない。図18において、上記第1実施形態で説明した電気制御装置20(図3)の各構成と同一の構成については同一の符号により示し、その具体的な説明は省略する。
また、図18からわかるように、サスペンションECU21は後輪近似制御部211を備える。なお、本実施形態のサスペンションECU21は、上記第1実施形態にて説明したサスペンションECU21が有している前輪近似制御部212、旋回状態判定部213および統合制御部214に相当する機能を備えていなくてもよい。
このような構成のサスペンション制御装置において、バネ上部材の各輪位置に取付けられた各サスペンション装置の減衰力を制御するときは、サスペンションECU21の後輪近似制御部211は後輪近似制御プログラムを実行する。図19は、本実施形態において後輪近似制御部211が実行する後輪近似制御プログラムの流れを示すフローチャートである。このフローチャートに示されるステップのうち、S602〜S610の各ステップは、それぞれ、上記第1実施形態にて説明した図5の後輪近似制御プログラムのフローチャートのS102〜S110の各ステップと同一の処理内容を表す。したがって、後輪近似制御部211は、S602〜S610に示された処理を順次実行することにより、上記第1実施形態にて説明したように右前輪側可変減衰係数Cv_fr,左前輪側可変減衰係数Cv_fl,後方中心輪側可変減衰係数Cv_Rを計算する。
次に、後輪近似制御部211は、S612にて、右前輪側線形減衰係数Cs_frと右前輪側可変減衰係数Cv_frとの和(Cs_fr+Cv_fr)に右前輪側バネ上−路面間相対速度(xr_fr'-xb_fr')を乗じることにより右前輪側要求減衰力Freq_frを、左前輪側線形減衰係数Cs_flと左前輪側可変減衰係数Cv_flとの和(Cs_fl+Cv_fl)に左前輪側バネ上−路面間相対速度(xr_fl'-xb_fl')を乗じることにより左前輪側要求減衰力Freq_flを、後方中心輪側線形減衰係数Cs_Rと後方中心輪側可変減衰係数Cv_Rとの和(Cs_R+Cv_R)に後方中心輪側バネ上−路面間相対速度(xr_R'-xb_R')を乗じることにより後方中心輪側要求減衰力Freq_Rを、それぞれ計算する。ここまでのステップが、本発明のモデル要求減衰力計算手段に相当する。
次いで、後輪近似制御部211は、S614にて、後方中心輪側要求減衰力Freq_Rを2で割ることにより、右後輪側要求減衰力Freq_rrと左後輪側要求減衰力Freq_rlを計算する(要求減衰力分配手段)。そして、S616にて、右前輪側要求減衰力Freq_fr,左前輪側要求減衰力Freq_fl,右後輪側要求減衰力Freq_rr,左後輪側要求減衰力Freq_rlを表す駆動信号を、それぞれ対応する駆動回路132FR,132FL,132RR,132RLに出力する(要求減衰力制御手段)。これにより各サスペンション装置の減衰力が、後輪近似3輪モデルを用いて計算された要求減衰力に基づいて制御される。その後S618に進んでこのプログラムを終了する。
このように、本実施形態によれば、後輪近似3輪モデルのみを用いて計算された要求減衰力に基づいて、各サスペンション装置の減衰力が制御される。後輪近似3輪モデルを用いて減衰力を制御した場合、上記したように前輪側に配置された左右のサスペンション装置がロール振動を効果的に抑制するような減衰力を発生する。したがって、前輪側の旋回時安定性を重視する車両に後輪近似3輪モデルを用いた減衰力制御を適用するのがよい。例えば駆動輪が前輪であるFF車や、前席側の安定性を重視する車両などに、後輪近似3輪モデルを用いた減衰力制御を適用することができる。また、バネ上部材の前輪側に2個のバネ上加速度センサが、後輪側に1個のバネ上加速度センサが取付けられている車両についても後輪近似3輪モデルを用いて各輪位置に取付けられたサスペンション装置の減衰力を制御することができる。
(第4実施形態)
次に、本発明の第4実施形態について説明する。本実施形態においては、用いる3輪モデルが予め前輪近似3輪モデルに決められている。そして、減衰力制御装置は、前輪近似3輪モデルを用いて計算した要求減衰力に基づいて各サスペンション装置の減衰力を制御する。
次に、本発明の第4実施形態について説明する。本実施形態においては、用いる3輪モデルが予め前輪近似3輪モデルに決められている。そして、減衰力制御装置は、前輪近似3輪モデルを用いて計算した要求減衰力に基づいて各サスペンション装置の減衰力を制御する。
本実施形態におけるサスペンション制御装置の全体構成は、上記第1実施形態にて説明した図1と同様の構成であるため、その説明を省略する。図20は、本実施形態に係る電気制御装置20を示す概略図である。図に示す通り、本実施形態に係る電気制御装置20は、上記第1実施形態に係る電気制御装置と同様に、各種センサと、サスペンションECU21と、各駆動回路を備える。ただし、上記第1実施形態と異なり、車速センサ、舵角センサ、ヨーレートセンサは設けられていない。図20において、上記第1実施形態で説明した電気制御装置20(図3)の各構成と同一の構成については同一の符号により示し、その具体的な説明は省略する。
また、図20からわかるように、サスペンションECU21は前輪近似制御部212を備える。なお、本実施形態のサスペンションECU21は、上記第1実施形態にて説明したサスペンションECU21が有している後輪近似制御部211、旋回状態判定部213および統合制御部214に相当する機能を備えていなくてもよい。
このような構成のサスペンション制御装置において、バネ上部材の各輪位置に取付けられた各サスペンション装置の減衰力を制御するときは、サスペンションECU21の前輪近似制御部212は前輪近似制御プログラムを実行する。図21は、本実施形態において前輪近似制御部212が実行する前輪近似制御プログラムの流れを示すフローチャートである。このフローチャートに示されるステップのうち、S702〜S710の各ステップは、それぞれ、上記第1実施形態にて説明した前輪近似制御プログラムのフローチャートである図6のS202〜S210の各ステップと同一の処理内容を表す。したがって、前輪近似制御部212は、S702〜S710に示された処理を順次実行することにより、上記第1実施形態にて説明したように前方中心輪側可変減衰係数Cv_F,右後輪側可変減衰係数Cv_rr,左後輪側可変減衰係数Cv_rlを計算する。
次に、前輪近似制御部212は、S712にて、前方中心輪側線形減衰係数Cs_Fと前方中心輪側可変減衰係数Cv_Fとの和(Cs_F+Cv_F)に前方中心輪側バネ上−路面間相対速度(xr_F'-xb_F')を乗じることにより前方中心輪側要求減衰力Freq_Fを、右後輪側線形減衰係数Cs_rrと右後輪側可変減衰係数Cv_rrとの和(Cs_rr+Cv_rr)に右後輪側バネ上−路面間相対速度(xr_rr'-xb_rr')を乗じることにより右後輪側要求減衰力Freq_rrを、左後輪側線形減衰係数Cs_rlと左後輪側可変減衰係数Cv_rlとの和(Cs_rl+Cv_rl)に左後輪側バネ上−路面間相対速度(xr_rl'-xb_rl')を乗じることにより左後輪側要求減衰力Freq_rlを、それぞれ計算する。ここまでのステップが、本発明のモデル要求減衰力計算手段に相当する。
次いで、前輪近似制御部212は、S714にて、前方中心輪側要求減衰力Freq_Fを2で割ることにより、右前輪側要求減衰力Freq_frと左前輪側要求減衰力Freq_flを計算する(要求減衰力分配手段)。そして、S716にて、右前輪側要求減衰力Freq_fr,左前輪側要求減衰力Freq_fl,右後輪側要求減衰力Freq_rr,左後輪側要求減衰力Freq_rlを表す駆動信号を、それぞれ対応する駆動回路132FR,132FL,132RR,132RLに出力する(要求減衰力制御手段)。これにより各サスペンション装置の減衰力が、前輪近似3輪モデルを用いて計算された要求減衰力に基づいて制御される。その後S718に進んでこのプログラムを終了する。
このように、本実施形態によれば、前輪近似3輪モデルのみを用いて計算された要求減衰力に基づいて、各サスペンション装置の減衰力が制御される。前輪近似3輪モデルを用いて減衰力を制御した場合、上記したように後輪側に配置された左右のサスペンション装置がロール振動を効果的に抑制するような減衰力を発生する。したがって、後輪側の旋回時安定性を重視する車両に前輪近似3輪モデルを用いた減衰力制御を適用するのがよい。例えば駆動輪が後輪であるFR車や、高級車など後席側の安定性を重視する車両などに、前輪近似3輪モデルを用いた減衰力制御を適用することができる。また、バネ上部材の後輪側に2個のバネ上加速度センサが、前輪側に1個のバネ上加速度センサが取付けられている車両についても前輪近似3輪モデルを用いて各輪位置に取付けられたサスペンション装置の減衰力を制御することができる。
以上、本発明の実施形態について説明したが、本発明は、上記実施形態に限定されるべきものではない。例えば、上記第1実施形態において、旋回状態判定部213は、実ヨーレートYRとヨーレート偏差(YR*−YR)との積の正負に基づいて車両の旋回状態がアンダーステア状態であるのかオーバーステア状態であるのかを判定しているが、その他の方法により車両の旋回状態を判定してもよい。また、上記第1実施形態においては車両の旋回状態に基づいて、上記第2実施形態においてはバネ上加速度センサの異常状態に基づいて、後輪近似3輪モデルを用いて計算された要求減衰力に基づいて各サスペンション装置の減衰力を制御するのか、前輪近似3輪モデルを用いて計算された要求減衰力に基づいて各サスペンション装置の減衰力を制御するのかを決めている。しかし、それ以外の要因、例えばユーザーの好みに応じて、後輪近似3輪モデルを用いて計算された要求減衰力と前輪近似3輪モデルを用いて計算された要求減衰力のいずれかを選択できるようにしてもよい。
また、上記第1実施形態においては、2つの3輪モデルを用いてそれぞれ要求減衰力を計算し、計算した要求減衰力のいずれかを車両の旋回状態に基づいて選択し、選択した要求減衰力に基づいて各サスペンション装置の減衰力を制御している。しかし、用いる3輪モデルを何らかの条件(例えば車両の旋回状態)に基づいて先に決定し、決定した3輪モデルを用いて計算された要求減衰力に基づいて各サスペンション装置の減衰力を制御してもよい。この場合、用いる3輪モデルを先に決定しているので、用いない3輪モデルに基づいて要求減衰力を計算することを要しない。よって、演算負荷が軽減する。このように、本発明は、その趣旨を逸脱しない限りにおいて変形可能である。
1…サスペンション制御装置、10FR…右前輪側サスペンション装置、10FL…左前輪側サスペンション装置、10F…前方中心輪側サスペンション装置(仮想サスペンション装置、前方側仮想サスペンション装置)、10RR…右後輪側サスペンション装置、10RL…左後輪側サスペンション装置、10R…後方中心輪側サスペンション装置(仮想サスペンション装置,後方側仮想サスペンション装置)、11…バネ、12…ダンパ、13…可変絞り機構、131…バルブ、132…アクチュエータ、14…前輪側スタビライザ、15…後輪側スタビライザ、20…電気制御装置(減衰力制御装置)、211…後輪近似制御部(第1要求減衰力計算手段)、212…前輪近似制御部(第2要求減衰力計算手段)、213…旋回状態判定部、214…統合制御部(減衰力制御手段)、221FR…右前輪側バネ上加速度センサ、221FL…左前輪側バネ上加速度センサ、221RR…右後輪側バネ上加速度センサ、221RL…左後輪側バネ上加速度センサ、228…ヨーレートセンサ(ヨーレート検出センサ)、21…サスペンションECU、HA…バネ上部材、LA…バネ下部材
Claims (10)
- 車両のバネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御する減衰力制御装置において、
バネ上部材の左右前輪位置に取付けられた2個の前輪側サスペンション装置またはバネ上部材の左右後輪位置に取付けられた2個の後輪側サスペンション装置が1個の仮想サスペンション装置に置き換えられた車両の運動を表す3輪モデルから導出されるバネ上部材の上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前記3輪モデルに表される3個のサスペンション装置により発生されるべき制御目標の減衰力である要求減衰力を計算し、計算した要求減衰力のうち前記仮想サスペンション装置についての要求減衰力を、その仮想サスペンション装置に置き換えられた2個のサスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算する要求減衰力計算手段と、
前記要求減衰力計算手段により計算された要求減衰力に基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御する減衰力制御手段と、
を備えることを特徴とする、減衰力制御装置。 - 請求項1に記載の減衰力制御装置において、
前記要求減衰力計算手段は、
前記3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算するモデル要求減衰力計算手段と、前記モデル要求減衰力計算手段により計算された要求減衰力のうち前記仮想サスペンション装置についての要求減衰力を、その仮想サスペンション装置に置き換えられた2個のサスペンション装置についての要求減衰力に分配する要求減衰力分配手段と、を備えることを特徴とする、減衰力制御装置。 - 請求項1または2に記載の減衰力制御装置において、
前記3輪モデルは、前記2個の後輪側サスペンション装置が1個の後輪側仮想サスペンション装置に置き換えられた車両の運動を表す後輪近似3輪モデルであることを特徴とする、減衰力制御装置。 - 請求項1または2に記載の減衰力制御装置において、
前記3輪モデルは、前記2個の前輪側サスペンション装置が1個の前輪側仮想サスペンション装置に置き換えられた車両の運動を表す前輪近似3輪モデルであることを特徴とする、減衰力制御装置。 - 請求項1または2に記載の減衰力制御装置において、
前記要求減衰力計算手段は、
前記2個の後輪側サスペンション装置が1個の後輪側仮想サスペンション装置に置き換えられた車両の運動を表す後輪近似3輪モデルから導出されるバネ上部材の上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前記後輪近似3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算し、計算した要求減衰力のうち前記後輪側仮想サスペンション装置についての要求減衰力を、前記2個の後輪側サスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算する第1要求減衰力計算手段と、
前記2個の前輪側サスペンション装置が1個の前輪側仮想サスペンション装置に置き換えられた車両の運動を表す前輪近似3輪モデルから導出されるバネ上部材の上下運動、ロール運動およびピッチ運動に基づいて設計される制御システムに非線形H∞制御理論を適用することにより、前記前輪近似3輪モデルに表される3個のサスペンション装置についての要求減衰力を計算し、計算した要求減衰力のうち前記前輪側仮想サスペンション装置についての要求減衰力を、前記2個の前輪側サスペンション装置についての要求減衰力に分配することにより、バネ上部材の各輪位置に取付けられた4個のサスペンション装置についての要求減衰力を計算する第2要求減衰力計算手段と、を備え、
前記減衰力制御手段は、前記第1要求減衰力計算手段および第2要求減衰力計算手段のいずれか一方により計算された要求減衰力に基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御することを特徴とする、減衰力制御装置。 - 請求項5に記載の減衰力制御装置において、
前記減衰力制御手段は、車両の旋回状態に基づいて、前記第1要求減衰力計算手段により計算された要求減衰力と前記第2要求減衰力計算手段により計算された要求減衰力のいずれか一方を選択する要求減衰力選択手段を備え、前記要求減衰力選択手段により選択された要求減衰力に基づいて、バネ上部材の各輪位置に取付けられた4個のサスペンション装置の減衰力を制御することを特徴とする、減衰力制御装置。 - 請求項6に記載の減衰力制御装置において、
前記要求減衰力選択手段は、車両の旋回状態がアンダーステア状態であるときには前記第1要求減衰力計算手段により計算された要求減衰力を選択し、車両の旋回状態がオーバーステア状態であるときには前記第2要求減衰力計算手段により計算された要求減衰力を選択することを特徴とする、減衰力制御装置。 - 請求項6または7に記載の減衰力制御装置において、
車両旋回時に発生する実ヨーレートを検出するヨーレート検出センサと、
車速および舵角に基づいて目標ヨーレートを計算する目標ヨーレート計算手段と、
前記ヨーレート検出センサにより検出された実ヨーレートと前記目標ヨーレート計算手段により計算された目標ヨーレートとの差を表すヨーレート偏差に基づいて、車両の旋回状態がアンダーステア状態であるかオーバーステア状態であるかを判定する旋回状態判定手段と、を更に備え、
前記要求減衰力選択手段は、前記旋回状態判定手段により判定された車両の旋回状態に基づいて、要求減衰力を選択することを特徴とする、減衰力制御装置。 - 請求項5に記載の減衰力制御装置において、
右前輪位置におけるバネ上部材の上下加速度を検出する右前輪側バネ上加速度センサと、左前輪位置におけるバネ上部材の上下加速度を検出する左前輪側バネ上加速度センサと、右後輪位置におけるバネ上部材の上下加速度を検出する右後輪側バネ上加速度センサと、左後輪位置におけるバネ上部材の上下加速度を検出する左後輪側バネ上加速度センサと、を備え、
前記減衰力制御手段は、前記右前輪側バネ上加速度センサおよび前記左前輪側バネ上加速度センサのいずれか一方が異常であるときには、前記第2要求減衰力計算手段により計算された要求減衰力に基づいてバネ上部材の各輪位置に取付けられたサスペンション装置の減衰力を制御し、前記右後輪側バネ上加速度センサおよび前記左後輪側バネ上加速度センサのいずれか一方が異常であるときには、前記第1要求減衰力計算手段により計算された要求減衰力に基づいてバネ上部材の各輪位置に取付けられたサスペンション装置の減衰力を制御することを特徴とする、減衰力制御装置。 - 請求項1に記載の減衰力制御装置において、
前記仮想サスペンション装置が、置き換えられる2個のサスペンション装置がバネ上部材に取付けられている位置の中間位置にてバネ上部材に取付けられるように、前記3輪モデルが設計されていることを特徴とする、減衰力制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009098596A JP2010247633A (ja) | 2009-04-15 | 2009-04-15 | 減衰力制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009098596A JP2010247633A (ja) | 2009-04-15 | 2009-04-15 | 減衰力制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010247633A true JP2010247633A (ja) | 2010-11-04 |
Family
ID=43310512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009098596A Pending JP2010247633A (ja) | 2009-04-15 | 2009-04-15 | 減衰力制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010247633A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013049362A (ja) * | 2011-08-31 | 2013-03-14 | Hitachi Automotive Systems Ltd | サスペンション制御装置 |
| CN116512844A (zh) * | 2023-03-31 | 2023-08-01 | 长城汽车股份有限公司 | 一种减振器阻尼调节方法、装置、车辆和设备 |
| CN116834493A (zh) * | 2023-05-11 | 2023-10-03 | 中国人民解放军火箭军工程大学 | 一种安装油气悬架的重型车辆整车半主动阻尼协调控制方法 |
| CN119928487A (zh) * | 2025-03-19 | 2025-05-06 | 东风汽车集团股份有限公司 | 一种车辆阻尼协同的控制方法及系统 |
-
2009
- 2009-04-15 JP JP2009098596A patent/JP2010247633A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013049362A (ja) * | 2011-08-31 | 2013-03-14 | Hitachi Automotive Systems Ltd | サスペンション制御装置 |
| CN116512844A (zh) * | 2023-03-31 | 2023-08-01 | 长城汽车股份有限公司 | 一种减振器阻尼调节方法、装置、车辆和设备 |
| CN116834493A (zh) * | 2023-05-11 | 2023-10-03 | 中国人民解放军火箭军工程大学 | 一种安装油气悬架的重型车辆整车半主动阻尼协调控制方法 |
| CN119928487A (zh) * | 2025-03-19 | 2025-05-06 | 东风汽车集团股份有限公司 | 一种车辆阻尼协同的控制方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11958329B2 (en) | Roll vibration damping control system for vehicle, target roll moment computing method therefor, and non-transitory computer-readable storage medium | |
| JP5809506B2 (ja) | 車両運動制御装置及びサスペンション制御装置 | |
| JP5571519B2 (ja) | 車体姿勢制御装置 | |
| CN109715421B (zh) | 悬架控制装置 | |
| CN102307739B (zh) | 车辆的稳定器控制装置 | |
| JP4670800B2 (ja) | 車両のロール剛性制御装置 | |
| US8838336B2 (en) | Vehicle body attitude control apparatus | |
| JP6829422B2 (ja) | 車両用制振制御装置 | |
| EP1800915B1 (en) | Damping force control apparatus for vehicle | |
| CN111137096B (zh) | 用于可变阻尼力阻尼器的控制系统 | |
| JP6245217B2 (ja) | 車両の状態量推定装置 | |
| CN113071282B (zh) | 一种车辆调节方法及装置 | |
| JP2021008197A (ja) | 車両制御装置 | |
| JP4876924B2 (ja) | 車両のロール制御装置 | |
| JP2010247633A (ja) | 減衰力制御装置 | |
| JP5316279B2 (ja) | 車両振動抑制装置 | |
| JP2020117196A (ja) | 車両運動状態推定装置 | |
| JP2008143259A (ja) | 制駆動力制御装置、自動車及び制駆動力制御方法 | |
| JP4706832B2 (ja) | 車輪のタイヤグリップ度推定装置 | |
| JP2009078759A (ja) | 車両用サスペンション制御装置 | |
| JP2010284985A (ja) | 減衰力制御装置 | |
| JP2010260484A (ja) | 減衰力制御装置 | |
| JP2009078758A (ja) | 車両用サスペンション制御装置 | |
| JP2010006282A (ja) | 車両制御装置 | |
| JP2007001501A (ja) | 車両のキャンバ角制御装置およびキャンバ角制御方法 |