JP2011121402A - 表示装置、表示方法及び移動体 - Google Patents
表示装置、表示方法及び移動体 Download PDFInfo
- Publication number
- JP2011121402A JP2011121402A JP2009278671A JP2009278671A JP2011121402A JP 2011121402 A JP2011121402 A JP 2011121402A JP 2009278671 A JP2009278671 A JP 2009278671A JP 2009278671 A JP2009278671 A JP 2009278671A JP 2011121402 A JP2011121402 A JP 2011121402A
- Authority
- JP
- Japan
- Prior art keywords
- viewer
- light beam
- moving body
- vehicle
- eye
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/231—Head-up displays [HUD] characterised by their arrangement or structure for integration into vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/233—Head-up displays [HUD] controlling the size or position in display areas of virtual images depending on the condition of the vehicle or the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/60—Instruments characterised by their location or relative disposition in or on vehicles
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/001—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/33—Illumination features
- B60K2360/334—Projection means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0129—Head-up displays characterised by optical features comprising devices for correcting parallax
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0149—Head-up displays characterised by mechanical features
- G02B2027/0154—Head-up displays characterised by mechanical features with movable elements
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2340/00—Aspects of display data processing
- G09G2340/04—Changes in size, position or resolution of an image
- G09G2340/0464—Positioning
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2340/00—Aspects of display data processing
- G09G2340/14—Solving problems related to the presentation of information to be displayed
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Computer Hardware Design (AREA)
- Theoretical Computer Science (AREA)
- Instrument Panels (AREA)
- Control Of Indicators Other Than Cathode Ray Tubes (AREA)
- Controls And Circuits For Display Device (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
Abstract
【課題】目の位置が移動しても観視し易いHUD型の表示装置、表示方法及び移動体を提供する。
【解決手段】移動体に搭載され、映像を含む光束を前記移動体のフロントガラス部に反射させて前記移動体に搭乗する観視者に向けて投影する表示装置であって、前記光束を前記観視者の片目に向けて投影する映像投影部と、前記映像投影部を制御して、前記観視者の位置における前記光束の投影位置を制御する制御部と、を備える表示装置が提供される。制御部は、移動体の進行方向が右方向に変化するときに、移動体が直進するときの光束の投影位置よりも観視者の左目から右目に向かう方向に光束の投影位置を移動させ、移動体の進行方向が左方向に変化するときに、移動体が直進するときの光束の投影位置よりも観視者の前記右目から前記左目に向かう方向に光束の投影位置を移動させる。
【選択図】図1
【解決手段】移動体に搭載され、映像を含む光束を前記移動体のフロントガラス部に反射させて前記移動体に搭乗する観視者に向けて投影する表示装置であって、前記光束を前記観視者の片目に向けて投影する映像投影部と、前記映像投影部を制御して、前記観視者の位置における前記光束の投影位置を制御する制御部と、を備える表示装置が提供される。制御部は、移動体の進行方向が右方向に変化するときに、移動体が直進するときの光束の投影位置よりも観視者の左目から右目に向かう方向に光束の投影位置を移動させ、移動体の進行方向が左方向に変化するときに、移動体が直進するときの光束の投影位置よりも観視者の前記右目から前記左目に向かう方向に光束の投影位置を移動させる。
【選択図】図1
Description
本発明は、表示装置、表示方法及び移動体に関する。
車載用のヘッドアップディスプレイ(HUD:Head-Up Display)においては、ナビゲーション情報等の表示情報をフロントガラスに投影して、外界情報と表示情報とを同時に視認する。両眼視のHUDにおいては、外界情報と表示情報とで両眼視差が発生し、見難い表示となる。
これに対し、片目で表示を観視する単眼用の表示装置が提案されている(例えば、特許文献1参照)。これによれば、背景にマッチした奥行き位置に、表示オブジェクトの虚像を知覚させることができ、奥行き感や立体感が増強された表示を提供できる。
このような単眼視の表示装置は、例えば、車載用のHUDに応用でき、外界情報と表示情報とを同時に視認したときにおいても両眼視差は発生せず、所望の奥行き位置に表示を呈示して知覚させることができる。
また、このように片目で観視する表示装置は、車載用のHUDの他、ゲームなどのアミューズメント用途にも応用でき、奥行き感や立体感が増強され、高臨場感の表示を提供できる。
単眼用の表示装置においては、表示が両目で常時観視されないように表示内容を含む光束の投影領域が狭く制御される。このため、観視者の目の位置が移動しても観視し易くするために、改良の余地がある。
本発明は、目の位置が移動しても観視し易いHUD型の表示装置、表示方法及び移動体を提供する。
本発明の一態様によれば、移動体に搭載され、映像を含む光束を前記移動体のフロントガラス部に反射させて前記移動体に搭乗する観視者に向けて投影する表示装置であって、前記光束を前記観視者に向けて投影する映像投影部と、前記映像投影部を制御して、前記観視者の位置における前記光束の投影位置を制御する制御部と、を備え、前記制御部は、前記移動体の進行方向が右方向に変化するときに、前記移動体が直進するときの前記光束の投影位置よりも前記観視者の左目から右目に向かう方向に前記光束の投影位置を移動させ、前記移動体の進行方向が左方向に変化するときに、前記移動体が直進するときの前記光束の前記投影位置よりも前記観視者の前記右目から前記左目に向かう方向に前記光束の前記投影位置を移動させることを特徴とする表示装置が提供される。
本発明の別の一態様によれば、映像を含む光束を移動体のフロントガラス部に反射させて前記移動体に搭乗する観視者に向けて投影する表示方法であって、前記移動体の進行方向が右方向に変化するときに、前記移動体が直進するときの前記光束の投影位置よりも前記観視者の左目から右目に向かう方向に前記光束の投影位置を移動させ、前記移動体の進行方向が左方向に変化するときに、前記移動体が直進するときの前記光束の前記投影位置よりも前記観視者の前記右目から前記左目に向かう方向に前記光束の前記投影位置を移動させることを特徴とする表示方法が提供される。
本発明の別の一態様によれば、上記の表示装置と、前記表示装置から出射される前記光束を前記観視者に向けて反射させるフロントガラス部と、を備えたことを特徴とする移動体が提供される。
本発明によれば、目の位置が移動しても観視し易いHUD型の表示装置、表示方法及び移動体が提供される。
以下に、本発明の各実施の形態について図面を参照しつつ説明する。
なお、本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
なお、本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
(第1の実施の形態)
本発明の第1の実施形態に係る表示装置は、片目で観視する表示装置であり、車載用のHUDの他、ドライビングシミュレータやフライトシミュレータなどのシミュレータ、さらには、ゲームなどのアミューズメント用途にも適用でき、奥行き感や立体感が増強され、高臨場感の表示を提供できる。以下では、例として本実施形態に係る表示装置が、車載用の表示装置であるHUDとして応用される場合として説明する。
本発明の第1の実施形態に係る表示装置は、片目で観視する表示装置であり、車載用のHUDの他、ドライビングシミュレータやフライトシミュレータなどのシミュレータ、さらには、ゲームなどのアミューズメント用途にも適用でき、奥行き感や立体感が増強され、高臨場感の表示を提供できる。以下では、例として本実施形態に係る表示装置が、車載用の表示装置であるHUDとして応用される場合として説明する。
図1は、第1の実施形態に係る表示装置の動作を例示する模式図である。
図2は、第1の実施形態に係る表示装置の別の動作を例示する模式図である。
図3は、第1の実施形態に係る表示装置の構成を例示する模式図である。
