JP2012015146A - リニアアクチュエータ制御装置 - Google Patents
リニアアクチュエータ制御装置 Download PDFInfo
- Publication number
- JP2012015146A JP2012015146A JP2010147315A JP2010147315A JP2012015146A JP 2012015146 A JP2012015146 A JP 2012015146A JP 2010147315 A JP2010147315 A JP 2010147315A JP 2010147315 A JP2010147315 A JP 2010147315A JP 2012015146 A JP2012015146 A JP 2012015146A
- Authority
- JP
- Japan
- Prior art keywords
- current
- target
- value
- plunger
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Magnetically Actuated Valves (AREA)
- Control Of Transmission Device (AREA)
Abstract
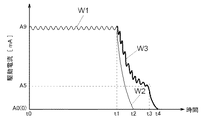
【解決手段】プランジャの端部が当接部材に当接する位置において駆動力と付勢力とが平衡する際の駆動電流に応じて設定された値を補正電流Icとし、補正電流Ic以下の値に設定された値を基準電流Iaとして、駆動電流の目標値Isが基準電流Ia以下となった場合には、補正電流Icを目標電流Itとして設定し、目標電流Itに基づいて駆動電流を制御する。
【選択図】図4
Description
(1)プランジャの軸心に、軸方向に貫通し、外部空間と連通するプランジャ呼吸孔が形成されている。
(2)プランジャが対向部(対向壁)に接近した際に、プランジャと対向壁との間に挟まれて軸方向へ弾性変形する金属製の弾性体が備えられている。
(3)この弾性体は、プランジャが対向壁に近づいて弾性変形した際に、プランジャ呼吸孔の開度を絞る(小さくする)ように設けられている。
前記可動部材の目標位置に応じた前記駆動電流の目標値である目標電流に基づいて前記リニアアクチュエータに前記駆動電流を印加させる駆動制御部と、
前記可動部材の端部が前記当接部材に当接する位置において前記駆動力と前記付勢力とが平衡する際の前記駆動電流に応じて設定された値を補正電流とし、当該補正電流以下の値に設定された値を基準電流として、前記駆動電流の前記目標値が前記基準電流以下となった場合には、前記補正電流を前記目標電流として設定する目標電流設定部と、
を備える点にある。
3:プランジャ
3a:端部
1:ソレノイド(リニアアクチュエータ)
20:バルブ制御ECU(リニアアクチュエータ制御装置)
Is:目標電流指令値(駆動電流の目標値)
It:目標電流
23:駆動制御部
Ic:補正電流
Ia:基準電流
24:目標電流設定部
Im:実電流
Ib:収束電流
Claims (3)
- 駆動電流に応じて生じる駆動力と当該駆動力に対抗する機械的な付勢力との平衡により軸方向に沿って変位可能であり、前記付勢力が前記駆動力に打ち勝つ際には当接部材に端部が当接するプランジャを有するリニアアクチュエータを制御するリニアアクチュエータ制御装置であって、
前記プランジャの目標位置に応じた前記駆動電流の目標値である目標電流に基づいて前記リニアアクチュエータに前記駆動電流を印加させる駆動制御部と、
前記プランジャの端部が前記当接部材に当接する位置において前記駆動力と前記付勢力とが平衡する際の前記駆動電流に応じて設定された値を補正電流とし、当該補正電流以下の値に設定された値を基準電流として、前記駆動電流の前記目標値が前記基準電流以下となった場合には、前記補正電流を前記目標電流として設定する目標電流設定部と、
を備えるリニアアクチュエータ制御装置。 - 前記目標電流設定部は、前記駆動電流の実測値である実電流が前記補正電流の近傍に設定された収束電流に達した場合には、前記プランジャの目標位置に応じた電流値を前記目標電流として設定する請求項1に記載のリニアアクチュエータ制御装置。
- 前記収束電流は、前記補正電流よりも大きい値に設定される請求項2に記載のリニアアクチュエータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010147315A JP5673997B2 (ja) | 2010-06-29 | 2010-06-29 | リニアアクチュエータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010147315A JP5673997B2 (ja) | 2010-06-29 | 2010-06-29 | リニアアクチュエータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012015146A true JP2012015146A (ja) | 2012-01-19 |
| JP5673997B2 JP5673997B2 (ja) | 2015-02-18 |
Family
ID=45601278
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010147315A Expired - Fee Related JP5673997B2 (ja) | 2010-06-29 | 2010-06-29 | リニアアクチュエータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5673997B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013068230A (ja) * | 2011-09-20 | 2013-04-18 | Aisin Seiki Co Ltd | リニアアクチュエータの制御装置 |
| JP2015006858A (ja) * | 2013-06-25 | 2015-01-15 | 株式会社アドヴィックス | 車両の制動制御装置 |
| JP2015206386A (ja) * | 2014-04-18 | 2015-11-19 | 株式会社デンソー | 電磁弁制御装置 |
| JP2021528314A (ja) * | 2018-07-13 | 2021-10-21 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 2段階式の電磁弁を電気的に切替えるための制御装置および方法 |
| WO2024080133A1 (ja) * | 2022-10-13 | 2024-04-18 | Ckd株式会社 | 流体制御弁 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0346079U (ja) * | 1989-09-13 | 1991-04-26 | ||
