JP2012007706A - センサ付き転がり軸受 - Google Patents
センサ付き転がり軸受 Download PDFInfo
- Publication number
- JP2012007706A JP2012007706A JP2010145995A JP2010145995A JP2012007706A JP 2012007706 A JP2012007706 A JP 2012007706A JP 2010145995 A JP2010145995 A JP 2010145995A JP 2010145995 A JP2010145995 A JP 2010145995A JP 2012007706 A JP2012007706 A JP 2012007706A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- magnet
- ring
- fixed
- bearing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Sealing Of Bearings (AREA)
- Rolling Contact Bearings (AREA)
Abstract
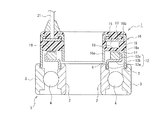
【解決手段】回転側輪2と、固定側輪3と、前記回転側輪2及び前記固定側輪3間に介在する転動体4と、前記回転側輪に固定されたマグネットホルダ12に保持されたリング磁石11と、前記固定側輪に固定されたセンサハウジング16に保持されて前記リング磁石11と所定間隙を保って対向する磁気感応センサ15とを備え、前記マグネットホルダ12及び前記センサハウジング16を磁性体で構成し、当該マグネットホルダ12と当該センサハウジング16とを、前記リング磁石11及び前記磁気感応センサ15間を外部から磁気シールドするように配設した。
【選択図】図1
Description
そこで、本発明は、上述した従来例の未解決の課題に着目してなされたものであり、外部のノイズに起因する外部磁界の影響を除去することができるセンサ付き転がり軸受を提供することを目的とするものである。
また、本発明の他の形態に係るセンサ付き転がり軸受は、前記マグネットホルダは前記軸受空間を覆う円環状板部と前記リング磁石の外径側に接するフランジ部とを少なくとも備えていることを特徴としている。
また、本発明の他の形態に係るセンサ付き転がり軸受は、前記モールド部は前記フランジ部とリング磁石を挟んで反対側近傍に延長する環状突出部を有し、前記リング磁石の前記定空隙を含む周囲にラビリンスを形成したことを特徴としている。
図1は、本発明の第1実施形態を示す縦断面図である。図中、1は自動車、鉄道車両、製鉄設備、工作機械等の回転軸に適用して回転速度を検出するセンサ付き転がり軸受であって、このセンサ付き転がり軸受1は、互いに対向する回転側輪としての軸受内輪2及び固定側輪としての軸受外輪3と、これら軸受内輪2及び軸受外輪3間に介在された多数の転動体4とで転がり軸受5が構成されている。ここで、軸受内輪2及び軸受外輪3のそれぞれは、互いの対向面の軸方向両端側に軸方向端面より所定距離だけ転動体4側に段部6及び7が形成されている。
マグネットホルダ12は、軸受内輪2の段部6に圧入固定されて軸受内輪2の軸方向端部より外方に僅かに突出する円筒部12aと、この円筒部12aの軸方向突出端部から半径方向に転がり軸受5の軸受内輪2及び軸受外輪3間の軸受空間を覆うように延出する円環状板部12bと、この円環状板部12bの外周縁から軸方向外方に突出する円筒状のフランジ部12cとから構成されている。
また、基板17には、図3に磁気感応センサ15から出力される磁界強度に応じた例えば正弦波状の電気的検出信号を信号処理する信号処理回路20を備えており、この信号処理回路20で信号処理された検出信号が信号線21を介して外部の回転速度測定装置に出力される。
今、転がり軸受5の軸受外輪3をハウジング等の固定部に固定するとともに、軸受内輪2内にブラシレスモータ等の三相電動モータ(図示せず)に連結された回転軸を嵌挿した組付状態とする。この状態で、三相電動モータを回転駆動させると、これに応じて軸受内輪2が回転されて、リング磁石11が回転することにより、このリング磁石11に対向して配設された磁気感応センサ15でリング磁石11の着磁パターンに応じた磁界を検出して、軸受内輪2の回転速度に応じた周波数の例えば正弦波でなる検出信号を出力する。
この検出信号を基板17上に実装された信号処理回路20で信号処理してパルス信号に変換し、このパルス信号が信号線21を介して外部の回転速度測定装置に出力される。この回転速度測定装置では、単位時間当たりのパルス信号数を計数するか又はパルス信号のパルス間隔を計測することにより、回転速度を求めることができる。
このようにして、磁気感応センサ15によってリング磁石11で発生される磁界を検出することにより、回転速度又は回転速度及び回転方向を検出することができるものであるが、前述したようにブラシレスモータ等の三相電動モータが近接配置されている場合には、この三相電動モータで発生される電気ノイズに起因する外部磁界がリング磁石11で形成される磁界を乱すおそれがある。
このため、これらリング磁石11、磁気感応センサ15及びセンサギャップ19が外部に晒されることを防止することができるとともに、マグネットホルダ12及びセンサハウジング16が磁気シールドとしての機能を発揮することができる。この磁気シールド機能によって、近接配置された三相電動モータ等で発生される電気ノイズに起因する外部磁界の変化を遮蔽することができ、リング磁石11で発生する磁界が外部磁界によって乱れることを抑制して磁気感応センサ15によってリング磁石11で発生する磁界を正確に検出して正確な検出信号を出力することができる。
さらに、磁気感応センサ15をモールド18で覆うようにしているので、磁気感応センサ15を構成するIC部を外界から保護することが可能となり、センサIC部の防塵及び防水性を高めることができる。
この第2の実施形態は、センサギャップ19を含む通路をラビリンス化したものである。
すなわち、第2の実施形態では、図4に示すように、前述した第1の実施形態における図1の構成において、モールド18をリング磁石11のマグネットホルダ12のフランジ部12cとは反対側の内径面及びマグネットホルダ12の円環状板部12bに近接対向するように突出させて円筒部18aを形成したことを除いては図1と同様の構成を有し、図1との対応部分には同一符号を付しその詳細説明はこれを省略する。
この第3の実施形態では、マグネットホルダ12の軸受内輪2への取付け及びセンサハウジング16の軸受外輪3への取付けをより確実に行うようにしたものである。
すなわち、第3の実施形態では、図5に示すように、前述した第2の実施形態における図4の構成において、軸受内輪2及び軸受外輪3の段部6及び7が省略され、これらに代えて、軸受内輪2の外径面における軸方向端面から所定距離だけ転動体4側に係止凹溝41が円周方向に形成されるとともに、軸受外輪3の内径面における軸方向端面から所定距離だけ転動体4側に係止凹溝42が円周方向に形成されている。ここで、係止凹溝41及び係止凹溝42としては、転がり軸受5のシール溝を使用することができ、このシール溝を使用することにより、特別な加工を施すことなく溝形成を行うことができる。
ここで、円筒部12a及び外筒部16aの加締め箇所数は、特許第4269642号公報に記載されているように、正の整数をn、転動体4の数をZ、2以上の整数をXとしたとき、
(加締め箇所の数)=nZ±X …………(1)
に基づいて算出することが好ましい。このように加締め箇所数を算出することにより、転がり軸受5に発生する可能性のある異音や振動等を低減することができる。
また、上記第1〜第3の実施形態においては、本発明をラジアル転がり軸受に適用した場合について説明したが、これに限定されるものではなく、スラスト転がり軸受にも本発明を適用することができる。
Claims (5)
- 回転側輪と、
固定側輪と、
前記回転側輪及び前記固定側間に介在する転動体と、
前記回転側輪に固定されたマグネットホルダに保持されたリング磁石と、
前記固定側輪に固定されたセンサハウジングに保持されて前記リング磁石と所定間隙を保って対向する磁気感応センサとを備え、
前記マグネットホルダ及び前記センサハウジングを磁性体で構成し、当該マグネットホルダと当該センサハウジングとを、前記リング磁石及び前記磁気感応センサ間を磁気シールドするように配設した
ことを特徴とするセンサ付き転がり軸受。 - 前記マグネットホルダは前記回転側輪及び前記固定側輪間の軸受空間を覆うように配設され、前記センサハウジングは前記マグネットホルダを覆うように断面コ字状に形成されていることを特徴とする請求項1に記載のセンサ付き転がり軸受。
- 前記マグネットホルダは前記軸受空間を覆う円環状板部と前記リング磁石の外径側に接するフランジ部とを少なくとも備えていることを特徴とする請求項2に記載のセンサ付き転がり軸受。
- 前記センサハウジングは前記磁気感応センサをモールド部によって固定したことを特徴とする請求項1乃至3の何れか1項に記載のセンサ付き転がり軸受。
- 前記モールド部は前記フランジ部とリング磁石を挟んで反対側近傍に延長する環状突出部を有し、前記リング磁石の前記所定空隙を含む周囲にラビリンスを形成したことを特徴とする請求項4に記載のセンサ付き転がり軸受。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010145995A JP2012007706A (ja) | 2010-06-28 | 2010-06-28 | センサ付き転がり軸受 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010145995A JP2012007706A (ja) | 2010-06-28 | 2010-06-28 | センサ付き転がり軸受 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012007706A true JP2012007706A (ja) | 2012-01-12 |
Family
ID=45538479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010145995A Pending JP2012007706A (ja) | 2010-06-28 | 2010-06-28 | センサ付き転がり軸受 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012007706A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140010488A1 (en) * | 2012-07-05 | 2014-01-09 | Aktiebolaget Skf | Instrumented bearing |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07311212A (ja) * | 1992-11-13 | 1995-11-28 | Skf Ind Spa | 2つの相対的に回転する部材の相互の運動を測定するセンサの保持装置 |
| JPH09196946A (ja) * | 1996-01-16 | 1997-07-31 | Nippon Seiko Kk | 回転速度検出装置付転がり軸受ユニット |
| JP2004218684A (ja) * | 2003-01-10 | 2004-08-05 | Nsk Ltd | センサ付軸受装置 |
