JP2012016122A - ステッピングモータの制御方法および制御装置 - Google Patents
ステッピングモータの制御方法および制御装置 Download PDFInfo
- Publication number
- JP2012016122A JP2012016122A JP2010148895A JP2010148895A JP2012016122A JP 2012016122 A JP2012016122 A JP 2012016122A JP 2010148895 A JP2010148895 A JP 2010148895A JP 2010148895 A JP2010148895 A JP 2010148895A JP 2012016122 A JP2012016122 A JP 2012016122A
- Authority
- JP
- Japan
- Prior art keywords
- stepping motor
- current
- time
- rotor
- hold
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Control Of Stepping Motors (AREA)
Abstract
【課題】ロータが初期位置に移動する際の騒音を抑制可能なステッピングモータの制御方法および制御装置を提供する。
【解決手段】制御装置10は、制御回路30および駆動回路40を備えている。制御回路30はCPU31、電流測定部32およびメモリ33を備えており、駆動回路40はモータ駆動部41および電流センシング部42を備えている。ステッピングモータ20の起動時、デューティ比が徐々に大きくなるPWM信号を駆動電圧としてコイルに印加する。よって、ホールド電流は線形に徐々に増加し、急激には増加しない。そのため、ロータが初期位置まで高速で移動することによる振動音あるいは衝撃音等の騒音を抑制できる。
【選択図】図1
【解決手段】制御装置10は、制御回路30および駆動回路40を備えている。制御回路30はCPU31、電流測定部32およびメモリ33を備えており、駆動回路40はモータ駆動部41および電流センシング部42を備えている。ステッピングモータ20の起動時、デューティ比が徐々に大きくなるPWM信号を駆動電圧としてコイルに印加する。よって、ホールド電流は線形に徐々に増加し、急激には増加しない。そのため、ロータが初期位置まで高速で移動することによる振動音あるいは衝撃音等の騒音を抑制できる。
【選択図】図1
Description
本発明は、起動時に、まずロータを初期位置に移動させ、その後に通常駆動を行うステッピングモータの制御方法および制御装置に関する。
ステッピングモータは、複数のコイルに励磁電流を流してステータを磁化させ、ロータをステップごとに回転駆動するものである。図9は、従来のステッピングモータのコイルに流れる励磁電流の波形図である。ステッピングモータを起動するには、まず、任意の位置にあるロータをステータと対向する位置(初期位置)に引き込むためのホールド電流をコイルに流し(時刻t40〜t41)、初期位置での振動が収まった後に、駆動電流を流して通常の駆動を行う(時刻t41以降)。このように駆動することで、ステッピングモータの乱調を防ぎ、確実に起動することができる。
図9に示すように、時刻t40で急激にホールド電流を流すと、ロータは高速で初期位置まで移動するため、ロータロック時に大きな振動音が発生してしまう。また、ロータロック時に、ロータの慣性力による振動が他の機構に伝わって衝撃音が発生してしまうこともある。
特許文献1には、ステッピングモータの回転数を徐々に上げていくスローアップ制御時にホールド制御を2度行い、1度目のホールド期間を2度目のホールド期間より短くするステッピングモータの駆動方法が開示されている。これにより、1度目のホールド期間におけるロータの振動音を抑制できるとしている。
しかしながら、特許文献1の各ホールド期間の開始時には、急激にホールド電流を流すため、現実的には、ロータロック時の振動音あるいは衝撃音を抑制することは困難である。
本発明は、上記の問題点に鑑みてなされたものであり、その目的は、ロータが初期位置に移動する際の騒音を抑制可能なステッピングモータの制御方法および制御装置を提供するものである。
本発明の一態様によれば、複数のコイルに励磁電流を流してロータを回転させるステッピングモータの制御方法において、前記ステッピングモータの起動時のホールド期間内に、前記ロータを所定の初期位置まで移動させるために前記コイルに流す励磁電流を、単位時間当たりの変化量が所定値以下となるように漸次に増加させることを特徴とするステッピングモータの制御方法が提供される。