| JPH0460289A (ja) * | 1990-06-25 | 1992-02-26 | Daikin Ind Ltd | 直流作動式電磁弁 |
-
2010
- 2010-06-29 JP JP2010147315A patent/JP5673997B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0346079U (ja) * | 1989-09-13 | 1991-04-26 | ||
| JPH0460289A (ja) * | 1990-06-25 | 1992-02-26 | Daikin Ind Ltd | 直流作動式電磁弁 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013068230A (ja) * | 2011-09-20 | 2013-04-18 | Aisin Seiki Co Ltd | リニアアクチュエータの制御装置 |
| JP2015006858A (ja) * | 2013-06-25 | 2015-01-15 | 株式会社アドヴィックス | 車両の制動制御装置 |
| JP2015206386A (ja) * | 2014-04-18 | 2015-11-19 | 株式会社デンソー | 電磁弁制御装置 |
| US9653200B2 (en) | 2014-04-18 | 2017-05-16 | Denso Corporation | Electromagnetic-valve controller |
| JP2021528314A (ja) * | 2018-07-13 | 2021-10-21 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 2段階式の電磁弁を電気的に切替えるための制御装置および方法 |
| JP7189974B2 (ja) | 2018-07-13 | 2022-12-14 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 2段階式の電磁弁を電気的に切替えるための制御装置および方法 |
| US12187257B2 (en) | 2018-07-13 | 2025-01-07 | Robert Bosch Gmbh | Control device and method for electrically switching a two-stage solenoid valve |
| WO2024080133A1 (ja) * | 2022-10-13 | 2024-04-18 | Ckd株式会社 | 流体制御弁 |
| JP2024057796A (ja) * | 2022-10-13 | 2024-04-25 | Ckd株式会社 | 流体制御弁 |
| JP7800864B2 (ja) | 2022-10-13 | 2026-01-16 | Ckd株式会社 | 流体制御弁 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5673997B2 (ja) | 2015-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5673997B2 (ja) | リニアアクチュエータ制御装置 | |
| CN103069138B (zh) | 燃料喷射装置的驱动装置 | |
| US9435281B2 (en) | Method for reducing performance variation of an electromagnetically-activated actuator | |
| US20100193036A1 (en) | Method for Actuating a Solenoid Valve and Associated Device | |
| EP3607650B1 (en) | Stepper motor error reduction | |
| US9777660B2 (en) | Parameter estimation in an actuator | |
| JP6104468B2 (ja) | 弾性結合されたアクチュエータを備えた自動車用ハプティックアクセルペダル並びに当該ハプティックアクセルペダルを閉ループ制御する方法および閉ループ制御ユニット | |
| JPH09317419A (ja) | 吸排気用電磁駆動弁の異常検出方法 | |
| JP2016205294A (ja) | 制御装置 | |
| JP7042593B2 (ja) | 電磁弁を制御するための装置および方法 | |
| US20120080536A1 (en) | Method for controlling a fuel injector | |
| CN103119271B (zh) | 线圈执行器的以电磁方式被驱动的电枢的弹道轨迹的确定 | |
| US20180230932A1 (en) | Detecting a predetermined opening state of a fuel injector having a solenoid drive | |
| CN106170626A (zh) | 冲击产生致动器、触摸面板及驱动方法 | |
| CN107655241B (zh) | 一种先导式电子膨胀阀 | |
| US20150069277A1 (en) | Control unit for a pressure regulating valve | |
| JP2017089890A (ja) | ソレノイドバルブ制御システム | |
| US20210265090A1 (en) | Solenoid dither control system and method | |
| JP2017137908A (ja) | 電磁弁制御装置、及び電磁式燃料噴射弁 | |
| CN106150727A (zh) | 燃料喷射控制装置 | |
| US9870852B2 (en) | Method for driving an inductive actuator | |
| JP2010206247A (ja) | 誘導負荷制御装置 | |
| WO2013124890A1 (ja) | 電磁力利用機器 | |
| JP5516971B2 (ja) | リニアソレノイド制御装置 | |
| JP2006093410A (ja) | ソレノイド駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140306 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5673997 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |