JP2011069883A - 内視鏡装置 - Google Patents
内視鏡装置 Download PDFInfo
- Publication number
- JP2011069883A JP2011069883A JP2009218910A JP2009218910A JP2011069883A JP 2011069883 A JP2011069883 A JP 2011069883A JP 2009218910 A JP2009218910 A JP 2009218910A JP 2009218910 A JP2009218910 A JP 2009218910A JP 2011069883 A JP2011069883 A JP 2011069883A
- Authority
- JP
- Japan
- Prior art keywords
- endoscope apparatus
- grip
- unit
- arm
- gripping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003780 insertion Methods 0.000 claims abstract description 32
- 230000037431 insertion Effects 0.000 claims abstract description 32
- 210000003813 thumb Anatomy 0.000 claims abstract description 25
- 210000003811 finger Anatomy 0.000 claims abstract description 15
- 210000000245 forearm Anatomy 0.000 claims description 37
- 230000007246 mechanism Effects 0.000 claims description 13
- 210000000707 wrist Anatomy 0.000 abstract description 5
- 238000005452 bending Methods 0.000 description 14
- 230000004048 modification Effects 0.000 description 14
- 238000012986 modification Methods 0.000 description 14
- 210000003857 wrist joint Anatomy 0.000 description 11
- 238000003384 imaging method Methods 0.000 description 10
- 230000005484 gravity Effects 0.000 description 8
- 238000005286 illumination Methods 0.000 description 5
- 238000013461 design Methods 0.000 description 3
- 210000004932 little finger Anatomy 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000000284 resting effect Effects 0.000 description 3
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 210000004247 hand Anatomy 0.000 description 2
- 229920002803 thermoplastic polyurethane Polymers 0.000 description 2
- 210000000623 ulna Anatomy 0.000 description 2
- 0 CCNC(C)C* Chemical compound CCNC(C)C* 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 229920003051 synthetic elastomer Polymers 0.000 description 1
- 239000005061 synthetic rubber Substances 0.000 description 1
Images








Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Abstract
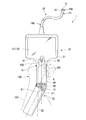
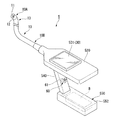
【解決手段】被検体の内部に先端10Aから挿入される挿入部10と、挿入部10の基端10Bに設けられた操作部20と、操作部20の外面に露出するように設けられた表示部30と、一端41が操作部20に位置し他端42が操作部20の外側に向かって延びる棒状の把持部40と、表示部30が設けられた側の操作部20の外面で表示部30と把持部40との間に設けられた入力部60と、把持部40の他端42から延びて設けられた腕あて部50と、を備え、入力部60に親指が添えられるとともに入力部60が位置する側と径方向で反対側の把持部40の外面に親指以外の指が添えられるように把持部40が手で把持されたときに、腕あて部50は前記手と同側の前腕で鉛直下方側の外面に向かって延びて設けられている。
【選択図】図1
Description