まず、図3により、本実施形態に係る表示装置10の構成の概要について説明する。
図2は、第1の実施形態に係る表示装置の別の動作を例示する模式図である。
図3は、第1の実施形態に係る表示装置の構成を例示する模式図である。
まず、図3により、本実施形態に係る表示装置10の構成の概要について説明する。
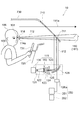
図3に表したように、表示装置10は、車両730(移動体)に搭載される。表示装置10は、映像を含む光束112を、車両730のフロントガラス部710に反射させて、車両730に搭乗する観視者100に向けて投影する。フロントガラス部710は、車両730のフロントガラスを含む。また、フロントガラス部710は、例えば、車両730のフロントガラスに設けられる反射部711(例えばコンバイナ)を含んでも良い。この場合には、光束112は、車両730のフロントガラスに設けられる反射部711によって反射されて、観視者100に向けて反射される。なお、反射部711は、フロントガラスよりも車両730の室内側に、フロントガラスから離間して設けられても良い。反射部711がフロントガラスから離間して設けられる場合も、反射部711は、フロントガラス部710の一部と見なされる。
そして、表示装置10は、映像投影部115と、制御部250と、を備える。
映像投影部115は、映像を含む光束112を観視者100の片目101に向けて投影する。制御部250は、映像投影部115を制御して、観視者100の位置における光束112の投影位置114aを制御する。
映像投影部115は、映像を含む光束112を観視者100の片目101に向けて投影する。制御部250は、映像投影部115を制御して、観視者100の位置における光束112の投影位置114aを制御する。
なお、光束112に含まれる映像は、例えば表示オブジェクト180を含む。表示オブジェクト180は、表示装置10が観視者100に呈示する映像に設けられるものであり、例えば、表示装置10が搭載される車両730の運行情報に関する、進行方向を示す「矢印」等の各種の表示内容である。
映像投影部115から出射された光束112は、フロントガラス部710で反射され、観視者100の頭部105に入射する。このとき、光束112の発散角が制御されており、光束112が、観視者100の片目101に入射する。これにより、観視者100は、光束112に含まれる映像情報を片目101で観視する。
なお、フロントガラス部710は、観視者100からの距離が21.7cm以上の位置に配置される。これにより、特許文献1に記載された効果によって、観視者100が知覚する奥行き感が増強され、また、表示オブジェクト180を所望の奥行き位置に知覚させることができる。なお、ヘッドマウントディスプレイ(HMD: Head Mounted Display)において、片目(単眼)に映像呈示を行うことがあるが、目のごく近傍(21.7cmよりも近い位置)に配置された表示部による映像を知覚するだけであり、奥行き感を持った高い臨場感の表示はできない。
なお、図3に例示したように、表示装置10は、例えば車両730の中、すなわち、例えば、操縦者である観視者100から見て車両730のダッシュボード720の奥に設けられることができる。また、観視者100は、車両730のハンドル731(ステアリング、操舵装置)を操作して、車両730の進行方向を制御する。
映像投影部115は、例えば、映像データ生成部130と、映像形成部110と、投影部120と、を有する。
映像データ生成部130は、表示オブジェクト180を含む映像に対応する映像信号を生成し、映像形成部110に供給する。
映像形成部110としては、例えば、液晶表示装置(LCD)などの光スイッチを用いることができる。そして、映像形成部110は、映像データ生成部130から供給された映像信号に基づいて、映像形成部110の画面に映像を形成する。
一方、投影部120には、例えば、各種の光源、レンズ、ミラー、及び、発散角(拡散角)を制御する各種の光学素子が用いられる。
本具体例では、投影部120は、光源121と、テーパライトガイド122と、光源側レンズ123と、アパーチャ124と、出射側レンズ125と、出射側ミラー126と、を含む。
本具体例では、投影部120は、光源121と、テーパライトガイド122と、光源側レンズ123と、アパーチャ124と、出射側レンズ125と、出射側ミラー126と、を含む。
光源121は光束112となる光を生成する。光束112となる光の進行方向に沿って、光源121と出射側ミラー126との間にテーパライトガイド122が配置され、テーパライトガイド122と出射側ミラー126との間に光源側レンズ123が配置され、光源側レンズ123と出射側ミラー126との間にアパーチャ124が配置され、アパーチャ124と出射側ミラー126との間に出射側レンズ125が配置される。
本具体例では、テーパライトガイド122と光源側レンズ123との間に、映像形成部110(例えばLCD)が配置されている。
光源121には、LED(Light Emitting Diode)や高圧水銀ランプ、ハロゲンランプ、レーザなど各種のものを用いることができる。光源121にLEDを用いることで、消費電力を低減でき、また装置を軽量化でき、小型化できる。
映像データ生成部130、映像形成部110及び投影部120のそれぞれの構成は、種々の変形が可能である。映像形成部110に含まれる要素と、投影部120に含まれる要素と、の配置は任意であり、例えば、投影部120に含まれる要素どうしの間に、映像形成部110(及びそれに含まれる要素)が挿入されていても良い。
光源121から出射された光は、テーパライトガイド122において発散角がある程度の範囲に制御される。そして、その光は、映像形成部110を経ることで、所定の表示オブジェクト180を含む映像を含む光束112となる。
本具体例では、出射側ミラー126は、凹面状であり、これにより、光束112に含まれる映像情報の像を拡大して観視者100に投影できる。
図3に表したように、光束112は、出射側ミラー126で反射した後、車両730のフロントガラス部710で反射して、観視者100の片目101に到る。
観視者100は、フロントガラス部710を介して、像形成位置181pの位置に形成された表示オブジェクト180の像181(虚像)を知覚する。このように、表示装置10は、HUDとして使用できる。
なお、出射側ミラー126は可動式とすることができ、例えば、観視者100の頭部105の位置や動きに合わせて、手動で、または、自動で、出射側ミラー126の位置や角度を調節し、光束112を片目101に適切に投影させることができる。
なお、映像投影部115は、上記の具体例の他に、各種の変形が可能である。
なお、映像投影部115は、上記の具体例の他に、各種の変形が可能である。
表示装置10は、片目101で観視する表示装置であるため、両目で常時観視されないように、光束112の広がりが制御され、光束112の中心が片目101に投影され、両目には投影されない。観視者100の位置における光束112の投影領域114の大きさは、片目101だけが入り、両目が入らない大きさに設定される。観視者100の両目(瞳)の間隔は、例えば、60ミリメートル(mm)〜75mmであるので、観視者100の位置における光束112の投影領域114の大きさ(左右方向の幅)は、例えば60mm〜75mm程度以下に設定される。この投影領域114の大きさは、主に投影部120に含まれる光学素子によって制御される。
制御部250は、映像投影部115を制御して、観視者100の位置における光束112の投影位置114a(投影領域114の位置)を制御する。
例えば、制御部250は、制御信号部251と駆動部126aとを有する。制御信号部251は、制御信号を駆動部126aに出力し、駆動部126aを動作させる。駆動部126aは、例えば、出射側ミラー126の角度や位置などを変化させるモータなどを有する。制御信号部251から出力された制御信号によって駆動部126aが動作し、出射側ミラー126の角度や位置などを変化させ、観視者100の位置における光束112の投影位置114aを変化させる。駆動部126aは、映像投影部115に含まれると見なしても良い。なお、本具体例では、制御部250は、後述する検出部252をさらに有している。
例えば、制御部250は、制御信号部251と駆動部126aとを有する。制御信号部251は、制御信号を駆動部126aに出力し、駆動部126aを動作させる。駆動部126aは、例えば、出射側ミラー126の角度や位置などを変化させるモータなどを有する。制御信号部251から出力された制御信号によって駆動部126aが動作し、出射側ミラー126の角度や位置などを変化させ、観視者100の位置における光束112の投影位置114aを変化させる。駆動部126aは、映像投影部115に含まれると見なしても良い。なお、本具体例では、制御部250は、後述する検出部252をさらに有している。
そして、本実施形態に係る表示装置10においては、制御部250は、車両730の進行方向の変化に応じて、光束112の投影領域114の投影位置114aを制御する。以下では、説明を簡単にするために、車両730の進行方向が変化する場合が、右折または左折である場合として説明する。
すなわち、発明者の実験によると、車両730が右折するときは、観視者100の頭部105は、直進時よりも右方向に移動し、観視する片目101の位置は、直進時よりも右方向に移動する。そして、車両730が左折するときは、観視者100の頭部105は、直進時よりも左方向に移動し、観視する片目101の位置は、直進時よりも左方向に移動する。制御部250は、観視者100の片目101の位置に対応するように、光束112の投影領域114の投影位置114aを制御する。なお、上記の実験結果については後述する。
以下、制御部250の動作について説明する。
図1(a)、図1(b)及び図1(c)は、観視者の右目101Rに光束112が投影される場合の表示装置10の動作を例示している。そして、図1(a)、図1(b)及び図1(c)は、それぞれ、車両730が直進しているとき、右折するとき、及び、左折するときにおける表示装置10の動作を例示している。
図1(a)、図1(b)及び図1(c)は、観視者の右目101Rに光束112が投影される場合の表示装置10の動作を例示している。そして、図1(a)、図1(b)及び図1(c)は、それぞれ、車両730が直進しているとき、右折するとき、及び、左折するときにおける表示装置10の動作を例示している。
図1(a)に例示したように、車両730が直進しているとき、表示装置10は、観視者100の右目101Rに光束112を投影する。すなわち、右目101Rの位置は、光束112の投影領域114の範囲内に位置する。このように、表示装置10の制御部250は、光束112の投影位置114aを制御する。
車両730が直進しているときの投影位置114aを、基準の位置である直進時投影位置114oとする。
そして、図1(a)に例示したように、車両730の進行方向をZ方向とする。そして、車両730の左右方向をX方向とする。そして、車両730の上下方向をY方向とする。
そして、図1(a)に例示したように、車両730の進行方向をZ方向とする。そして、車両730の左右方向をX方向とする。そして、車両730の上下方向をY方向とする。
車両730が直進しているときには、Z方向は、観視者100の正面方向と一致する。そして、観視者100が正面を向いているときは、X方向は、観視者100左右方向に一致する。そして、Y方向は、観視者100の上下方向に一致する。
ここで、X方向の正の方向を観視者の左目101Lから右目101Rに向かう方向とする。X方向の負の方向は、観視者の右目101Rから左目101Lに向かう方向である。
ここで、X方向の正の方向を観視者の左目101Lから右目101Rに向かう方向とする。X方向の負の方向は、観視者の右目101Rから左目101Lに向かう方向である。
図1(b)に表したように、車両730が右折するときは、観視者100の頭部105は、直進時よりも右方向に移動する。これに伴い、観視者100の右目101Rの位置は、直進時よりも右方向に移動するが、光束112は、観視者100の左目101Lに入射できるため、観視者100は映像を観視することができる。このため、制御部250は、光束112の投影位置114aを移動させない。または、右目101Rの移動に対応させて、制御部250は、光束112の投影位置114aを、直進時よりも右方向に移動させても良い。
そして、図1(c)に表したように、車両730が左折するときは、観視者100の頭部105は、直進時よりも左方向に移動する。これに伴い、観視する右目101Rの位置は、直進時よりも左方向に移動する。この移動に対応させて、制御部250は、光束112の投影位置114aを、直進時よりも左方向に移動させる。
また、観視者100が左目で観視するときも、表示装置10は同様の動作を行う。
図2(a)、図2(b)及び図2(c)は、観視者の左目101Lに光束112が投影される場合の表示装置10の動作を例示している。そして、図2(a)、図2(b)及び図2(c)は、それぞれ、車両730が直進しているとき、右折するとき、及び、左折するときにおける表示装置10の動作を例示している。
図2(a)、図2(b)及び図2(c)は、観視者の左目101Lに光束112が投影される場合の表示装置10の動作を例示している。そして、図2(a)、図2(b)及び図2(c)は、それぞれ、車両730が直進しているとき、右折するとき、及び、左折するときにおける表示装置10の動作を例示している。
図2(a)に例示したように、車両730が直進しているとき、表示装置10は、観視者100の左目101Lに光束112を投影する。このときも、図2(a)に例示した車両730が直進しているときの投影位置114aが、基準の位置である直進時投影位置114oである。
図2(b)に表したように、車両730が右折するときは、観視者100の頭部105は、直進時よりも右方向に移動する。これに伴い、観視する左目101Lの位置は、直進時よりも右方向に移動する。この移動に対応させて、制御部250は、光束112の投影位置114aを、直進時よりも右方向に移動させる。
そして、図2(c)に表したように、車両730が左折するときは、観視者100の頭部105は、直進時よりも左方向に移動する。これに伴い、観視者100の左目101Lの位置は、直進時よりも左方向に移動するが、光束112は、観視者100の右目101Rに入射できるため、観視者100は映像を観視することができる。このため、制御部250は、光束112の投影位置114aを移動させない。または、右目101Rの移動に対応させて、制御部250は、光束112の投影位置114aを、直進時よりも左方向に移動させても良い。
このように、制御部250は、車両730の進行方向が右方向に変化するときに、車両730が直進するときの光束112の投影位置(直進時投影位置114o)よりも観視者100の左目101Lから右目101Rに向かう方向(X方向の正方向)に光束112の投影位置114aを移動させる。そして、制御部250は、車両730の進行方向が左方向に変化するときに、車両730が直進するときの光束112の投影位置(直進時投影位置114o)よりも観視者100の右目101Rから左目101Lに向かう方向(X方向の負の方向)に光束112の投影位置114aを移動させる。
特に、制御部250は、車両730の進行方向が右方向に変化するときにおいて、車両730が直進するときに光束112が左目101Lに投影されているときに、車両730が直進するときの光束112の投影位置140aよりも観視者100の左目101Lから右目101Rに向かう方向に光束112の投影位置140aを移動させる。そして、制御部250は、車両730の進行方向が左方向に変化するときにおいて、車両730が直進するときに光束112が右目101Rに投影されているときに、車両730が直進するときの光束112の投影位置140よりも観視者100の右目101Rから左目101Lに向かう方向に光束112の投影位置140aを移動させる。
これにより、車両730が進行方向を変えるときに、観視者100の片目101の位置が移動しても、観視者100は観視し易くできる。
車両730の進行方向が右方向に変化するときとは、例えば、現在進行している道に分岐があり、その分岐から右方向に延在する道に車両730の進路が変更される場合である。また、例えば、直進している道を走行中に、その道が右方向に曲がり、その道の曲がりに沿って、車両730の進行方向が変化させられる場合も、車両730の進行方向が右方向に変化するときに含まれる。そして、左方向においても同様である。
以下では、説明を簡単にするために、車両730の進行方向が右方向または左方向に変化するときとして、現在進行している道に分岐があり、その分岐から右方向または左方向に延在する道に車両730の進路が変更される場合であるとして説明する。すなわち、車両730の進行方向が右方向に変化するときは、車両730が右折するときであり、車両730の進行方向が左方向に変化するときとは、車両730が左折するときである場合として説明する。
図1(b)及び(c)、並びに、図2(b)及び(c)に例示したように、車両730が直進するときの光束112の投影位置(直進時投影位置114o)に対して、右折または左折するときに光束112の投影位置114aを移動させる距離を移動距離Lxとする。
なお、以下では、直進時において光束112が右目101Rに投影されるか左目101Lに投影されるかに係わらず、右方向または左方向に進行方向を変化させる場合に光束112の投影位置140aを移動させる場合として説明するが、既に説明したように、直進時において光束112が右目101Rに投影されているときに右方向に進行方向を変化させるときは光束112の投影位置140aを移動させず、直進時において光束112が左目101Lに投影されているときに左方向に進行方向を変化させるときは光束112の投影位置140aを移動させないことができ、この場合は、光束112の移動距離Lxは零である。
観視者100の右目101Rに光束112を投影する際に、右方向に進行方向を変化させるときの光束112の投影位置114aを移動させる第1移動距離LxRRと、観視者100の右目101Rに光束112を投影する際に、左方向に進行方向を変化させるときの光束112の投影位置114aを移動させる第2移動距離LxRLと、観視者100の左目101Lに光束112を投影する際に、右方向に進行方向を変化させるときの光束112の投影位置114aを移動させる第3移動距離LxLRと、観視者100の左目101Lに光束112を投影する際に、左方向に進行方向を変化させるときの光束112の投影位置114aを移動させる第4移動距離LxLLと、は、互いに異なっても良い。
第1移動距離LxRR、第2移動距離LxRL、第3移動距離LxLR及び第4移動距離LxLLは、例えば、車両730の仕様(例えば観視者100が車両730の右側に搭乗するか左側に搭乗するかなど)、車両730が走行する路の条件(例えば右側通行か左側通行か)、及び、観視者100の特性や好みなど、に基づいて適切に設定される。
以下、車両730が左方向に進行方向を変更する場合、または、右方向に進行方向を変更する場合の観視者100の片目101の位置の変化について説明する。
発明者は、車両730が交差点等で右折または左折するときと、カーブした道を車両730が進行するコーナー時と、において、車両730を操縦する観視者100の片目101の位置の変化について測定する実験を行った。この実験においては、延べ人数が42人の被験者(観視者100)が車両730を操縦し、車両730が直進している状態から、交差点等の直進方向からほぼ90度の方向に、右折または左折するときと、カーブした道を車両730が進行するコーナー時と、における観視者100の頭部105の画像を撮像し、撮像された画像から片目101の位置の変化を検出した。このとき、片目101の位置としては、便宜的に右目101Rの位置としたが、左目101Lの位置は右目101Rの位置に連動しており、片目101の位置の変化は、左目101Lの位置の変化と見なしても良い。
発明者は、車両730が交差点等で右折または左折するときと、カーブした道を車両730が進行するコーナー時と、において、車両730を操縦する観視者100の片目101の位置の変化について測定する実験を行った。この実験においては、延べ人数が42人の被験者(観視者100)が車両730を操縦し、車両730が直進している状態から、交差点等の直進方向からほぼ90度の方向に、右折または左折するときと、カーブした道を車両730が進行するコーナー時と、における観視者100の頭部105の画像を撮像し、撮像された画像から片目101の位置の変化を検出した。このとき、片目101の位置としては、便宜的に右目101Rの位置としたが、左目101Lの位置は右目101Rの位置に連動しており、片目101の位置の変化は、左目101Lの位置の変化と見なしても良い。
図4は、車両の進行方向を変えるときの観視者の目の位置を例示するグラフ図である。 すなわち、同図(a)は、車両730が右折する際の観視者100の片目101の位置変化を表し、同図(b)は、車両730が左折する際の観視者100の片目101の位置変化を表す。これらの図において、横軸は片目101の位置の目移動距離Dexを表している。横軸が零の位置は、直進しているときの片目101の位置であり、横軸の値が正の場合は、片目101が、右方向(X方向の正の方向)に移動したことに相当し、負の場合は、片目101が、左方向(X方向の負の方向)に移動したことに相当する。そして、これらの図の縦軸は、発生頻度NLを表している。
図4(a)に表したように、車両730が右折する際には、片目101の位置の目移動距離Dexは正の値を示した。すなわち、車両730が右折する際には、観視者100の片目101は、直進時に対して右方向に移動する。そして、この実験においては、その目移動距離Dexの平均は、約28mmである。
図4(b)に表したように、車両730が左折する際には、片目101の位置の目移動距離Dexは負の値を示した。すなわち、車両730が左折する際には、観視者100の片目101は、直進時に対して左方向に移動する。そして、この実験においては、その目移動距離Dexの平均は、約55mmである。
なお、車両730が右折または左折するときに、直進しているときから観視者100の目の位置が右方向または左方向に移動する際には、観視者100の頭部105がY方向を軸として回転する場合の他に、観視者100の頭部105及び上体が傾く場合が多いことも分かった。
このように、観視者100である操縦者の目の位置は、車両730が右折(進行方向が右に変化する)または左折(進行方向が左方向に変化する)する際には、直進しているときから移動する。このようなヒトの特性に関する実験結果は、発明者のこの実験により見出されたものである。
そして、光束112の投影領域114が狭く制御される単眼用のHUDにおいては、車両730が右折または左折する際に、目の位置が、直進しているときの目の位置から移動すると、観視者100は光束112に含まれる映像を観視し難くなる。このように、単眼用のHUDを実際に使用する際に問題となり得る新たな課題が初めて見出された。
本発明は、ヒトの特性に関して新たに見出された上記の現象、及び、その現象に関連して新たに見出された単眼用のHUDの実用上の課題に対処すべく、なされたものである。
すなわち、車両730の右折または左折に対応させて、光束112の投影位置114aを、直進時の直進時投影位置114oから移動させる。これによって、車両730が左折または右折する際に、観視者100の片目101の位置が移動しても観視し易くできる。
なお、車両730の右折または左折に対応させて、光束112の投影位置114aを、直進時の直進時投影位置114oから移動させるときの移動距離Lxは、例えば、図4(a)及び(b)に例示した実験結果を基に定めることができる。これにより、観視者100の片目101の位置が移動してもより観視し易くできる。
例えば、光束112の投影位置114aを、直進時の直進時投影位置114oから移動させるときの移動距離Lxは、右折時よりも左折時の方を大きくすることができる。
なお、図4(a)及び(b)において、右折する場合の図4(a)よりも、左折する場合の図4(b)の方が、片目101の目移動距離Dexの絶対値は大きい。このように、この特性は、左右方向において非対称である。これは、具体例では、実験の際に、直進している場合には、進行している路の左側を車両730が走行したために、右折時に比べて左折時の方が、進行方向を変化させるときの、回転半径が小さくなったことが関係していると考えられる。また、今回実験に使用した車両730が右側にハンドルがある車であり、このことが上記の非対称性に関係していると考えられる。さらに、右方向に進行方向を変える場合には、車両730の屋根を支持するピラーの影響も考えられ、これによって、上記の非対称性が生じる場合もあると考えられる。
従って、車両730の右折または左折に対応させて、光束112の投影位置114aを、直進時の直進時投影位置114oから移動させるときの移動距離は、使用する車両730が道路の右側を進行するか、左側を進行するか、や、ハンドルが取り付けられる位置などに基づいて、適切に設定することができる。
また、光束112の投影位置114aを、直進時の直進時投影位置114oから移動させるときの移動距離Lxは、瞳の間隔である60mm以上75mm以下の距離としても良い。これにより、図4(a)及び(b)に例示したヒトの特性を実質的に補償し、観視者100の片目101の位置が移動したときに観視し易くできる。
ところで、例えば、撮像装置(カメラ)などを用いて観視者100の片目101の位置を検出して、制御部250は、検出された片目101の位置に連動させて、光束112の投影位置114aを制御しても良い。ただし、観視者100の片目101の位置を検出するカメラなどを設置すると装置のコストが上昇するため、必ずしも観視者100の片目101の位置を検出する必要はない。
すなわち、図4(a)及び(b)に例示したように、ヒトの特性として、右折または左折する際には、直進時からの片目101の位置の目移動距離Dexは、特定の分布を持つことが分かったので、この特性を利用して、光束112の投影位置114aを制御することができる。
すなわち、観視者100の片目101の位置の厳密な測定を行わずに、車両730の進行方向を検出し、この検出結果に基づいて、観視者100の片目101の移動方向と目移動距離Dexを推定して、光束112の投影位置114aを制御することができる。
なお、直進しているときに観視している片目101が右目101Rか左目101Lかで、進行方向を右折または左折するときに光束112の投影位置140aを移動させるか否かを変える制御を行う場合、直進しているときに観視している片目101に関する情報は、種々の方法で得ることができる。例えば、車両730の運転開始時の初期設定で、操縦者である観視者100が、右目101Rか左目101Lかを入力しても良い。また、例えば、初期設定時に光束112の投影位置140aが投影されている位置を、座席の中心軸などと対比させて検出し、直進しているときの観視している片目101が右目101Rか左目101Lかを推定しても良い。また、運転時に観視者100の頭部105を撮像し、その画像から直進しているときの観視している片目101が右目101Rか左目101Lかを推定しても良い。
以下、車両730の進行方向の検出について説明する。
図5は、第1の実施形態に係る表示装置の動作を例示する模式図である。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、車両730のハンドル731の舵角によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際のハンドル731の状態を例示している。
図5は、第1の実施形態に係る表示装置の動作を例示する模式図である。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、車両730のハンドル731の舵角によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際のハンドル731の状態を例示している。
図5(a)に表したように、車両730が直進している場合には、ハンドル731の軸731aは、X方向に対して垂直である(Y方向に対して垂直としても良い)。直進時のハンドル731の軸731aの位置が、基準角度731aoとされる。
図5(b)に表したように、車両730が右折する場合には、ハンドル731の軸731aは、直進時から時計周りに回転する。すなわち、ハンドル731の舵角θsは正の値である。
図5(c)に表したように、車両730が左折する場合には、ハンドル731の軸731aは、直進時から反時計周りに回転する。すなわち、ハンドル731の舵角θsは負の値である。
このように、車両730の進行方向は、車両730のハンドル731の舵角θsによって検出される。
このとき、舵角θsが一定の値よりも小さい場合は、車両730は直進していると見なすように設定される。例えば、運転中のハンドル731の遊びによって、直進している場合においても、舵角θsは零でない。また、右折や左折するのではなく、走行する車線を変える場合などにおいて舵角θsは小さく、このような場合には、進行方向を変えるものと見なさないように設定する。
例えば、舵角θsの絶対値が45度以上のときに、進行方向を変更し、右折または左折するものと設定する。そして、舵角θsの絶対値が45度以上のときに、光束112の投影領域114を直進時から移動させるように設定できる。このように、舵角θsに関して、進行方向を変更(右折または左折)すると判定するしきい値を設けることができる。
また、舵角θsの絶対値だけではなく、車両730の走行速度にさらに基づいて、進行方向を変更(右折または左折)すると判定するしきい値を変化させても良い。例えば、車両730の走行速度が速い場合には、観視者100は正面を向き易く、従って観視者100の片目101の位置は、直進時から移動し難い。一方、車両730の走行速度が遅い場合には、観視者100の片目101の位置は、直進時から移動し易い。このような場合には、舵角θsの絶対値と、車両730の走行速度と、を組み合わせて、進行方向を変更(右折または左折)すると判定する、舵角θsに関するしきい値を変化させても良い。例えば、舵角θsの絶対値が45度である場合は、複数の車線(通行部分)を有する道を進行しているときの車線変更の場合と、区別できることが確認されている。
図6は、第1の実施形態に係る表示装置の動作を例示する模式図である。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、車両730に加わる横方向の力(左右方向の加速度)によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際に車両730に加わる横方向の力(左右方向の加速度)を例示している。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、車両730に加わる横方向の力(左右方向の加速度)によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際に車両730に加わる横方向の力(左右方向の加速度)を例示している。
図6(a)に表したように、車両730が直進している場合には、車両730には横方向の力は印加されない。
図6(b)に表したように、車両730が右折する場合には、遠心力によって、車両730には曲がる方向の外側に向けて横方向の力Fh(すなわち、左右方向の加速度)が印加される。
図6(c)に表したように、車両730が左折する場合には、遠心力によって、車両730には曲がる方向の外側に向けて横方向の力Fh(すなわち、左右方向の加速度)が印加される。
このような横方向の力Fh(すなわち、左右方向の加速度)を例えば加速度計によって検出することで、車両730の進行方向を、検出することができる。
このとき、横方向の力Fh(左右方向の加速度)が一定の値よりも小さい場合は、車両730は直進していると見なすように設定される。このように、横方向の力Fhに関して、進行方向を変更(右折または左折)すると判定するしきい値を設けることができる。また、横方向の力Fh(左右方向の加速度)だけではなく、車両730の走行速度にさらに基づいて、進行方向を変更(右折または左折)すると判定する、横方向の力Fh(左右方向の加速度)に関するしきい値を変化させても良い。
図7は、第1の実施形態に係る表示装置の動作を例示する模式図である。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、観視者100の姿勢の変化によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際の観視者100の姿勢の変化を例示している。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、観視者100の姿勢の変化によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際の観視者100の姿勢の変化を例示している。
図7(a)に表したように、車両730が直進している場合には、観視者100は座席に真っ直ぐに着席している。
図7(b)に表したように、車両730が右折する場合には、観視者100の頭部105が、曲がる方向の内側である右側に移動する。すなわち、観視者100の姿勢は、右方向に傾く。
図7(c)に表したように、車両730が左折する場合には、観視者100の頭部105が、曲がる方向の内側である左側に移動する。すなわち、観視者100の姿勢は、左向に傾く。
このような観視者100の姿勢の変化は、例えば、観視者100の像をカメラなどで撮像して、その像に基づいて求めることができる。このとき、観視者100の姿勢の変化を検出することは、観視者100の片目101の位置を検出することよりも精度が低くて良いので、比較的容易に実施することができる。また、観視者100の姿勢は、観視者100の体の位置などを、座席に設けたセンサなどによって検出し、その結果から検出することもできる。これにより、観視者100の姿勢の変化から、車両730の進行方向を、推定して、検出することができる。
なお、このとき、観視者100の姿勢の変化が一定の値よりも小さい場合は、車両730は直進していると見なすように設定される。このように、観視者100の姿勢の変化に関して、進行方向を変更(右折または左折)すると判定するしきい値を設けることができる。また、観視者100の姿勢の変化だけではなく、車両730の走行速度にさらに基づいて、進行方向を変更(右折または左折)すると判定する、観視者100の姿勢の変化に関するしきい値を変化させても良い。
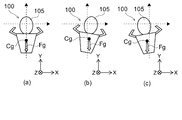
図8は、第1の実施形態に係る表示装置の動作を例示する模式図である。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、観視者100の重心の位置の変化によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際の観視者100の重心の位置の変化を例示している。
すなわち、同図(a)、(b)及び(c)は、表示装置10における車両730の進行方向の検出方法の一例を例示している。すなわち、この例では、車両730の進行方向が、観視者100の重心の位置の変化によって検出される場合を例示している。同図(a)、(b)及び(c)は、それぞれ、車両730が、直進、右折及び左折する際の観視者100の重心の位置の変化を例示している。
図8(a)に表したように、車両730が直進している場合には、観視者100は座席に真っ直ぐに着席している。このときの観視者100の重心Cgの位置を基準の位置とする。すなわち、例えば、観視者100が着席する座席の中心の位置に、観視者100の重心Cgの位置に対応する荷重Fgが印加される。
図8(b)に表したように、車両730が右折する場合には、観視者100の体は曲がる方向の内側である右側に傾き、観視者100の重心Cgが右方向に移動する。そして、基準の位置よりも右側に、観視者100の重心Cgの位置に対応する荷重Fgが印加される。
図8(c)に表したように、車両730が左折する場合には、観視者100の体は曲がる方向の内側である左側に傾き、観視者100の重心Cgが左方向に移動する。そして、基準の位置よりも左側に、観視者100の重心Cgの位置に対応する荷重Fgが印加される。
このような観視者100の重心Cgの位置の変化は、例えば、観視者100が着席する座席に設けたセンサなどによって検出することができる。これにより、観視者100の重心Cgの位置の変化から、車両730の進行方向を、推定して、検出することができる。
なお、このとき、観視者100の重心Cgの位置の変化が一定の値よりも小さい場合は、車両730は直進していると見なすように設定される。このように、観視者100の重心Cgの位置の変化に関して、進行方向を変更(右折または左折)すると判定するしきい値を設けることができる。また、観視者100の重心Cgの位置の変化だけではなく、車両730の走行速度にさらに基づいて、進行方向を変更(右折または左折)すると判定する、観視者100の重心Cgの位置の変化に関するしきい値を変化させても良い。
また、表示装置10における車両730の進行方向は、上記のハンドル731の舵角θs、車両730に加わる横方向の力Fh(左右方向の加速度)、観視者100の姿勢の変化、及び、観視者100の重心の位置の変化、から選ばれた任意の2つ以上を組み合わせたものに基づいて検出しても良い。
そして、図3に関して説明したように、制御部250は、車両730の進行方向を検出する検出部252を有することができる。この検出部252は、車両730のハンドル731の舵角θs、車両730に加わる左右方向の加速度(横方向の力Fh)、観視者100の姿勢の変化、及び、観視者100の重心Cgの位置の変化の少なくともいずれかの検出結果に基づいて車両730の進行方向を検出することができる。
そして、このように検出された車両730の進行方向に基づいて、車両730の右折または左折に対応させて、光束112の投影位置114aが上記のように制御されて、移動される。
なお、上記においては、検出部252が制御部250に含まれる場合として説明したが、上記の検出部252と同様の機能を有する検出部を、制御部250とは別に設けても良い。また、映像データ生成部130などのように、映像投影部115に含まれる構成要素が、検出部252と同様の機能を有する検出部を含んでも良い。また、表示装置10とは別に、上記の検出部252と同様の機能を有する検出部が設けられ、その検出部による車両730の進行方向の変化の検出結果を入手して、制御部250は上記の動作を行っても良い。
以下では、光束112の投影位置114aの制御の例について説明する。
以下では、一例として、表示装置10における車両730の進行方向が、ハンドル731の舵角θsによって検出される場合として説明する。そして、説明を簡単にするために、車両730の進行方向が右方向に変化するときは、現在進行している道に右曲がりの右コーナーがあり、車両730がその右コーナーを右方向に進行する場合とする。同様に、車両730の進行方向が直進から左方向に変化するときは、現在進行している道に左曲がりの左コーナーがあり、車両730がその左コーナーを左方向に進行する場合とする。
以下では、一例として、表示装置10における車両730の進行方向が、ハンドル731の舵角θsによって検出される場合として説明する。そして、説明を簡単にするために、車両730の進行方向が右方向に変化するときは、現在進行している道に右曲がりの右コーナーがあり、車両730がその右コーナーを右方向に進行する場合とする。同様に、車両730の進行方向が直進から左方向に変化するときは、現在進行している道に左曲がりの左コーナーがあり、車両730がその左コーナーを左方向に進行する場合とする。
図9は、第1の実施形態に係る表示装置の動作を例示するグラフ図である。
すなわち、同図(a)及び(b)は、車両730が右折する際の光束112の投影位置114aを例示している。すなわち、同図(a)は、直進時から右折し始めるとき(すなわち、右コーナーに入るとき)における投影位置114aの変化を表しており、同図(b)は、右折が終わりかけて再び直進に戻るとき(すなわち、右コーナーから出るとき)における投影位置114aの変化を表している。これらの図において、横軸は、舵角θsであり、縦軸は、光束112の投影位置114aの直進時からの移動距離Lxである。そして、本具体例は、観視者100の左目101Lに光束112が投影される場合である。
すなわち、同図(a)及び(b)は、車両730が右折する際の光束112の投影位置114aを例示している。すなわち、同図(a)は、直進時から右折し始めるとき(すなわち、右コーナーに入るとき)における投影位置114aの変化を表しており、同図(b)は、右折が終わりかけて再び直進に戻るとき(すなわち、右コーナーから出るとき)における投影位置114aの変化を表している。これらの図において、横軸は、舵角θsであり、縦軸は、光束112の投影位置114aの直進時からの移動距離Lxである。そして、本具体例は、観視者100の左目101Lに光束112が投影される場合である。
図9(a)に表したように、直進時から右コーナーに入るときにおいては、舵角θsに関する第1舵角しきい値θ1が設けられる。本具体例では、第1舵角しきい値θ1は45度である。そして、舵角θsが第1舵角しきい値θ1よりも小さいときは、車両730は直進していると見なされる。なお、右コーナーに入るときには、舵角θsが正で、絶対値が増大する。
そして、舵角θsが第1舵角しきい値θ1以上になると、車両730は右折(右方向に進路を変更する)と判定され、光束112の投影位置114aは移動される。本具体例では、舵角θsが角度θ1aである90度になると、光束112の投影位置114aの移動距離Lxは、第3移動距離LxLRとされている。なお、角度θ1aは、第1舵角しきい値θ1以上であれば任意であり、角度θ1aの設定により、舵角θsの変化に対する移動距離Lxの変化率が任意に設定できる。
このようにして、右コーナーに入り、右折が開始される。
このようにして、右コーナーに入り、右折が開始される。
図9(b)に表したように、右コーナーから出るときにおいては、舵角θsの絶対値が減少する。すなわち、ハンドル731を元の直進状態の角度に戻す。このとき、舵角θsに関する第2舵角しきい値θ2が設けられる。本具体例では、第1舵角しきい値θ2は180度である。
すなわち、舵角θsが減少する際には、舵角θsが第2舵角しきい値θ2よりも大きいときは、光束112の投影位置114aの移動距離Lxは、第3移動距離LxLRを維持する。そして、舵角θsが減少する際に、舵角θsが第2舵角しきい値θ2以下となった場合に、光束112の投影位置114aの移動距離Lxが、第3移動距離LxLRから減少される。
そして、本具体例では、舵角θsが角度θ2aである135度になると、光束112の投影位置114aの移動距離Lxは、零とされている。なお、角度θ2aは、第2舵角しきい値θ2以下であれば任意であり、角度θ2aの設定により、舵角θsの変化に対する移動距離Lxの変化率が任意に設定できる。
すなわち、発明者の実験によると、コーナーに入るときには、舵角θsが小さい(例えば45度)ときに、観視者100の片目101は、直進時から移動し始め、コーナーから出るとき、すなわち、舵角θsを元の状態に戻すときには、舵角θsが大きい(例えば180度)ときに、観視者100の片目101は、元の直進時の位置に移動し始めることが分かった。この特性に合わせて、光束112の投影位置114aの移動が制御される。
発明者によって見出されたこの特性に基づいて、光束112の投影位置114aが制御される。すなわち、コーナーに入るときに光束112の投影位置114aを移動させ始める舵角θsのしきい値(第1舵角しきい値θ1)は、コーナーから出るときに光束112の投影位置114aを元に戻し始める舵角θsのしきい値(第2舵角しきい値θ2)よりも小さい。