また、本発明の一態様によれば、複数のコイルに励磁電流を流してロータを回転させるステッピングモータの制御装置において、前記ステッピングモータの起動時のホールド期間内に、前記ロータを所定の初期位置まで移動させるために前記コイルに流す励磁電流を、単位時間当たりの変化量が所定値以下となるように漸次に増加させる制御手段を備えることを特徴とするステッピングモータの制御装置が提供される。
本発明によれば、ホールド電流が徐々に増加するため、ロータが初期位置に移動する際の騒音を抑制できる。
以下、本発明に係るステッピングモータの制御装置および制御方法の実施形態について、図面を参照しながら具体的に説明する。
(第1の実施形態)
図1は、本発明の第1の実施形態に係るステッピングモータの制御装置(以下、制御装置)10およびステッピングモータ20の概略ブロック図である。図1の制御装置10は、制御回路30および駆動回路40を備えている。ステッピングモータ20は、ロータと、ステータと、ステータに巻回された複数のコイル(不図示)とを備えている。図1では、ステッピングモータ20は2相のコイルすなわちA相コイルおよびB相コイルを備えている例を示している。
図1は、本発明の第1の実施形態に係るステッピングモータの制御装置(以下、制御装置)10およびステッピングモータ20の概略ブロック図である。図1の制御装置10は、制御回路30および駆動回路40を備えている。ステッピングモータ20は、ロータと、ステータと、ステータに巻回された複数のコイル(不図示)とを備えている。図1では、ステッピングモータ20は2相のコイルすなわちA相コイルおよびB相コイルを備えている例を示している。
制御装置10内の制御回路30は、CPU(Central Processing Unit)31、電流測定部32およびメモリ33を備えており、駆動回路40はモータ駆動部41および電流センシング部42を備えている。電流センシング部42および電流測定部32はステッピングモータ20のコイルに流れる励磁電流値を検出する。より具体的には、電流センシング部42はシャント抵抗に励磁電流を流し、シャント抵抗での電圧降下を検出する。そして、電流測定部32はその電圧降下から励磁電流を算出する。
CPU31は、ステッピングモータ20の起動開始時点から予め定められた時点までのホールド期間中、電流測定部32で得られた励磁電流と、メモリ33に記憶されるターゲット電流とを比較し、コイルに流れる励磁電流がターゲット電流に近づくよう、デューティ比を調整し、これに対応する1ビットのデジタル信号である、パルス幅変調された制御信号を生成し、モータ駆動部41へ供給する。本実施形態では、ターゲット電流は、ホールド期間終了時に電流値が所定値に達するよう、時間の経過と共に線形に増加する電流であり、予めメモリ33内に記憶されている。モータ駆動部41は制御信号に従ってパルス幅変調された信号(以下、PWM(Pulse Width Modulation)信号)である駆動電圧をコイルに印加する。
コイルに駆動電圧が印加されると励磁電流が流れ、ステータが磁化する。2相のコイルに流す励磁電流の向きを交互に切り替えることによりステータに励磁される磁極が変化し、これによりロータは回転する。本実施形態のステッピングモータ20は、例えば車載用エアコンのアクチュエータとして用いられる。
図2は、励磁電流波形の一例を示す図であり、横軸は時間t、縦軸は励磁電流の値である。なお、A相コイルもB相コイルも同様の励磁電流が流れるよう制御される。同図に示すように、ステッピングモータ20を起動する場合、まず、制御装置10はホールド期間t10〜t12で線形に徐々に励磁電流を増加させていく。ホールド期間t10〜t12は、例えば100msである。これにより、起動前は任意の位置にあったロータは、ステータと対向する位置(初期位置)にゆっくりと引き込まれる。その後、駆動電流を流して通常の駆動を行う。なお、図2においては、駆動電流の波形は簡略化して図示しており、実際には、例えば、所定の周期の正弦波となっている。
ホールド期間中、ロータを初期位置に移動させるためにコイルに流す励磁電流をホールド電流という。ホールド期間t10〜t12は、ロータが初期位置に移動し、振動が収まるまでに要する時間を考慮して設定される。ホールド電流を線形に増加させるため、ロータが起動前の位置から初期位置まで高速には移動せず、振動音や衝撃音等の騒音を抑制できる。
図3は、図2の時刻t11付近における、モータ駆動部41により印加される駆動電圧波形と、ターゲット電流およびホールド電流波形の拡大図である。同図の横軸は時間tであり、縦軸はそれぞれ、駆動電圧、および、励磁電流またはターゲット電流の値である。同図の時刻t20〜t22、t22〜t24等、駆動電圧の立ち上がりから、次の立ち上がりまでがPWM信号の周期Tに相当する。また、図4は、PWM信号の1周期分の制御装置10の処理動作の一例を示すフローチャートである。図3および図4を用いて、制御装置10の処理動作を説明する。
まず、周期Tの開始時点である時刻t20で、モータ駆動部41は駆動電圧をロウからハイに設定する(ステップS1)。駆動電圧のロウおよびハイは、例えば0Vおよび12Vにそれぞれ対応する。次に、電流センシング部42および電流測定部32はコイルに流れるホールド電流値を検出する(ステップS2)。時刻t20からt21の直前まで、ホールド電流はターゲット電流より小さい(ステップS3のNO)ため、CPU31は制御信号をハイ(第1の値)に設定する(ステップS4)。この場合、駆動電圧はハイのままであり(ステップS1)、PWM信号のデューティ比(各周期におけるPWM信号のオン期間の比率)は大きくなる。駆動電圧がハイであると、コイルに流れる励磁電流は増加していく。
時刻t21で、ホールド電流がターゲット電流に達すると(ステップS3のYES)、CPU31は制御信号をロウ(第2の値)に設定する(ステップS5)。これに応じて、モータ駆動部41は駆動電圧をロウに設定し(ステップS6)、コイルへの駆動電圧の印加を停止する。以降、周期Tの終了時点である時刻t22まで駆動電圧はロウである(ステップS6,S7)。周期Tに対する駆動電圧がハイである時刻t20〜t21の比がPWM信号のデューティ比である。
駆動電圧がロウである時刻t21〜t22では、コイルの両端には電圧が印加されないが、コイルのインダクタ成分のため、図3に示すように、ホールド電流は徐々に減少し、ターゲット電流より小さくなる。
その後、次の周期の開始時点である時刻t22で、制御装置10は図4の処理動作を開始し、モータ駆動部41が駆動電圧を再びハイに設定する。これにより、ホールド電流は増加し始める。時刻t22〜t24の周期では、時刻t20〜t22の周期よりターゲット電流が増加している。そのため、時刻t20〜t21より長い時刻t22〜t23の期間、駆動電圧はハイに設定される。
図2のホールド期間t10〜t12の間、図4の処理動作を繰り返し、PWM信号のデューティ比を徐々に大きくすることで、図2に示す、線形に増加するホールド電流が生成される。
なお、図2の拡大図である図3に示すように、厳密には、ホールド電流は鋸歯状にリップルを伴いながら増加している。しかしながら、ホールド期間t10〜t12に比べ、PWM信号の周期Tは十分に短い。一例として、ホールド期間t10〜t12が100msであるのに対し、PWM信号の周期Tは、例えば、0.1msである。そのため、ホールド電流は漸次に線形に増加するとみなせる。
このように、第1の実施形態では、ステッピングモータ20の起動時、デューティ比が徐々に大きくなるPWM信号を駆動電圧としてコイルに印加する。よって、ホールド電流は線形に徐々に増加し、急激には増加しない。そのため、ロータが初期位置まで高速で移動することによる振動音あるいは衝撃音等の騒音を抑制できる。
(第2の実施形態)
上述した第1の実施形態では、駆動電圧をPWM信号とし、そのデューティ比を徐々に大きくすることで線形に増加するホールド電流を生成した。これに対し、以下に説明する第2の実施形態では、駆動電圧の電圧値を徐々に高くして、線形に増加するホールド電流を生成するものである。
上述した第1の実施形態では、駆動電圧をPWM信号とし、そのデューティ比を徐々に大きくすることで線形に増加するホールド電流を生成した。これに対し、以下に説明する第2の実施形態では、駆動電圧の電圧値を徐々に高くして、線形に増加するホールド電流を生成するものである。
図5は、本発明の第2の実施形態に係るステッピングモータの制御装置10aおよびステッピングモータ20の概略ブロック図である。図5では、図1と共通する構成部分には同一の符号を付しており、以下では相違点を中心に説明する。
図5の制御回路30aはCPU31およびメモリ33aを備えており、駆動回路40aは電圧制御部43およびモータ駆動部41を備えている。メモリ33aには、ターゲット電流ではなく電圧プロファイルが予め記憶されている。電圧プロファイルとは時間と駆動電圧値との関係を示すテーブルである。CPU31は、電圧プロファイルに設定された駆動電圧がステッピングモータ20のコイルに印加されるよう、デジタル信号である制御信号を生成し、電圧制御部43に供給する。電圧制御部43は、制御信号に応じ駆動電圧を生成し、モータ駆動部41に供給する。モータ駆動部41は駆動電圧をコイルに印加する。
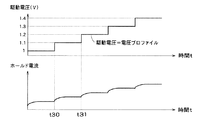
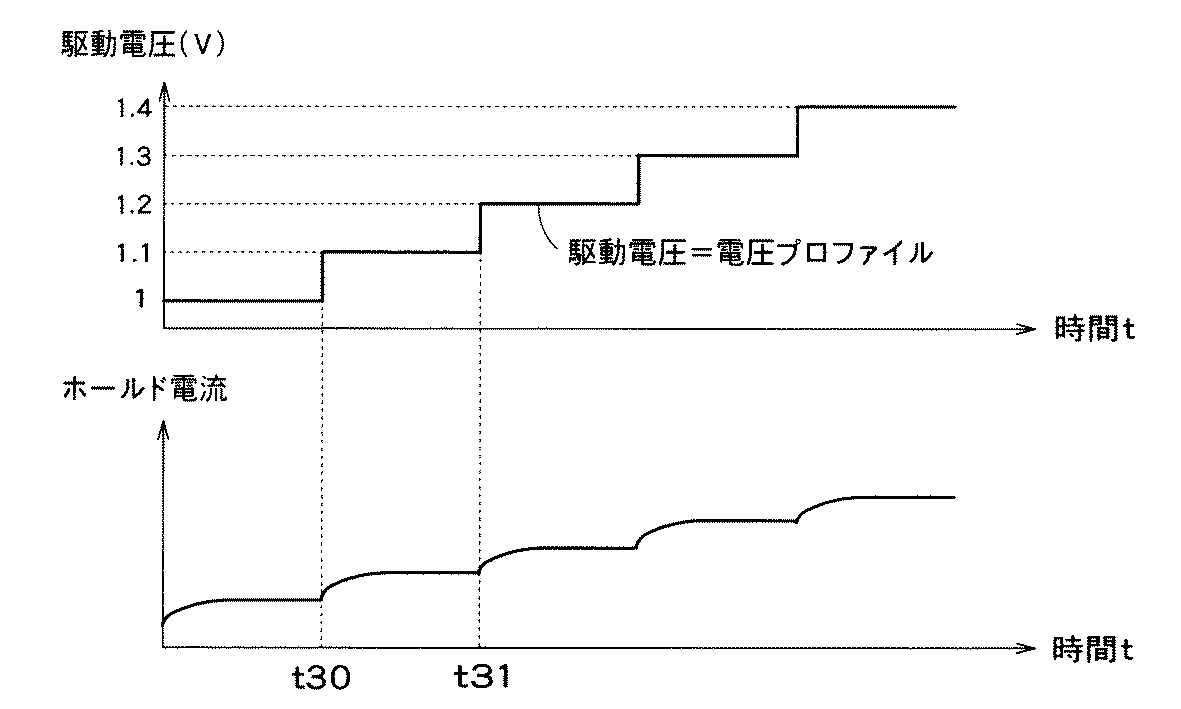
図6は、図2の時刻t11付近における、モータ駆動部41により印加される駆動電圧波形と、ホールド電流波形の拡大図である。電圧プロファイルには、一定時間間隔ごとに駆動電圧が段階的に(図6では0.1Vずつ)高くなるテーブルが設定されている。この電圧プロファイルに従って、駆動電圧がコイルに印加される。
例えば、時刻t30で1Vであった駆動電圧が1.1Vに設定されると、それに伴ってホールド電流も増加し、一定値に収束する。時刻t31で駆動電圧が1.2Vに設定されると、ホールド電流はさらに増加する。
駆動電圧が高くなるにつれて、ホールド電流も増加し、図2に示す線形に増加するホールド電流が生成される。図2の拡大図である図6に示すように、厳密には、ホールド電流は段階的に増加している。しかしながら、ホールド期間t10〜t12に比べ、駆動電圧が大きくなる間隔t30〜t31等は十分に短い。そのため、ホールド電流は漸次に線形に増加するとみなせる。
このように、第2の実施形態では、ステッピングモータ20の起動時、電圧値が段階的に大きくなる駆動電圧をコイルに印加する。よって、ホールド電流は線形に徐々に増加し、急激には増加しない。そのため、ロータが初期位置まで高速で移動することによる振動音あるいは衝撃音等の騒音を抑制できる。
上述した各実施形態では、ホールド電流を線形に増加させる例を示したが、必ずしも線形でなくてもよい。図7および図8は、励磁電流波形の別の例を示す図である。図7では、ホールド電流は下に凸の形状であり、ホールド期間の初期ほどホールド電流の変化率は小さい。一方、図8では、ホールド電流は上に凸の形状であり、ホールド期間の初期ほどホールド電流の変化率は大きい。
図2、図7および図8のいずれの場合でも、ホールド電流の変化率を所定値以下とし、ロータが初期位置まで高速で移動することによる騒音が発生しないよう、または、許容範囲内となるようにすればよい。この所定値は、例えば実験により定めることができる。
また、ホールド電流は、例えば下記(1)式で近似される直線または指数関数の形状であってもよい。
I=a*tb …(1)
ここで、Iはホールド電流、tはホールド時間の開始時刻(図2等の時刻t10)を基準とする時間、aおよびbは定数である。0<b<1の場合、図8と似た形状となり、b=1の場合、図2の形状となり、1<bの場合、図7と似た形状となる。
ここで、Iはホールド電流、tはホールド時間の開始時刻(図2等の時刻t10)を基準とする時間、aおよびbは定数である。0<b<1の場合、図8と似た形状となり、b=1の場合、図2の形状となり、1<bの場合、図7と似た形状となる。
また、ホールド電流は、例えば下記(2)式で近似される正弦波の形状であってもよい。
ここで、T0はホールド期間(時刻t10〜t12)、c,d,eは定数である。d=e=0の場合、図8と似た形状となり、d=3π/2,e=1の場合、図7と似た形状となる。
もちろん、上記(1),(2)式以外で近似される形状であってもよい。これらの形状のホールド電流は、第1の実施形態におけるターゲット電流または第2の実施形態における電圧プロファイルを適宜変更することにより実現できる。
上記の記載に基づいて、当業者であれば、本発明の追加の効果や種々の変形を想到できるかもしれないが、本発明の態様は、上述した個々の実施形態には限定されるものではない。特許請求の範囲に規定された内容およびその均等物から導き出される本発明の概念的な思想と趣旨を逸脱しない範囲で種々の追加、変更および部分的削除が可能である。
10,10a 制御装置
20 ステッピングモータ
30,30a 制御回路
31 CPU
32 電流測定部
33,33a メモリ
40,40a 駆動回路
41 モータ駆動部
42 電流センシング部
43 電圧制御部
20 ステッピングモータ
30,30a 制御回路
31 CPU
32 電流測定部
33,33a メモリ
40,40a 駆動回路
41 モータ駆動部
42 電流センシング部
43 電圧制御部
Claims (7)
- 複数のコイルに励磁電流を流してロータを回転させるステッピングモータの制御方法において、
前記ステッピングモータの起動時のホールド期間内に、前記ロータを所定の初期位置まで移動させるために前記コイルに流す励磁電流を、単位時間当たりの変化量が所定値以下となるように漸次に増加させることを特徴とするステッピングモータの制御方法。 - 前記単位時間当たりの変化量は、前記ロータが前記初期位置に移動する際に発生する騒音が所定の許容値以下となるように定められることを特徴とする請求項1に記載のステッピングモータの制御方法。
- 前記ステッピングモータの起動時のホールド期間内に、時間の経過と共にデューティ比が大きくなるパルス幅変調された駆動電圧、または、時間の経過と共に電圧値が高くなる駆動電圧を前記複数のコイルに印加し、
前記ホールド期間内に前記ロータが所定の初期位置に移動するように、時間の経過と共に漸次に増加する前記励磁電流を前記コイルに流すことを特徴とする請求項1または2に記載のステッピングモータの制御方法。 - 前記複数のコイルに流れる前記励磁電流を検出するステップと、
前記ホールド期間内に、前記検出された励磁電流が時間の経過と共に漸次に増加する予め定められたターゲット電流に近づくよう制御信号を生成するステップと、
前記制御信号に応じたデューティ比のパルス幅変調された前記駆動電圧を生成するステップと、を備えることを特徴とする請求項3に記載のステッピングモータの制御方法。 - 前記制御信号を生成するステップは、前記検出された励磁電流が前記ターゲット電流未満である場合は前記駆動電圧のデューティを大きくするべく前記制御信号を第1の値に設定し、前記検出された励磁電流が前記ターゲット電流に達した場合には前記複数のコイルへの駆動電圧の印加を停止するべく前記制御信号を第2の値に設定することを特徴とする請求項4に記載のステッピングモータの制御方法。
- 前記ホールド期間内の前記励磁電流が線形に増加するように、前記コイルに印加する駆動電圧を制御することを特徴とする請求項1乃至5のいずれかに記載のステッピングモータの制御方法。
- 複数のコイルに励磁電流を流してロータを回転させるステッピングモータの制御装置において、
前記ステッピングモータの起動時のホールド期間内に、前記ロータを所定の初期位置まで移動させるために前記コイルに流す励磁電流を、単位時間当たりの変化量が所定値以下となるように漸次に増加させる制御手段を備えることを特徴とするステッピングモータの制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010148895A JP2012016122A (ja) | 2010-06-30 | 2010-06-30 | ステッピングモータの制御方法および制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010148895A JP2012016122A (ja) | 2010-06-30 | 2010-06-30 | ステッピングモータの制御方法および制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012016122A true JP2012016122A (ja) | 2012-01-19 |
Family
ID=45601909
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010148895A Pending JP2012016122A (ja) | 2010-06-30 | 2010-06-30 | ステッピングモータの制御方法および制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012016122A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014111418A1 (de) | 2013-08-09 | 2015-02-12 | Minebea Co., Ltd. | Steuerungsgerät und Steuerungsverfahren für einen Schrittmotor |
| JP2017536503A (ja) * | 2014-12-01 | 2017-12-07 | エコラボ ユーエスエー インコーポレイティド | 流体を投与するためのダイアフラムポンプ、及びそれに応じた方法 |
| DE102018108193A1 (de) | 2017-04-11 | 2018-10-11 | Minebea Mitsumi Inc. | Steuereinrichtung und Steuerungsverfahren eines Schrittmotors |
| JP2019030033A (ja) * | 2017-07-25 | 2019-02-21 | 東芝テック株式会社 | モータ制御装置及びプリンタ |
| JP2019195232A (ja) * | 2018-05-01 | 2019-11-07 | コニカミノルタ株式会社 | モータ制御装置、搬送装置、画像形成装置、およびモータ制御方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06198987A (ja) * | 1992-12-28 | 1994-07-19 | Canon Inc | 記録装置 |
| JP2007060893A (ja) * | 2005-07-28 | 2007-03-08 | Matsushita Electric Ind Co Ltd | ステッピングモータ駆動装置及びその制御方法 |
-
2010
- 2010-06-30 JP JP2010148895A patent/JP2012016122A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06198987A (ja) * | 1992-12-28 | 1994-07-19 | Canon Inc | 記録装置 |
| JP2007060893A (ja) * | 2005-07-28 | 2007-03-08 | Matsushita Electric Ind Co Ltd | ステッピングモータ駆動装置及びその制御方法 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014111418A1 (de) | 2013-08-09 | 2015-02-12 | Minebea Co., Ltd. | Steuerungsgerät und Steuerungsverfahren für einen Schrittmotor |
| JP2015035926A (ja) * | 2013-08-09 | 2015-02-19 | ミネベア株式会社 | ステッピングモータの制御装置及びステッピングモータの制御方法 |
| US9257928B2 (en) | 2013-08-09 | 2016-02-09 | Minebea Co., Ltd. | Control device for stepping motor and control method for stepping motor |
| DE102014111418B4 (de) | 2013-08-09 | 2024-09-26 | Minebea Mitsumi Inc. | Steuerungsgerät und Steuerungsverfahren für einen Schrittmotor |
| JP2017536503A (ja) * | 2014-12-01 | 2017-12-07 | エコラボ ユーエスエー インコーポレイティド | 流体を投与するためのダイアフラムポンプ、及びそれに応じた方法 |
| US11067072B2 (en) | 2014-12-01 | 2021-07-20 | Ecolab Usa Inc. | Diaphragm pump for dosing a fluid and an according method |
| US10498270B2 (en) | 2017-04-11 | 2019-12-03 | Minebea Mitsumi Inc. | Control device for stepping motor and control method for stepping motor |
| JP2018182879A (ja) * | 2017-04-11 | 2018-11-15 | ミネベアミツミ株式会社 | ステッピングモータの制御装置及びステッピングモータの制御方法 |
| DE102018108193A1 (de) | 2017-04-11 | 2018-10-11 | Minebea Mitsumi Inc. | Steuereinrichtung und Steuerungsverfahren eines Schrittmotors |
| JP2019030033A (ja) * | 2017-07-25 | 2019-02-21 | 東芝テック株式会社 | モータ制御装置及びプリンタ |
| JP2019195232A (ja) * | 2018-05-01 | 2019-11-07 | コニカミノルタ株式会社 | モータ制御装置、搬送装置、画像形成装置、およびモータ制御方法 |
| CN110429873A (zh) * | 2018-05-01 | 2019-11-08 | 柯尼卡美能达株式会社 | 电机控制装置、输送装置、图像形成装置以及电机控制方法 |
| US10734932B2 (en) | 2018-05-01 | 2020-08-04 | Konica Minolta, Inc. | Motor controller, conveyor, image forming apparatus, and motor control method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4959460B2 (ja) | モータ起動装置及びモータ起動方法 | |
| US20080252239A1 (en) | Method capable of controlling brushless dc motor | |
| US9257928B2 (en) | Control device for stepping motor and control method for stepping motor | |
| JP6648063B2 (ja) | ステッピングモータの制御装置及びステッピングモータの制御方法 | |
| JP2012016122A (ja) | ステッピングモータの制御方法および制御装置 | |
| CN109983688A (zh) | 无刷电动机控制装置以及无刷电动机控制方法 | |
| JP2014128070A (ja) | モータ制御装置及びステッピングモータの制御方法 | |
| US9762159B2 (en) | Motor drive apparatus for driving stepping motor and control method therefor | |
| US9871485B2 (en) | Stepper motor driver circuit | |
| CN105991074B (zh) | 马达驱动控制装置以及马达驱动控制方法 | |
| JP6348869B2 (ja) | 計器の駆動制御装置 | |
| CN102215022A (zh) | 无刷直流马达的无感测器启动方法 | |
| US11165377B2 (en) | Control device for stepping motor and control method for stepping motor | |
| JP2019216499A (ja) | ブラシレスdcモータの制御方法及び制御装置 | |
| JP4415552B2 (ja) | モータの駆動装置及び駆動方法 | |
| JP2008220035A (ja) | ブラシレスモータ起動装置 | |
| US9571021B2 (en) | Motor control device and method for detecting out-of-step | |
| JP2018166387A (ja) | モータ制御装置及びステッピングモータの制御方法 | |
| WO2011024339A1 (ja) | モータ駆動装置およびモータ駆動方法 | |
| JP2008278643A (ja) | ステッピングモータ駆動装置 | |
| JP2006129543A (ja) | ステッピングモータ駆動装置およびステッピングモータ駆動方法 | |
| WO2011155189A1 (ja) | モータ駆動装置およびモータ駆動方法 | |
| US10469010B2 (en) | Motor drive controller, control method for motor drive controller, control program for motor drive controller, and method for determining number of divisions of basic step angle | |
| JP2009183094A (ja) | モータ回転制御装置、およびモータ回転制御方法 | |
| JP4394086B2 (ja) | ステッピングモータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140225 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140701 |