本発明の内視鏡装置は、先端と基端とを有し、被検体の内部に前記先端から挿入される挿入部と、前記挿入部の前記基端に設けられた操作部と、前記操作部の外面に露出するように設けられ、前記被検体の前記内部の像を表示する表示部と、一端が前記操作部に位置し他端が前記操作部の外側に向かって延びる棒状の把持部と、前記表示部が設けられた側の前記操作部の外面で前記表示部と前記把持部との間に設けられ、前記挿入部を操作するための入力を行う入力部と、前記把持部の前記他端から延びて設けられた腕あて部と、を備え、前記入力部に親指が添えられるとともに前記入力部が位置する側と径方向で反対側の前記把持部の外面に親指以外の指が添えられるように前記把持部が手で把持されたときに、前記腕あて部は前記手と同側の前腕で鉛直下方側の外面に向かって延びて設けられていることを特徴としている。
以下、本発明の第1実施形態の内視鏡装置について図1及び図2を参照して説明する。
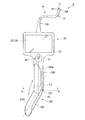
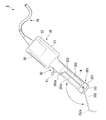
図1は、本実施形態の内視鏡装置1を示す平面図である。また、図2は、内視鏡装置1を示す側面図である。
挿入部10は、被検体の内部に挿入される部分であり、管状の部材で形成されている。挿入部10の先端10Aの側には、撮像部11及び照明部12と、挿入部10の先端の向きを所望の方向に変化させるための湾曲部13とが設けられている。
また、図2に示すように、腕あて本体部52は長さαだけ把持部40から手元側へ突出して設けられているので、腕あて本体部52を備えていない場合と比較して内視鏡装置1の重心位置は使用者の手(例えば左手100)に近い側に位置している。
また、バッテリーBは、操作部20の中央部に位置する把持部40の位置で把持部40の内部に配置されている。把持部40の長手方向の端部の一方に表示部30が設けられ、他方に腕あて本体部52が設けられているので、把持部40を挟んで操作部20の長手方向の両側に重量物が位置するいわゆるダンベル状の重量配分になっている。このため、把持部40を使用者が把持したときにバランスをとりやすくなっている。
内視鏡装置1の使用者は、把持部40を手に持って内視鏡装置1を使用する。例えば、図1に示すように、使用者の左手100によって把持部40が把持される場合には、使用者の左手100の親指102は入力部60のジョイスティック61に添えられる。さらに、使用者の左手100の親指102以外の指(以下「他の指101」)は、把持部40の下面側(表示部30及び入力部60が向く側と反対の側)に添えられる。このとき、把持部40の長手軸X1に交差する方向に使用者の他の指101が向いている。
また、腕あて本体部52において当接領域52aが弾性を有しているので、内視鏡装置1を長時間使用していても使用者の腕に対する違和感を緩和することができる。
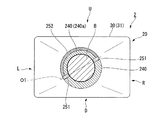
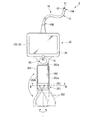
次に、本発明の第2実施形態の内視鏡装置について図3から図5を参照して説明する。なお、以下に説明する各実施形態において、上述した第1実施形態で説明した内視鏡装置と構成を共通とする箇所には同一符号を付けて、説明を省略することにする。図3は、本実施形態の内視鏡装置を示す平面図である。また、図4は腕あて部を折りたたんだ状態の、図3のA−A線における断面図である。図5は本実施形態の内視鏡装置を示す右側面図である。
図3ないし図5に示すように、内視鏡装置2は、把持部40に代えて設けられた把持部240と、腕あて部50に代えて設けられた腕あて部250とを備えている点で第1実施形態の内視鏡装置1と構成が異なっている。
把持部240は筒状に形成されており、把持部240の内部には、例えば表示部30などを駆動するための駆動電力を供給するためのバッテリーBが配置されている。また、把持部240の外壁において径方向に対向する二箇所のそれぞれには、円柱状の回動軸部材251が一対取り付けられている。
内視鏡装置2を使用していない場合、及び内視鏡装置2の把持部240を把持して内視鏡装置2を持つための十分な力がある使用者が内視鏡装置2の把持部240を把持する場合には、内視鏡装置2は、把持部240の格納部240aに腕あて本体部252が被せられた位置関係にセットされる。腕あて本体部252が格納部240aに格納されている状態では、図4に示すように把持部240と腕あて部250とが段差なく隣り合う位置関係になっている。
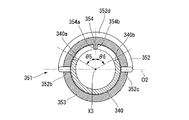
次に、本発明の第3実施形態の内視鏡装置について図6から図8を参照して説明する。図6は、本実施形態の内視鏡装置の平面図である。また、図7は、本実施例の内視鏡装置の右側面図である。また、図8は、図6のB−B線における断面図である。
例えば内視鏡装置3の収納時など内視鏡装置3が未使用状態の場合には、把持部340の長手軸X3に沿って腕あて本体部352が延びて把持部340が腕あて本体部352に覆われるような位置関係にある。
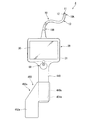
次に、本発明の第4実施形態の内視鏡装置について図9及び図10を参照して説明する。図9は、本実施形態の内視鏡装置を平面図である。また、図10は本実施形態の内視鏡装置の右側面図である。
さらに、腕あて部450における開口部451の内部には、腕あて部450が把持部440に挿入された状態で隆起部440a、440bが嵌合する凹部(被係合部)451a、451bが形成されている。腕あて部450の材質は、少なくとも開口部451においては弾性を有していることが好ましく、また開口部451と反対側の端部においては柔軟性を有していることが好ましい。
内視鏡装置4の収納時などには、腕あて部450は把持部440から取り外された状態にある。内視鏡装置4を使用する際には、使用者は腕あて部450を開口部451側から把持部440に被せ、隆起部440a、440bのそれぞれを凹部451a、451bに嵌合させる。
内視鏡装置4の使用者は、上述の各実施形態で説明した把持部の持ち方と同様に内視鏡装置2の把持部440を左手100で把持する。このとき、腕あて部450の当接領域452aは使用者の左手100の前腕103の尺側の外面103aに当接して内視鏡装置4の重量の一部は使用者の前腕103の外面103aで支持される。
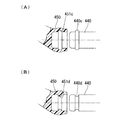
以下では、本実施形態の内視鏡装置4の変形例1の構成について図11を参照して説明する。図11(A)は本変形例の内視鏡装置の一部の構成を示す部分断面図である。図11(B)は、本変形例の他の構成例の内視鏡装置の一部の構成を示す部分断面図である。
上述の第4実施形態では、把持部440と腕あて部450との間は隆起部440a、440bと凹部451a、451bとが嵌合することによって連結されている構成を説明したが、本変形例では、図11(A)に示すように把持部440の周方向に延びる凸条部440cと、腕あて部450の開口部451の内部に周方向に延びる溝部451cとが、互いに嵌合可能に形成されている。
この場合、把持部440と腕あて部450との間で引っかかる部分の面積が上述の第4実施形態の構成よりも大きいので、把持部440と腕あて部450との間の接続がより確実になる。
以下では、本実施形態の内視鏡装置4の変形例2の構成について図12を参照して説明する。図12は、本変形例の内視鏡装置を示す平面図である。
図12に示すように、本変形例では内視鏡装置4の把持部440には隆起部440a、440bは形成されておらず、把持部440は棒状である。
次に、本発明の第5実施形態の内視鏡装置について図13ないし図15を参照して説明する。図13は、本実施形態の内視鏡装置を示す斜視図である。また、図14は本実施形態の内視鏡装置を示す右側面図である。また、図15は、本実施形態の内視鏡装置の使用時の一形態を示す斜視図である。
内視鏡装置5は、操作部520と腕あて部550とが平行に延びた位置関係にある第一形状(図13及び図14参照)と、操作部520が延びる方向と腕あて部550が延びる方向とが交差するようにくの字状の位置関係にある第二形状(図15参照)との二つの異なる形状となるように相互に変形可能である。
バンド153は、腕あて本体部52に一端が固定され、前腕103の外形に沿う湾曲形状に形成された接触壁部153a、153bを有している。接触壁部153bは弾性を有している。このため、接触壁部153bの突出端153cと接触壁部153aとの隙間を押し広げて前腕103を挿入すると、接触壁部153bの復元力によって接触壁部153bは前腕103の外面に接触するように変形する。
これにより、接触壁部153aと接触壁部153bとによって前腕103と腕あて本体部52とを連結することができる。このような構成であっても、内視鏡装置1を確実に支持することができる。
10 挿入部
20、520 操作部
30 表示部
40、240、340、440、540 把持部
50、250、350、450、550 腕あて部
51 切替機構
52、252、352、452、552 腕あて本体部
52a、252a、352a、452a、552a 当接領域
60 入力部
Claims (9)
- 先端と基端とを有し、被検体の内部に前記先端から挿入される挿入部と、
前記挿入部の前記基端に設けられた操作部と、
前記操作部の外面に露出するように設けられ、前記被検体の前記内部の像を表示する表示部と、
一端が前記操作部に位置し他端が前記操作部の外側に向かって延びる棒状の把持部と、
前記表示部が設けられた側の前記操作部の外面で前記表示部と前記把持部との間に設けられ、前記挿入部を操作するための入力を行う入力部と、
前記把持部の前記他端から延びて設けられた腕あて部と、
を備え、
前記入力部に親指が添えられるとともに前記入力部が位置する側と径方向で反対側の前記把持部の外面に親指以外の指が添えられるように前記把持部が手で把持されたときに、前記腕あて部は前記手と同側の前腕で鉛直下方側の外面に向かって延びて設けられている
内視鏡装置。 - 前記腕あて部は、前記前腕における前記外面に対向して前記外面に当接する当接領域を有する請求項1に記載の内視鏡装置。
- 前記腕あて部が前記把持部から突出する方向は、前記把持部を前記把持している前記手と同側の前腕が延びる方向に対して交差する方向である請求項1または2に記載の内視鏡装置。
- 前記把持部と前記腕あて部との間には、前記把持部の長手軸に直交する回動軸回りに前記把持部と前記腕あて部とを相対回動可能に連結する回動軸部材を有する請求項1に記載の内視鏡装置。
- 前記腕あて部は、前記把持部の前記他端から前記突出する向きから、前記把持部の長手軸方向に一端側へ延びる向きになるまで前記回動軸回りに回動可能である請求項4に記載の内視鏡装置。
- 前記腕あて部が前記把持部の長手軸方向に一端側へ延びる向きにあるときに、前記腕あて部は前記把持部の外表面の形状に沿って前記外表面の少なくとも一部を覆っている請求項4または5に記載の内視鏡装置。
- 前記腕あて部は、前記把持部が把持される前記手の左右に応じて前記突出する方向を切り替える切替機構を有する請求項1または4に記載の内視鏡装置。
- 前記切替機構は、前記把持部の長手軸回りに前記把持部と前記腕あて部とを相対回動可能に連結する可動連結部を有する請求項7に記載の内視鏡装置。
- 前記把持部は、前記他端において前記腕あて部が係合する被係合部を有し、
前記腕あて部は、前記被係合部に対して着脱自在に係合する係合部を有する、