これにより、ヒトの特性に適合した動作が実施でき、目の位置が移動してもさらに観視し易くできる。
これにより、ヒトの特性に適合した動作が実施でき、目の位置が移動してもさらに観視し易くできる。
図9(c)及び(d)は、車両730が右折する際の光束112の投影位置114aの別の例を示している。
図9(c)に表したように、第1舵角しきい値θ1と角度θ1aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第3移動距離LxLRで一度に移動される。
また、図9(d)に表したように、第2舵角しきい角度θ2と角度θ2aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第3移動距離LxLRで一度に移動される。
図9(c)に表したように、第1舵角しきい値θ1と角度θ1aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第3移動距離LxLRで一度に移動される。
また、図9(d)に表したように、第2舵角しきい角度θ2と角度θ2aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第3移動距離LxLRで一度に移動される。
図10は、第1の実施形態に係る表示装置の別の動作を例示するグラフ図である。
すなわち、これらの図は、車両730が左折する際の光束112の投影位置114aを例示している。すなわち、同図(a)は、左コーナーに入るときにおける投影位置114aの変化を表しており、同図(b)は、左コーナーから出るときにおける投影位置114aの変化を表している。これらの図において、横軸は、舵角θsであり、縦軸は、光束112の投影位置114aの直進時からの移動距離Lxである。本具体例は、観視者100の右目101Rに光束112が投影される場合である。
すなわち、これらの図は、車両730が左折する際の光束112の投影位置114aを例示している。すなわち、同図(a)は、左コーナーに入るときにおける投影位置114aの変化を表しており、同図(b)は、左コーナーから出るときにおける投影位置114aの変化を表している。これらの図において、横軸は、舵角θsであり、縦軸は、光束112の投影位置114aの直進時からの移動距離Lxである。本具体例は、観視者100の右目101Rに光束112が投影される場合である。
図10(a)に表したように、直進時から左コーナーに入るときにおいては、舵角θsに関する第3舵角しきい値θ3が設けられる。本具体例では、第3舵角しきい値θ3は−45度である。なお、第3舵角しきい値θ3の絶対値は、第1舵角しきい値θ1の絶対値と異なっても良い。そして、舵角θsの絶対値が第3舵角しきい値θ3の絶対値よりも小さいときは、車両730は直進していると見なされる。なお、左コーナーに入るときには、舵角θsが負で、絶対値が増大する。
そして、舵角θsが負で、舵角θsの絶対値が第3舵角しきい値θ3の絶対値以上になると、車両730は左折すると判定され、光束112の投影位置114aは移動される。そして、本具体例では、舵角θsの絶対値が角度θ3aである−90度になると、光束112の投影位置114aの移動距離Lxは、第2移動距離LxRLとされている。なお、角度θ3aの絶対値は、第3舵角しきい値θ3の絶対値以上であれば任意であり、角度θ3aの設定により、舵角θsの絶対値の変化に対する移動距離Lxの変化率が任意に設定できる。
このようにして、左コーナーに入り、左折が開始される。
このようにして、左コーナーに入り、左折が開始される。
図10(b)に表したように、左コーナーから出るときにおいては、舵角θsが負であり、操角θsの絶対値が減少する。すなわち、ハンドル731を元の直進状態の角度に戻す。このとき、舵角θsに関する第4舵角しきい値θ4が設けられる。本具体例では、第4舵角しきい値θ4は−180度である。なお、第4舵角しきい値θ4の絶対値は、第2舵角しきい値θ2の絶対値と異なっても良い。
すなわち、舵角θsが負で舵角θsの絶対値が減少する際には、舵角θsの絶対値が第4舵角しきい値θ4よりも大きいときは、光束112の投影位置114aの移動距離Lxは、第2移動距離LxRLを維持する。そして、舵角θsが負で舵角θsの絶対値が減少する際に、舵角θsの絶対値が第4舵角しきい値θ4以下となった場合に、光束112の投影位置114aの移動距離Lxが、第2移動距離LxRLから減少される。
そして、本具体例では、舵角θsが角度θ4aである−135度になると、光束112の投影位置114aの移動距離Lxは、零とされている。なお、角度θ4aの絶対値は、第4舵角しきい値θ4以下であれば任意であり、角度θ4aの設定により、舵角θsの変化に対する移動距離Lxの変化率が任意で設定できる。
このように、左折の場合においても、発明者によって見出された上記の特性に基づいて、光束112の投影位置114aが制御される。すなわち、コーナーに入るときに光束112の投影位置114aを移動させ始める舵角θsのしきい値(第3舵角しきい値θ3)の絶対値は、コーナーから出るときに光束112の投影位置114aを元に戻し始める舵角θsのしきい値(第4舵角しきい値θ4)の絶対値よりも小さい。
図10(c)及び(d)は、車両730が左折する際の光束112の投影位置114aの別の例を示している。
図10(c)に表したように、第3舵角しきい値θ3と角度θ3aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第2移動距離LxRLで一度に移動される。
図10(c)に表したように、第3舵角しきい値θ3と角度θ3aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第2移動距離LxRLで一度に移動される。
また、図10(d)に表したように、第4舵角しきい値θ4と角度θ4aとは、互いに同じ値でも良い。この場合は、光束112の投影位置140aは、第2移動距離LxRLで一度に移動される。
このように、表示装置10においては、車両730の進行方向は、車両730のハンドル731の舵角θsに基づいて検出されことができる。
そして、コーナーに入るときには、以下が実施される。すなわち、制御部250は、車両730が直進するときを基準にした車両730のハンドル731の舵角θsの絶対値が、予め定められた第1値(第1舵角しきい値θ1または第3舵角しきい値θ3)の絶対値以上になったときに、光束112の投影位置114aを、車両730が直進するときの光束112の投影位置(直進時投影位置114o)から移動させる。舵角θsは、直進するときの車両730のハンドル731の基準角度(例えば、図5に例示した基準角度731ao)に対する角度である。
そして、コーナーに入るときには、以下が実施される。すなわち、制御部250は、車両730が直進するときを基準にした車両730のハンドル731の舵角θsの絶対値が、予め定められた第1値(第1舵角しきい値θ1または第3舵角しきい値θ3)の絶対値以上になったときに、光束112の投影位置114aを、車両730が直進するときの光束112の投影位置(直進時投影位置114o)から移動させる。舵角θsは、直進するときの車両730のハンドル731の基準角度(例えば、図5に例示した基準角度731ao)に対する角度である。
そして、コーナーから出るときには、以下が実施される。すなわち、制御部250は、車両730の進行方向が右方向または左方向に変化した後に車両730の進行方向が直進方向に戻る際には、舵角θsの絶対値が、第1値の絶対値よりも大きい絶対値を有する予め定められた第2値(第2舵角しきい値θ2または第4舵角しきい値θ4)以下になったときに、光束112の投影位置114aを、移動させた位置から、車両730が直進するときの光束112の投影位置(直進時投影位置114o)に向かって戻す。
これにより、ヒトの特性に適合した動作が実施でき、目の位置が移動してもさらに観視し易くできる。
なお、例えば、舵角θsの絶対値が、第1舵角しきい値θ1以上第2舵角しきい値θ2以下である場合、または、第3舵角しきい値θ3以上第4舵角しきい値θ4以下である場合には、状況によっては、投影位置140aを移動させる動作と、元に戻す動作と、が短い時間内に繰り返される「発振」状態が発生する可能性がある。この「発振」を発生させないために種々の工夫を実施することができる。例えば、舵角θsの瞬時値を用いて上記の制御を行うのではなく、舵角θsの一定の時間内における増大または減少の傾向を検出し、その傾向と上記のしきい値とを組み合わせて、上記の投影位置140aの制御を行うことができる。例えば、舵角θsの絶対値が増大を維持する時間または減少を維持する時間が一定の時間以上である場合に、投影位置140aを移動または元に戻す動作を実施する。また、舵角θsの絶対値の増大の時間当たりの変化率または減少の時間当たりの変化率が一定の値以上である場合に、投影位置140aを移動または元に戻す動作を実施する。このような制御は、アナログ回路技術、デジタル回路技術、及び、コンピュータソフトウエア技術のいずれか、及び、それらを組み合わせて実施することができる。
図11は、第1の実施形態に係る別の表示装置の構成を例示する模式図である。
すなわち、同図は、本実施形態に係る別の表示装置10aの構成を例示している。同図は、映像形成部110及び投影部120の構成を例示している。すなわち、同図においては、制御部250及び映像データ生成部130は省略され、表示装置10aにおける制御部250及び映像データ生成部130の構成は、表示装置10と同様とすることができる。
すなわち、同図は、本実施形態に係る別の表示装置10aの構成を例示している。同図は、映像形成部110及び投影部120の構成を例示している。すなわち、同図においては、制御部250及び映像データ生成部130は省略され、表示装置10aにおける制御部250及び映像データ生成部130の構成は、表示装置10と同様とすることができる。
図11に表したように、投影部120は、光源121と、テーパライトガイド122と、光源側レンズ123と、第1ミラー124aと、出射側レンズ125と、第2ミラー125aと、出射側ミラー126と、を含む。
光束112となる光の進行方向に沿って、光源121と出射側ミラー126との間にテーパライトガイド122が配置され、テーパライトガイド122と出射側ミラー126との間に光源側レンズ123が配置され、光源側レンズ123と出射側ミラー126との間に第1ミラー124aが配置され、第1ミラー124aと出射側ミラー126との間に出射側レンズ125が配置され、出射側レンズ125と出射側ミラー126との間に第2ミラー125aが配置される。
そして、テーパライトガイド122と光源側レンズ123との間に、映像形成部110(例えばLCD)が配置されている。
このように、表示装置10aにおいては、光束112の光路は折りたたまれている。
光源側レンズ123には、例えば、平凹状のレンズが用いられる。第1ミラー124aには、例えば凹面ミラーが用いられる。第1ミラー124aは、図3に例示した表示装置10におけるアパーチャ124の機能を有している。
光源側レンズ123には、例えば、平凹状のレンズが用いられる。第1ミラー124aには、例えば凹面ミラーが用いられる。第1ミラー124aは、図3に例示した表示装置10におけるアパーチャ124の機能を有している。
出射側レンズ125には、例えば両凹状のレンズが用いられる。第2ミラー125aには、例えば平面ミラーが用いられる。出射側レンズ125には、例えば凹面ミラーが用いられる。
また、本具体例では、出射側ミラー126が、光束112の出射方向を上下方向に変化させる機能を有する。そして、第2ミラー125aが、光束112の出射方向を左右方向に変化させる機能を有する。
すなわち、具体例では、制御部250は、例えば第2ミラー125aの角度を変化させて、観視者100の位置における光束112の投影位置114aを移動させる。ただし、表示装置10aにおいても、制御部250は、第2ミラー125aだけを制御するだけではなく、他の光学素子を制御しても良く、また、例えば投影部120や映像投影部115自体の角度や位置を変化させても良い。
そして、表示装置10aにおいても、表示装置10と同様の動作を行うことで、例えば右折や左折のときに対応して観視者100の目の位置が移動しても観視し易いHUD型の表示装置が提供できる。
なお、本発明の実施形態に係る表示装置10及び10aにおいて、映像形成部110としては、LCDの他に、DMD(Digital Micromirror Device)、及び、MEMS(Micro-electro-mechanical System)等の各種光スイッチを用いることができる。また、映像形成部110には、レーザプロジェクタやLEDプロジェクタなどを用いることもでき、その場合は、レーザビームやLEDからの光により映像を形成する。
また、光源121には、LEDや高圧水銀ランプ、ハロゲンランプ、レーザなど各種のものを用いることができる。
なお、上記の実施形態においては、表示装置10及び10aが、観視者100の片目101に光束112を投影する場合の例として説明したが、本実施形態はこれに限らない。本実施形態は、車両730を操縦する観視者100の目の位置が、車両730が右折(進行方向が右に変化する)または左折(進行方向が左方向に変化する)する際に、直進しているときから移動するという、図4(a)及び(b)に示したヒトの特性に関する実験結果に基づいてなされたものであり、本実施形態に係る投影位置140aの制御は、両目で観視する表示装置にも提供でき、同様の効果を発揮する。ただし、本実施形態の投影領域140aの制御を、光束112の投影制御140が狭く制御される片目で観視される表示装置に適用すると、特に大きな効果を発揮する。
なお、本実施形態に係る表示装置が搭載される車両730(移動体)は、四輪車だけでなく、二輪車でも良い。また、本実施形態に係る表示装置は、鉄道車両やバスなどに搭載されても良い。その場合にも、車両730(移動体)の進行方向の変化に合わせて光束112の投影位置114aを移動させることで観視し易いHUD型の表示装置が提供できる。さらに、本実施形態に係る表示装置は、車両だけでなく、航空機や船舶などを含めた任意の移動体に搭載され、同様の動作を行うことで同様の効果が得られる。
また、本実施形態に係る表示装置は、車両や航空機などを模した種々のシミュレータにも用いることができる。この場合にも、制御部250は、シミュレータの車両の進行方向が右方向に変化するときに、シミュレータの車両が直進するときの光束112の投影位置114aよりも観視者100の左目101Lから右目101Rに向かう方向に光束112の投影位置114aを移動させ、シミュレータの車両の進行方向が左方向に変化するときに、直進時の投影位置114aよりも観視者100の右目101Rから左目101Lに向かう方向に光束112の投影位置114aを移動させる。これにより、観視し易いシミュレータ用のHUD型の表示装置が提供できる。
さらに、本実施形態に係る表示装置は、例えば、片目で見ることで奥行き知覚を増強して呈示する、ゲームなどの娯楽用の表示装置にも応用することが可能である。
(第2の実施の形態)
本発明の第2の実施形態は、表示方法である。すなわち、本実施形態に係る表示方法は、映像を含む光束112を車両730(移動体)のフロントガラス部710に反射させて車両730に搭乗する観視者100に向けて投影する表示方法である。
図12は、本発明の第2の実施形態に係る表示方法を示すフローチャート図である。
図12に表したように、本実施形態に係る表示方法では、車両730の進行方向が右方向に変化するときに、車両730が直進するときの光束112の投影位置114aよりも観視者100の左目101Lから右目101Rに向かう方向(X方向の正の方向)に光束112の投影位置114aを移動させる(ステップS10)。
本発明の第2の実施形態は、表示方法である。すなわち、本実施形態に係る表示方法は、映像を含む光束112を車両730(移動体)のフロントガラス部710に反射させて車両730に搭乗する観視者100に向けて投影する表示方法である。
図12は、本発明の第2の実施形態に係る表示方法を示すフローチャート図である。
図12に表したように、本実施形態に係る表示方法では、車両730の進行方向が右方向に変化するときに、車両730が直進するときの光束112の投影位置114aよりも観視者100の左目101Lから右目101Rに向かう方向(X方向の正の方向)に光束112の投影位置114aを移動させる(ステップS10)。
そして、車両730の進行方向が左方向に変化するときに、車両730が直進するときの光束112の投影位置114aよりも観視者100の右目101Rから左目101Lに向かう方向(X方向の負の方向)に光束112の投影位置114aを移動させる(ステップS20)。
なお、上記のステップS10とステップS20との順序は任意であり、互いに入れ換えが可能である。
なお、上記のステップS10とステップS20との順序は任意であり、互いに入れ換えが可能である。
すなわち、車両730が右折または左折する際には、直進しているときから観視者100の目の位置が移動するというヒトの特性に対応させて、光束112の投影位置114aを、直進時の投影位置114aから移動させる。これにより、車両730が左折または右折する際に、観視者100の片目101の位置が移動しても観視し易くできる。
特に、ステップS10は、車両730が直進するときに光束112が観視者100の左目101Lに投影されるときに実施されることが望ましい。
また、ステップS20は、車両730が直進するときに光束112が観視者100の右目101Rに投影されるときに実施されることが望ましい。
また、ステップS20は、車両730が直進するときに光束112が観視者100の右目101Rに投影されるときに実施されることが望ましい。
すなわち、車両730の進行方向が右方向に変化するときにおいて、車両730が直進するときに光束112が左目101Lに投影されているときに、車両730が直進するときの光束112の投影位置140aよりも観視者100の左目101Lから右目101Rに向かう方向に光束112の投影位置140aを移動させる。
そして、車両730の進行方向が左方向に変化するときにおいて、車両730が直進するときに光束112が右目101Rに投影されているときに、車両730が直進するときの光束112の投影位置140aよりも観視者100の右目101Rから左目101Lに向かう方向に光束112の投影位置140aを移動させる。
(第3の実施の形態)
本発明の第3の実施形態に係る移動体(車両)には、本発明の実施形態に係るいずれかの表示装置が搭載される。
すなわち、例えば図3に表したように、本実施形態に係る車両730(移動体)は、本発明の実施形態に係る表示装置10と、表示装置10から出射される光束112を観視者100に向けて反射させるフロントガラス部710と、を備える。なお、フロントガラス部710には、反射部711(例えばコンバイナ)が付設されても良く、フロントガラス部710は、反射部711を含む。
本発明の第3の実施形態に係る移動体(車両)には、本発明の実施形態に係るいずれかの表示装置が搭載される。
すなわち、例えば図3に表したように、本実施形態に係る車両730(移動体)は、本発明の実施形態に係る表示装置10と、表示装置10から出射される光束112を観視者100に向けて反射させるフロントガラス部710と、を備える。なお、フロントガラス部710には、反射部711(例えばコンバイナ)が付設されても良く、フロントガラス部710は、反射部711を含む。
本実施形態に係る車両によれば、車両730が右折または左折する際には、直進しているときから観視者100の目の位置が移動するというヒトの特性に対応させて、光束112の投影位置114aを、直進時の投影位置114aから移動させる。これにより、車両730が左折または右折する際に、観視者100の片目101の位置が移動しても観視し易くできる。
以上、具体例を参照しつつ、本発明の実施の形態について説明した。しかし、本発明は、これらの具体例に限定されるものではない。例えば、表示装置及び移動体(車両)を構成する各要素の具体的な構成に関しては、当業者が公知の範囲から適宜選択することにより本発明を同様に実施し、同様の効果を得ることができる限り、本発明の範囲に包含される。
また、各具体例のいずれか2つ以上の要素を技術的に可能な範囲で組み合わせたものも、本発明の要旨を包含する限り本発明の範囲に含まれる。
また、各具体例のいずれか2つ以上の要素を技術的に可能な範囲で組み合わせたものも、本発明の要旨を包含する限り本発明の範囲に含まれる。
その他、本発明の実施の形態として上述した表示装置、表示方法及び移動体を基にして、当業者が適宜設計変更して実施し得る全ての表示装置、表示方法及び移動体も、本発明の要旨を包含する限り、本発明の範囲に属する。
その他、本発明の思想の範疇において、当業者であれば、各種の変更例及び修正例に想到し得るものであり、それら変更例及び修正例についても本発明の範囲に属するものと了解される。
10、10a…表示装置、 100…観視者、 101…片目、 101L…左目、 101R…右目、 105…頭部、 110…映像形成部、 112…光束、 114…投影領域、 114a…投影位置、 114o…直進時投影位置、 115…映像投影部、 120…投影部、 121…光源、 122…テーパライトガイド、 123…光源側レンズ、 124…アパーチャ、 124a…第1ミラー、 125…出射側レンズ、 125a…第2ミラー、 126…出射側ミラー、 126a…駆動部、 130…映像データ生成部、 180…表示オブジェクト、 181…像、 181a…像形成位置、 250…制御部、 251…制御信号部、 252…検出部、 710…フロントガラス部、 711…反射部(コンバイナ)、 720…ダッシュボード、 730…車両(移動体)、 731…ハンドル(ステアリング、操舵装置)、 731a…軸、 731ao…基準角度、 Cg…重心、 Dex…目移動距離、 Fg…荷重、 Fh…力、 Lx…移動距離、 LxLL…第4移動距離、 LxLR…第3移動距離、 LxRL…第2移動距離、 LxRR…第1移動距離、 θ1…第1舵角しきい値、 θ1a…角度、 θ2…第2舵角しきい値、 θ2a…角度、 θ3…第3舵角しきい値、 θ3a…角度、 θ4…第4舵角しきい値、 θ4a…角度、 θs…舵角
Claims (6)
- 移動体に搭載され、映像を含む光束を前記移動体のフロントガラス部に反射させて前記移動体に搭乗する観視者に向けて投影する表示装置であって、
前記光束を前記観視者に向けて投影する映像投影部と、
前記映像投影部を制御して、前記観視者の位置における前記光束の投影位置を制御する制御部と、
を備え、
前記制御部は、
前記移動体の進行方向が右方向に変化するときに、前記移動体が直進するときの前記光束の投影位置よりも前記観視者の左目から右目に向かう方向に前記光束の投影位置を移動させ、
前記移動体の進行方向が左方向に変化するときに、前記移動体が直進するときの前記光束の前記投影位置よりも前記観視者の前記右目から前記左目に向かう方向に前記光束の前記投影位置を移動させることを特徴とする表示装置。 - 前記制御部は、
前記移動体の進行方向が右方向に変化するときにおいて、前記移動体が直進するときに前記光束が前記左目に投影されているときに、前記移動体が直進するときの前記光束の投影位置よりも前記観視者の前記左目から前記右目に向かう前記方向に前記光束の前記投影位置を移動させ、
前記移動体の進行方向が左方向に変化するときにおいて、前記移動体が直進するときに前記光束が前記右目に投影されているときに、前記移動体が直進するときの前記光束の前記投影位置よりも前記観視者の前記右目から前記左目に向かう前記方向に前記光束の前記投影位置を移動させることを特徴とする請求項1記載の表示装置。 - 前記制御部は、前記移動体の操舵装置の舵角、前記移動体に加わる左右方向の加速度、前記観視者の姿勢の変化、及び、前記観視者の重心の位置の変化の少なくともいずれかの検出結果に基づいて前記移動体の前記進行方向を検出する検出部を有することを特徴とする請求項1または2に記載の表示装置。
- 前記制御部は、
前記移動体が直進するときを基準にした前記移動体の操舵装置の舵角の絶対値が、予め定められた第1値の絶対値以上になったときに、前記光束の前記投影位置を、前記移動体が直進するときの前記光束の前記投影位置から移動させ、
前記移動体の進行方向が右方向または左方向に変化した後に前記移動体の前記進行方向が直進方向に戻る際には、前記舵角の絶対値が、前記第1値よりも大きい絶対値を有する予め定められた第2値の絶対値以下になったときに、前記光束の前記投影位置を、前記移動させた位置から、前記移動体が直進するときの前記光束の前記投影位置に向かって戻すことを特徴とする請求項1〜3のいずれか1つに記載の表示装置。 - 映像を含む光束を移動体のフロントガラス部に反射させて前記移動体に搭乗する観視者に向けて投影する表示方法であって、
前記移動体の進行方向が右方向に変化するときに、前記移動体が直進するときの前記光束の投影位置よりも前記観視者の左目から右目に向かう方向に前記光束の投影位置を移動させ、
前記移動体の進行方向が左方向に変化するときに、前記移動体が直進するときの前記光束の前記投影位置よりも前記観視者の前記右目から前記左目に向かう方向に前記光束の前記投影位置を移動させることを特徴とする表示方法。 - 請求項1〜4のいずれか1つに記載の表示装置と、
前記表示装置から出射される前記光束を前記観視者に向けて反射させるフロントガラス部と、
を備えたことを特徴とする移動体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009278671A JP2011121402A (ja) | 2009-12-08 | 2009-12-08 | 表示装置、表示方法及び移動体 |
| PCT/JP2010/006915 WO2011070738A1 (ja) | 2009-12-08 | 2010-11-26 | 表示装置、表示方法及び移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009278671A JP2011121402A (ja) | 2009-12-08 | 2009-12-08 | 表示装置、表示方法及び移動体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011121402A true JP2011121402A (ja) | 2011-06-23 |
Family
ID=44145302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009278671A Pending JP2011121402A (ja) | 2009-12-08 | 2009-12-08 | 表示装置、表示方法及び移動体 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2011121402A (ja) |
| WO (1) | WO2011070738A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017149995A1 (ja) * | 2016-03-02 | 2017-09-08 | 富士フイルム株式会社 | 投写型表示装置、投写制御方法、及び、投写制御プログラム |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5275963B2 (ja) | 2009-12-08 | 2013-08-28 | 株式会社東芝 | 表示装置、表示方法及び移動体 |
| JP5734888B2 (ja) | 2012-01-31 | 2015-06-17 | 株式会社東芝 | 表示装置、移動体、及び、表示装置の設置方法 |
| CN103342116A (zh) * | 2013-07-29 | 2013-10-09 | 江苏睿维申电子科技有限公司 | 一种汽车抬头显示系统hud |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001301486A (ja) * | 2000-04-18 | 2001-10-31 | Honda Motor Co Ltd | 車両用ヘッドアップディスプレイ装置 |
| JP2009128565A (ja) * | 2007-11-22 | 2009-06-11 | Toshiba Corp | 表示装置、表示方法及びヘッドアップディスプレイ |
-
2009
- 2009-12-08 JP JP2009278671A patent/JP2011121402A/ja active Pending
-
2010
- 2010-11-26 WO PCT/JP2010/006915 patent/WO2011070738A1/ja not_active Ceased
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017149995A1 (ja) * | 2016-03-02 | 2017-09-08 | 富士フイルム株式会社 | 投写型表示装置、投写制御方法、及び、投写制御プログラム |
| JPWO2017149995A1 (ja) * | 2016-03-02 | 2018-08-09 | 富士フイルム株式会社 | 投写型表示装置、投写制御方法、及び、投写制御プログラム |
| US10746988B2 (en) | 2016-03-02 | 2020-08-18 | Fujifilm Corporation | Projection display device, projection control method, and non-transitory computer readable medium storing projection control program |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2011070738A1 (ja) | 2011-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6458998B2 (ja) | ヘッドアップディスプレイ | |
| JP5275963B2 (ja) | 表示装置、表示方法及び移動体 | |
| CN105283794B (zh) | 平视显示装置 | |
| JP6138634B2 (ja) | ヘッドアップディスプレイ装置 | |
| JP6342704B2 (ja) | 表示装置 | |
| JP6204793B2 (ja) | ヘッドアップディスプレイ装置 | |
| US10302953B2 (en) | Adjustable head-up display arrangement for a vehicle | |
| JP6027498B2 (ja) | ヘッドアップディスプレイ装置 | |
| JPWO2014174575A1 (ja) | 車両用ヘッドアップディスプレイ装置 | |
| JP2012086831A (ja) | 車載表示装置 | |
| JP6314584B2 (ja) | ヘッドアップディスプレイ装置 | |
| JPWO2018088362A1 (ja) | ヘッドアップディスプレイ | |
| JP2012035745A (ja) | 表示装置、画像データ生成装置及び画像データ生成プログラム | |
| JPWO2017090464A1 (ja) | ヘッドアップディスプレイ | |
| JPWO2018056058A1 (ja) | 投写型表示装置、投写表示方法、及び、投写表示プログラム | |
| US20210300183A1 (en) | In-vehicle display apparatus, method for controlling in-vehicle display apparatus, and computer program | |
| JP2018077400A (ja) | ヘッドアップディスプレイ | |
| JP6213323B2 (ja) | ヘッドアップディスプレイ装置 | |
| JP2011123119A (ja) | 表示装置、表示方法及び移動体 | |
| JP2015034945A (ja) | ヘッドアップディスプレイ装置 | |
| JP6269261B2 (ja) | 虚像表示装置 | |
| JP2011121402A (ja) | 表示装置、表示方法及び移動体 | |
| JP2015200770A (ja) | ヘッドアップディスプレイ装置 | |
| JP6196840B2 (ja) | ヘッドアップディスプレイ装置 | |
| JP2015074391A (ja) | ヘッドアップディスプレイ装置 |