| JP2005265095A (ja) * | 2004-03-19 | 2005-09-29 | Ntn Corp | センサ付軸受およびこれを用いたプーリ,電磁クラッチ |
| JP2006336753A (ja) * | 2005-06-02 | 2006-12-14 | Nsk Ltd | センサ付転がり軸受ユニット |
| JP2009080058A (ja) * | 2007-09-27 | 2009-04-16 | Ntn Corp | 回転検出装置および回転検出装置付き軸受 |
-
2010
- 2010-06-28 JP JP2010145995A patent/JP2012007706A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07311212A (ja) * | 1992-11-13 | 1995-11-28 | Skf Ind Spa | 2つの相対的に回転する部材の相互の運動を測定するセンサの保持装置 |
| JPH09196946A (ja) * | 1996-01-16 | 1997-07-31 | Nippon Seiko Kk | 回転速度検出装置付転がり軸受ユニット |
| JP2004218684A (ja) * | 2003-01-10 | 2004-08-05 | Nsk Ltd | センサ付軸受装置 |
| JP2005265095A (ja) * | 2004-03-19 | 2005-09-29 | Ntn Corp | センサ付軸受およびこれを用いたプーリ,電磁クラッチ |
| JP2006336753A (ja) * | 2005-06-02 | 2006-12-14 | Nsk Ltd | センサ付転がり軸受ユニット |
| JP2009080058A (ja) * | 2007-09-27 | 2009-04-16 | Ntn Corp | 回転検出装置および回転検出装置付き軸受 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140010488A1 (en) * | 2012-07-05 | 2014-01-09 | Aktiebolaget Skf | Instrumented bearing |
| US8950944B2 (en) * | 2012-07-05 | 2015-02-10 | Aktiebolaget Skf | Instrumented bearing |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5666886B2 (ja) | ロータリエンコーダ | |
| US20110156505A1 (en) | Magnetic encoder and actuator | |
| JP4269642B2 (ja) | モータ用センサ付き転がり軸受 | |
| TW201826670A (zh) | 馬達 | |
| CN102124304A (zh) | 磁式旋转检测装置及其制造方法 | |
| EP3009802B1 (en) | Sensing device and method for manufacturing sensing device | |
| US11041739B2 (en) | Rotation sensor | |
| US20090022441A1 (en) | Assembly Forming a Bearing Housing Equipped with an Information Sensing System | |
| JP5724326B2 (ja) | センサ付き転がり軸受及びセンサ付き転がり軸受を使用した自動車、鉄道車両、製鉄設備、工作機械 | |
| JP2000225931A (ja) | 回転速度検出装置 | |
| CN111198340B (zh) | 电动机 | |
| JP6728793B2 (ja) | センサ付軸受装置 | |
| JP2013007672A (ja) | センサ付き転がり軸受装置 | |
| JP5569181B2 (ja) | センサ付き転がり軸受 | |
| JP2012007706A (ja) | センサ付き転がり軸受 | |
| JP4979850B2 (ja) | 内蔵エンコーダを有する封止ガスケットを形成する予備組立済アセンブリ及び該アセンブリを備えるベアリング | |
| JP5786992B2 (ja) | センサ付き転がり軸受、自動車、鉄道車両、製鉄設備、及び工作機械 | |
| JP2005069449A (ja) | センサ付軸受 | |
| JP2013251982A (ja) | モータ | |
| JP5424253B2 (ja) | 磁気エンコーダ及び回転検出装置 | |
| JP2012008073A (ja) | センサ付き転がり軸受 | |
| JP5321115B2 (ja) | 回転センサ付き転がり軸受 | |
| JP2009030712A (ja) | センサ付き軸受 | |
| JP4869760B2 (ja) | 回転検出装置付き軸受 | |
| JP2004218684A (ja) | センサ付軸受装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131224 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140729 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150303 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150408 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151110 |