請求項1に記載の内視鏡装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009218910A JP5378129B2 (ja) | 2009-09-24 | 2009-09-24 | 内視鏡装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009218910A JP5378129B2 (ja) | 2009-09-24 | 2009-09-24 | 内視鏡装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011069883A true JP2011069883A (ja) | 2011-04-07 |
| JP5378129B2 JP5378129B2 (ja) | 2013-12-25 |
Family
ID=44015253
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009218910A Expired - Fee Related JP5378129B2 (ja) | 2009-09-24 | 2009-09-24 | 内視鏡装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5378129B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013109016A (ja) * | 2011-11-17 | 2013-06-06 | Olympus Corp | 内視鏡装置 |
| JP5508584B1 (ja) * | 2013-06-27 | 2014-06-04 | 信一 小屋野 | 把手を備える器具 |
| JP2015147097A (ja) * | 2015-05-13 | 2015-08-20 | オリンパス株式会社 | 内視鏡装置 |
| WO2016002243A1 (ja) * | 2014-07-02 | 2016-01-07 | オリンパス株式会社 | 内視鏡 |
| JP2022528173A (ja) * | 2019-04-11 | 2022-06-08 | ボストン サイエンティフィック リミテッド | 医療機器用グリップ |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58192632U (ja) * | 1982-06-16 | 1983-12-21 | キヤノン株式会社 | ハンデイカメラ等の保持装置 |
| JPH07289121A (ja) * | 1994-04-22 | 1995-11-07 | Ryobi Ltd | 釣竿用肘当て |
| JP2004109222A (ja) * | 2002-09-13 | 2004-04-08 | Olympus Corp | 内視鏡装置 |
| JP2004305074A (ja) * | 2003-04-04 | 2004-11-04 | Shimano Inc | 釣竿 |
| US20050129108A1 (en) * | 2003-01-29 | 2005-06-16 | Everest Vit, Inc. | Remote video inspection system |
| JP2006068453A (ja) * | 2004-09-06 | 2006-03-16 | Olympus Corp | ドラム機構を有する内視鏡装置 |
| JP2006204582A (ja) * | 2005-01-28 | 2006-08-10 | Olympus Corp | 内視鏡装置 |
| US20070156021A1 (en) * | 2005-09-14 | 2007-07-05 | Bradford Morse | Remote imaging apparatus having an adaptive lens |
| US20070225931A1 (en) * | 2006-03-27 | 2007-09-27 | Ge Inspection Technologies, Lp | Inspection apparatus for inspecting articles |
| JP2008012245A (ja) * | 2006-07-03 | 2008-01-24 | Koji Nagao | フライパン用腕支え具 |
-
2009
- 2009-09-24 JP JP2009218910A patent/JP5378129B2/ja not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58192632U (ja) * | 1982-06-16 | 1983-12-21 | キヤノン株式会社 | ハンデイカメラ等の保持装置 |
| JPH07289121A (ja) * | 1994-04-22 | 1995-11-07 | Ryobi Ltd | 釣竿用肘当て |
| JP2004109222A (ja) * | 2002-09-13 | 2004-04-08 | Olympus Corp | 内視鏡装置 |
| US20050129108A1 (en) * | 2003-01-29 | 2005-06-16 | Everest Vit, Inc. | Remote video inspection system |
| JP2004305074A (ja) * | 2003-04-04 | 2004-11-04 | Shimano Inc | 釣竿 |
| JP2006068453A (ja) * | 2004-09-06 | 2006-03-16 | Olympus Corp | ドラム機構を有する内視鏡装置 |
| JP2006204582A (ja) * | 2005-01-28 | 2006-08-10 | Olympus Corp | 内視鏡装置 |
| US20070156021A1 (en) * | 2005-09-14 | 2007-07-05 | Bradford Morse | Remote imaging apparatus having an adaptive lens |
| US20070225931A1 (en) * | 2006-03-27 | 2007-09-27 | Ge Inspection Technologies, Lp | Inspection apparatus for inspecting articles |
| JP2008012245A (ja) * | 2006-07-03 | 2008-01-24 | Koji Nagao | フライパン用腕支え具 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013109016A (ja) * | 2011-11-17 | 2013-06-06 | Olympus Corp | 内視鏡装置 |
| JP5508584B1 (ja) * | 2013-06-27 | 2014-06-04 | 信一 小屋野 | 把手を備える器具 |
| WO2016002243A1 (ja) * | 2014-07-02 | 2016-01-07 | オリンパス株式会社 | 内視鏡 |
| JP2015147097A (ja) * | 2015-05-13 | 2015-08-20 | オリンパス株式会社 | 内視鏡装置 |
| JP2022528173A (ja) * | 2019-04-11 | 2022-06-08 | ボストン サイエンティフィック リミテッド | 医療機器用グリップ |
| JP7570770B2 (ja) | 2019-04-11 | 2024-10-22 | ボストン サイエンティフィック メディカル デバイス リミテッド | 医療機器用グリップ |
| US12262867B2 (en) | 2019-04-11 | 2025-04-01 | Boston Scientific Medical Device Limited | Grips for medical devices |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5378129B2 (ja) | 2013-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5378129B2 (ja) | 内視鏡装置 | |
| US8287449B2 (en) | Endoscope device | |
| CN102711584B (zh) | 内窥镜 | |
| US8581971B2 (en) | Endoscope system | |
| EP3078318B1 (en) | Endoscope | |
| CN102858223B (zh) | 操作机构、内窥镜装置及导引导管 | |
| US20160242629A1 (en) | Endoscope | |
| US10918267B2 (en) | Endoscope | |
| US20170325903A1 (en) | Manipulator | |
| US20190053690A1 (en) | Endoscope | |
| JP6017742B1 (ja) | 内視鏡操作部および内視鏡 | |
| JP2018512295A (ja) | リモートアクセスツールの為の取り付け装置 | |
| US20190014972A1 (en) | Operation unit | |
| JP6043035B2 (ja) | 内視鏡システム | |
| EP3192426A1 (en) | Bending operation device and endoscope | |
| JP5663155B2 (ja) | 内視鏡装置 | |
| JP2016221025A (ja) | 内視鏡装置 | |
| JP2012100683A (ja) | 内視鏡の湾曲操作装置、及びそれを用いた内視鏡装置 | |
| Soetikno et al. | Holding and manipulating the endoscope: A user's guide | |
| US20220240753A1 (en) | Insertion instrument | |
| JP2013039188A (ja) | アタッチメント及び内視鏡システム | |
| JP5567766B2 (ja) | 内視鏡 | |
| KR20020021138A (ko) | 컴퓨터 입력 장치와 그에 대한 손잡이 | |
| CN108697305B (zh) | 弯曲操作装置和应用该弯曲操作装置的内窥镜 | |
| US20210353133A1 (en) | Endoscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120810 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130823 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130925 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5378129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees | ||
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |